Изобретение относится к авиационным катапультируемым креслам, особенно в опасных режимах их применения.
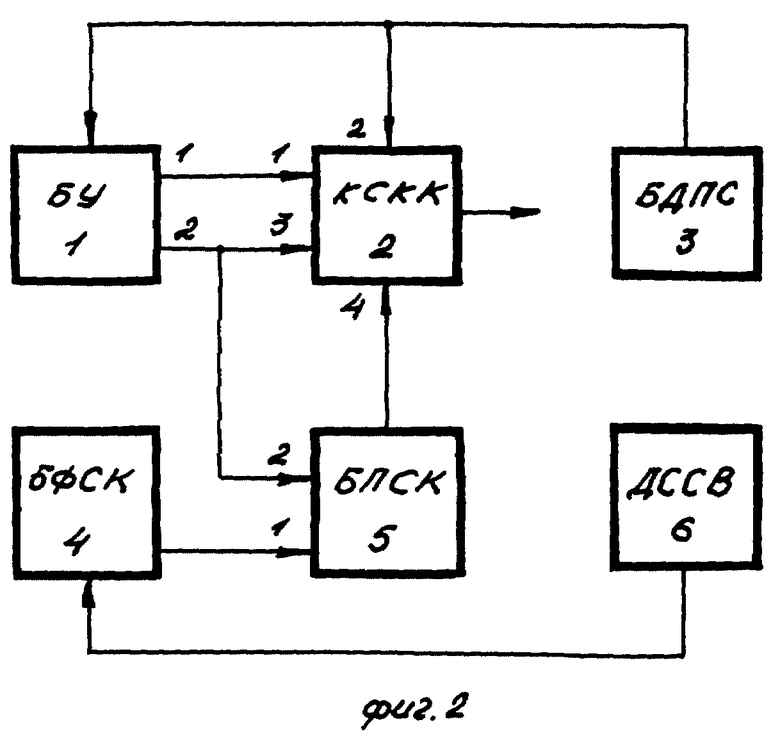
Известны системы управления катапультируемыми креслами, описания которых приведены в сборнике: [1] "Новости зарубежной науки и техники", и серия "Авиационная и ракетная техника", ЦАГИ, N 20, 1986 г., стр. 3 - 21; [2] патент США НКИ 224/122 N 4846421, МПК B 64 D 25/10. В качестве прототипа выбирается система, заявленная в вышеупомянутом патенте [2], структурно содержащая (см. фиг. 1):
блок управления БУ, контур стабилизации катапультируемого кресла КСКК,
блок датчиков параметров состояния БДПС.
По измеренным БДПС параметрам движения катапультируемого кресла с учетом движения носителя в БУ формируется сигнал управления x0, поступающий на первый вход КСКК, на второй вход которого поступает сигнал текущего состояния x•r (здесь r=r(p) - степенной полином оператора дифференцирования p).
Управление и включение органов стабилизации и управления катапультируемого кресла (стабилизирующие и маршевые двигатели, средства механизации), осуществляется по командам, поступающим со второго выхода БУ на третий вход КСКК, имеющего, например, по координате передаточную функцию ([3], Ю.П.Доброленский "Динамика полета в неспокойной атмосфере", Москва, Машиностроение, 1969, стр. 76 - 155):
(здесь r0, r1, r2 - степенные полиномы оператора p, u - составляющая скорости ветра), откуда следует что, например, при 
заданная траектория движения во времени возмущена действиями составляющих скорости ветра 
которые могут привести к опасной ситуации столкновения катапультируемого кресла и носителя.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является компенсация составляющих движения катапультируемого кресла от ветровых возмущений и как следствие этого повышение безопасности спасения членов экипажа в процессе катапультирования кресла.
Обеспечивается технический результат тем, что в систему управления катапультируемым креслом, содержащую последовательно соединенные блок управления и контур стабилизации катапультируемого кресла, а также блок датчиков параметров состояния, выход которого подключен ко входу блока управления и второму входу контура стабилизации катапультируемого кресла, на третий вход которого подключен второй выход блока управления, дополнительно введены последовательно соединенные датчик составляющих скорости ветра, блок формирования сигналов компенсации и блок подключения сигналов компенсации, выход которого подключен к четвертому входу контура стабилизации катапультируемого кресла, а второй вход блока подключения сигнала компенсации соединен со вторым выходом блока управления.
На фиг. 1 представлена блок-схема системы-прототипа, обозначения блоков приведено выше.
На фиг. 2 представлена блок схема предлагаемой системы, содержащей:
1 - блок управления БУ,
2 - контур стабилизации катапультируемого кресла КСКК,
3 - блок датчиков параметров состояния БДПС,
4 - блок формирования сигналов компенсации БФСК,
5 - блок подключения сигналов компенсации БПСК,
6 - датчик составляющих скорости ветра ДССВ.
Система работает следующим образом.
БДПС3 измеряет параметры состояния (например, координаты, составляющие скорости и ускорения движения, углы и угловые скорости эволюций), поступающие на вход БУ1 и на второй вход КСКК2.
Параметры состояния в БДПС3 формируются по данным навигационной системы носителя и(или) датчиков, установленных непосредственно в катапультируемом кресле. Примеры технического выполнения БДПС3 приведены, например, в [1] стр. 9, в книге [3] Помыкаева И.И. и др. "Навигационные приборы и системы", Москва, Машиностроение, 1983 г., стр. 401.
В БУ1 ([1], стр. 8; [2]) по поступившим на вход данным параметров состояния формируется сигнал управления x0, поступающий с первого выхода БУ1 на первый вход КСКСС2, и логические разовые команды ai, которые с второго выхода БУ1 поступают на третий вход КСКК2 и на второй вход БПСК5.
ДССВ6 является датчиком составляющих скорости ветра (см. например, [3], стр. 387), сигналы которых u с выхода ДССВ6 поступают на вход БФСК 4, по техническому исполнению являющегося линейным операционным блоком с передаточной функцией R(p)=R (см., например, книгу [4] Тетельбаума И.М. "400 схем для АВМ", Москва, Энергия, 1978 г., стр. 25).
Сформированный в БФСК4 сигнал u•R поступает на первый вход БПСК5.
БСПК5 является стандартным релейным элементом, на выходе которого сигнал y=u•R при ak=a(i=k) и сигнал y=o при ak=o. С выхода БПСК5 сигнал y поступает на четвертый вход КСКК2.
КСКК2 является катапультным креслом с двигательной установкой, включаемой и выключаемой по командам ai, при этом стабилизация осуществляется по углам и угловым скоростям эволюций, и(или) специальных стабилизирующих устройств ([1], стр. 16).
Движение КСКК2 по координате x имеет вид:
где r0, r1, r2 - степенные полиномы оператора дифференцирования p.
На начальной стадии катапультирования, например при перевернутом полете носителя и нисходящем ветровом потоке, когда действие ветра способствует разведению катапультируемогоо кресла и носителя, формируется ak=o, y=o и движение по координате x осуществляется с учетом действия ветра. После разведения катапультируемого кресла и носителя и начальной стадии катапультирования, когда компенсация ветра способствует разведению катапультируемого кресла и носителя (например, при пикирующем полете носителя и нисходящем ветровом потоке) по сигналу ak=a формируется y=u•R, R=r0/r1, тогда при заданном во времени сигнале управления
x= x3(t), т.е. движение катапультируемого кресла осуществляется с точным отслеживаем во времени заданного сигнала управления, соответствующего заданной траектории движения, что свидетельствует о достижении технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ КАТАПУЛЬТИРУЕМЫМ КРЕСЛОМ СПАСЕНИЯ ЭКИПАЖА | 1998 |
|
RU2144888C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ПРИ ПОСАДКЕ | 1996 |
|
RU2102281C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2079108C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1996 |
|
RU2093420C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2118831C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| МАГНИТНЫЙ КОМПАС | 1997 |
|
RU2126524C1 |
Изобретение относится к области оборудования авиационных катапультируемых кресел. В систему управления катапультируемым креслом спасения экипажа, содержащую блок датчиков параметров состояния, блок управления, контур стабилизации катапультируемого кресла, дополнительно введен контур компенсации ветровых возмущений в составе датчика составляющих скорости ветра, блока формирования сигнала компенсации, блока подключения сигналов компенсации. Предложенное техническое решение эффективно на начальном этапе катапультирования для быстрого пространственного разведения катапультируемого кресла и носителя. При использовании изобретения повышается безопасность спасения в процессе катапультирования. 2 ил.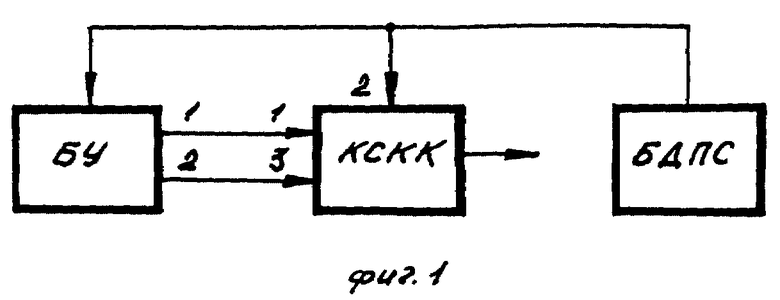
Система управления катапультируемым креслом спасения экипажа, содержащая последовательно соединенные блок управления и контур стабилизации катапультируемого кресла, а также блок датчиков параметров состояния, выход которого подключен к входу блока управления и к второму входу контура стабилизации катапультируемого кресла, на третий вход которого подключен второй выход блока управления, отличающаяся тем, что в нее дополнительно введены последовательно соединенные датчик составляющих скорости ветра, блок формирования сигналов компенсации и блок подключения сигналов компенсации, выход которого подключен к четвертому входу контура стабилизации катапультируемого кресла, а второй выход блока управления соединен с вторым входом блока подключения сигнала компенсации.
| US 4846421 A, 11.07.1989 | |||
| КАТАПУЛЬТНОЕ КРЕСЛО | 1997 |
|
RU2116938C1 |
| КАТАПУЛЬТНОЕ КРЕСЛО | 1989 |
|
SU1760731A1 |
| US 4236687 A, 02.12.1980. | |||

