Изобретение относится к радиолокации и может быть использовано для повышения точности определения местоположения наземных источников радиоизлучений (ИРИ) в пассивных режимах работы радиолокационных станций (РЛС) или станций радиотехнической разведки (СРТР).
Основным источником информации о воздушной и наземной обстановке на самолетах различного, в том числе и военного назначения, являются бортовые радиолокационные (БРЛС), радионавигационные (РНС) и радиосвязные (РСС) системы.
Одновременно с развитием этих систем развиваются и средства радиоэлектронного подавления (РЭП), предназначенные для нарушения работы всех видов радиотехнических систем. В связи с этим системы радиоэлектронного подавления наземного базирования становятся для ударных самолетов приоритетными целями при ведении боевых действий, подлежащими первоочередному уничтожению. Однако для поражения этих целей необходимо знать их местоположение (координаты). Для решения этой задачи необходимо знать дальность до них и их бортовые пеленги, а также их производные. Следует отметить, что при подавленных дальномерных каналах бортовых РЛС возможно измерить лишь бортовые пеленги на источники радиоизлучений (ИРИ) в пассивном режиме работы самой РЛС или СРТР.
Кроме того, очень важный класс целей сами по себе представляют наземные системы радиосвязи, радионавигации, наведения и т.д., являющиеся источниками радиоизлучения и также подлежащие первоочередному уничтожению.
В связи с отмеченным весьма важной информационной задачей является определение местоположения ИРИ по угломерным данным. Эта задача может быть решена большим количеством способов, обзор которых приведен в [1].
Среди этих способов одним из самых употребляемых является триангуляционный способ, основанный на двукратной (многократной) пеленгации ИРИ через определенное время с измерением расстояния, пролетаемого самолетом за это время [2]. Суть этого способа, взятого за прототип, поясняет фиг.1. На этой фигуре показано положение пеленгующего самолета, находящегося в момент времени t1 в точке OC1 и движущегося со скоростью V под углом φ1 к ИРИ, измеряемым бортовым пеленгатором. Через некоторое время Δt=t2-t1, где t2 - момент нахождения самолета в точке OC2, проводится повторное измерение угла φ2 на ИРИ с измерением расстояния L=OC2OC1, которое выполняется известным способом либо путем счисления координат навигационными системами, либо в соответствии с соотношением
L=V(t2-t1).
Использование триангуляционного способа позволяет вычислить координаты наземного ИРИ по формулам [2]


Траектория полета пеленгующего самолета должна удовлетворять двум условиям.
Во-первых, нельзя допустить ситуации, когда φ2=φ1.
Во-вторых, для повышения точности пеленгации необходимо иметь значения пеленгов, существенно превышающие значения ошибок их измерения.
Однако необходимо отметить, что все существующие способы определения местоположения наземных ИРИ, используемые в однопозиционных системах, обладают низкой точностью и требуют длительного маневрирования самолета в горизонтальной или вертикальной плоскости [1].
Решить задачу кардинального повышения точности определения местоположения наземных ИРИ и уменьшения времени, затрачиваемого на получение приемлемых результатов в однопозиционных системах пеленгации, позволяет предлагаемый угломерно-корреляционный способ.
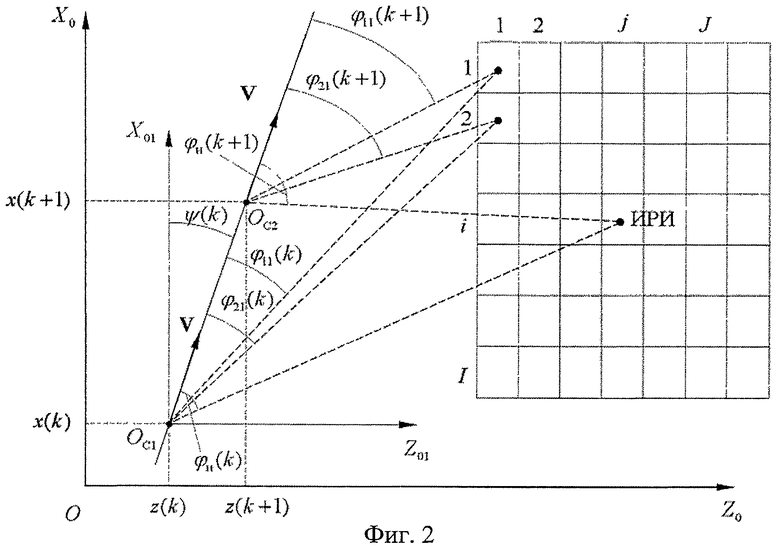
Суть угломерно-корреляционного способа оценивания координат ИРИ состоит в следующем. Летательный аппарат (ЛА), оснащенный БРЛС либо СРТР, совершает полет по заданной траектории. В моменты k приема сигналов ИРИ на летательном аппарате измеряются бортовой пеленг φи(k) цели, курс ψ(k) ЛА и его прямоугольные координаты x(k), z(k). Прием сигналов может происходить периодически либо эпизодически в зависимости от складывающейся тактической обстановки. Число k точек пеленгации на траектории ЛА должно быть таким, чтобы можно было получить оценки координат ИРИ с точностью не хуже заданной.
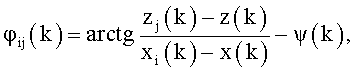
После набора определенного числа измерений φи(k)  пеленгов начинается процедура оценивания прямоугольных координат целей. Для этого участок местности вокруг грубо определенных координат xц, zц разбивается на I×J прямоугольников, размеры которых зависят от размеров анализируемого участка, требуемой точности определения местоположения ИРИ и возможностей вычислительной системы, установленной на ЛА (фиг.2). Каждому прямоугольнику ставятся в соответствие координаты xi, zj его центра. Затем для каждого прямоугольника и всех точек пеленгации рассчитываются ожидаемые значения бортовых пеленгов по формуле
пеленгов начинается процедура оценивания прямоугольных координат целей. Для этого участок местности вокруг грубо определенных координат xц, zц разбивается на I×J прямоугольников, размеры которых зависят от размеров анализируемого участка, требуемой точности определения местоположения ИРИ и возможностей вычислительной системы, установленной на ЛА (фиг.2). Каждому прямоугольнику ставятся в соответствие координаты xi, zj его центра. Затем для каждого прямоугольника и всех точек пеленгации рассчитываются ожидаемые значения бортовых пеленгов по формуле

где x(k), z(k) - координаты ЛА в k-й точке пеленгации ИРИ;
ψ(k) - курс ЛА в k-й точке пеленгации ИРИ.
После этого начинается поиск элементарного участка (возможного местоположения ИРИ), которому соответствует совокупность измеренных значений пеленгов. Степень близости расчетных и измеренных значений пеленгов может быть определена по величине взаимно-корреляционной функции реализаций φи(k) и φij(k). Экстремум этой функции будет свидетельствовать о совпадении текущего местоположения ИРИ с элементарным участком местности, координаты которого известны с высокой точностью.
Процедура поиска может выполняться различными способами. Самый простой из них - это поочередное сравнение текущей совокупности измеренных значений пеленгов φи(k) с расчетными φij(k), соответствующими всем элементарным участкам местности со сдвигом на один элемент по строкам и столбцам. Однако этот способ требует высокого быстродействия вычислительной системы. В противном случае на поиск затрачивается много времени.
Следует отметить, что в качестве функционала качества, характеризующего степень соответствия текущей совокупности пеленгов {φи(k)} и их расчетных {φij(k)} аналогов, могут быть использованы не только взаимно-корреляционная функция, но и существенно более простые в вычислительном отношении взвешенные суммы квадратов разностей текущих измеренных и расчетных значений. В таких случаях критерием совпадения текущей реализации пеленгов и их расчетных значений является минимум функционала

где K - количество точек пеленгации;
g(k) - весовой коэффициент.
Пример изменения значений Фij при его вычислении для различных значений xi, zj показан на фиг.3.
При достаточно малых размерах элементарных участков местности с центром xi≈xИРИ, zj≈zИРИ можно получить очень высокую точность.
В состав информационно-вычислительной системы (ИВС) самолета-пеленгатора, реализующей угломерно-корреляционный способ (3), (4), должны входить измерители (алгоритмы формирования оценок) бортового пеленга ИРИ, курса ЛА, а также навигационная система, с помощью которой измеряются прямоугольные координаты ЛА в той или иной системе координат.
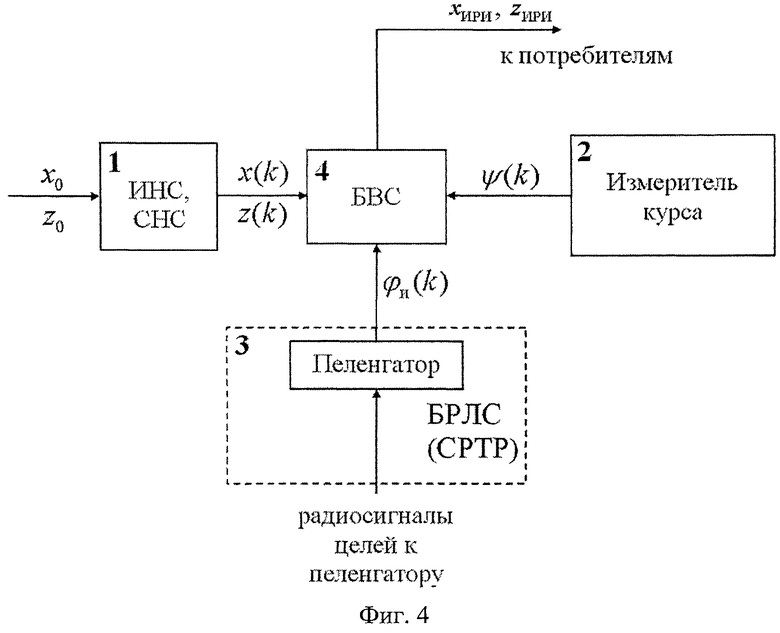
На фиг.4 представлена упрощенная структурная схема возможного варианта системы, реализующей описанный выше угломерно-корреляционный способ.
Система включает: инерциальную навигационную систему (ИНС) (спутниковую навигационную систему - СНС) 1; измеритель курса 2; бортовую радиолокационную систему (БРЛС) (станцию радиотехнической разведки - СРТР) 3; бортовую вычислительную систему (БВС) 4.
Технический результат, который может быть получен при осуществлении предлагаемого способа, заключается в реализации возможности высокоточного определении местоположения наземных источников радиоизлучения при значительно меньшем времени, затрачиваемом на получение приемлемых результатов.
Указанный технический результат достигается тем, что на борту самолета-пеленгатора одновременно измеряются собственные координаты местоположения x(k), z(k) с помощью ИНС (СНС), угол курса ψ(k) с помощью измерителя курса, пеленг цели φи(k) с помощью пеленгатора БРЛС (СРТР), в БВС осуществляется разбиение участка местности вокруг ИРИ с грубо определенными прямоугольными координатами xц, zц на прямоугольники с координатами центров xi, zi, для каждого прямоугольника и всех точек пеленгации рассчитываются ожидаемые значения пеленгов φij(k) по формуле (3), определяется экстремум взаимно-корреляционной функции реализации φи(k) и φij(k) или функционала качества Фij (4), что приводит к определению высокоточных координат xИРИ, zИРИ, которые затем поступают к потребителям.
Принципы построения БРЛС (СРТР) и навигационных систем (ИНС, СНС) самолета известны и подробно описаны в литературе [3, 4].
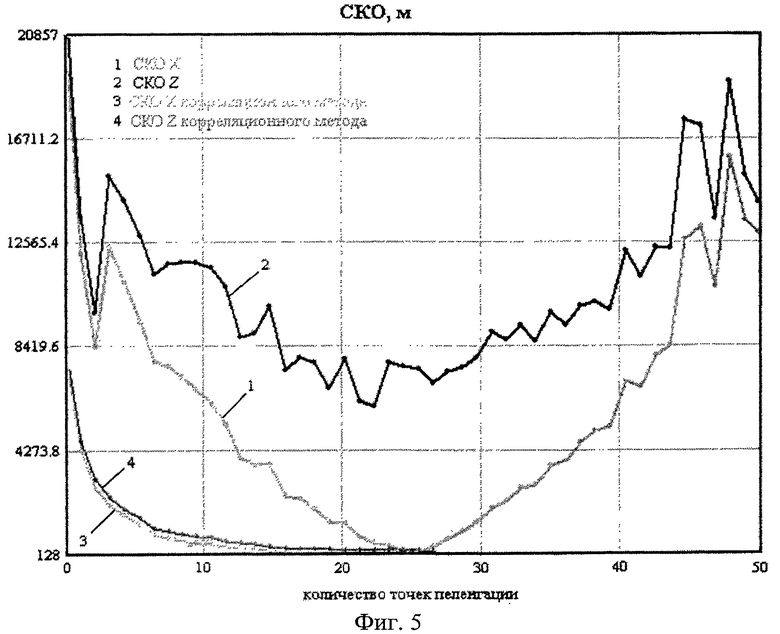
На фигурах 5 и 6 показаны зависимости среднеквадратических ошибок определения местоположения наземных ИРИ традиционным способом по формулам (1), (2) и предложенным угломерно-корреляционным способом, основанным на минимизации функционала (4) соответственно при размерах элементарной ячейки 500×500 м и 300×300 м при следующих условиях: количество ячеек - 11; интервал между измерениями пеленгов цели - 10 с; самолет-пеленгатор летит с постоянной скоростью VC=200 м/с; СКО ошибок пеленгатора σφ=0,2°; число реализаций - 100.
Из фигур 5 и 6 видно, что предлагаемый способ обеспечивает повышение точности определения местоположения до 10…100 раз. При этом время получения приемлемой точности сокращается в два-три раза. Следует отметить, что при уменьшении размеров элементарной ячейки точность определения местоположения ИРИ улучшается.
Реализация описанного выше способа позволит высокоточно оценивать координаты местоположения наземных источников радиоизлучения со значительно более высокой точностью и за существенно меньшее время по сравнению с другими существующими способами однопозиционной пеленгации.
ЛИТЕРАТУРА
1. Дрогалин В.В., Меркулов В.И., Чернов В.С. и др. Определение координат и параметров движения источников радиоизлучений по угломерным данным в однопозиционных бортовых радиолокационных системах. // Зарубежная радиоэлектроника. Успехи современной радиоэлектроники. - 2002. - №3.
2. Дрогалин В.В., Меркулов В.И., Чернов В.С. и др. Способы оценивания точности определения местоположения, источников радиоизлучений пассивной угломерной двухпозиционной бортовой радиолокационной системой. // Зарубежная радиоэлектроника. Успехи современной радиоэлектроники. - 2003. - №5.
3. Канащенков А.И., Меркулов В.И., Герасимов А.А. и др. Радиолокационные системы многофункциональных самолетов. T.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2006.
4. Меркулов В.И., Канащенков А.И., Чернов В.С., Дрогалин В.В. и др. Авиационные системы радиоуправления. Т.3. Системы командного радиоуправления. Автономные и комбинированные системы наведения. / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2004.



Изобретение может быть использовано при определении местоположения наземных источников радиоизлучений (ИРИ). Заявленный способ заключается в том, что на борту самолета-пеленгатора одновременно измеряют собственные координаты местоположения x(k), z(k) с помощью инерциальной навигационной системы (ИНС), угол курса ψ(k), пеленг ИРИ φи(k), в бортовой вычислительной системе (БВС) осуществляют разбиение участка местности вокруг ИРИ с грубо определенными прямоугольными координатами xц, zц на прямоугольники с координатами центров xi, zi, для каждого прямоугольника и всех точек пеленгации рассчитывают ожидаемые значения пеленгов φ(k) по формуле  где x(k), z(k) - координаты самолета-пеленгатора в k-й точке пеленгации ИРИ, xi(k), zi(k) - координаты центра прямоугольника разбиения, ψ(k) - курс самолета-пеленгатора в k-й точке пеленгации ИРИ, определяют экстремум взаимно-корреляционной функции реализации φи(k) и φij(k) или функционала качества
где x(k), z(k) - координаты самолета-пеленгатора в k-й точке пеленгации ИРИ, xi(k), zi(k) - координаты центра прямоугольника разбиения, ψ(k) - курс самолета-пеленгатора в k-й точке пеленгации ИРИ, определяют экстремум взаимно-корреляционной функции реализации φи(k) и φij(k) или функционала качества  где К - количество точек пеленгации, g(k) - весовой коэффициент, φи(k) - измерение пеленга ИРИ, φij(k) - расчетное значение пеленга, определяют координаты ИРИ, которые затем поступают к потребителям. Достигаемый технический результат - повышение точности определения местоположения наземных ИРИ и уменьшение времени, затрачиваемого на получение приемлемых результатов в однопозиционных системах пеленгации. 6 ил.
где К - количество точек пеленгации, g(k) - весовой коэффициент, φи(k) - измерение пеленга ИРИ, φij(k) - расчетное значение пеленга, определяют координаты ИРИ, которые затем поступают к потребителям. Достигаемый технический результат - повышение точности определения местоположения наземных ИРИ и уменьшение времени, затрачиваемого на получение приемлемых результатов в однопозиционных системах пеленгации. 6 ил.
Угломерно-корреляционный способ оценивания координат местоположения наземных источников радиоизлучения (ИРИ), заключающийся в том, что на борту самолета-пеленгатора одновременно измеряют собственные координаты местоположения x(k), угол курса ψ(k), пеленг ИРИ(φи(k)), отличающийся тем, что бортовая вычислительная система (БВС) осуществляет разбиение участка местности вокруг ИРИ с грубо определенными прямоугольными координатами xц, zц на I×J прямоугольников с координатами центров хi, zi; для каждого прямоугольника и всех точек пеленгации рассчитывают ожидаемые значения пеленгов φij(k) по формуле
где x(k), z(k) - координаты самолета-пеленгатора в k-й точке пеленгации ИРИ,
xi(k), zj(k) - координаты центра прямоугольника разбиения,
ψ(k) - курс самолета-пеленгатора в k-й точке пеленгации ИРИ;
затем осуществляют поиск элементарного участка местности возможного местоположения ИРИ, которому соответствует совокупность измеренных значений пеленгов φи(k), определяют текущее местоположение ИРИ по величине функционала качества, характеризующего степень соответствия текущей измеренной совокупности пеленгов {φи(k)} и их ожидаемых расчетных значений {φij(k)}, соответствующих элементарным участкам местности, координаты которых известны, при этом в качестве функционала качества используется экстремум взаимно-корреляционной функции реализации φи(k) и φij(k), определяющий совпадение текущего местоположения ИРИ с измеренным элементарным участком местности, координаты которого известны, или взвешенные суммы квадратов разностей текущих измеренных и расчетных значений пеленгов φи(k) и φij(k), при этом критерием совпадения текущей реализации пеленгов и их расчетных значений является минимум функционала качества

где K - количество точек пеленгации,
g(k) - весовой коэффициент,
φи(k) - измерение пеленга ИРИ,
φij(k) - расчетное значение пеленга,
затем определяемые координаты ИРИ поступают к потребителю.
| ДРОГАЛИН В.В | |||
| и др | |||
| Способы оценивания точности определения местоположения источников радиоизлучений пассивной угломерной двухпозиционной бортовой радиолокационной системой// Зарубежная радиоэлектроника | |||
| Успехи современной радиоэлектроники | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ (ВАРИАНТЫ) И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2298805C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ В РЕЖИМЕ ОБЗОРА | 2001 |
|
RU2207589C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217773C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |

