Изобретение относится к области измерительной техники и может быть использовано в радионавигации при создании наземных фазовых радионавигационных систем.
Известна дальномерная система с измерением фазы радиосигнала [1], содержащая наземную и бортовую приемопередающие станции, при этом наземная передающая станция содержит приемопередающую антенну, передатчик и приемник, антенный переключатель, фазовый детектор, решающий блок, синтезатор частот, фазовращатель, генератор опорной частоты и коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и фазового детектора, выход которого соединен с входом решающего блока, выходы решающего блока соединены с управляющими входами синтезатора частот и фазовращателя, выход которого соединен с входом передатчика, выход генератора опорной частоты соединен с первым входом фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом фазовращателя и вторым входом приемника, выход которого соединен со вторым входом фазового детектора, бортовая приемопередающая станция содержит приемную антенну, передатчик, приемник, генератор опорной частоты, блок статистической обработки, выход которого соединен с индикатором, антенный переключатель, фазовый детектор, решающий блок, блок поправок, синтезатор частот и коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и фазового детектора, выход которого соединен с входом решающего блока, выходы решающего блока соединены с входом блока поправок, с управляющими входами коммутатора-формирователя, синтезатора частот и генератора опорной частоты, выход которого соединен с первым входом фазового детектора, входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входами передатчика и вторым входом приемника, выход которого соединен с вторым входом фазового детектора, выход блока поправок соединен с входом блока статистической обработки, причем блок поправок выполнен с возможностью реализации уравнения:
 , где
, где
∆γj - величина поправки на частоте fj;
с - скорость распространения радиоволн;
ψj - измеренный фазовый сдвиг на частоте fj;
j - текущий номер рабочей частоты, j=1, 2, … n.
Указанная дальномерная система позволяет выполнять измерение только одной дальности между бортовой и наземной приемопередающими станциями и не может быть использована для измерения координат и скорости движения объектов, находящихся, например, в прибрежной зоне.
Известна фазовая радиогеодезическая система (далее в материалах заявки названная фазовой радионавигационной системой) [2], взятая в качестве прототипа, включающая бортовую и одну или несколько наземных приемопередающих станций, при этом каждая наземная приемопередающая станция содержит приемопередающую антенну, передатчик и приемник, антенный переключатель, усилитель-ограничитель, фазовый детектор, решающий блок (далее вычислительный блок), синтезатор частот, фазовращатель, генератор опорной частоты (далее опорный генератор) и коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и фазового детектора, выход которого соединен с входом вычислительного блока, выходы вычислительного блока соединены с управляющими входами синтезатора частот и фазовращателя, выход которого соединен со входом передатчика, выход опорного генератора соединен с первым входом фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом фазовращателя и вторым входом приемника, выход которого соединен через усилитель-ограничитель со вторым входом фазового детектора, бортовая приемопередающая станция содержит приемопередающую антенну, передатчик, первый приемник, опорный генератор, индикатор, антенный переключатель, фазовый детектор, вычислительный блок, синтезатор частот, первый усилитель-ограничитель и коммутатор сигналов, коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и фазового детектора, выход которого соединен с входом вычислительного блока, выходы вычислительного блока соединены с входом индикатора, с управляющими входами коммутатора-формирователя, синтезатора частот и опорного генератора, выход которого соединен с первым входом фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом первого приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом передатчика и вторыми входами первого и второго приемников, выход первого приемника соединен через первый усилитель-ограничитель со вторым входом коммутатора сигналов, выход которого соединен с третьим входом фазового детектора, вход управления коммутатора сигналов соединен с выходом решающего блока.
Недостатком известной фазовой радионавигационной системы является использование информации сверхдлинноволновой (СДВ) радионавигационной системы (РНС), например, «Омега» для получения значений априорных координат бортовой приемопередающей станции (БС), используемых для расчета расстояний от БС до наземных приемопередающих станций (НС). Полученные значения априорных расстояний БС-НС используются в качестве априорных значений при разрешении фазовой неоднозначности. При отсутствии доступа к сигналам СДВ РНС получение однозначной оценки координат и дальностей по сигналам известной фазовой радионавигационной системы невозможно.
Задача изобретения состоит в обеспечении разрешения неоднозначности во всей рабочей зоне фазовой радионавигационной системы без необходимости использования результатов измерений по сигналам дополнительных радионавигационных систем, например СДВ РНС «Омега».
Поставленная задача решается тем, что в фазовой радионавигационной системе, содержащей не менее двух наземных и бортовую приемопередающие станции, в которой каждая наземная приемопередающая станция содержит приемопередающую антенну, передатчик и приемник, антенный переключатель, усилитель-ограничитель, фазовый детектор, вычислительный блок, синтезатор частот, фазовращатель, опорный генератор и коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и фазового детектора, выход которого соединен с входом вычислительного блока, выходы вычислительного блока соединены с управляющими входами синтезатора частот и фазовращателя, выход которого соединен с входом передатчика, выход опорного генератора соединен с первым входом фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом фазовращателя и вторым входом приемника, выход которого соединен через усилитель-ограничитель со вторым входом фазового детектора, бортовая приемопередающая станция содержит приемопередающую антенну, передатчик, первый приемник, опорный генератор, индикатор, антенный переключатель, первый фазовый детектор, вычислительный блок, синтезатор частот, первый усилитель-ограничитель, коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и первого фазового детектора, выход которого соединен с первым входом вычислительного блока, выходы вычислительного блока соединены с входом индикатора, с управляющими входами коммутатора-формирователя, синтезатора частот и опорного генератора, выход которого соединен с первым входом первого фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом первого приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом передатчика и вторым входом первого приемника, выход первого приемника соединен через первый усилитель-ограничитель со вторым входом первого фазового детектора, согласно изобретению в бортовую приемопередающую станцию введены приемная антенна, второй приемник, второй усилитель-ограничитель и второй фазовый детектор, причем приемная антенна выходом соединена с третьим входом антенного переключателя, второй выход которого соединен с первым входом второго приемника, второй вход которого подключен к выходу синтезатора частот, а выход через второй усилитель-ограничитель подключен ко второму входу второго фазового детектора, управляющим входом соединенного с выходом коммутатора-формирователя, первый вход фазового детектора подключен к выходу опорного генератора, выход второго фазового детектора соединен со вторым входом вычислительного блока, а в каждой из наземных приемопередающих станций третий и четвертый выходы вычислительного блока подключены к управляющим входам опорного генератора и коммутатора-формирователя соответственно.
Изобретение поясняется прилагаемыми чертежами, на которых изображены:
- фиг.1 - структурная схема фазовой радионавигационной системы, где приведены схемы бортовой приемопередающей (БС) и одной из наземных приемопередающих (НС) станций;
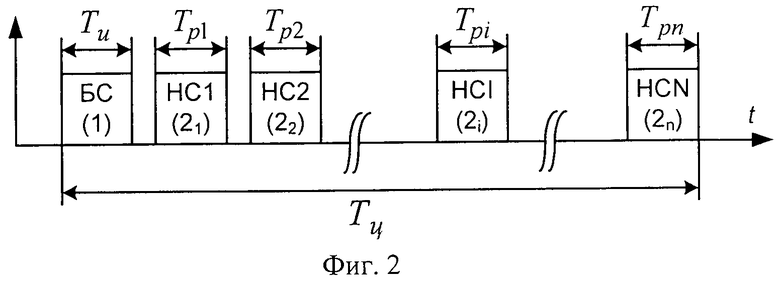
- фиг.2 - временная диаграмма, иллюстрирующая порядок излучения станций в рабочем цикле РНС;
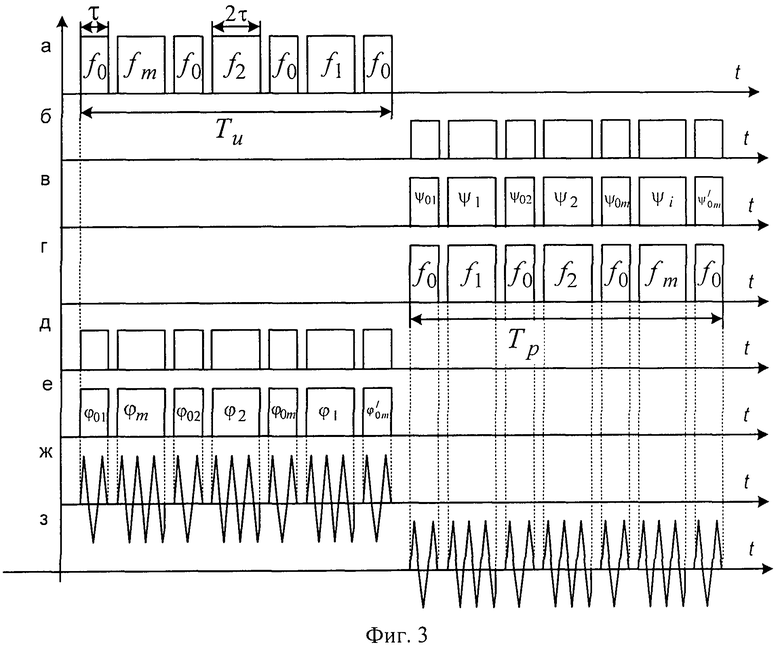
- фиг.3 - временная диаграмма формирования и приема сигналов бортовой и одной из наземных приемопередающих станций;
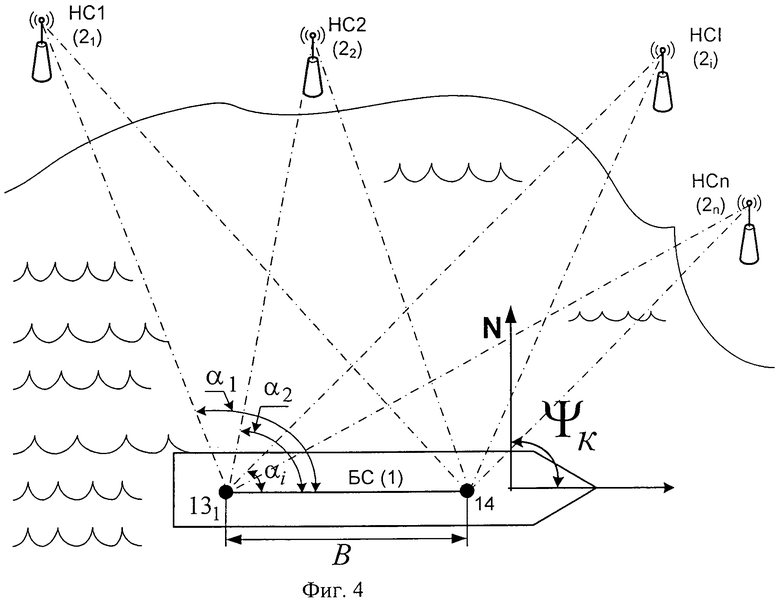
- фиг.4 - схема размещения аппаратуры наземной и бортовой приемопередающих станций;
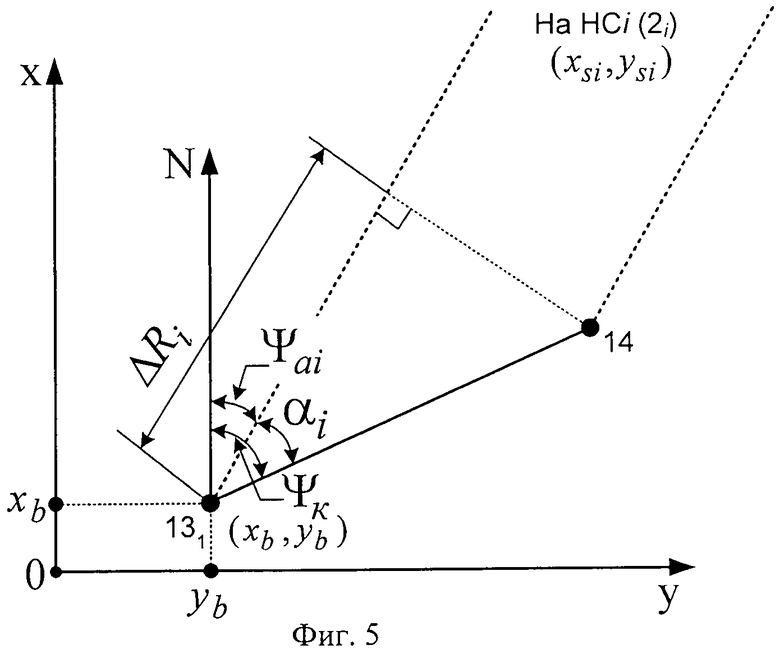
- фиг.5 - пояснение принципа определения направления с БС на НС;
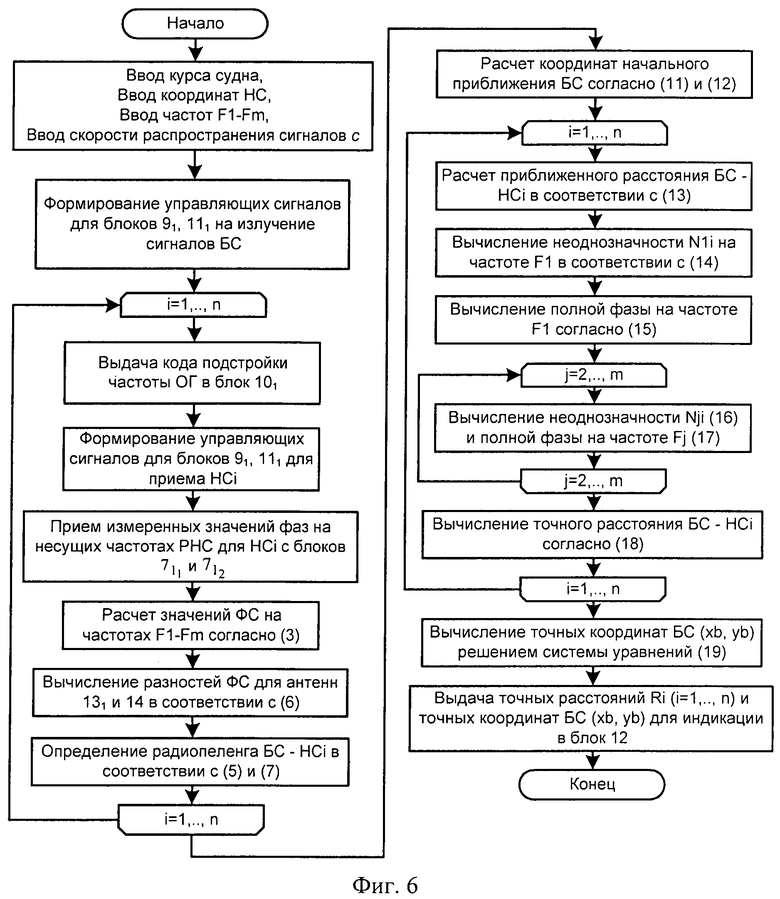
- фиг.6 - блок-схема алгоритма работы вычислительного блока приемопередающей БС;
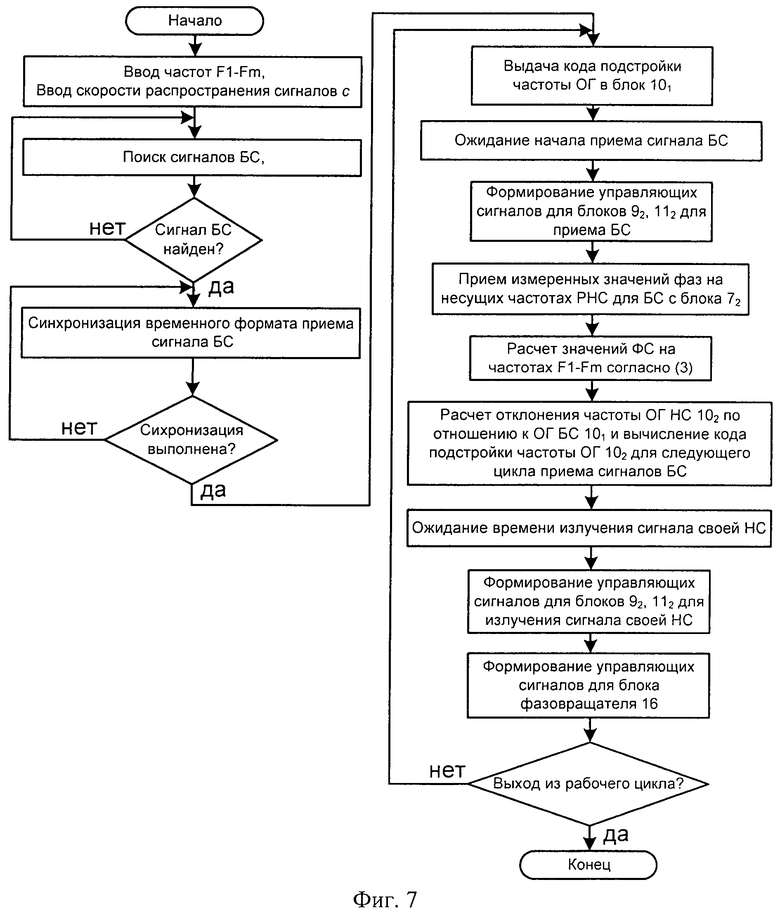
- фиг.7 - блок-схема алгоритма работы вычислительного блока приемопередающей НС.
Фазовая радионавигационная система (ФРНС) содержит бортовую приемопередающую станцию 1 и n наземных приемопередающих станций 21÷2n.
Бортовая приемопередающая станция ФРНС содержит последовательно соединенные передатчик 31, антенный переключатель 4, первый приемник  , первый усилитель-ограничитель
, первый усилитель-ограничитель  , первый фазовый детектор
, первый фазовый детектор  , вычислительный блок 81 и синтезатор частот 91, выходом соединенный с первым входом передатчика 31. Второй и третий выходы вычислительного блока 81 соединены соответственно с управляющими входами опорного генератора 101 и коммутатора-формирователя 111, а четвертый выход вычислительного блока 81 соединен с индикатором 12. Антенный переключатель 4 вторым и третьим входами соединен с приемопередающей антенной 131 и приемной антенной 14 соответственно, вторым выходом подключен к последовательно соединенным второму приемнику
, вычислительный блок 81 и синтезатор частот 91, выходом соединенный с первым входом передатчика 31. Второй и третий выходы вычислительного блока 81 соединены соответственно с управляющими входами опорного генератора 101 и коммутатора-формирователя 111, а четвертый выход вычислительного блока 81 соединен с индикатором 12. Антенный переключатель 4 вторым и третьим входами соединен с приемопередающей антенной 131 и приемной антенной 14 соответственно, вторым выходом подключен к последовательно соединенным второму приемнику  , второму усилителю-ограничителю
, второму усилителю-ограничителю  и второму фазовому детектору
и второму фазовому детектору  , выходом соединенному со вторым входом вычислительного блока 81, а управляющим входом - к одному из выходов коммутатора-формирователя 111. Второй выход коммутатора-формирователя 111 соединен с управляющими входами первого и второго фазовых детекторов
, выходом соединенному со вторым входом вычислительного блока 81, а управляющим входом - к одному из выходов коммутатора-формирователя 111. Второй выход коммутатора-формирователя 111 соединен с управляющими входами первого и второго фазовых детекторов  и
и  , а третий его выход - с управляющим входом передатчика 31. Выход опорного генератора 101 соединен с коммутатором-формирователем 111, первым
, а третий его выход - с управляющим входом передатчика 31. Выход опорного генератора 101 соединен с коммутатором-формирователем 111, первым  и вторым
и вторым  фазовыми детекторами и синтезатором частот 91, который своим вторым выходом подключен ко вторым входам приемников
фазовыми детекторами и синтезатором частот 91, который своим вторым выходом подключен ко вторым входам приемников  и
и  .
.
Каждая из наземных приемопередающих станций 2 содержит последовательно соединенные передатчик 32, антенный переключатель 15, приемник 52, усилитель-ограничитель 62, фазовый детектор 72, вычислительный блок 82, синтезатор частот 92 и фазовращатель 16, выходом соединенный с первым входом передатчика 32. Второй выход вычислительного блока 82 соединен с фазовращателем 16, третий и четвертый выходы вычислительного блока 82 соединены с управляющими входами соответственно опорного генератора 102 и коммутатора-формирователя 112. Выходами коммутатор-формирователь 112 соединен с управляющими входами соответственно передатчика 32, фазового детектора 72 и антенного переключателя 15, соединенного с приемопередающей антенной 132, а опорный генератор 102 выходом соединен со вторым входом коммутатора-формирователя 112, с третьим входом фазового детектора 72 и вторым входом синтезатора частот 92, который своим вторым выходом соединен со вторым входом приемника 52.
Устройство работает следующим образом.
Опорные генераторы 10 вырабатывают непрерывные гармонические сигналы частотой f, которые поступают на коммутаторы-формирователи 11 и синтезаторы частот 9. Синтезаторы частот 9 вырабатывают для излучения опорный сигнал с частотой f0 и m вспомогательных сигналов с частотами f1, f2, …, fm, кроме того, в синтезаторах частот 9 формируются сигналы гетеродина для приемников 5 с частотами f0Г, f1Г, f2Г, …, fmГ, при этом управление частотой излучаемых (принимаемых) сигналов осуществляется вычислительными блоками 8 таким образом, чтобы между частотами сигналов и гетеродина выполнялись соотношения:

f1-f1Г=fпр,
f2-f2Г=fпр,
…
fj-fjГ=fпр,
…
fm-fmГ=fпр,
где
j=1, …, m - текущий номер вспомогательного сигнала с частотой fj;
m - общее число вспомогательных частот;
fпр - промежуточная частота, на которой осуществляется измерение фазы принятых сигналов.
Последовательность излучения БС и НС в рабочем цикле ФРНС представлена на фиг.2, где интервал Ти соответствует интервалу излучения БС; Тp1, …, Трn - интервалы ретрансляции сигналов БС наземными станциями; n - общее число НС; Тц - длительность временного цикла работы ФРНС. В соответствии с фиг.2 в предлагаемой ФРНС использовано временное разделение сигналов станций, что позволяет исключить возможное влияние сигналов станций друг на друга. Интервал времени между излучением сигналов соседних станций подбирается таким образом, чтобы не допустить возможность взаимного перекрытия во времени сигналов станций во всей рабочей зоне ФРНС.
Коммутаторы-формирователи 11 вырабатывают сигналы управления для блоков 31 (фиг.3, а), 4 (фиг.3, б), 
 (фиг.3, в), 32 (фиг.3, г), 15 (фиг.3, д), 72 (фиг.3, е). Временные диаграммы на фиг.3 приведены для установившегося режима заявляемой системы, когда временные интервалы излучения и приема сигналов БС 1 синхронизированы с соответствующими интервалами наземных приемопередающих станций НС 2. На временной диаграмме фиг.3 изображены сигналы, излучаемые в пространство приемопередающей БС 1 (фиг.3, ж) и одной из НС 2 (фиг.3, з), например НС 21. Сигналы НС 22 - НС 2n, следующие по времени за сигналами НС 21, аналогичны сигналам НС 21, поэтому на временной диаграмме фиг.3, с целью упрощения пояснений, не приведены. На фиг.3 обозначены: Tи - длительность интервала излучения сигналов БС; Тр - длительность интервала ретрансляции сигналов бортовой станции наземной станцией НС 21; τ - интервал излучения (приема) опорного сигнала частотой f0; 2τ - интервал излучения (приема) вспомогательных сигналов с частотами fj.
(фиг.3, в), 32 (фиг.3, г), 15 (фиг.3, д), 72 (фиг.3, е). Временные диаграммы на фиг.3 приведены для установившегося режима заявляемой системы, когда временные интервалы излучения и приема сигналов БС 1 синхронизированы с соответствующими интервалами наземных приемопередающих станций НС 2. На временной диаграмме фиг.3 изображены сигналы, излучаемые в пространство приемопередающей БС 1 (фиг.3, ж) и одной из НС 2 (фиг.3, з), например НС 21. Сигналы НС 22 - НС 2n, следующие по времени за сигналами НС 21, аналогичны сигналам НС 21, поэтому на временной диаграмме фиг.3, с целью упрощения пояснений, не приведены. На фиг.3 обозначены: Tи - длительность интервала излучения сигналов БС; Тр - длительность интервала ретрансляции сигналов бортовой станции наземной станцией НС 21; τ - интервал излучения (приема) опорного сигнала частотой f0; 2τ - интервал излучения (приема) вспомогательных сигналов с частотами fj.
В соответствии с временной диаграммой фиг.3 БС излучает вспомогательные частоты f1-fm в обратном порядке (фиг.3, а), т.е. последовательность излучения вспомогательных частот для БС имеет вид: fm, …, f2, f1, в то время как НС излучают вспомогательные частоты в прямом порядке, т.е. в последовательности f1, …, f2, fm (фиг.3, г).
Измененный порядок излучения вспомогательных частот позволяет однозначно идентифицировать сигналы БС, что требуется каждой из НС для определения своего места во временном формате излучения ФРНС в зависимости от назначенного ей номера.
Для определения координат БС требуется одновременная работа не менее двух НС 2 (n≥2), при этом на временной диаграмме появятся дополнительные интервалы излучения для других НС, работающих в составе ФРНС, что приведет к увеличению длительности временного цикла работы устройства Тц (фиг.2).
В передатчике БС 31 осуществляется усиление сигналов от синтезатора частот 91 до необходимой величины и формирование выходных радиоимпульсных сигналов под воздействием управляющих сигналов от коммутатора-формирователя 111 (фиг.3а). Радиоимпульсный сигнал от передатчика 31, пройдя через антенный переключатель 4, излучается в пространство приемопередающей антенной 131 (фиг.3, ж). Сигнал, излученный в пространство БС 1 в течение времени Ти, пройдя через среду распространения, принимается приемопередающей антенной 132 каждой из НС 2 и через антенный переключатель 15 поступает на вход приемника 52. На второй вход приемника 52 подаются сигналы от синтезатора частот 92 с частотами f0Г, fmГ, …, f1Г. В приемнике 52 осуществляется преобразование принимаемого сигнала на промежуточную частоту fпр согласно соотношениям (1), а также фильтрация и усиление сигнала промежуточной частоты fпр.
Затем принятый сигнал с частотой fпр подвергается нормированию по амплитуде в усилителе-ограничителе 62 и поступает на фазовый детектор 72. В фазовом детекторе 72 под воздействием управляющих сигналов (фиг.3, е) осуществляется измерение фазовых сдвигов (ФС) принятых сигналов, при этом измеряются ФС φ01, φ02, …, φ0m, φ′0m сигналов частоты f0 и ФС φm, …, φ2, φ1 вспомогательных сигналов с частотами fm, …, f2, f1. Информация с фазового детектора 72 поступает в вычислительный блок 82, в котором вычисляются фазовые соотношения:

Полученные значения ФС ∆φ1, ∆φ2, …, ∆φm запоминаются в вычислительном блоке 82. В течение интервала Тр излучаются в пространство сигналы от блока НС 2, при этом управление частотой и фазой излучаемых сигналов осуществляется вычислительным блоком 82 через блоки синтезатора частот 92 и фазовращателя 16 соответственно. В моменты времени τ, когда передатчиком 32 излучаются в пространство основные сигналы частотой f0, фазовращатель 16 вычислительным блоком 82 устанавливается в исходное (нулевое) состояние. При этом излучаемые опорные сигналы частотой f0 имеют фазу сигнала опорного генератора 102. В течение интервалов 2τ, когда передатчиком 32 излучаются вспомогательные сигналы с частотами f1, f2, …, fm, сигналами управления от вычислительного блока 82 в фазовращателе 16 устанавливаются ФС ∆φ1, ∆φ2, …, ∆φm соответственно.
Таким образом, в течение интервала времени Тр передатчик 32 НС 21 излучает вспомогательные сигналы, фаза которых равна фазе принятых сигналов в течение интервалов Ти от приемопередающей БС 1, а также сигналы, фаза которых равна фазе опорного генератора 102.
В передатчике 32 осуществляется усиление сигналов от фазовращателя 16 и формирование выходных радиоимпульсных сигналов под воздействием управляющих сигналов от коммутатора-формирователя 112 (фиг.3, г). Радиоимпульсный сигнал от передатчика 32, пройдя через антенный переключатель 15, излучается в пространство приемопередающей антенной 132 ( фиг.3. з).
Сигнал, излученный в пространство приемопередающей НС 2 в течение интервала времени ретрансляции Тp, пройдя через среду распространения, принимается приемопередающей антенной 131 и приемной антенной 14 блока приемопередающей БС 1 и через антенный переключатель 4, управляемый коммутатором-формирователем 111 в соответствии с временной диаграммой (фиг.3б), поступает на входы приемников  и
и  от антенн 131 и 14 соответственно. На вторые входы приемников
от антенн 131 и 14 соответственно. На вторые входы приемников  и
и  подаются сигналы от синтезатора частот 91 с частотами f0Г, f1Г, …, fmГ. В приемниках
подаются сигналы от синтезатора частот 91 с частотами f0Г, f1Г, …, fmГ. В приемниках  и
и  осуществляется преобразование сигналов на частоту fпр согласно соотношению (1). Сигналы с частотой fпр фильтруются и усиливаются, а затем нормируются по амплитуде в усилителях-ограничителях
осуществляется преобразование сигналов на частоту fпр согласно соотношению (1). Сигналы с частотой fпр фильтруются и усиливаются, а затем нормируются по амплитуде в усилителях-ограничителях 
 и поступают на фазовые детекторы
и поступают на фазовые детекторы 
 . В фазовых детекторах
. В фазовых детекторах 
 под воздействием управляющих сигналов (фиг.3, в) коммутатора-формирователя 111 осуществляется измерение (ФС) принятых сигналов, при этом измеряются ФС ψ01, ψ02, …, ψ0m, ψ′0m опорных сигналов частоты f0 и ФС ψ1, ψ2, …, ψm вспомогательных сигналов с частотами f1, f2, …, fm. Информация с фазовых детекторов
под воздействием управляющих сигналов (фиг.3, в) коммутатора-формирователя 111 осуществляется измерение (ФС) принятых сигналов, при этом измеряются ФС ψ01, ψ02, …, ψ0m, ψ′0m опорных сигналов частоты f0 и ФС ψ1, ψ2, …, ψm вспомогательных сигналов с частотами f1, f2, …, fm. Информация с фазовых детекторов 
 поступает в вычислительный блок 81, в котором вычисляются фазовые соотношения:
поступает в вычислительный блок 81, в котором вычисляются фазовые соотношения:


В результате в вычислительном блоке 81 происходит определение значений ФС сигналов ∆ψ1, ∆ψ2, …, ∆ψm, принятых разнесенными на расстояние В антеннами 131 и 14 БС (фиг.4).
Поскольку измерения ФС сигналов осуществляется независимо по сигналам, принятым антеннами 131 и 14, то в вычислительный блок 81 с фазовых детекторов 
 поступают значения ФС, пропорциональные расстояниям от НС до точек 131 и 14 БС. Для точки расположения приемопередающей антенны 131 фазовым детектором
поступают значения ФС, пропорциональные расстояниям от НС до точек 131 и 14 БС. Для точки расположения приемопередающей антенны 131 фазовым детектором  будут измерены ФС
будут измерены ФС  ,
,  , …,
, …,  , а точки расположения приемной антенны 14 вторым фазовым детектором
, а точки расположения приемной антенны 14 вторым фазовым детектором  будут измерены ФС
будут измерены ФС  ,
,  , …,
, …,  .
.
Полученные значения ФС  ,
,  , …,
, …,  и ФС
и ФС  ,
,  , …,
, …,  запоминаются в вычислительном блоке 81 и используются для устранения многозначности фазовых отсчетов.
запоминаются в вычислительном блоке 81 и используются для устранения многозначности фазовых отсчетов.
На практике частоты f0, f1, f2, …, fm выбираются таким образом, чтобы выполнялись соотношения:

Fm - частота m-й ступени (рабочая частота фазовой радионавигационной системы);
F1, F2, …, Fm-1 - частоты грубых ступеней, расположенные в порядке их возрастания;
k1, k2, …, km-1 - коэффициенты сопряжения частот.
В дальнейших материалах заявки частоты F1, F2, …, Fm будут называться метрическими частотами.
При использовании фазового метода определения радионавигационных параметров (РНП), представляющих в данном случае удвоенные значения расстояний между приемопередающей БС 1 и каждой из приемопередающих НС 2, диапазон однозначной оценки РНП определяется самой низкой из метрических частот (F1) и находится в пределах от  до
до  , где
, где  - длина волны сигнала с частотой F1, с - скорость распространения сигналов.
- длина волны сигнала с частотой F1, с - скорость распространения сигналов.
В силу необходимости обеспечения работы большого числа НС и реализации высокого темпа выдачи координат БС, метрическая частота F1, как правило, не обеспечивает однозначного определения расстояний во всей рабочей зоне ФРНС. Кроме того, как было указано выше, величина ФС ∆ψ1 на метрической частоте F1 соответствует сигналу данной частоты, прошедшему удвоенное расстояние от БС до НС. Перечисленные факторы приводят к необходимости задания начальных значений расстояний от БС i-й НС  с погрешностью не более
с погрешностью не более  , поскольку реальная фазометрическая аппаратура выполняет измерения ФС в пределах ±180°, что соответствует половине длины волны сигнала, на котором происходят измерения ФС.
, поскольку реальная фазометрическая аппаратура выполняет измерения ФС в пределах ±180°, что соответствует половине длины волны сигнала, на котором происходят измерения ФС.
В прототипе изобретения для начальной оценки значений расстояний  (i=1, …, n) между БС и НС было предложено использовать результаты определения координат БС, полученных по каналу СДВ РНС, например «Омега». Для этого требуется, чтобы БС находилась в рабочей зоне СДВ РНС с обеспечением возможности приема сигналов не менее чем трех станций данной СДВ РНС [3]. Следует отметить, что в настоящее время в связи с развитием спутниковых радионавигационных систем поддержка функционирования СДВ систем сокращена и вышеприведенное условие не всегда выполняется на территории РФ и прилегающих морских акваторий.
(i=1, …, n) между БС и НС было предложено использовать результаты определения координат БС, полученных по каналу СДВ РНС, например «Омега». Для этого требуется, чтобы БС находилась в рабочей зоне СДВ РНС с обеспечением возможности приема сигналов не менее чем трех станций данной СДВ РНС [3]. Следует отметить, что в настоящее время в связи с развитием спутниковых радионавигационных систем поддержка функционирования СДВ систем сокращена и вышеприведенное условие не всегда выполняется на территории РФ и прилегающих морских акваторий.
В данном изобретении для определения начальных координат бортовой станции и грубых значений расстояний  (i=1, …, n) предлагается использовать радиопеленгационный метод определения приближенных координат БС. При этом не требуется использования сигналов дополнительных РНС, а определение начальных значений при устранении неоднозначности осуществляется ФРНС автономно. Для решения поставленной задачи может быть использован интерферометрический метод измерения курсовых углов с БС на НС.
(i=1, …, n) предлагается использовать радиопеленгационный метод определения приближенных координат БС. При этом не требуется использования сигналов дополнительных РНС, а определение начальных значений при устранении неоднозначности осуществляется ФРНС автономно. Для решения поставленной задачи может быть использован интерферометрический метод измерения курсовых углов с БС на НС.
При интерферометрическом методе измерения курсовых углов используется прием сигналов на разнесенные на некоторое расстояние В антенны. При этом измеряется разность хода сигналов ∆Ri от i-й приемопередающей НС на две разнесенные антенны БС 131 и 14 (фиг.5).
Косинус угла курсового угла αi между вектором, соединяющим антенны 131 и 14, и вектором-направлением от БС на приемопередающую антенну 132 i-й НС связан со значением разности фаз сигналов, принятых антеннами 131 и 14, следующим соотношением:

i=1, …, n - текущий номер наземной станции;
n - общее число наземных станций, сигналы которых принимает БС;
λi - длина волны сигнала i-й НС на измерительной частоте;
В - расстояние между антеннами 131 и 14;
∆Ri - разность хода сигнала i-й НС до антенн 131 и 14;
Фi=2π·Ni+φi - значение полного ФС между сигналами i-й НС, принимаемыми антеннами 131 и 14 БС 1;
φi - измеренное значение ФС, находящееся в пределах ±180° (±0.5 фазовых цикла (ф.ц.));
Ni - целочисленная неоднозначность, соответствующая целому числу фазовых циклов, укладывающихся в полном ФС.
Значение ФС с целью получения максимальной точности определения грубых координат может быть вычислено на метрической частоте Fm фазовой РНС. В этом случае значение ФС определяется на основе измеренных значений ФС для антенн 131 и 14 как:

m - номер самой точной ступени устранения неоднозначности, соответствующей рабочей частоте РНС Fm.
Если расстояние между антеннами В будет меньше λm/2, то значение фазового сдвига Φmi не будет содержать целочисленной неоднозначности. В этом случае согласно выражению (6) будут однозначно определены курсовые углы α1, α2, …, αn до каждой из наземных станций (фиг.4). При известном значении курса ψк судна-носителя БС, при расположении антенн 131 и 14, например, параллельно продольной оси судна значения азимутов направлений от антенны 131 БС на приемопередающие антенны 132 каждой из НС (радиопеленгов на НС) могут быть определены согласно выражению:

i=1, …, n - текущий номер принимаемой НС;
n - общее число принимаемых НС;
ψai - радиопеленг с БС на i-ю НС.
Используя известные значения радиопеленгов Ψa1, …, Ψan для n≥2 НС можно найти координаты БС, используя известные выражения, связывающие азимуты и координаты НС и БС, согласно которым азимут на i-ю НС в системе прямоугольных координат Гаусса-Крюгера [4, стр.129] определяется как:
xsi, ysi - координаты i-й НС;
 ,
,  - приближенные координаты приемопередающей антенны 131, подлежащие определению.
- приближенные координаты приемопередающей антенны 131, подлежащие определению.
В результате для n≥2 НС будет получена система из n уравнений вида (8) с 2 неизвестными - приближенными координатами БС  ,
,  , соответствующими координатам приемопередающей антенны 131.
, соответствующими координатам приемопередающей антенны 131.

Перенеся неизвестные приближенные координаты БС в левую часть, систему уравнений (9) можно записать следующим образом:
Уравнения (10) в матричной форме записи примут вид:

 - матрица коэффициентов системы уравнений (11), размерностью n×2;
- матрица коэффициентов системы уравнений (11), размерностью n×2;
 - вектор свободных членов из n элементов;
- вектор свободных членов из n элементов;
 - вектор неизвестных координат БС, подлежащих определению радиопеленгационным методом.
- вектор неизвестных координат БС, подлежащих определению радиопеленгационным методом.
В силу избыточности уравнений (11) их решение удобно осуществлять по методу наименьших квадратов (МНК). В этом случае решение системы (11) запишется в виде:

В результате решения системы уравнений (11) определяют неизвестные приближенные координаты БС  ,
,  , которые в дальнейшем используются в качестве координат начального приближения в процедуре разрешения многозначности фазовых измерений, осуществляемой, например, по методу пересчета измерений (МПИ) [5].
, которые в дальнейшем используются в качестве координат начального приближения в процедуре разрешения многозначности фазовых измерений, осуществляемой, например, по методу пересчета измерений (МПИ) [5].
Координаты начального приближения, найденные в соответствии с (12), используются для вычисления начальных значений дальностей БС - i-я НС  в соответствии с выражением:
в соответствии с выражением:

i=1, …, n - текущий номер принимаемой НС.
Согласно МПИ значения целочисленной неоднозначности N1i для первой метрической частоты F1 определяются в соответствии с выражением:

i=1, …, n - текущий номер принимаемой НС;
n≥2 - общее число принимаемых НС;
N1i - значение целочисленной неоднозначности фазовых измерений на дорожке, образованной частотой F1 для i-й НС;
λ1 - длина волны сигнала первой метрической частоты;  - значение измеренного ФС сигнала первой метрической частоты;
- значение измеренного ФС сигнала первой метрической частоты;
[.] - операция выделения целой части числа.
После определения N1i вычисляется значение полного ФС для сигнала первой метрической частоты F1:

Ψ1i - полный ФС между принятым от i-й НС сигналом и сигналом, излученным БС, пропорциональный двойному расстоянию от БС до i-й НС.
Затем осуществляется последовательное разрешение неоднозначности (РН) для каждой из ступеней вплоть до самой точной ступени m, образованной рабочей метрической частотой Fm. Процедура РН осуществляется в соответствии с выражениями:


j=2, …, m - текущий номер ступени РН; m - общее число ступеней РН;
λj-1 - длина волны сигнала с частотой Fj-1; λi - длина волны сигнала с частотой Fj; Ψ(j-1)i - значение полного ФС сигнала i-й НС на частоте Fj-1;
Ψji - значение полного ФС сигнала i-й НС на частоте Fj;
Nji - значение целочисленной неоднозначности в полном ФС сигнала i-й НС на частоте Fj;
 - измеренное значение ФС сигнала i-й НС на частоте Fj для точки расположения фазового центра приемопередающей антенны 131.
- измеренное значение ФС сигнала i-й НС на частоте Fj для точки расположения фазового центра приемопередающей антенны 131.
Таким образом, в соответствии с выражениями (16) и (17) осуществляется последовательное определение полных ФС для частот F2, …, Fm. По окончании РН становятся известными значения полных ФС Ψmi на рабочей частоте ФРНС, соответствующей наивысшей метрической частоте Fm.
Полученные значения полных ФС Ψm1, Ψm2, …, Ψmn с устраненной многозначностью соответствуют сигналам с частотой Fm, прошедшим дважды через среду распространения расстояние от БС до соответствующей НС. Значения полных ФС пропорциональны времени запаздывания радиоволн в точке приема по отношению к моменту их излучения и не содержат фазовых набегов, обусловленных аппаратурой блоков БС 1 и НС 21÷2n.
Значения Ψm1, Ψm2, …, Ψmn используются для точного определения расстояния Ri между антенной 131 блока 1 (БС) и антенной 132 блока 2 (НС) при известной скорости распространения радиоволн по формуле:
с - скорость распространения радиоволн.
Полученные значения точных расстояний Ri между БС и НС используются для вычисления координат БС путем решения системы из n уравнений для дальномерного режима определения места:

i=1, …, n - текущий номер НС; n - общее число НС.
Решение системы нелинейных уравнений (19) с целью определения точных координат БС может быть осуществлено, например, на основе итерационного метода, рассмотренного в [6, стр.49-53].
Блок-схема алгоритма работы вычислительного блока 81 при определении координат БС 1 в составе предложенной ФРНС приведена на фиг.6.
Данный алгоритм приведен для одного шага обработки результатов измерений ФС по сигналам HC1-HCn, в аппаратуре предусмотрено циклическое повторение алгоритма с периодом, соответствующим длительности рабочего цикла РНС Тц.
На первом шаге данного алгоритма осуществляется ввод исходных данных, в частности: текущего курсового угла судна Ψк; координат всех НС; метрических частот F1÷Fm; скорости распространения сигналов в атмосфере с.
Затем начинается циклическая работа алгоритма с периодом повторения Тц.
При этом осуществляется формирование управляющих сигналов для блоков синтезатора частоты 91 и коммутатора-формирователя 111 в соответствии с временной диаграммой для интервала времени излучения Ти, приведенной на фиг.3. По окончании излучения сигнала БС вычислительный блок 81 переходит в режим поочередного приема сигналов НС, что соответствует показанному на блок-схеме алгоритма циклу приема i=1, …, n. В данном цикле i соответствует текущему номеру принимаемой НС, общее число принимаемых БС НС составляет n.
В цикле приема сигнала i-й НС осуществляются следующие действия.
На первом шаге осуществляется выдача кода подстройки частоты ОГ БС 101 в соответствии с определенным отклонением частоты ОГ БС по отношению к сигналу текущей принимаемой НС. Определение величины отклонения частоты ОГ может быть осуществлено на основе анализа значений ФС ψ01, ψ02, …, ψ0m, ψ′0m от сигналов с частотой f0, принятых от каждой из НС. При этом обеспечивается подстройка частоты ОГ 101 под частоту ОГ 102 текущей принимаемой НС, что исключает погрешность измерения ФС, вызванную частотным рассогласованием сигналов БС и НС. Алгоритм определения отклонения частоты ОГ для приведенной в материалах заявки структуры сигналов ФРНС может быть реализован в соответствии с [7].
Далее осуществляется формирование управляющих сигналов для блоков синтезатора частоты 91 и коммутатора-формирователя 111 для интервала ретрансляции Тр, приведенного на фиг.3. При этом в вычислительном блоке 81 принимаются и запоминаются измеренные значения фазовых сдвигов ψ01, ψ02, …, ψ0m, ψ′0m опорных сигналов частоты f0 фазовых сдвигов ψ1, ψ2, …, ψm вспомогательных сигналов с частотами f1, f2, …, fm измеренных блоками фазовых детекторов  и
и  . Далее в соответствии с выражением (3) осуществляется расчет разностей фазовых сдвигов
. Далее в соответствии с выражением (3) осуществляется расчет разностей фазовых сдвигов  ,
,  , …,
, …,  для точки 131 и
для точки 131 и  ,
,  , …,
, …,  для точки 14. Затем происходит расчет разностей ФС между сигналами, принятыми антеннами 14 и 131, Φmi на рабочей частоте РНС Fm в соответствии с выражением (6). На следующем шаге алгоритма определяются значения курсового угла αi между продольной осью судна и направлением на i-ю НС согласно выражению (5). Затем используя известный курс судна Ψк определяются радиопеленги на НС согласно (7).
для точки 14. Затем происходит расчет разностей ФС между сигналами, принятыми антеннами 14 и 131, Φmi на рабочей частоте РНС Fm в соответствии с выражением (6). На следующем шаге алгоритма определяются значения курсового угла αi между продольной осью судна и направлением на i-ю НС согласно выражению (5). Затем используя известный курс судна Ψк определяются радиопеленги на НС согласно (7).
После определения значений ФС и радиопеленгов на принимаемые НС осуществляется расчет приближенных координат БС ( ,
,  ) согласно формуле (12), при этом значения матрицы коэффициентов А и столбца свободных членов С определяются из обозначений матричной системы уравнений (11).
) согласно формуле (12), при этом значения матрицы коэффициентов А и столбца свободных членов С определяются из обозначений матричной системы уравнений (11).
После определения приближенных координат БС осуществляется расчет приближенных расстояний между БС и i-й НС  в соответствии с выражением (13). При этом предельная погрешность полученного приближенного значения расстояния, как было отмечено выше, не должна превышать значения ±λ1/4.
в соответствии с выражением (13). При этом предельная погрешность полученного приближенного значения расстояния, как было отмечено выше, не должна превышать значения ±λ1/4.
Соблюдение этого условия приводит к безошибочному определению целочисленной неоднозначности N1i на метрической частоте F1 в соответствии с выражением (14), которое выполняется на следующем шаге алгоритма. Затем осуществляется вычисление полной фазы Ψ1i для сигнала i-й НС на частоте F1 согласно выражению (15).
Далее вычислительным блоком 81 выполняется цикл последовательного РН по метрическим частотам Fj (j=2, …, m) в соответствии с выражениями (16) и (17). По окончании данного цикла становится известной величина полного фазового сдвига Ψmi на рабочей частоте РНС Fm.
С использованием значения ФС Ψmi и введенной заранее скорости распространения сигналов с в вычислительном блоке 81 происходит определение точного расстояния между БС и i-й НС Ri. По окончании цикла обработки результатов измерений ФС для сигналов n НС происходит вычисление точных координат БС xb, yb по точным значениям расстояний R1÷Rn путем решения системы уравнений (19).
По окончании вычислений полученные значения точных координат БС xb, yb в прямоугольной системе Гаусса-Крюгера и расстояний БС - НС R1÷Rn выдаются для индикации потребителям в блок 12.
Длительность цикла работы вычислительного блока 81 выбирают таким образом, чтобы за время Тц успевали выполняться операции измерения ФС для всех НС, расчет грубых координат БС на основе радиопеленгов, а также разрешение неоднозначности, вычисление дальностей и координат БС.
Кроме того, вычислительный блок 81 может решать сервисные задачи, например осуществлять пересчет координат из прямоугольной системы координат в географические на заданном пользователем эллипсоиде, решать задачи маршрутной навигации судна и др.
Результаты решения сервисных и навигационных задач при необходимости поступают в блок индикации 12 для отображения оператору.
Блок-схема алгоритма работы вычислительного блока НС 82 при решении задачи приема и измерения параметров, а также излучения сигналов БС приведена на фиг.7.
На первом шаге алгоритма фиг.7 осуществляется ввод исходных данных, в частности метрических частот F1÷Fm и скорости распространения сигналов в атмосфере с.
После этого НС 2 осуществляет поиск сигналов БС 1 путем многократного накопления сигналов при заданных значениях задержки внутри рабочего цикла. Для различения сигналов БС и НС порядок излучения БС вспомогательных частот изменен на обратный, т.е. БС излучает сигналы вспомогательных частот в последовательности fm, fm-1, …, fj, …, f2, f1.
В случае успешного поиска сигналов БС НС 2 начинает синхронизацию временного формата приема сигналов БС путем сдвига времени включения управляющих сигналов коммутатора-формирователя НС 112 с заданным шагом.
При достижении заданной точности синхронизации каждая из НС 2 переходит в рабочий цикл измерения ФС сигналов БС и ретрансляции сигналов БС в интервалы Tpi, отведенные для сигналов НС 2i. Период повторения рабочего цикла алгоритма определяется длительностью рабочего цикла системы Тц.
На первом шаге рабочего цикла вычислительным блоком 82 осуществляется выдача в блок 102 кода подстройки частоты ОГ НС 102 в соответствии с измеренным ранее отклонением частоты ОГ НС по отношению к сигналу БС. Определение величины отклонения частоты ОГ, может быть, осуществляется на основе анализа значений ФС φ01, φ02, …, φ0m, φ′0m сигналов с частотой f0, принятых каждой из НС от БС. При этом обеспечивается подстройка частоты ОГ 102 под частоту ОГ 101 БС, что исключает погрешность измерения ФС, вызванную частотным рассогласованием сигналов БС и НС. Алгоритм определения отклонения частоты ОГ может быть реализован в соответствии с [7].
Затем НС осуществляет ожидание прихода сигналов БС.
Далее, во время приема сигналов БС осуществляется формирование управляющих сигналов для блоков синтезатора частоты 92 и коммутатора-формирователя 112 в соответствии с временной диаграммой для интервала времени излучения БС Ти, приведенной на фиг.3. При этом блоком фазового детектора 72 осуществляется измерение ФС сигналов БС, после чего вычислительным блоком 82 выполняется расчет значений ФС на метрических частотах F1÷Fm.
Затем осуществляется расчет отклонения частоты НС по отношению к БС на основе величины изменения измеренных ФС БС на интервале Тц между двумя соседними моментами приема сигналов БС. Данное значение запоминается вычислительным блоком 82 и используется для вычисления кода подстройки ОГ НС с целью сведения разности частот НС и БС к минимуму.
На следующем шаге алгоритма осуществляется ожидание времени начала ретрансляции сигналов Tpi, по наступлении которого НС 2i начинает излучение собственных сигналов, порядок вспомогательных частот которых является прямым, т.е. вспомогательные частоты излучаются в последовательности f1, f2, …, fj, …, fm-1, fm.
При этом вычислительный блок 82 осуществляет управление блоками синтезатора частоты 92 и коммутатора-формирователя 112 для излучения передатчиком 32 сигнала в соответствии с временной диаграммой фиг.3, г.
Помимо этого вычислительный блок 82 осуществляет управление фазовращателем 16, ФС которого при излучении сигналов вспомогательных частот f1÷fm устанавливается равным значению ФС БС, измеренных НС, а при излучении сигналов частоты f0 фазовращатель устанавливается в нулевое состояние.
Таким образом, в течение интервала времени Тр каждая из приемопередающих НС 2 излучает вспомогательные сигналы, фаза которых равна фазе принятых сигналов в течение интервалов Ти от блока БС 1, а также сигналы, фаза которых равна фазе опорного генератора 102.
Длительность цикла работы вычислительного блока 82 выбирают таким образом, чтобы за время Тц успевали выполняться операции измерения ФС БС во время Ти и ретрансляция сигналов БС во время излучения НС Tpi.
Вычислительные блоки 81 и 82 в связи с высокими требованиями к быстродействию, большим объемом вычислений и сложностью управляющих алгоритмов и программ необходимо реализовать, например, на основе современных быстродействующих универсальных микропроцессоров семейства Intel по типовой структуре, описанной, например, в [8, стр.48].
Рассмотрим числовой пример.
Пусть фазовая РНС вырабатывает сигналы с частотами f0=421 МГц (опорная частота) и вспомогательными частотами f1=421.01 МГц, f2=421.1 МГц, f3=422 МГц, f4=426 МГц, f5=431 МГц (выбраны рабочие частоты РНС УВЧ-диапазона «Крабик» [9]). Использование данных частот позволяет осуществлять определение фазовых сдвигов сигналов на метрических частотах, значения которых, определяемые в соответствии с выражением (4), образуют ряд: F1=10 кГц, F2=100 кГц, F3=1 МГц, F4=5 МГц, F5=10 МГц.
При этом диапазон однозначности отсчета расстояний между БС и НС составляет ±λ1/4 или ±7.5 км. При расстоянии В между антеннами 131 и 14, равном, например, 10 м, будет обеспечено однозначное определение разности фаз Φ5i для любой из принимаемых НС, поскольку значение длины волны λ5 частоты F5 составляет около 30 м и условие  выполняется.
выполняется.
Если принять погрешность измерения разности фаз ∆Φ5i одинаковой для всех НС и равной ∆Φ5=0.01 ф.ц. (3.6°), то погрешность определения курсового угла α определится из приближенного выражения:  рад ≈ 1.7° (в данном выражении значение ∆Φ5 выражено в ф.ц.).
рад ≈ 1.7° (в данном выражении значение ∆Φ5 выражено в ф.ц.).
Если принять погрешность определения азимута продольной оси судна ∆Ψк равной 1°, то суммарная погрешность определения радиопеленга с точки 131 БС на точку 132 НС определится как: 
Полученная погрешность измерения радиопеленга приведет к погрешности определения места точки 131 БС в направлении, перпендикулярном направлению БС-НС. Значение указанной погрешности ∆r определяется из соотношения: ∆r=R·tg(∆Ψa), где R - значение дальности БС-НС.
Если принять дальность БС-НС равной 100 км, что является предельной практически достижимой дальностью для РНС указанного частотного диапазона, то значение ∆r согласно вышеприведенной формуле составит около 3.5 км. При геометрическом факторе расстановки НС ГФ≤2 максимально возможная погрешность определения приближенных координат БС радиопеленгационным методом составит не более 7 км, что обеспечит однозначное определение целочисленной неоднозначности N1 для фазовой дорожки, заданной самой низкой метрической частотой F1=10 кГц, без необходимости привлечения информации от других датчиков навигационной информации.
Таким образом, благодаря новым элементам и связям достигается расширение зоны однозначного определения расстояния и автоматизация работы ФРНС за счет автономного РН фазовых измерений БС на основе определения приближенных координат БС радиопеленгационным методом. Для реализации данного метода определения приближенных координат БС используются данные о курсе судна, которые вводятся в вычислительный блок БС 81 в соответствии с показаниями гирокомпаса, входящего в состав бортового оборудования практически всех используемых в настоящее время судов. Поскольку большинство современных гирокомпасов позволяют обеспечить автоматическую выдачу курса в соответствии с протоколом обмена NMEA-0183 [10], то возможен автоматический ввод курса судна в вычислительный блок 81 с целью дальнейшей автоматизации работы предложенной ФРНС.
После определения начальных координат БС осуществляется переход к разрешению неоднозначности фазовых измерений, что позволяет определить точные расстояния между БС и НС, а также точные координаты БС с погрешностью в единицы метров и менее.
Литература
1. Пат. 2076333, Российская Федерация, МПК6 G01S 1/32. Дальномерная система с измерением фазы радиосигнала / В.И.Кокорин; заявитель и патентообладатель научно-производственное объединение «Сибцветметавтоматика». - №4786719/09; заявл. 26.01.90; опубл. 27.03.97, бюл. №9. - 5 с.
2. Пат. 2088948, Российская Федерация, МПК6 G01S 1/32. Фазовая радиогеодезическая система / В.И.Кокорин; заявитель и патентообладатель научно-производственное объединение «Сибцветметавтоматика». - №5009441/09; заявл. 05.08.91; опубл. 27.08.97, бюл. №24. - 6 с.
3. Волошин С.Б. Радионавигационные системы сверхдлинноволнового диапазона / С.Б.Волошин, Г.А.Семенов, А.С.Гузман; под ред. П.В.Олянюка, Г.В.Головушкина // М.: Радио и связь, 1985. - 264 с.: ил.
4. Куштин И.Ф. Геодезия. Учебно-практическое пособие / И.Ф.Куштин // М.: «Издательство ПРИОР», 2001. - 448 с.
5. Разрешение неоднозначности в информационно-измерительных многошкальных приборах и системах / В.А.Пономарев, А.В.Пономарев, Т.М.Пономарева и др. // Изд. ВИКУ. Санкт-Петербург, 2001.
6. Шебшаевич B.C. Сетевые спутниковые радионавигационные системы / B.C.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич; под ред. B.C.Шебшаевича. - М.: Радио и связь. 1993.
7. A.M.Алешечкин. Алгоритм автоматической подстройки частоты опорных генераторов радионавигационной системы «Крабик-БМ» // Современные проблемы радиоэлектроники: Сб. науч. тр. / Под ред. А.И.Громыко, А.В.Сарафанова; отв. за вып. В.И.Ризуненко. Красноярск: ИПЦ КГТУ, 2005. 732 с. С.100-103.
8. Микропроцессоры Intel: 8086/8088, 80186/80188, 80286, 80386, 80486, Pentium, Pentium Pro Processor, Pentium II, Pentium III, Pentium 4. Архитектура, программирование и интерфейсы. Шестое издание: Пер. с англ. - СПб.: БХВ-Петербург, 2005, 1328 с.: ил.
9. Алешечкин A.M. Вероятность правильного устранения неоднозначности в фазовой радионавигационной системе «Крабик» / A.M.Алешечкин // Гироскопия и навигация. - 2009. - №3. - С.74-82.
10. IEC 61162-1:2000, Maritime navigation and radiocommunication equipment and systems - Digital Interfaces - Part 1: Single talker and multiple listeners.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2582068C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ БОРТОВОЙ И НАЗЕМНОЙ ПРИЁМОПЕРЕДАЮЩИМИ СТАНЦИЯМИ | 2015 |
|
RU2587471C1 |
| ФАЗОВАЯ РАДИОГЕОДЕЗИЧЕСКАЯ СИСТЕМА | 1991 |
|
RU2088948C1 |
| ДАЛЬНОМЕРНАЯ СИСТЕМА С ИЗМЕРЕНИЕМ ФАЗЫ РАДИОСИГНАЛА | 1990 |
|
RU2076333C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1992 |
|
RU2042144C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗЫ РАДИОСИГНАЛА | 1991 |
|
RU2048677C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗЫ РАДИОСИГНАЛА | 1991 |
|
RU2048676C1 |
| МОНОИМПУЛЬСНАЯ РЛС МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2015 |
|
RU2600109C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
Изобретение относится к области измерительной техники и может быть использовано в радионавигации при создании наземных фазовых радионавигационных систем. Достигаемый технический результат - обеспечение разрешения фазовой неоднозначности во всей рабочей зоне. Устройство содержит не менее двух наземных и бортовую приемопередающие станции, каждая наземная приемопередающая станция содержит приемопередающую антенну, передатчик, приемник, антенный переключатель, усилитель-ограничитель, фазовый детектор, вычислительный блок, синтезатор частот, фазовращатель, опорный генератор, коммутатор-формирователь, бортовая приемопередающая станция содержит приемопередающую антенну, передатчик, два приемника, опорный генератор, индикатор, антенный переключатель, два фазовых детектора, вычислительный блок, синтезатор частот, два усилителя-ограничителя, коммутатор-формирователь. 7 ил.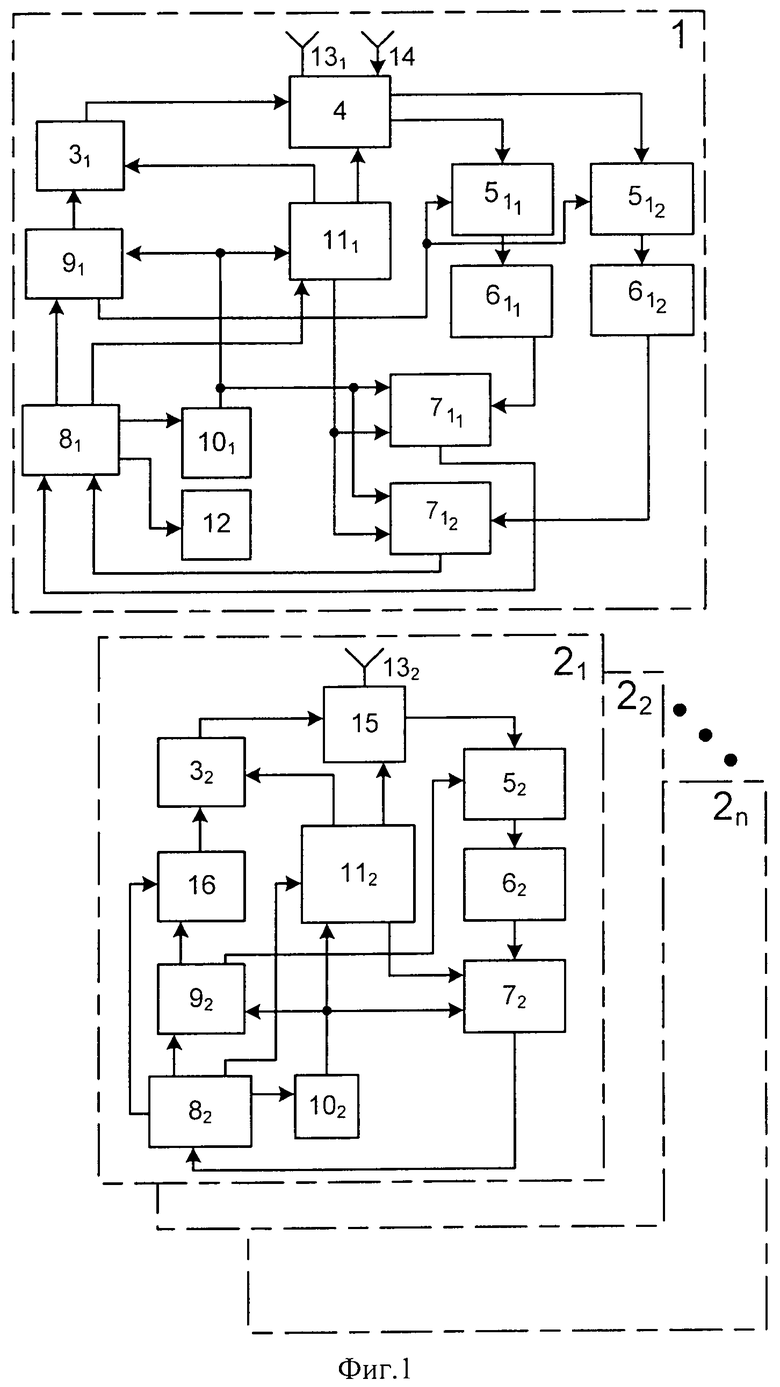
Фазовая радионавигационная система, содержащая не менее двух наземных и бортовую приемопередающие станции, в которой каждая наземная приемопередающая станция содержит приемопередающую антенну, передатчик и приемник, антенный переключатель, усилитель-ограничитель, фазовый детектор, вычислительный блок, синтезатор частот, фазовращатель, опорный генератор и коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и фазового детектора, выход которого соединен с входом вычислительного блока, выходы вычислительного блока соединены с управляющими входами синтезатора частот и фазовращателя, выход которого соединен с входом передатчика, выход опорного генератора соединен с первым входом фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом фазовращателя и вторым входом приемника, выход которого соединен через усилитель-ограничитель со вторым входом фазового детектора, бортовая приемопередающая станция содержит приемопередающую антенну, передатчик, первый приемник, опорный генератор, индикатор, антенный переключатель, первый фазовый детектор, вычислительный блок, синтезатор частот, первый усилитель-ограничитель, коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и первого фазового детектора, выход которого соединен с первым входом вычислительного блока, выходы вычислительного блока соединены с входом индикатора, с управляющими входами коммутатора-формирователя, синтезатора частот и опорного генератора, выход которого соединен с первым входом первого фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом первого приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом передатчика и вторым входом первого приемника, выход первого приемника соединен через первый усилитель-ограничитель со вторым входом первого фазового детектора, отличающаяся тем, что в бортовую приемопередающую станцию введены приемная антенна, второй приемник, второй усилитель-ограничитель и второй фазовый детектор, причем приемная антенна выходом соединена с третьим входом антенного переключателя, второй выход которого соединен с первым входом второго приемника, второй вход которого подключен к выходу синтезатора частот, а выход через второй усилитель-ограничитель подключен ко второму входу второго фазового детектора, управляющим входом соединенного с выходом коммутатора-формирователя, первый вход фазового детектора подключен к выходу опорного генератора, выход второго фазового детектора соединен со вторым входом вычислительного блока, а в каждой из наземных приемопередающих станций третий и четвертый выходы вычислительного блока подключены к управляющим входам опорного генератора и коммутатора-формирователя соответственно.
| ФАЗОВАЯ РАДИОГЕОДЕЗИЧЕСКАЯ СИСТЕМА | 1991 |
|
RU2088948C1 |
| СПОСОБ И УСТРОЙСТВО ВЫСОКОСКОРОСТНОЙ И НИЗКОСКОРОСТНОЙ СВЯЗИ ЧЕРЕЗ СПУТНИКИ НА НИЗКИХ И СРЕДНИХ ОРБИТАХ | 1997 |
|
RU2133555C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| Устройство для изолирования источника распыливаемой жидкости от высокого напряжения системы электростатического распыления при использовании электропроводной распыливаемой жидкости | 1988 |
|
SU1826928A3 |
| Устройство для определения параметров волн в водоемах и водотоках | 1988 |
|
SU1659708A1 |

