Уровень техники
Настоящее изобретение относится к области навигации и определения местоположения устройства, такого как устройство связи или подобное и, в частности, к способу и устройству для трилатерации с использованием прогнозирования линий связи в пределах прямой видимости (LOS) и фильтрации трасс в пределах прямой видимости до проведения измерений для оценки или прогнозирования местоположения устройства или приемника.
Радионавигационные методы, основанные на трилатерации, предполагают, что первый сигнал, чтобы поступить в приемник, проходит по прямой трассе в пределах прямой видимости (LOS) от передатчика или передающего устройства к приемнику или принимающему устройству. Навигационная система может ошибочно принять сигнал, поступающий по трассе не в пределах прямой видимости (NLOS), за сигнал LOS, если сигнал LOS ослаблен какими-либо ослабляющими объектами до такой степени, что не регистрируется в приемнике. Поскольку длина трассы сигнала NLOS больше длины трассы LOS, то оценка дальности, полученная в результате измерений NLOS, будет определена с ошибкой в сторону увеличения. Совокупный эффект от применения множества сигналов NLOS при проведении оценки дальности также создает положительное смещение, поскольку все измерения дальности от сигналов NLOS дают более высокие значения, чем измерения дальности от сигналов LOS. В существующих способах и устройствах изначально предполагается, что все сигналы LOS регистрируемы, и измерение дальности основано на этом предположении. В существующих способах и устройствах делается попытка отфильтровать сигналы NLOS после проведения измерений, но такая фильтрация после измерений может привести к повышенной вероятности ошибки, поскольку ошибки определения дальности из-за NLOS уже были введены в оценку положения, а также из-за недостатка информации об эффективности трасс и неиспользования такой информации в процессе фильтрации.
Сущность изобретения
В соответствии с вариантом выполнения настоящего изобретения способ для трилатерации может включать в себя прием сигнала по множеству трасс LOS и прогнозирование эффективности каждой трассы LOS. Способ может также включать в себя фильтрацию сигналов, принятых по трассам LOS с эффективностью ниже заданного порогового значения. Способ может также включать в себя выполнение трилатерации с использованием неотфильтрованных сигналов для определения по существу положения устройства.
В соответствии с другим вариантом выполнения настоящего способ трилатерации может включать в себя прогнозирование эффективности радиолинии для каждой радиолинии между приемником и каждым из множества передатчиков. Способ может также включать в себя выбор радиолиний для измерений дальности, которые имеют наилучшую спрогнозированную эффективность относительно других радиолиний. Способ может далее включать в себя определение местоположения приемника с использованием выбранных радиолиний для измерений дальности.
В соответствии с еще одним вариантом выполнения настоящего изобретения устройство для трилатерации может включать в себя приемник для приема сигнала от каждого из множества передатчиков по соответствующей радиотрассе. Устройство может также включать в себя модуль для прогнозирования эффективности каждой радиотрассы. Может быть предусмотрено устройство фильтрации для фильтрации сигналов, принятых по радиотрассам, эффективность которых ниже заданного порогового значения. Устройство может дополнительно включать в себя модуль для определения местоположения приемника с использованием неотфильтрованных сигналов. Может иметься выходное устройство для представления местоположения приемника или устройства, связанного с приемником.
В соответствии с еще одним вариантом выполнения настоящего изобретения устройство для трилатерации может включать в себя средство для прогнозирования эффективности радиолинии для каждой радиолинии между приемником и каждым из множества передатчиков. Может быть предусмотрено средство для выбора радиолиний для измерений дальности, которые имеют лучшую спрогнозированную эффективность относительно других радиолиний. Устройство может также включать в себя средство для определения местоположения приемника с использованием выбранных радиолиний для измерений дальности.
В соответствии с еще одним вариантом выполнения настоящего изобретения компьютерный программный продукт для трилатерации может включать в себя используемый компьютером носитель, содержащий реализованный на нем используемый компьютером программный код. Используемый компьютером носитель может включать в себя используемый компьютером программный код, выполненный с возможностью прогнозировать эффективность радиолинии для каждой радиолинии между приемником и каждым из множества передатчиков. Используемый компьютером носитель может также включать в себя используемый компьютером программный код, выполненный с возможностью выбора радиолиний для измерений дальности, которые обладают лучшей спрогнозированной эффективностью относительно других радиолиний. Используемый компьютером носитель может также включать в себя используемый компьютером программный код, выполненный с возможностью определения местоположения приемника с использованием выбранных радиолиний для измерений дальности.
В соответствии с еще одним вариантом выполнения настоящего изобретения транспортное средство может включать в себя устройство для определения местоположения транспортного средства. Устройство может включать в себя средство для прогнозирования эффективности радиолинии для каждой радиолинии между приемником и каждым из множества передатчиков и средство для выбора радиолиний для измерений дальности, которые обладают лучшей спрогнозированной эффективностью относительно других радиолиний. Устройство может дополнительно включать в себя средство определения местоположения транспортного средства с использованием выбранных радиолиний для измерений дальности.
Другие аспекты и признаки настоящего изобретения, определяемого исключительно формулой, станут очевидны специалистам в данной области техники после ознакомления с нижеследующим неограничивающим подробным описанием изобретения в сочетании с сопроводительными чертежами.
Краткое описание некоторых видов чертежей
Фиг.1 - пример определения местоположения устройства или приемника с использованием трилатерации.
Фиг.2 - блок-схема последовательности операций в примере способа трилатерации с использованием прогнозирования эффективности линий LOS и фильтрации трасс LOS до проведения измерения в соответствии с вариантом выполнения настоящего изобретения.
Фиг.3 - иллюстрация примера определения местоположения устройства или приемника с использованием трилатерации и прогнозирования эффективности линий LOS и фильтрации трасс LOS до проведения измерения в соответствии с вариантом выполнения настоящего изобретения.
Фиг.4А и 4В (совместно фиг.4) - блок-схема последовательности операций в примере способа прогнозирования эффективности линии или трассы LOS в соответствии с вариантом выполнения настоящего изобретения.
Фиг.5 - блок-схема последовательности операций в примере способа фильтрации трасс LOS до проведения измерений для фильтрации низкоэффективных линий LOS до измерений времени поступления сигналов в соответствии с вариантом выполнения настоящего изобретения.
Фиг.6 - блок-схема примера устройства, выполненного с возможностью определения местоположения с использованием трилатерации и прогнозирования эффективности линий LOS и фильтрации трасс LOS до проведения измерений в соответствии с вариантом выполнения настоящего изобретения.
Подробное описание изобретения
Нижеприведенное подробное описание вариантов выполнения содержит ссылки на прилагаемые чертежи, которые иллюстрируют частные варианты выполнения настоящего изобретения. Другие варианты выполнения, имеющие иную конструкцию и действия, не выходят за рамки объема настоящего изобретения.
Как должно быть понятно специалисту в данной области техники, настоящее изобретение может быть реализовано в виде способа, системы или компьютерного программного продукта. Соответственно настоящее изобретение может принимать форму полностью аппаратного варианта выполнения, полностью программного варианта выполнения (в том числе на встроенных программах, резидентных программах, микрокоде и т.д.) или варианта выполнения, сочетающего программные и аппаратные аспекты, которые в целом называются в настоящей заявке "схема", "модуль" или "система". Кроме того, настоящее изобретение может принимать форму компьютерного программного продукта на используемом компьютером носителе данных, содержащего используемый компьютером программный код, реализованный на носителе.
Можно использовать любой подходящий используемый компьютером или машиночитаемый носитель. Например, используемым компьютером или машиночитаемым носителем может быть, в частности, электронная, магнитная оптическая, электромагнитная, инфракрасная или полупроводниковая система, устройство или среда распространения. Более частные примеры (список неисчерпывающий) машиночитаемой среды могут включать в себя следующее: электрическое соединение, имеющее один или несколько проводов; портативную компьютерную дискету, жесткий диск, оперативную память (RAM), постоянную память (ROM), стираемую программируемую постоянную память (EPROM или flash-память), оптическое волокно, постоянную память на портативном компакт-диске (CD-ROM), оптическое устройство для хранения данных, передающую среду наподобие тех, которые поддерживают Интернет или интрасеть, или магнитное устройство для хранения данных. Заметим, что используемая компьютером или машиночитаемая среда может быть даже бумагой или другим подходящим носителем, на котором напечатана программа, поскольку такую программу можно снять электронным образом, например, при помощи оптического сканирования бумаги или другого носителя, после чего ее, при необходимости, можно скомпилировать, интерпретировать или иным образом обработать подходящим образом, а затем сохранить в памяти компьютера. В контексте настоящего документа используемая компьютером или машиночитаемая среда может быть любой средой, которая может содержать, хранить, передавать, распространять или переносить программу, предназначенную для использования или в связи с системой или устройством для исполнения команд.
Компьютерный программный код для выполнения операций настоящего изобретения может быть написан на объектно-ориентированном языке программирования, таком как Java, Smalltalk, C++ или тому подобном. Однако компьютерный программный код для выполнения операций настоящего изобретения может также быть написан на обычных процедурных языках программирования, таких как язык программирования "С" или подобные языки программирования. Программный код может полностью выполняться на компьютере пользователя, частично выполняться на компьютере пользователя, выполняться в виде автономного пакета программ, частично выполняться на компьютере пользователя и частично на удаленном компьютере или полностью выполняться на удаленном компьютере или сервере. В последнем варианте удаленный компьютер может быть соединен с компьютером пользователя по локальной сети (LAN) или глобальной сети (WAN), или соединение может быть установлено с внешним компьютером (например, через Интернет при помощи провайдера интернет-услуг).
Настоящее изобретение описано ниже со ссылкой на блок-схемы последовательностей операций и (или) блок-схемы для способов, устройств (систем) и компьютерных программных продуктов согласно вариантам выполнения изобретения. Должно быть понятно, что каждый блок на блок-схемах последовательностей операций и (или) блок-схемах, а также комбинации блоков на блок-схемах последовательности операций и (или) блок-схемах могут быть реализованы посредством команд компьютерной программы. Эти команды компьютерной программы могут быть поданы на процессор компьютера общего назначения, специализированного компьютера или другого программируемого устройства обработки данных для создания такой машины, чтобы команды, которые выполняются посредством процессора в компьютере или иного программируемого устройства обработки данных, создавали средство для реализации функций/действий, указанных в блоке или блоках блок-схемы последовательности операций и (или) блок-схеме.
Эти команды компьютерной программы могут также храниться в машиночитаемой памяти, которая может указывать компьютеру или другому программируемому устройству функционировать определенным образом, так чтобы команды, хранящиеся в машиночитаемой памяти, создавали изделие, включающее в себя командное средство, которое выполняет функцию/действие, указанное в блоке или блоках блок-схемы последовательности операций и (или) блок-схемы.
Команды компьютерной программы могут быть также загружены в компьютер или другое программируемое устройство обработки данных для обеспечения последовательности функциональных этапов, которые должен выполнить компьютер или другое программируемое устройство для создания реализуемого на компьютере процесса, так чтобы команды, которые исполняет компьютер или другое программируемое устройство, обеспечивали этапы для реализации функций/действий, указанных в блоке или блоках блок-схемы последовательности операций и (или) блок-схемы.
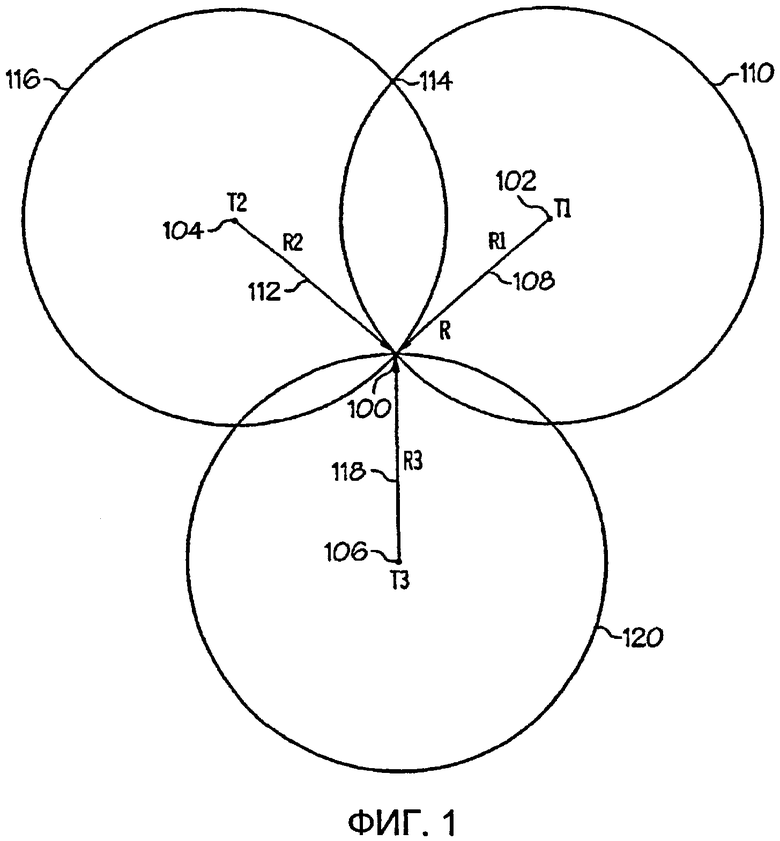
На фиг.1 приведен пример определения местоположения устройства или приемника 100 с использованием трилатерации. Трилатерация - это метод определения относительного положения объектов, таких как устройства связи, объекты, рассеивающие радиочастоты (RF) или волны, объекты, ослабляющие RF или другие объекты или устройства, с использованием геометрии треугольников аналогично триангуляции. В отличие от триангуляции, в которой используются измерения углом (вместе по меньшей мере с одним известным расстоянием), в трилатерации для вычисления местоположения объектов используется известное местоположение двух или более опорных точек или объектов и измеренное расстояние между объектом или устройством, для которого определяется местоположение, и каждой опорной точкой или объектом. Для точного и однозначного определения относительно местоположения точки или объекта на двумерной плоскости только с использованием трилатерации требуется, как правило, по меньшей мере, три опорные точки.
В примере на фиг.1 требуется определить местоположение приемника 100 относительно передатчиков Т1 102, Т2 104 и Т3 106. Измерение дальности R1 108 для Т1 102 ограничивает возможное местоположение R 100 окружностью 110 с центром в Т1 102. Измерение дальности R2 112 для Т2 102 ограничивает возможное местоположение R 100 двумя возможными точками R100 и точкой 114, соответствующей пересечению окружности 110 и окружности 116 с центром в Т2 104. Измерение дальности R3 118 для Т3 106 дает точное местоположение приемника R 100 как пересечение окружностей 110, 116 и 120 с передатчиком Т3 106 в центре. Для снижения вероятности ошибок можно измерить четвертую опорную точку.
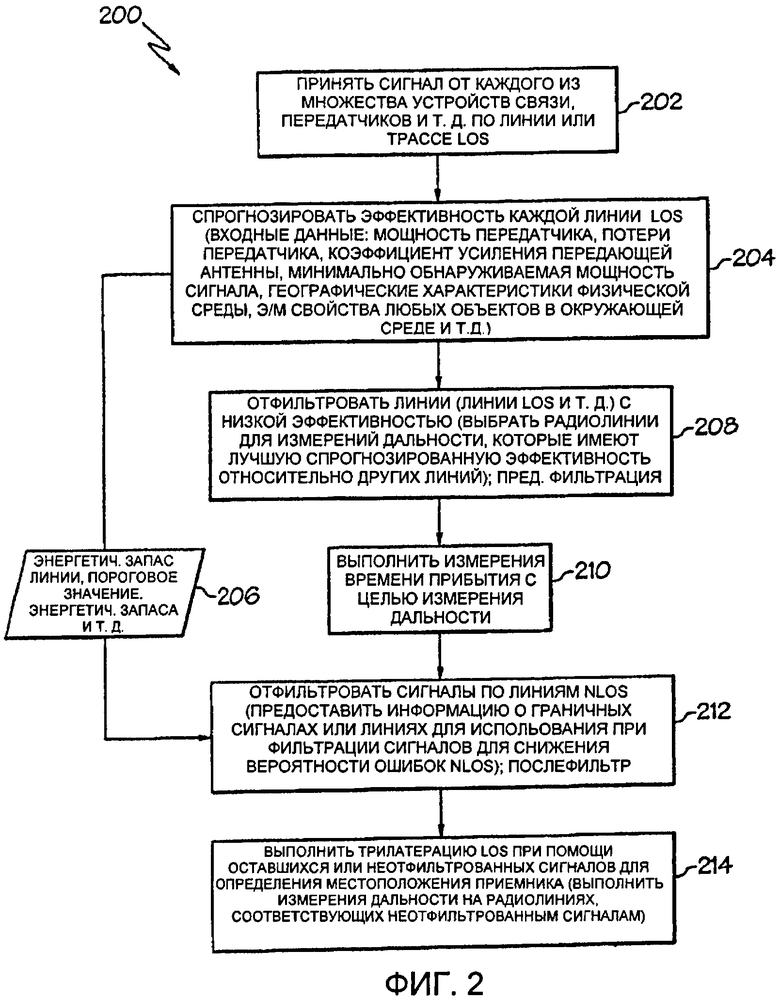
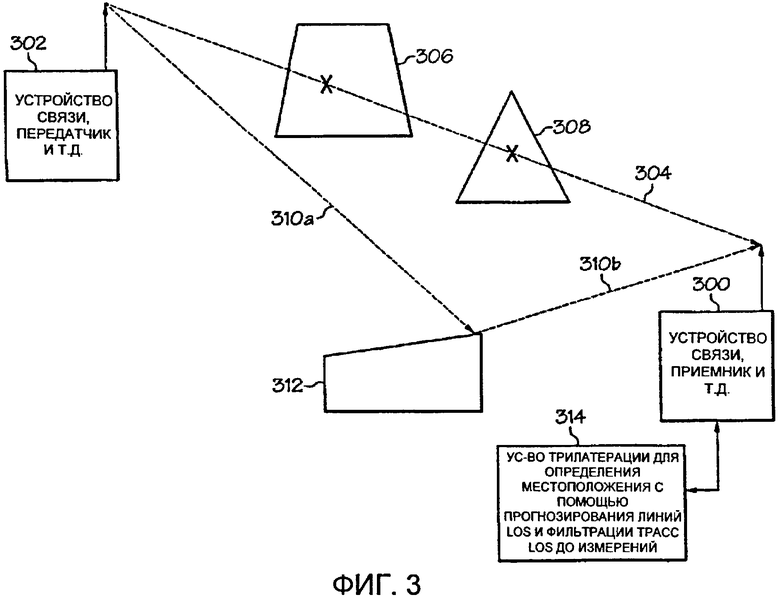
На фиг.2 приведена блок-схема последовательности операций для примера способа 200 трилатерации с использованием прогнозирования эффективности линий LOS и фильтрации трасс LOS до проведения измерений в соответствии с вариантом выполнения настоящего изобретения. В блоке или модуле 202 от каждого из множества устройств связи может быть принят сигнал. Каждое устройство связи может быть передатчиком, передатчиком, связанным с устройством, чье местоположение определяется, или любым устройством, способным передавать сигнал. Сигналы могут быть получены по линии или трассе в пределах прямой видимости (LOS). Обратимся также к фиг.3. Фиг.3 - это иллюстрация примера определения местоположения устройства 300 или приемника с использованием трилатерации и прогнозирования эффективности линий LOS и фильтрации трасс LOS в соответствии с вариантом выполнения настоящего изобретения. Устройство 300 может быть транспортным средством, включающим в себя устройство связи, приемник или подобное устройство. Транспортное средство может быть наземным транспортным средством, аэрокосмическим транспортным средством или водным транспортным средством. Устройство 302, устройство связи или передатчик или подобное устройство может передавать сигнал по линии или трассе 304 LOS. Транспортное средство может быть наземным транспортным средством, аэрокосмическим транспортным средством или водным транспортным средством. Устройство 302 также может быть транспортным средством, включающим в себя устройство связи, передатчик или подобное устройство. Трасса 304 LOS может включать в себя ослабляющие объекты, такие как объекты 306 и 308, которые могут влиять на эффективность линии или трассы 304 LOS. Ослабляющим объектом может быть любой объект, который может находиться на трассе или линии передачи и может оказаться на пути RF-сигнала, передаваемого по этой трассе или линии, и который может вызвать ослабление или потерю мощности сигнала или каким-либо иным образом повлиять на эффективность передачи по этой линии или трассе. Устройство 300 может также принимать сигналы по линии или трассе 310 вне пределов прямой видимости (NLOS). Сигнал может рассеиваться или отражаться рассеивающим объектом 312, который может также быть ослабляющим объектом.
В блоке или модуле 204 может осуществляться прогнозирование эффективности каждой трассы LOS. Результатом или выходом из блока или модуля 204 может быть энергетический запас 206 линии, вероятность обнаружения или другая мера эффективности, либо эффективность передачи. Пример способа 400 прогнозирования эффективности трассы LOS более подробно описывается со ссылкой на фиг.4. Входные данные для прогнозирования эффективности трассы LOS в блоке 204 могут включать в себя мощность передатчика, потери в передатчике, коэффициент усиления передающей антенны, коэффициент усиления приемной антенны, потери в приемнике, минимальную регистрируемую мощность сигнала, географические характеристики физической окружающей среды вокруг передатчиков и приемника или устройства, местоположение которого определяется, электромагнитные свойства любых объектов, таких как ослабляющие объекты в окружающей среде, или другие параметры, которые могут повлиять на передачу сигналов LOS.
В блоке или модуле 208 может осуществляться фильтрация низкоэффективных линий или сигналов LOS. Радиолинии или сигналы LOS, обладающие наибольшей эффективностью относительно других линий или сигналов LOS, могут быть выбраны для измерений дальности. Блок или модуль 208 могут определить предварительный фильтр для фильтрации низкоэффективных линий или сигналов LOS и (или) связанных с ними передатчиков, для которых параметр эффективности, такой как энергетический запас, вероятность обнаружения или иной параметр эффективности, до выполнения измерений времени прибытия или измерений дальности. Пример способа 500 фильтрации линий, который может применяться в отношении блока или модуля 206, более подробно описан со ссылкой на фиг.5.
В блоке или модуле 210 можно измерить время прибытия сигналов от передатчиков или устройств связи с целью выполнения или определения измерений дальности.
В блоке или модуле 212 может осуществляться фильтрация сигналов, поступающих по линии NLOS. Для уменьшения вероятности ошибок NLOS может быть предоставлена информация о граничных сигналах или линиях, которая используется при фильтрации сигналов. Например, на блок или модуль 212 может быть подана информация 206 об энергетическом запасе линии, пороговом значении энергетического запаса линии, вероятности обнаружения или иная информация об эффективности линии с целью фильтрации других сигналов, таких как сигналы NLOS. Блок или модуль 212 могут определить послефильтр для фильтрации других сигналов или линий после выполнения измерений времени прибытия или дальности.
В блоке 214 может быть выполнена трилатерация LOS с использованием оставшихся или неотфильтрованных сигналов или трасс, чтобы по существу определить или оценить местоположение приемника. Измерения дальности могут выполняться на радиолиниях, соответствующих неотфильтрованным сигналам. Соответственно, местоположение устройства или приемника может быть по существу определено или оценено посредством прогнозирования эффективности каждой линии или сигнала LOS (прогнозирование линии LOS) в блоке 204; а фильтрация линий или сигналов с низкой эффективностью (фильтрация до проведения измерений) в блоке 208 перед измерениями времени прибытия и дальности в блоке 210. Вариант выполнения настоящего изобретения, приведенного на фиг.2, может также включать в себя фильтрацию сигналов в блоке 212 после измерений времени прибытий или измерений дальности (фильтрация после проведения измерений). Фильтрация после проведения измерений может также включать в себя использование информации 206 о граничных сигналах или линиях для повышения точности и для снижения вероятности ошибок, таких как использование сигнала NLOS для измерений дальности LOS или другие ошибки.
Устройство 314 трилатерации может быть связано с устройством 300 или может быть встроено в устройство 300 или приемник. Способ 200 может реализовываться или выполняться устройством 314 трилатерации. Соответственно устройство 314 трилатерации может использоваться для определения местоположения устройства 300 с использованием прогнозирования линий связи LOS, фильтрации трасс LOS до проведения измерений и фильтрации после проведения измерений с использованием информации о спрогнозированной эффективности.
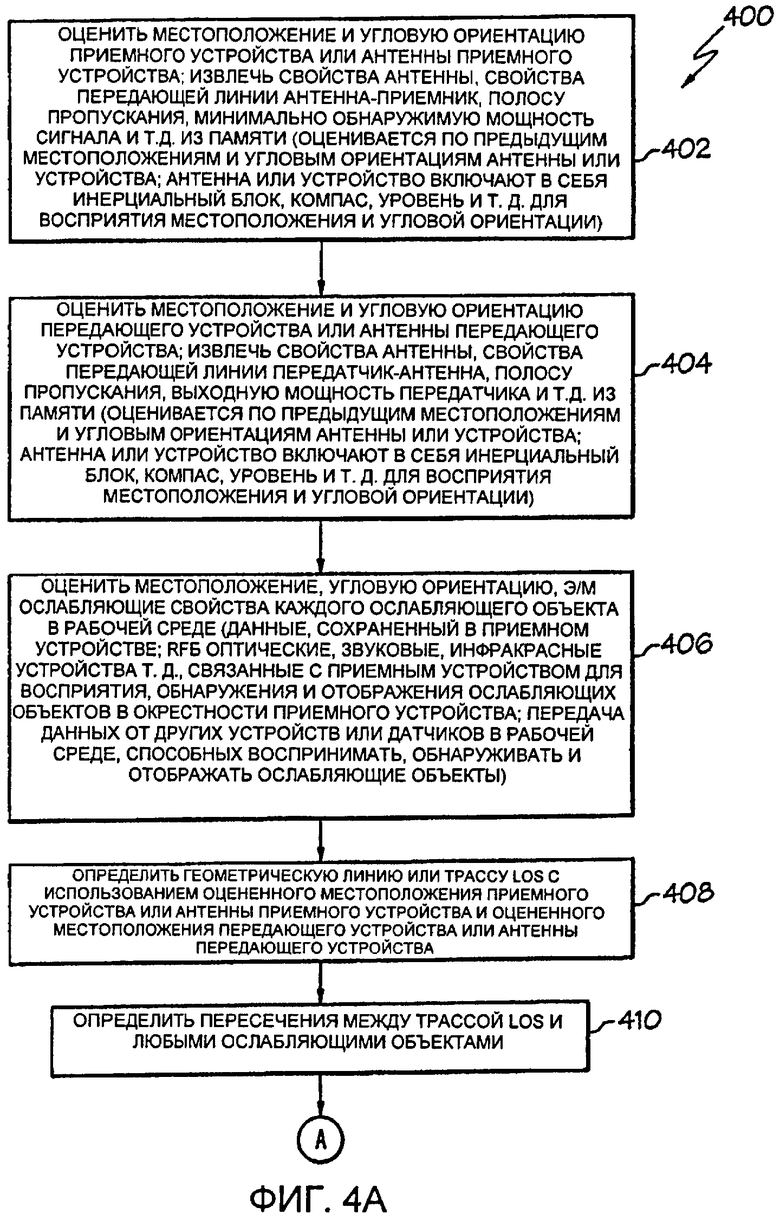
На фиг.4А и 4В (совместно фиг.4) приведена блок-схема последовательности операций для примера способа 400 прогнозирования эффективности для линии или трассы LOS в соответствии с вариантом выполнения настоящего изобретения. Способ 400 может применяться для блока или модуля 204 в способе 200 на фиг.2. В блоке или модуле 402 могут оцениваться местоположение и угловая ориентация приемного устройства или антенны приемного устройства. Оценка местоположения и угловой ориентации приемной антенны может включать в себя извлечение набора параметров из памяти устройства или какого-либо иного источника данных, которые могут использоваться при определении местоположения или угловой ориентации приемного устройства или антенны приемного устройства. Набор параметров может включать в себя свойства антенны, свойства линии передачи антенна-приемник, полосу пропускания сигнала, минимально обнаруживаемую мощность сигнала или другие параметры.
Местоположение и угловую ориентацию можно оценить из предыдущих местоположений и угловых ориентаций антенны или устройства. Антенный блок или устройство могут также включать в себя инерциальный блок, компас, уровень или аналогичное устройство для восприятия местоположения или угловой ориентации.
В блоке или модуле 404 можно оценить местоположение или угловую ориентацию передающего устройства или антенны передающего устройства. Оценка местоположения и угловой ориентации передающего устройства или антенны передающего устройства может включать в себя извлечение набора параметров из памяти устройства или другого источника данных. Набор параметров может включать в себя свойства антенны, свойства линии передачи передатчик-антенна, полосу пропускания сигнала, выходную мощность передатчика или другие параметры.
Местоположение и угловую ориентацию передающего устройства или антенны передающего устройства можно оценить из предыдущих местоположений или угловых ориентаций устройства или антенны. Передающее устройство может также включать в себя устройство для восприятия местоположения или угловой ориентации, такой как инерциальный блок, компас, уровень или подобное средство.
В блоке или модуле 406 могут оцениваться характеристики или свойства любых ослабляющих объектов, которые находятся в рабочей среде или которые могут находиться на пути передачи между передатчиком и приемником. Характеристики или свойства могут включать в себя местоположение, угловую ориентацию, физические размеры, электромагнитные (ЭМ) ослабляющие свойства или другие характеристики, свойства или параметры. Данные, относящиеся к любым ослабляющим объектам, могут храниться в приемном устройстве. Данные могут определяться по результатам исследования рабочей среды.
Приемное устройство может также включать в себя устройство для восприятия, обнаружения или отображения объектов в рабочей среде. Примеры такого устройства могут включать в себя RF-устройства, оптические устройства (камеры, и т.д.), звуковые устройства, инфракрасные устройства или подобные устройства. Устройства могут передавать радио-, оптические, звуковые или инфракрасные сигналы и обнаруживать обратные сигналы от любого ослабляющего объекта, который находится в рабочей среде или который может находиться на пути трассы или линии передачи.
Принимающее устройство может также принимать информацию или данные от других устройств или датчиков в рабочей среде, способных воспринимать, обнаруживать или отображать ослабляющие объекты.
В блоке или модуле 408 может быть определена геометрическая линия или трасса LOS с использованием оценки местоположения и угловой ориентации приемного устройства или антенны приемного устройства и передающего устройства или антенны передающего устройства. В блоке или модуле 410 можно определить пересечения трассы LOS и ослабляющих объектов.
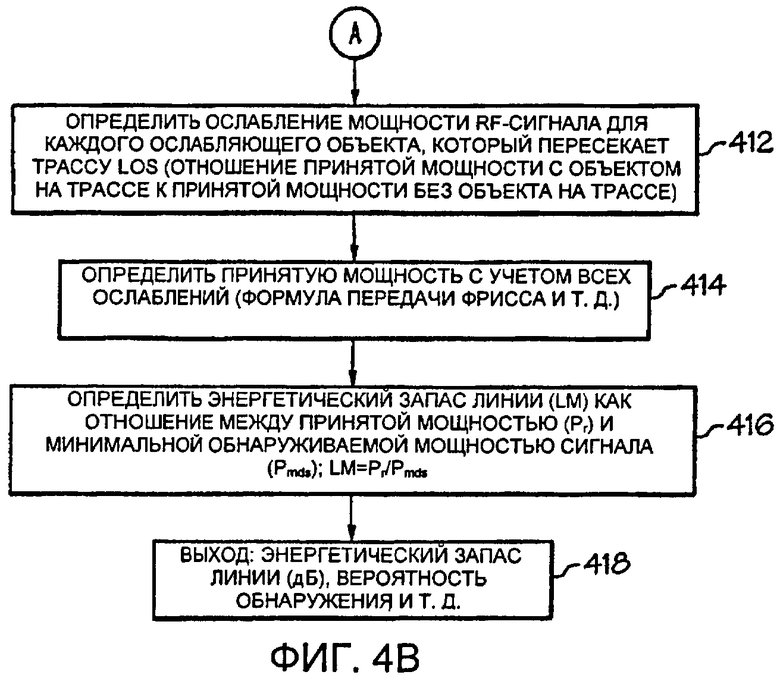
В блоке или модуле 412 можно определить ослабление мощности RF-сигнала для каждого ослабляющего объекта, который пересекает трассу LOS. Ослабление мощности RF-сигнала может включать в себя отношение принимаемой мощности при наличии объекта на трассе к принимаемой мощности при отсутствии объекта на трассе.
В блоке или модуле 414 можно определить мощность, принимаемую на приемнике, с учетом всех ослаблений. В одном варианте выполнения настоящего изобретения принимаемую мощность можно определить при помощи формулы передачи Фрисса или другим образом. Формулу передачи Фрисса можно определить формулой 1:

где
Pr = принимаемая мощность (в ваттах);
Gt = коэффициент усиления передающей антенны в направлении трассы LOS;
Lt = ослабление мощности в передающем тракте между передатчиком и передающей антенной;
Gr = коэффициент усиления приемной антенны в направлении трассы LOS;
Lr = ослабление мощности на передающем тракте между передатчиком и передающей антенной;
λ = длина радиоволны (в метрах);
r = расстояние между передающей и приемной антеннами (в метрах);
n = экспоненциальная постоянная распространения, для безвоздушного пространства обычно n=2;
Lpath = произведение всех величин ослабления мощности от ослабляющих объектов на трассе LOS.
В блоке или модуле 416 может быть определен энергетический запас линии связи (LM) как отношение между принимаемой мощностью (Pr) и минимально обнаруживаемой мощностью (Pmds):

В блоке или модуле 418 энергетический запас линии связи в децибелах (дБ), вероятность обнаружения или любой параметр эффективности линии может быть выведен или представлен пользователю посредством дисплея или иного средства вывода. Способ 400 можно применять для определения эффективности каждой трассы или линии LOS.
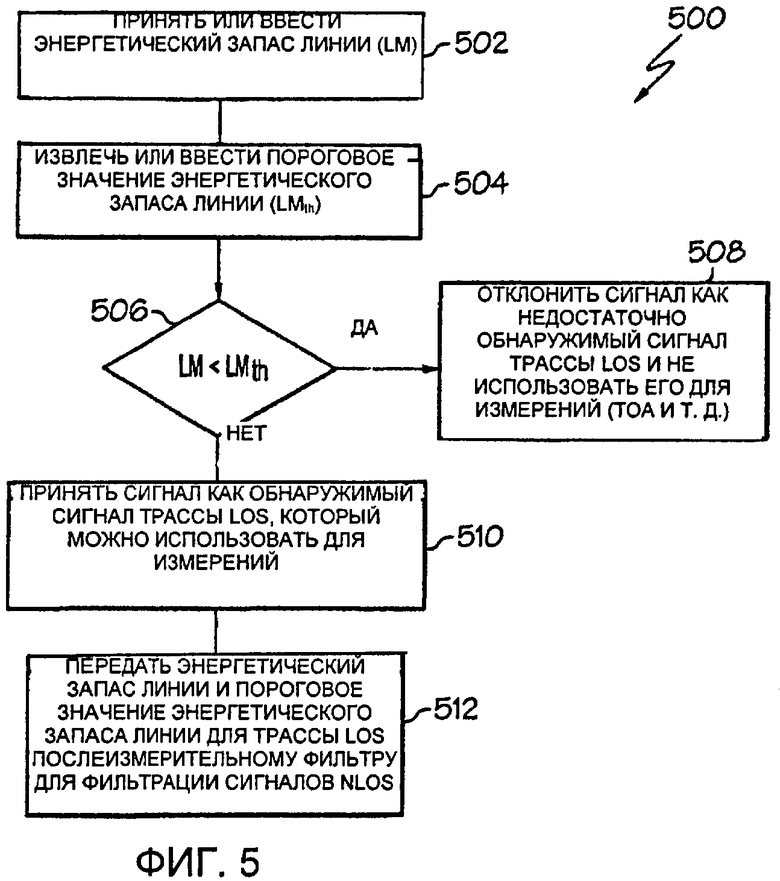
На фиг.5 приведена блок-схема последовательности операций для примера способа 500 фильтрации трасс LOS до проведения измерений с целью фильтрации низкоэффективных линий или сигналов LOS до измерений времени прибытий или измерений дальности сигналов в соответствии с вариантом выполнения настоящего изобретения. Способ 500 может быть реализован в блоке или модуле 208 способа 200 на фиг.2 или использоваться для этого блока.
В блоке или модуле 502 может быть принят или введен энергетический запас линии связи (LM). Энергетический запас линии связи может быть определен способом 400 (фиг.4) или из блока 204 на фиг.2. В блоке 504 может быть извлечено из памяти другого источника данных или введено пользователем пороговое значение (LMth) энергетического запаса линии связи. В блоке 506 может быть определено, меньше ли энергетической запас линии порогового значения энергетического запаса линии связи. Если энергетический запас линии связи меньше порогового значения энергетического запаса линии связи, способ 500 может перейти к блоку 508. В блоке или модуле 508 сигнал, связанный с линией или трассой, может быть отвергнут в связи с тем, что он является недостаточно обнаруживаемым сигналом трассы LOS, и этот сигнал не будет использоваться в измерениях, например в измерениях времени прибытий (ТОА), измерениях дальности или аналогичных измерениях для определения местоположения приемника или приемного устройства.
Если энергетический запас линии связи не меньше значения энергетического запаса линии связи, способ 500 может перейти к блоку 510. В блоке 510 сигнал и связанная с ним линия могут быть приняты в качестве обнаруживаемой трассы LOS, и принятые сигнал или сигналы могут применяться в целях измерений.
В блоке 512 энергетический запас линии связи, пороговое значение энергетического запаса линии связи и (или) иную информацию об эффективности (блок данных 206 на фиг.2) можно передать послефильтру, такому как блок или модуль 212 на фиг.2, для фильтрации других сигналов и связанных с ними трасс, таких как сигналы или трассы NLOS.
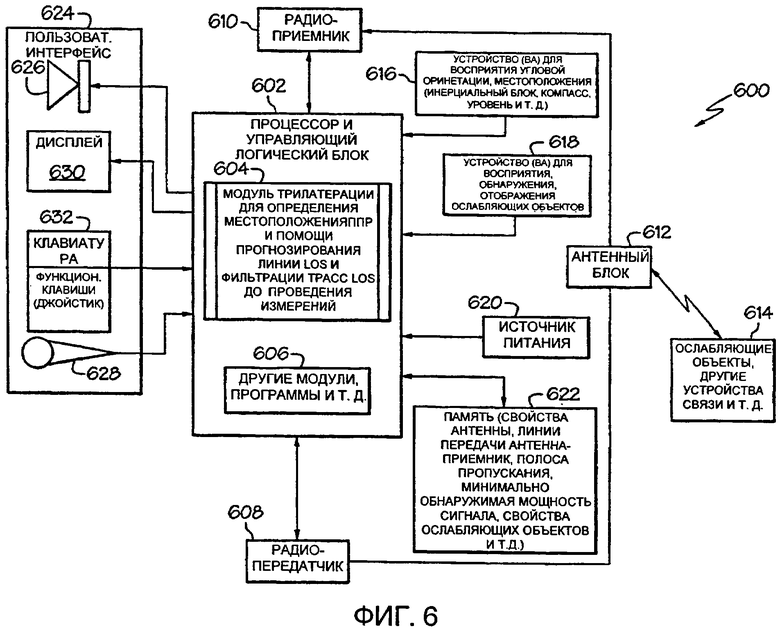
На фиг.6 приведена блок-схема примера устройства 600, выполненного с возможностью определять местоположения с использованием трилатерации, прогнозирования эффективности линий LOS и фильтрации трасс LOS до проведения измерений в соответствии с вариантом выполнения настоящего изобретения. Способ 200 на фиг.2, способ 400 на фиг.4 и способ 500 на фиг.5 могут быть реализованы в устройстве 600 или выполняться устройством 600. Устройство 600 может включать в себя процессор и блок 602 управляющей логики или тому подобный блок для управления работой устройства 600 и для выполнения заданных функций, таких как определение или оценка местоположения устройства 600.
В процессоре 602 может функционировать модуль 604 трилатерации для определения местоположения. Модуль 604 трилатерации может определить или оценить местоположение устройства 600 с использованием прогнозирования линий LOS и фильтрации трасс LOS до проведения измерений. Способы 200, 400 и 500 соответственно на фиг.2, 4 и 5 могут быть реализованы в модуле 604 трилатерации.
В процессоре и блоке 602 управляющей логики могут функционировать другие модули, программное обеспечение и тому подобное для выполнения других операций, таких как прием и передача сигналов. С этой целью устройство 600 может включать в себя радиопередатчик 608 и радиоприемник. 610. Передатчик 608 и приемник 610 могут соответственно передавать и принимать сигналы через антенный блок 612. Соответственно, сигналы могут быть передаваться и приниматься от других устройств 614 связи или подобных устройств. Переданные и принятые сигналы могут пересекать ослабляющие объекты аналогично описанному выше в отношении фиг.3.
Устройство 600 может также включать в себя одно или несколько устройств 616 для восприятия угловой ориентации и местоположения устройства 600 или антенного блока 612. Как было сказано выше, примерами устройства 616 для восприятия угловой ориентации и местоположения устройства 600 могут быть инерциальный блок, компас, уровень или иное устройство.
Устройство 600 может также включать в себя одно или несколько устройств 618 для восприятия, обнаружения и отображения любых ослабляющих объектов в рабочей окружающей среде или вблизи устройства 600, которые могут находиться на пути любых сигналов, принимаемых устройством 600. Примеры устройства 618 для восприятия, обнаружения и отображения любых ослабляющих объектов могут включать в себя RF-устройства, оптические устройства, звуковые устройства, инфракрасные устройства или подобные устройства для восприятия, обнаружения и отображения любых ослабляющих устройств вблизи устройства 600. Устройства 616 и 618 могут быть выполнены или предоставлены в качестве компонентов устройства 600 или могут представлять собой отдельные блоки, связанные с устройством 600.
Устройство 600 может также включать в себя источник питания 620. Источник питания 620 может быть батареей или иным устройством накопления энергии для обеспечения мобильных работ.
Устройство 600 может дополнительно включать в себя память 622 для хранения данных, которые могут использоваться модулем 604 трилатерации для определения местоположения. Память 622 может хранить данные или информацию, такую как свойства антенны, свойства линии передачи антенна-приемник, полосы пропускания сигнала, минимально обнаружимая мощность сигнала, свойства ослабляющих объектов и другие параметры или свойства.
Устройство 600 может также включать в себя пользовательский интерфейс 624 для предоставления пользователю возможности взаимодействовать с устройством 600 и управлять им. Пользовательский интерфейс 624 может включать динамик 626 для получения звуковых сигналов, таких как голосовой обмен информацией или другие звуковые сигналы, и микрофон 628 для приема голосовых сигналов от пользователя или для приема других звуковых сигналов. Пользовательский интерфейс 624 может также включать в себя дисплей 630 для представления пользователю информации, такой как информация о местоположении, информация об эффективности линии (энергетический запас линии, вероятность обнаружения и т.д.) и другая информация, связанная с операцией устройства 600.
Пользовательский интерфейс 624 может дополнительно включать в себя вспомогательную клавиатуру 632, клавиатуру, функциональные клавиши, джойстик или иное средство интерфейса для обеспечения ввода команд для управления работой устройства 600 или для выполнения отдельных функций, таких как определение местоположения, обеспечение связи или другие функции.
Блок-схемы последовательности операций и блок-схемы на чертежах иллюстрируют архитектуру, функциональные возможности и работу возможных вариантов реализации систем, способов и компьютерных программных продуктов согласно различным вариантам выполнения изобретения. В этом отношении каждый блок в блок-схеме последовательности операций или блок-схемах может представлять модуль, сегмент или участок кода, который содержит одну или несколько исполняемых команд для реализации определенной(ых) логической(их) функции(ий). Следует также заметить, что в некоторых альтернативных вариантах реализации функции, указанные в блоке, могут выполняться в порядке, отличном от указанного на чертежах. Например, два блока, изображенные последовательно, могут в действительности выполняться по существу одновременно, или блоки могут иногда выполняться в обратном порядке в зависимости от используемых функциональных возможностей. Следует также заметить, что каждый блок на блок-схемах последовательности операций и (или) блок-схемах и сочетаниях блоков на блок-схемах последовательности операций и (или) блок-схемах могут быть реализованы при помощи аппаратной системы специального назначения, которая выполняет определенные функции или действия или при помощи сочетаний аппаратной системы специального назначения и компьютерных команд.
Используемая в настоящей заявке терминология предназначена только для описания частных вариантов выполнения и не накладывает никаких ограничений на изобретение. В настоящей заявке подразумевается, что формы единственного числа включают в себя также формы множественного числа, если иное не следует с очевидностью из контекста. Следует также понимать, что термины "содержит" и (или) "содержащий", используемый в настоящем описании, указывают на наличие перечисленных признаков, целых чисел, этапов, операций, элементов и (или) компонентов, но не исключают наличия или добавления одного или нескольких иных признаков, целых чисел, этапов, операций, элементов, компонентов и (или) их групп.
Хотя в настоящей заявке были проиллюстрированы и описаны частные варианты выполнения, специалистам в данной области техники должно быть понятно, что любая схема, которая, согласно расчетам, обеспечивает достижение той же цели, может заменить приведенные частные варианты выполнения, и что изобретение имеет другие применения при других условиях. Подразумевается, что настоящая заявка охватывает любые адаптации и видоизменения настоящего изобретения. Нижеприведенная формула ни в коей мере не подразумевает ограничение объема изобретения частными вариантами выполнения, описанными в настоящей заявке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ УСТРОЙСТВА СВЯЗИ | 2007 |
|
RU2467343C2 |
| РАДИОЧАСТОТНАЯ НАВИГАЦИЯ С ИСПОЛЬЗОВАНИЕМ СОПОСТАВЛЕНИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК | 2007 |
|
RU2459217C2 |
| СИСТЕМЫ И СПОСОБЫ СНИЖЕНИЯ УРОВНЯ ПОМЕХ В ПРЕДЕЛАХ АКТИВНО ИСПОЛЬЗУЕМОГО ДИАПАЗОНА ЧАСТОТ | 2017 |
|
RU2763167C2 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| СПОСОБ ОРГАНИЗАЦИИ АВИАЦИОННОЙ РАДИОСВЯЗИ ЗА ПРЕДЕЛАМИ ПРЯМОЙ ВИДИМОСТИ | 2006 |
|
RU2342786C2 |
| СИСТЕМА СВЯЗИ ПРЯМОЙ ВИДИМОСТИ СВЧ-ДИАПАЗОНА С НЕСКОЛЬКИМИ ВХОДАМИ И ВЫХОДАМИ ДЛЯ ПРИМЕНЕНИЯ В ПОМЕЩЕНИИ | 2013 |
|
RU2610460C2 |
| СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2625171C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В УСЛОВИЯХ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ РАДИОВОЛН | 2023 |
|
RU2805566C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО УСТРОЙСТВА | 2008 |
|
RU2455661C2 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |
Изобретение относится к области навигации и определения местоположения устройства, в частности, методом трилатерации с использованием прогнозирования линий связи в пределах прямой видимости (LOS) и фильтрации трасс в пределах прямой видимости. Заявленный способ трилатерации включает в себя прием сигнала по каждой из множества трасс LOS и прогнозирование эффективности каждой из трасс LOS, фильтрацию сигналов, принятых по трассам LOS, с эффективностью ниже заданного порогового значения. Заявленный способ может дополнительно включать в себя выполнение трилатерации с использованием неотфильтрованных сигналов для определения по существу местоположения устройства связи. Достигаемый технический результат заключается в повышении точности определения местоположения устройства связи. 5 н. и 29 з.п. ф-лы, 6 ил.
1. Способ трилатерации для определения положения устройства связи, предусматривающий стадии, на которых:
принимают сигнал от каждого из множества передающих устройств по каждой из множества трасс с прямой видимостью;
прогнозируют эффективность трассы с прямой видимостью;
отфильтровывают сигналы, принятые по трассам с прямой видимостью, с эффективностью ниже заданного порогового значения; и
выполняют трилатерацию с использованием неотфильтрованных сигналов для определения, по существу, местоположения устройства связи.
2. Способ по п.1, дополнительно содержащий стадию, на которой измеряют время прибытия для каждого сигнала.
3. Способ по п.2, в котором фильтрация сигналов, принятых по трассе с прямой видимостью, имеющих эффективность ниже заданной пороговой величины, выполняется до измерения времени прибытия каждого сигнала.
4. Способ по п.1, дополнительно содержащий стадию, на которой осуществляют фильтрацию сигналов, принятых по трассе с непрямой видимостью.
5. Способ по п.1, дополнительно содержащий стадию, на которой предоставляют спрогнозированную эффективность трасс для фильтрации сигналов после выполнения измерения времени прибытия.
6. Способ по п.1, в котором прогнозирование эффективности каждой трассы с прямой видимостью включает в себя прогнозирование энергетического запаса линии для каждой трассы с прямой видимостью.
7. Способ по п.1, дополнительно содержащий стадии, на которых:
измеряют время прибытия для каждого сигнала, при этом фильтрация сигналов, принятых по трассам с прямой видимостью, с эффективностью ниже заданного порогового значения, выполняется до измерения времени прибытия каждого сигнала; и
отфильтровывают любые иные сигналы после выполнения измерения времени прибытия.
8. Способ по п.7, дополнительно содержащий стадию, на которой предоставляют спрогнозированную эффективность трассы для использования при фильтрации любых иных сигналов после выполнения измерений времени прибытия.
9. Способ по п.1, дополнительно содержащий стадии, на которых:
определяют пересечения между трассой с прямой видимостью и каким-либо ослабляющим объектом;
определяют ослабление мощности радиочастотного сигнала для каждого ослабляющего объекта; и
прогнозируют энергетический запас линии для каждой трассы с прямой видимостью.
10. Способ по п.1, дополнительно содержащий стадию, на которой оценивают местоположение и угловую ориентацию приемной антенны.
11. Способ по п.1, дополнительно содержащий стадию, на которой оценивают местоположение и угловую ориентацию передающей антенны.
12. Способ по п.1, дополнительно содержащий стадию, на которой оценивают группу характеристик любых ослабляющих сигнал объектов, находящихся в рабочей среде устройства, при этом группа характеристик включает в себя местоположение в рабочей среде, физические размеры и электромагнитные ослабляющие свойства.
13. Способ по п.1, дополнительно содержащий стадию, на которой считают возможным использовать для выполнения трилатерации сигналы в случае, если энергетический запас линии больше или равен заданному значению энергетического запаса линии.
14. Способ трилатерации для определения местоположения приемника, предусматривающий стадии, на которых:
прогнозируют эффективность радиолинии для каждой радиолинии между приемником и каждым из множества передатчиков;
выбирают радиолинии для измерений дальности, которые обладают наилучшей спрогнозированной эффективностью относительно других радиолиний; и
определяют местоположение приемника с использованием выбранных радиолиний для измерений дальности.
15. Способ по п.14, дополнительно содержащий стадию, на которой определяют по меньшей мере одно из энергетического запаса линии и вероятности обнаружения сигналов для каждой радиолинии.
16. Способ по п.14, дополнительно содержащий стадию, на которой предоставляют информацию о любых граничных сигналах и радиолиниях для использования при фильтрации сигналов для снижения вероятности ошибок трассы с непрямой видимостью.
17. Способ по п.14, дополнительно содержащий стадию, на которой отфильтровывают радиолинии, у которых энергетический запас линии ниже заданного порогового значения.
18. Способ по п.14, дополнительно содержащий стадию, на которой принимают во внимание любые ослабляющие объекты при прогнозировании эффективности радиолинии для каждой радиолинии.
19. Способ по п.18, в котором принятие во внимание любых ослабляющих объектов содержит этапы, на которых:
определяют любые пересечения между каждой радиолинией и любыми ослабляющими объектами; и
определяют ослабление мощности сигнала для каждого ослабляющего объекта.
20. Способ по п.14, дополнительно содержащий стадию, на которой обеспечивают возможность выбора минимум трех источников обнаружимого сигнала для определения местоположения.
21. Способ по п.14, дополнительно содержащий стадию, на которой выполняют фильтрацию до проведения измерений и после проведения измерений.
22. Устройство для трилатерации, содержащее:
приемник для приема сигнала от каждого из множества передатчиков по соответствующей радиотрассе;
модуль для прогнозирования эффективности каждой радиотрассы;
фильтрующее устройство для фильтрации сигналов, принятых по радиотрассам, с соответствующей эффективностью ниже заданного порогового уровня;
модуль для определения местоположения приемника с использованием неотфильтрованных сигналов; и
устройство вывода для представления местоположения приемника или устройства, связанного с приемником.
23. Устройство по п.22, дополнительно содержащее устройство для восприятия угловой ориентации и местоположения устройства или приемника.
24. Устройство по п.22, дополнительно содержащее по меньшей мере одно устройство для восприятия, обнаружения или отображения любых ослабляющих объектов на соответствующих радиотрассах.
25. Устройство по п.22, дополнительно содержащее память, причем память содержит по меньшей мере одно из свойств антенны для антенны, связанной с приемником, свойств передающей линии антенна-приемник, параметра полосы пропускания, параметра минимальной обнаружимой мощности сигнала и свойств, связанных с любыми ослабляющими объектами на соответствующих радиотрассах.
26. Устройство по п.22, в котором фильтрующее устройство отфильтровывает сигналы до выполнения каких-либо измерений для определения местоположения приемника.
27. Устройство для трилатерации, содержащее:
средство для прогнозирования эффективности радиолинии для каждой радиолинии между приемником и каждым из множества передатчиков;
средство для выбора радиолиний для измерений дальности, которые имеют наилучшую спрогнозированную эффективность относительно других радиолиний; и
средство для определения местоположения приемника с использованием выбранных радиолиний для измерений дальности.
28. Устройство по п.27, дополнительно содержащее предварительный фильтр для фильтрации любых радиолиний, имеющих спрогнозированную эффективность ниже заданного уровня, до измерений для определения местоположения приемника.
29. Устройство по п.27, дополнительно содержащие послефильтр для сокращения ошибок трасс с непрямой видимостью после измерений для определения местоположения приемника.
30. Устройство по п.29, дополнительно содержащее средство для предоставления послефильтру информации об эффективности радиолинии.
31. Устройство по п.27, в котором устройство используют в связи с транспортным средством для обнаружения местоположения транспортного средства.
32. Транспортное средство, содержащее:
устройство для определения местоположения транспортного средства, причем устройство включает в себя:
приемник, принимающий сигнал по каждой радиолинии;
средство для прогнозирования эффективности радиолинии для каждой радиолинии между приемником и каждым из множества передатчиков;
средство для выбора радиолиний для измерений дальности, которые имеют лучшую спрогнозированную эффективность относительно других радиолиний; и
средство для определения местоположения транспортного средства с использованием выбранных радиолиний для измерений дальности.
33. Транспортное средство по п.32, дополнительно содержащее предварительный фильтр для фильтрации любых радиолиний, имеющих спрогнозированную эффективность ниже заданного уровня, до проведения измерений для определения местоположения приемника.
34. Транспортное средство по п.32, дополнительно содержащее послефильтр для сокращения ошибок трасс с непрямой видимостью после измерений для определения местоположения приемника.
| US 2001048387 A1, 06.12.2001 | |||
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
RU2084916C1 |
| СПОСОБ РАСПОЗНАВАНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2060513C1 |
| АБОНЕНТСКОЕ УСТРОЙСТВО ДЛЯ СПУТНИКОВОЙ СИСТЕМЫ СВЯЗИ С МНОГОСТАНЦИОННЫМ ВРЕМЕННЫМ ДОСТУПОМ | 1991 |
|
RU2090002C1 |
| US 6278404 В1, 21.08.2001 | |||
| US 2003058161 A1, 27.03.2003 | |||
| WO 03038466 A2, 08.05.2003. | |||

