Изобретение относится к радиолокации, в частности к имитаторам сигнала цели моноимпульсной радиолокационной станции (РЛС), и может быть использовано для исследования процессов обнаружения и сопровождения целей при взаимном перемещении целей и РЛС.
Известен имитатор цели [1], располагаемый в безэховой камере, содержащий большой эллиптический отражатель, установленный в дальней зоне антенны РЛС. Сама РЛС находится в одном из фокусов эллипсоида, в то время как во втором фокусе расположен излучающий элемент имитатора в виде многолучевой фазированной антенной решетки (ФАР). Множество СВЧ сигналов модулируются по параметрам, соответствующим параметрам имитируемых целей, излучаются ФАР по независимым лучам и после переотражения от эллиптического отражателя принимаются антенной испытуемой РЛС. При этом каждый отраженный от эллиптического отражателя луч имитирует сигнал от отдельной цели или разрешаемого элемента сцены. Уровень сигналов на выходе антенны РЛС определяется не только уровнем сигналов, сформированных имитатором в направлении лучей ФАР и отраженных от эллипсоида, но и рассогласованием переотраженного эллипсоидом луча имитатора относительно текущего направления оси визирования проверяемой РЛС.
Недостатком данного имитатора является большая стоимость имитатора, определяемая как сложностью создания эллиптического отражателя с требуемыми характеристиками, так и стоимостью комплектующей его ФАР.
Известен имитатор цели [2], работающий в безэховой камере, в котором через приемную антенну принимается сигнал проверяемой РЛС, переносится на промежуточную частоту, задерживается по времени в соответствии с дальностью имитируемой цели, сдвигается по доплеровской частоте в соответствии с радиальной скоростью имитируемой цели, модулируется по амплитуде в соответствии с эффективной площадью рассеяния (ЭПР) цели и ее дальностью от проверяемой РЛС, переносится обратно на несущую частоту, излучается через передающую антенну в качестве имитируемого сигнала цели. Имитация углового положения цели может быть выполнена за счет управляемого механического перемещения антенны имитатора по сфере, центром которой является проверяемая РЛС.
Недостатком имитатора является невозможность имитации протяженных целей, для которых угловые положения разрешаемых элементов цели не совпадают.
В имитаторе цели [3], принятом в качестве прототипа, производится управляемое смещение СВЧ имитированного сигнала цели как по дальности и радиальной скорости, так и по углу. Выполняется это следующим образом. Внешний сигнал, совпадающий с зондирующим сигналом РЛС, запускает формирователь зондирующего сигнала (в дальнейшем называемый формирователем задержанного сигнала), который на несущей частоте формирует СВЧ импульс, задержанный относительно запускающего и имеющий расчетную длительность. Полученный сигнал последовательно модулируется по амплитуде законом амплитудной флюктуации отраженного сигнала, делится по мощности на два сигнала, порознь регулируемые по мощности и в сумме равные мощности сигнала на входе делителя, усиливаются по мощности и излучаются в сторону проверяемой РЛС двумя антеннами, находящимися на дуге окружности с центром, совпадающим с антенной РЛС. Усиления антенн имитатора равны, угловой разнос антенн имитатора равен ширине ДНА РЛС. Управление задержкой и длительностью сигнала в формирователе задержанного сигнала, ослабление сигнала в аттенюаторе (амплитудной модуляцией имитируемого сигнала) по закону флюктуации отраженного сигнала и уровнями сигналов на выходе делителя мощности в зависимости от углового положения цели производится схемой управления, являющейся составной частью имитатора.
В отличие от имитатора [2] имитатор [3] обеспечивает управляемое угловое перемещение и угловые флюктуации цели в пределах углового сектора, равного ширине суммарной диаграммы направленности антенны (ДНА) моноимпульсной РЛС без механического перемещения антенн имитатора, центр сектора совпадает с направлением на центр антенной системы имитатора.
Недостатком имитатора является невозможность имитировать отраженные сигналы РЛС в режиме обзора, поскольку соотношение мощностей излучаемых антеннами имитатора сигналов должно изменяться в зависимости от угла между направлением оси ДНА РЛС и направлением на центр антенной системы имитатора. Кроме того, имитатором [3] не обеспечивается имитация множества подвижных по углу целей, в том числе протяженных, в угловом секторе, большем ширины суммарной ДНА моноимпульсной РЛС.
Целью предлагаемого изобретения является повышение достоверности имитации сигнала сцены моноимпульсной РЛС за счет обеспечения возможности имитации множества подвижных по дальности и углу целей, в том числе протяженных, в угловом секторе, минимум в два раза большем ширины суммарной ДНА проверяемой РЛС.
Заявленная цель достигается за счет увеличения углового разноса пары антенн имитатора до двойной ширины суммарной ДНА моноимпульсной РЛС, манипуляции углового положения излучающей пары антенн имитатора, на величину, равную половине ширины боковых лепестков суммарной ДНА моноимпульсной РЛС по нулевому уровню, в сторону, где при текущем положении антенны РЛС и направлении на имитируемую цель требуемая излучаемая мощность минимальна, перестройкой мощностей сигналов, излучаемых парой антенн, в соотношении, определяемом угловыми положениями цели, центра излучающих антенн и направления визирования РЛС.
Для решения поставленной цели в способе имитации цели [3], включающем формирование задержанных СВЧ сигналов с модуляцией, соответствующей модуляции зондирующих сигналов РЛС, с задержкой относительно зондирующих сигналов РЛС, соответствующей дальности до цели, и сдвигом несущей частоты на величину доплеровского смещения, определяемого радиальной скоростью цели, которые модулируются по амплитуде в соответствии с дальностью, эффективной площадью рассеяния цели и случайными временными флюктуациями, характерными для отражающей цели, полученный сигнал излучается парой антенн, находящихся на дуге окружности с центром, совпадающим с антенной РЛС, в соотношении, определяемом угловым положением цели, центра излучающей пары и направлением визирования РЛС, отличающемся тем, что задержанный СВЧ сигнал получают задержкой зондирующего сигнала РЛС, принятого имитатором, и дополнительным ослаблением на величину, при которой максимум задержанного СВЧ сигнала, соответствующий совпадению направления визирования РЛС с направлением на имитатор, устанавливается во время калибровки в окне допуска, угловой разнос пары излучающих антенн имитатора выбирается равным двойному значению ширины суммарной ДНА моноимпульсной РЛС, при боевой работе местоположение излучающей пары манипулируется по углу на величину, равную половине ширины боковых лепестков суммарной ДНА моноимпульсной РЛС по нулевому уровню, в сторону, где при текущем положении антенны РЛС и направлении на имитируемую цель требуемая излучаемая мощность минимальна, соотношение мощностей, излучаемых парой антенн, манипулируемых по угловому положению, перестраивается в соответствии с текущими угловыми положениями цели, центра манипулируемых пар антенн и направлением визирования РЛС.
Сущность изобретения поясняется дальнейшим описанием и чертежами имитатора сигнала цели.
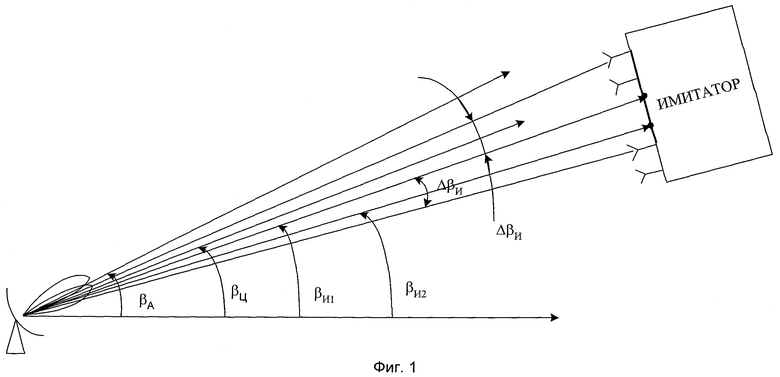
На фиг.1 изображена геометрия расположения проверяемой РЛС и имитатора.
На фиг.2 изображены угловые зависимости суммарной ϑΣ(βА-βЦ) и разностной ϑΔ(βА-βЦ) ДНА моноимпульсной РЛС и параметра Z(βА-βЦ, βИ), определяющего динамический диапазон перестройки сигнала имитатора при работе одной излучающей пары антенн.
На фиг.3 изображены эпюры, поясняющие связь сигнала манипуляции положения излучающей пары антенн П(βА-βЦ) с параметрами Z(βА-βЦ, βИi) излучающих пар.
На фиг.4 изображена структура предлагаемого имитатора цели.
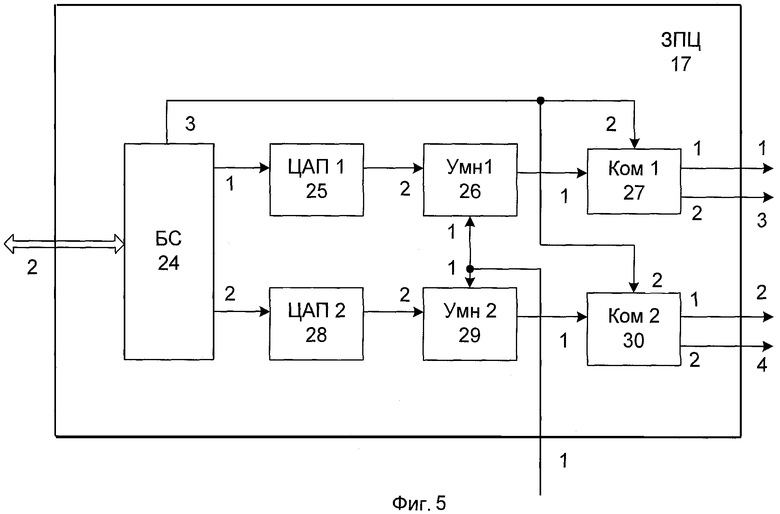
На фиг.5 изображена структура задатчика положения цели.
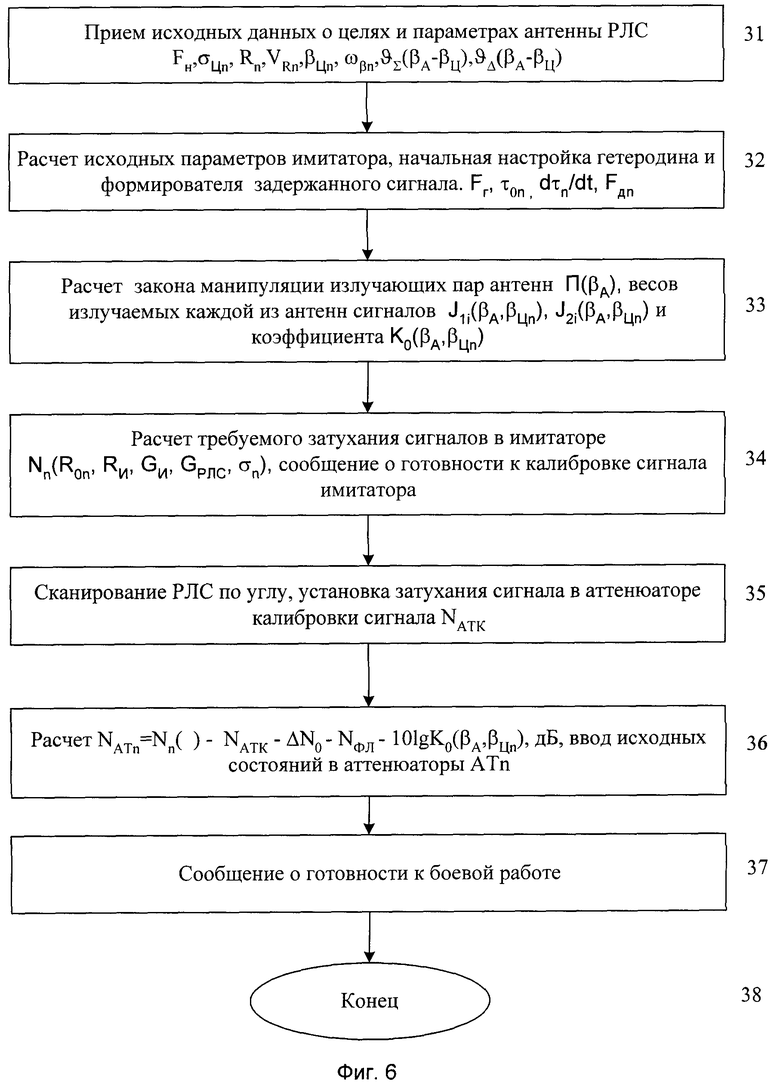
На фиг.6 изображен алгоритм работы имитатора.
На фиг.4 приняты следующие обозначения:
1 - Первая антенна (А1);
2 - Первый смеситель (СМ1);
3 - Первый сумматор (СУМ1);
4 - Вторая антенна (А2);
5 - Второй смеситель (СМ2);
6 - Второй сумматор (СУМ2);
7 - Третья антенна (A3);
8 - Третий смеситель (СМ3);
9 - Третий сумматор (СУМ3);
10 - Четвертая антенна (А4);
11 - Антенный переключатель (АП);
12 - Четвертый смеситель (СМ4);
13 - Четвертый сумматор (СУМ4);
14 - Пятый смеситель (СМ5);
15n - n-ный формирователь задержанного сигнала (ФЗСn);
16n- n-ный аттенюатор задержанного сигнала (АТn);
17n - n-ный задатчик положения цели (ЗПЦn);
18 - Аттенюатор калибровки сигнала (АТК);
19 - Детектор (Д);
20 - Аналого-цифровой преобразователь (АЦП);
21 - Вычислитель (ВУ);
22 - Делитель мощности (ДМ);
23 - Синтезатор частоты (Сч).
На фиг.4 - первый сумматор 3 через первый смеситель 2 соединен с входом первой антенны 1, второй сумматор 6 через второй смеситель 5 соединен с входом второй антенны 4, третий сумматор 9 через третий смеситель 8 соединен с входом третьей антенны 7, четвертый сумматор 13 через последовательно соединенные четвертый смеситель 12 и антенный переключатель 11 соединен с входом-выходом четвертой антенны 10, первый выход антенного переключателя 11 через последовательно соединенные аттенюатор калибровки сигнала 18, детектор 19 и аналого-цифровой преобразователь (АЦП) 20 соединен с первым входом вычислителя 21, выход аттенюатора калибровки сигнала 18 через пятый смеситель соединен с первыми выходами N формирователей задержанных сигналов 15l…15N, каждый n-ный формирователь задержанного сигнала 15n через соответствующий аттенюатор задержанного сигнала 16n соединен с первым входом n-ного задатчика положения цели 17n, второй вход-выход вычислителя 21 соединен с аналогичными входами-выходами аттенюатора калибровки сигнала 18, формирователей задержанных сигналов 15l…15N, аттенюаторов задержанных сигналов 16l…16N, задатчиков положения цели 17l…17N и синтезатора частоты 23, первые выходы N задатчиков положения цели 17l…17N соединены с N входами первого сумматора 3, вторые выходы N задатчиков положения цели 17l…17N соединены с N входами второго сумматора 6, третьи выходы N задатчиков положения цели 17l…17N соединены с N входами третьего сумматора 9, четвертые выходы N задатчиков положения цели 17l…17N соединены с N входами четвертого сумматора 13, выход синтезатора частоты 23 соединен с входом делителя мощности, выходы которого с первого по пятый соединены со вторыми входами первого 2, второго 5, третьего 8, четвертого 12 и пятого 14 смесителей соответственно, третий вход-выход вычислителя является интерфейсным входом-выходом имитатора.
На фиг.5 приняты следующие обозначения:
24 - Блок связи (БС);
25 - Первый цифроаналоговый преобразователь (ЦАП1);
26 - Первый умножитель (Умн1);
27 - Первый коммутатор (Ком1);
28 - Второй цифроаналоговый преобразователь (ЦАП2);
29 - Второй умножитель (Умн2);
30 - Второй коммутатор (Ком2).
В задатчике положения цели 17, изображенном на фиг.5, вход-выход блока связи 24 является вторым входом-выходом задатчика положения цели 17, третий выход блока связи 24 соединен со вторыми входами первого 27 и второго 30 коммутаторов, первый выход блока связи 24 через последовательно соединенные первый цифроаналоговый преобразователь 25 и первый умножитель 26 соединен с первым входом первого коммутатора 27, второй выход блока связи через последовательно соединенные второй цифроаналоговый преобразователь 28 и второй умножитель 29 соединен с первым входом второго коммутатора 30, первый и второй выходы первого коммутатора 27 являются первым и третьим выходами задатчика положения цели 17 соответственно, первый и второй выходы второго коммутатора 30 являются вторым и четвертым выходами задатчика положения цели 17 соответственно.
В качестве схемы формирователя задержанного сигнала 15 может быть использован модуль 1879ВМЗ разработки ОАО «Модуль», либо построен по схеме [4, с.171, рис.6.21]. В качестве управляемых аттенюаторов 18 и 16 может быть использован аттенюатор AD 6630 фирмы Analog Device. В качестве вычислителя 21 может быть использована персональная ЭВМ типа Pentium, дополненная элементами сопряжения с управляемыми элементами. Остальные элементы широко используются в радиолокации и не требуют пояснений по реализации.
Согласно предлагаемому способу в имитаторе перед боевой работой производится калибровка максимума задерживаемого сигнала, принятого имитатором, путем установки дополнительного затухания в цепи приема сигнала, при котором максимум задержанного сигнала, соответствующий совпадению направления визирования РЛС с направлением на имитатор, устанавливается в окне допуска, при боевой работе задержанный сигнал перестраивается в соответствии с дальностью до цели τ и сдвигается по несущей частоте на величину доплеровского смещения fД, определяемого радиальной скоростью цели VR, дополнительно ослабляется до уровня UA, определяемого флюктуациями отражения сигнала Nфл(t) от цели по случайному закону, значением ЭПР цели σц и дальностью до цели τ, угловым рассогласованием направления визирования РЛС βА относительно углового положения цели βЦ и положения центра антенн излучающей пары βИi где  . Полученный сигнал излучается парой пространственно разнесенных антенн с весами К1 и К2, определяемыми как текущими угловыми положениями антенны РЛС βА, цели βЦ, центра излучающей пары антенн βИi, так и суммарными ϑΣ(βА-βЦ) и разностными ϑΔ(βА-βЦ) ДНА моноимпульсной антенны РЛС. При этом суммарный и разностные сигналы на выходе моноимпульсной антенны РЛС равны:
. Полученный сигнал излучается парой пространственно разнесенных антенн с весами К1 и К2, определяемыми как текущими угловыми положениями антенны РЛС βА, цели βЦ, центра излучающей пары антенн βИi, так и суммарными ϑΣ(βА-βЦ) и разностными ϑΔ(βА-βЦ) ДНА моноимпульсной антенны РЛС. При этом суммарный и разностные сигналы на выходе моноимпульсной антенны РЛС равны:
UΣ=UA[К1ϑΣ(βА-βИi-ΔβИ)+К2ϑΣ(βА-βИi+ΔβИ)],
UΔ=UA[К1ϑΔ(βА-βИi-ΔβИ)+К2ϑΔ(βА-βИi+ΔβИ)].
Из расчета с учетом геометрии фиг.1 следует, что для получения сигнала имитируемой цели с направления βЦ и амплитудой UЦ при направлении антенны РЛС под углом βА и ортогональности базы антенн направлению на РЛС весовые коэффициенты K1 и К2 должны быть равны:


где 
UЦ - амплитуда сигнала цели,

Численные расчеты Z(βA, βИ1) для любого значения βИ1 и угловом разносе антенной пары 2ΔβИ, равном удвоенному значению ΔϑΣ - ширины суммарной ДНА РЛС, (фиг.2), показывают, что имеются углы βА, для которых Z(βA, βИi) близко к нулю и даже равно ему, соответственно динамический диапазон весов К1 и К2 в рабочем диапазоне углов βА=βц±ΔϑΣ становится недопустимо большим и не реализуемым. Для минимизации излучаемой мощности на заданном положении имитируемой цели βЦ для текущего положения антенны РЛС βА производится манипуляция углового положения излучающей пары на угол ΔСМ, равный половине ширины боковых лепестков суммарной ДНА РЛС, в сторону, где излучаемая мощность минимальна, т.е. модуль Z(βА, βИi) максимален. При этом излучаемые антеннами сигналы должны иметь веса K1 и К2, рассчитанные для нового положения центра излучающей пары βИi.
Устройство, реализующее способ имитации сигнала моноимпульсной РЛС, получаемого от многоцелевой сцены в расширенном угловом диапазоне, изображено на фиг.4, содержит первую и вторую антенны, находящиеся на дуге окружности с центром, совпадающим с антенной РЛС, последовательно соединенные первый формирователь задержанного сигнала, первый аттенюатор задержанного сигнала и первый задатчик положения цели, вычислитель, второй вход-выход которого через магистраль управления соединен со вторыми входами-выходами первого формирователя задержанного сигнала, первого аттенюатора задержанного сигнала и первого задатчика положения цели соответственно, отличается тем, что в него дополнительно введены третья и четвертая антенны, находящиеся на той же дуге окружности с тем же угловым разносом, что и первые две антенны, N-1 последовательных соединений, состоящих из n-ного формирователя задержанного сигнала, n-ного аттенюатора задержанного сигнала и n-ного задатчика положения цели, последовательно соединенные первый сумматор и первый смеситель, выход которого соединен с входом первой антенны, последовательно соединенные второй сумматор и второй смеситель, выход которого соединен со второй антенной, последовательно соединенные третий сумматор и третий смеситель, выход которого соединен с входом третьей антенны, последовательно соединенные четвертый сумматор, четвертый смеситель, антенный переключатель, третий вход-выход которого соединен с четвертой антенной, последовательно соединенные синтезатор частоты, делитель мощности и пятый смеситель, выходы делителя мощности с первого по пятый соединены со вторыми входами смесителей, номера которых одноименны номерам соответствующих выходов делителя мощности, последовательно соединенные аттенюатор калиброванного сигнала, детектор и аналого-цифровой преобразователь (АЦП), выход которого подключен к первому входу вычислителя, а первый вход - к первому выходу антенного переключателя, при этом первые выходы N задатчиков положения цели соединены с N входами первого сумматора, вторые выходы N задатчиков положения цели соединены с N входами второго сумматора, третьи выходы N задатчиков положения цели соединены с N входами третьего сумматора, четвертые выходы N задатчиков положения цели соединены с N входами четвертого сумматора, второй вход-выход вычислителя через магистраль управления соединен со вторыми входами-выходами аттенюатора калибровки сигнала, синтезатора частоты и всех введенных N-1 формирователей задержанного сигнала, N-1 аттенюаторов задержанных сигналов и N-1 задатчиков положения цели, выход аттенюатора калибровки сигнала соединен с первым входом пятого смесителя, выход которого соединен с первыми входами всех N формирователей задержанного сигнала, третий вход-выход вычислителя является интерфейсным входом-выходом имитатора, по которому вводятся исходные данные о координатах целей и их скоростях, параметрах суммарной и разностной ДНА РЛС, текущие данные об угловом положении антенны РЛС, вычислитель по полученным исходным данным производит расчет необходимой частоты гетеродина, исходные задержки сигналов имитируемых целей, скорости их изменения, доплеровские сдвиги частот имитируемых сигналов и вводит их в синтезатор частоты и формирователи задержанных сигналов соответственно, вычисляет по результатам сканирования антенны РЛС в режиме калибровки требуемое затухание сигнала в аттенюаторе калибровки сигнала, текущие затухания сигналов в аттенюаторах задержанных сигналов в боевом режиме, текущие сигналы манипуляции излучающих пар антенн и веса излучаемых антеннами сигналов для управления задатчиками положения цели.
Имитатор цели, изображенный на фиг.4, работает в трех последовательных режимах: 1) прием исходной информации о параметрах РЛС и цели, предварительная настройка имитатора, 2) калибровка уровня имитируемого сигнала, 3) боевая работа. Во всех режимах инициализация работы производится оператором с помощью команд, исходных и текущих данных, приходящих на третий вход-выход вычислителя 23. Работа имитатора в первых двух режимах происходит в соответствии с алгоритмом, приведенным на фиг.6. На имитатор вводятся следующие входные данные: коэффициент усиления антенны РЛС GРЛС, начальные дальности до имитируемых целей R0n, их радиальные скорости VRn, несущая частота Fн РЛС, эффективные площади рассеяния σЦn, угловые положения βЦn, угловые скорости ωβn целей, суммарная ϑΣ(βА-βЦ) и разностная ϑΔ(βА-βЦ) ДНА моноимпульсной РЛС (поз.31, фиг.6). Известными паспортизованными данными являются: дальность от проверяемой РЛС до имитатора RИ, постоянные потери сигнала в имитаторе ΔN0, усиление антенн имитатора GИ. Вычислитель 21 в первом режиме по полученным и известным данным вычисляет (поз.32, фиг.6): 1) начальные задержки сигнала τ0n, скорости их изменения dτn/dt, доплеровский сдвиг Fдn и вводит результаты расчета в соответствующие формирователи задержанных сигналов 15l…l5N, 2) частоту гетеродинного сигнала Fг и вводит ее значение в синтезатор частоты 23, что обеспечивает перенос сигнала РЛС, принимаемого имитатором, на рабочую частоту формирователя задержанного сигнала 15, 3) расчет закона манипуляции П(βА) углового положения излучающей пары антенн и весов J1(βA, βЦn,) и J2(βА, βЦn,) излучаемых парой антенн сигналов в диапазоне углов βА=βЦ±ΔϑΣ (поз.33, фиг.6), в соответствии с выражениями:



где Z(βА, βИi) рассчитываются по выражению (4), иллюстрации зависимостей П(βА), Z(βA, βЦn), Z(βА, βЦn) приведены на фиг.3,
K1(βА, βЦn, βИi), К2(βА βЦn, βИi) находятся по выражениям (1) и (2), считая U0=1,
К0i(βА, βЦn)=max[|К1(βА, βЦn, βИi)|, |К2(βА, βЦn, βИi)|] - нормирующий коэффициент, 4) требуемые затухания сигналов Nn(R0n, RИ, GРЛС, σЦn) в имитаторе для каждой n-ной цели (поз.34, фиг.6) с учетом дальности до цели R0n, дальности до имитатора RИ, коэффициентов усиления антенн имитатора GИ, РЛС GРЛС и ЭПР цели σЦn. После этого вычислитель 21 через третий вход-выход передает сообщение оператору о готовности к режиму калибровки уровня имитируемого сигнала, при этом включается сканирование антенны проверяемой РЛС. Принимаемый четвертой антенной 10 сигнал РЛС через последовательно соединенные антенный переключатель 11, аттенюатор калибровки сигнала 18, детектор 19 и АЦП 20 поступает на первый вход вычислителя 21, где продетектированный и оцифрованный сигнал записывается на каждом интервале сканирования, по результатам записи находится его максимальное значение UM и отклонение ΔU=UM-U0 максимального значения UM от допустимого значения сигнала U0, соответствующего верхнему допустимому значению сигнала на первых входах формирователей задержанного сигнала 15l…15N. Значение ΔU используется для пошагового уточнения сигнала управления аттенюатором калибровки сигнала 18, при котором |ΔU| входит в окно допуска. На этом заканчивается регулировка затухания аттенюатора 18, запоминается сигнал управления UАТК и находится по таблице соответствующее ему затухание NАТК (поз.35, фиг.6), 5) необходимое затухание сигнала NАТn в аттенюаторах задержанного сигнала 16n, которое вводится на каждый из них через второй вход-выход (поз.36, фиг.6). При этом

где NФЛ - текущее расчетное значение случайной амплитудной флюктуации имитируемого сигнала,

6) сообщается через третий вход-выход вычислителя 21 оператору об окончании калибровки и готовности к боевой работе (поз.36, фиг.6).
С приходом на третий вход-выход вычислителя 21 команды о начале боевой работы вычислитель 21 включает работу формирователей задержанных сигналов 15n, оставляя без изменения начальные настройки, полученные при калибровке сигнала.
Боевая работа имитатора происходит следующим образом. Сигнал моноимпульсной РЛС принимается четвертой антенной 10, поступает через антенный переключатель 11 на аттенюатор калибровки сигнала 18, где ослабляется на выставленную при калибровке величину NАТК. Далее принятый сигнал с помощью пятого смесителя 14 и гетеродинного сигнала, приходящего с синтезатора частоты 23 через делитель мощности 22 на второй вход пятого смесителя 14, переносится на рабочую частоту формирователей задержанных сигналов 15l…15N. В формирователях задержанных сигналов 15l…15N на промежуточной частоте формируются сигналы с установленными ранее исходными данными по задержке сигналов целей, скорости их движения и доплеровскому сдвигу. Выходной сигнал каждого из формирователей задержанных сигналов 15n ослабляется на рассчитанную ранее величину NАТn, дБ, соответствующим аттенюатором задержанного сигнала 16n и через задатчик положения цели 17n с разными весами поступает на четыре сумматора 3, 6, 9 и 13, где суммируется с аналогичными сигналами задатчиков положения других целей 17l…17N, отличающихся задержкой, доплеровской частотой и угловым положением. Вариант структуры задатчика положения цели 17 приведен на фиг.5. Сигналы с выходов первого 3, второго 6, третьего 9 и четвертого 13 сумматоров поступают на соответствующие первый 2, второй 5, третий 8 и четвертый 12 смесители, где с помощью гетеродинного сигнала, приходящего с делителя мощности 22, переносятся на несущую частоту проверяемой РЛС и излучаются параллельно первой 1, второй 4, третьей 7 и четвертой 10 антеннами соответственно. Связь выхода четвертого смесителя с четвертой антенной 10 производится через антенный переключатель 11.
Вариант структуры задатчика положения цели 17 приведен на фиг.5. Работа его производится следующим образом. С вычислителя 21 на вход-выход блока связи 24 приходят текущие коды манипуляции угловых положений излучающих пар антенн П(βА) и значения весов излучаемых антеннами сигналов J1(βA, βЦn) и J2(βА, βЦn), которые выводятся на его третий, первый и второй выходы соответственно. Коды весов сигналов на первом и втором выходах блока связи 24 преобразуются первым 25 и вторым 28 цифроаналоговым преобразователем в аналоговую форму. Задержанный сигнал цели на промежуточной частоте поступает на первый 26 и второй 29 умножители, где умножается на веса с выходов первого 25 и второго 28 цифроаналоговых преобразователей. Полученные сигналы через первый 27 и второй 30 коммутаторы, управляемые сигналом манипуляции П(βА) с третьего выхода блока связи 24, выводятся на первый, третий, второй и четвертый выходы задатчика положения цели 17 в качестве выходных.
В процессе работы вследствие имитации движения целей меняется их дальность и угловые координаты, соответственно, требуемое затухание сигнала NАТn в аттенюаторе задержанного сигнала 16n, значение кода манипуляции углового положения излучающих пар антенн П(βA) и веса сигналов J1(βA, βЦn), вводимых в задатчик положения цели 17n. Необходимые расчеты и уточнение настройки аттенюаторов задержанного сигнала 16l…16N и задатчиков положения цели 17l…17N с учетом текущего положения направления визирования βА, поступающего от РЛС, производятся вычислителем 21 в течение всей боевой работы до получения внешней команды об окончании боевой работы на третьем входе-выходе вычислителя 21.
Техническим преимуществом предлагаемого имитатора цели моноимпульсной РЛС перед прототипом является повышение достоверности имитации сигнала сцены за счет имитации множества подвижных по дальности и углу целей, в том числе протяженных с угловым размером, большим ширины диаграммы направленности РЛС, в расширенном минимум в два раза угловом секторе.
Пользуясь сведениями, представленными в материалах заявки, имитатор радиолокационной цели может быть изготовлен по существующей, известной в радиопромышленности технологии на базе известных комплектующих изделий и использован при проверках моноимпульсной РЛС при стендовых испытаниях.
ЛИТЕРАТУРА
1. Патент США 4521780 от 04.06.85 "Target simulation system".
2. Патент США 5892479 от 06.04.99 "Electromagnetic target generator".
3. Патент России 2317563 от 20.02.08 "Имитатор радиолокационной цели".
4. Ю.М.Перунов и др. Радиоэлектронное подавление информационных каналов систем управления оружием. М.: Радиотехника, 2003 г. (с.171, рис.6.21).
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| СИСТЕМА ВСТРОЕННОГО КОНТРОЛЯ И КАЛИБРОВКИ МОНОИМПУЛЬСНОЙ РЛС | 2011 |
|
RU2459219C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2008 |
|
RU2412449C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| ИМИТАТОР ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2449308C1 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |


Изобретение относится к радиолокации и может быть использовано для исследований процессов обнаружения и сопровождения целей при взаимном перемещении цели и РЛС. В имитаторе формируются задержанные СВЧ сигналы с задержкой относительно зондирующих сигналов РЛС, соответствующей дальности до цели, и сдвигом несущей частоты на величину доплеровского смещения. Полученный сигнал излучается парой пространственно разнесенных антенн, находящихся на дуге окружности с центром, совпадающим с антенной РЛС. Угловой разнос пары излучающих антенн имитатора выбирается равным двойному значению ширины суммарной ДНА моноимпульсной РЛС. Максимум задержанного СВЧ сигнала устанавливается во время калибровки в окне допуска. Соотношение мощностей, излучаемых парой антенн, манипулируемых по угловому положению, перестраивается в соответствии с текущими угловыми положениями цели. Технический результат заключается в повышении достоверности имитации сигналов сцены. 2 н.п. ф-лы, 6 ил.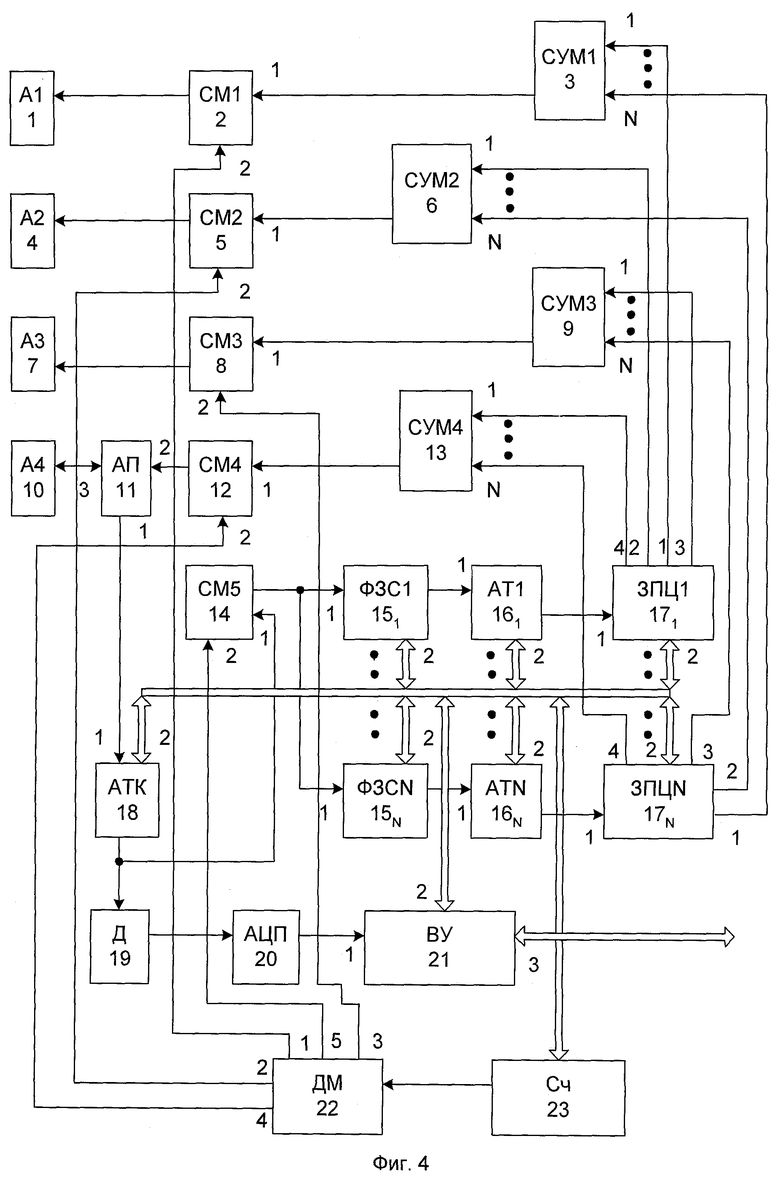
1. Способ имитации радиолокационного сигнала цели моноимпульсной радиолокационной станции (РЛС), заключающийся в том, что в имитаторе формируются задержанные сверхвысокочастотные (СВЧ) сигналы с модуляцией, соответствующей модуляции зондирующих сигналов РЛС, с задержкой относительно зондирующих сигналов РЛС, соответствующей дальности до цели, и сдвигом несущей частоты на величину доплеровского смещения, определяемого радиальной скоростью цели, которые модулируются по амплитуде в соответствии с дальностью, эффективной площадью рассеяния цели и случайными временными флюктуациями, характерными для отражающей цели, полученный сигнал излучается парой пространственно разнесенных антенн, находящихся на дуге окружности с центром, совпадающим с антенной РЛС, в соотношении, определяемом угловым положением цели, центра излучающей пары и направлением визирования РЛС, отличающийся тем, что задержанный СВЧ сигнал получают задержкой зондирующего сигнала РЛС, принятого имитатором, и дополнительным ослаблением на величину, при которой максимум задержанного СВЧ сигнала, соответствующий совпадению направления визирования РЛС с направлением на имитатор, устанавливается во время калибровки в окне допуска, угловой разнос пары излучающих антенн имитатора выбирается равным двойному значению ширины суммарной ДНА моноимпульсной РЛС, при боевой работе местоположение излучающей пары манипулируется по углу на величину, равную половине ширины боковых лепестков суммарной ДНА моноимпульсной РЛС по нулевому уровню, в сторону, где при текущем положении антенны РЛС и направлении на имитируемую цель требуемая излучаемая мощность минимальна, соотношение мощностей, излучаемых парой антенн, манипулируемых по угловому положению, перестраивается в соответствии с текущими угловыми положениями цели, центра манипулируемых пар антенн и направлением визирования РЛС.
2. Устройство имитации радиолокационного сигнала по п.1 содержит первую и вторую антенны, находящиеся на дуге окружности с центром, совпадающим с моноимпульсной антенной радиолокационной станции (РЛС), последовательно соединенные первый формирователь задержанного сигнала, первый аттенюатор задержанного сигнала и первый задатчик положения цели, вычислитель, второй вход-выход которого через магистраль управления соединен с вторыми входами-выходами первого формирователя задержанного сигнала, первого аттенюатора задержанного сигнала и первого задатчика положения цели соответственно, отличающееся тем, что в него дополнительно введены третья и четвертая антенны, находящиеся на той же дуге окружности с тем же угловым разносом, что и первые две антенны, N-1 последовательных соединений, состоящих из n-го формирователя задержанного сигнала, n-го аттенюатора задержанного сигнала и n-го задатчика положения цели, последовательно соединенные первый сумматор и первый смеситель, выход которого соединен с входом первой антенны, последовательно соединенные второй сумматор и второй смеситель, выход которого соединен с второй антенной, последовательно соединенные третий сумматор и третий смеситель, выход которого соединен с входом третьей антенны, последовательно соединенные четвертый сумматор, четвертый смеситель, антенный переключатель, третий вход-выход которого соединен с четвертой антенной, последовательно соединенные синтезатор частоты, делитель мощности и пятый смеситель, выходы делителя мощности с первого по пятый соединены со вторыми входами смесителей, номера которых одноименны номерам соответствующих выходов делителя мощности, последовательно соединенные аттенюатор калиброванного сигнала, детектор и аналого-цифровой преобразователь (АЦП), выход которого подключен к первому входу вычислителя, а первый вход к первому выходу антенного переключателя, при этом первые выходы N задатчиков положения цели соединены с N входами первого сумматора, вторые выходы N задатчиков положения цели соединены с N входами второго сумматора, третьи выходы N задатчиков положения цели соединены с N входами третьего сумматора, четвертые выходы N задатчиков положения цели соединены с N входами четвертого сумматора, второй вход-выход вычислителя через магистраль управления соединен с вторыми входами-выходами аттенюатора калибровки сигнала, синтезатора частоты и всех введенных N-1 формирователей задержанного сигнала, N-1 аттенюаторов задержанных сигналов и N-1 задатчиков положения цели, выход аттенюатора калибровки сигнала соединен с первым входом пятого смесителя, выход которого соединен с первыми входами всех N формирователей задержанного сигнала, третий вход-выход вычислителя является интерфейсным входом-выходом имитатора, по которому вводятся исходные данные о координатах целей и их скоростях, параметрах суммарной и разностной диаграмм направленности антенн РЛС, текущие данные о угловом положении антенны РЛС, вычислитель по полученным исходным данным производит расчет необходимой частоты гетеродина, исходные задержки сигналов имитируемых целей, скорости их изменения, доплеровские сдвиги частот имитируемых сигналов и вводит их в синтезатор частоты и формирователи задержанных сигналов соответственно, вычисляет по результатам сканирования антенны РЛС в режиме калибровки требуемое затухание сигнала в аттенюаторе калибровки сигнала, текущие затухания сигналов в аттенюаторах задержанных сигналов в боевом режиме, текущие сигналы манипуляции излучающих пар антенн и веса излучаемых антеннами сигналов для управления задатчиками положения цели.
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2006 |
|
RU2317563C1 |
| US 4521780 A 04.06.1985 | |||
| US 5892479 A 06.04.1999 | |||
| KR 960016391 B1 11.12.1996. | |||

