Предлагаемое изобретение относится к моноимпульсным обзорным РЛС, работающим на подвижных носителях, предназначенных для обнаружения сигналов целей и выдачи их координат в систему управления, к которым предъявляют повышенные требования к получению выходной информации за минимальное время.
Существуют два подхода к измерению угловых координат целей в моноимпульсных обзорных РЛС [1, с.328]. Первый - прямоотсчетный по измерению отклонения цели от сканирующего равносигнального направления (РСН) в пределах всего рабочего участка пеленгационной характеристики антенны. При этом измеряемый угол в системе координат ЛА равен сумме измеренного угла отклонения от РСН с углом РСН относительно оси ЛА. Второй - компенсационный по положению РСН, когда сигнал углового отклонения от РСН равен нулю.
Недостатком первого способа является то, что при измерениях вне РСН флюктуационная погрешность измерения резко увеличивается с возрастанием отклонения измеряемого угла от РСН [2, с.50]. Кроме того, при не идентичности амплитудных и фазовых характеристик суммарного и разностного каналов крутизна пеленгационной характеристики, даже в суммарно-разностных моноимпульсных РЛС, отличается от расчетной, соответственно появляется дополнительная погрешность смещения показаний, возрастающая с увеличением измеряемого угла, учесть которую трудно. Более высокую точность дает второй - компенсационный способ. Флюктуационная погрешность здесь наименьшая, а погрешность смещения нулевая, так как положение нуля пеленгационной характеристики в суммарно-разностных моноимпульсных РЛС стабильно. Для обеспечения приемлемой точности измерения углового положения цели в этом варианте построения обзорной моноимпульсной РЛС необходимо обеспечить угловой разнос между соседними сеансами измерений (скорость сканирования по углу), меньший части допустимой угловой погрешности измерения. Очевидно, что это снижает скорость сканирования по сравнению с первым (прямоотсчетным) методом измерения.
Известен компенсационный моноимпульсный метод измерения угла, описанный в [3], в котором после обнаружения сигнала во время сканирования и определения, что цель находится в районе главной РСН, производится переход в режим автосопровождения цели по углу, при котором измеряемый угол равен угловому положению РСН. Недостатком способа [3] при обзоре сцены является приостановка обзора при обнаружении цели на время измерения ее угловой координаты в режиме слежения. При этом скорость обзора сцены оказывается еще меньше, чем в рассмотренном выше варианте.
Целью предлагаемого изобретения является повышение точности измерения угловых координат цели компенсационным способом при обзоре сцены при высокой скорости сканирования за счет дополнительного использования оценок углового отклонения ее от РСН на части рабочего участка главной пеленгационной характеристики и определения координаты цели по ним расчетным путем с использованием метода линейной регрессии [4, с.114].
Заявленная цель достигается тем, что в способ измерения углового положения в обзорной суммарно-разностной моноимпульсной РЛС, включающем сканирование заданного углового сектора, начиная от начального до конечного, измерение углового положения РСН относительно оси ЛА βi, формирование пеленгационных отсчетов цели γ(βi), амплитуды суммарного сигнала P(βi), сглаженной реализации Рсгл(βi) путем суммирования выборок P(βi) в скользящем по углу окне, пороговое обнаружение сигнала по превышению сглаженным сигналом Рсгл(βi) порога, определяемого заданной вероятностью правильного обнаружения и допустимой вероятностью ложной тревоги, селекцию нахождения цели на главном участке пеленгационной характеристики антенны и определение угла РСН βц, при котором пеленгационный отсчет на главном участке пеленгационной характеристики равен нулю, введена оцифровка амплитуды суммарного сигнала P(βi) и пеленгационных отсчетов γi=γ(βi), для обнаруженных сигналов производится запись в память значений сглаженного сигнала Рсгл(βi) и пеленга γ(βi) совместно с угловым положением РСН βi, при котором они получены, после достижения РСН конца сектора обзора по результатам записи итерациями находят сигналы целей и их угловые координаты, каждая итерация включает нахождение глобального максимума Рм в сглаженной реализации Рсгл(βi) и его угловой координаты βм, нахождение методом линейной регрессии уравнения прямой, аппроксимирующей поведение пеленга в зависимости от угла РСН  в угловом секторе βм±Δβ, где Δβ - часть ширины главного лепестка суммарной ДНА, вычисление угла РСН, при котором пеленг цели равен нулю (точки пересечения прямой
в угловом секторе βм±Δβ, где Δβ - часть ширины главного лепестка суммарной ДНА, вычисление угла РСН, при котором пеленг цели равен нулю (точки пересечения прямой  с осью абсцисс), найденный угол является угловой координатой цели βц, который записывают в выходной массив результатов измерения, производится вычисление новой реализации сглаженного суммарного сигнала Z(βi), свободной от сигнала цели с координатой найденного глобального максимума βц, путем вычитания из реализации Рсгл(βi) взвешенной нормированной функции суммарной ДНА G(βi), глобальный максимум которой смещен по углу в положение βц, вес вычитаемой функции G(βi) принимается равным значению найденного глобального максимума Рм:
с осью абсцисс), найденный угол является угловой координатой цели βц, который записывают в выходной массив результатов измерения, производится вычисление новой реализации сглаженного суммарного сигнала Z(βi), свободной от сигнала цели с координатой найденного глобального максимума βц, путем вычитания из реализации Рсгл(βi) взвешенной нормированной функции суммарной ДНА G(βi), глобальный максимум которой смещен по углу в положение βц, вес вычитаемой функции G(βi) принимается равным значению найденного глобального максимума Рм:
Z(βi)=Pсгл(βi)-Рм[G(βi+βo-βц)],
где βо - угловое положение глобального максимума опорной функции суммарной ДНА, записанной в память,
Z(βi) - новая реализация накопленной амплитуды суммарного сигнала, повторяют итерационную процедуру с новой реализацией угловой развертки амплитуды сглаженного суммарного сигнала, считая Рсгл(βi)=Z(βi), пока все глобальные максимумы не окажутся ниже второго порога, после этого производится выдача массива найденных в секторе обзора координат целей потребителю.
Согласно данному способу формируется периодический СВЧ сигнал, излучаемый через суммарную диаграмму направленности сканирующей антенны, угловое положение которой (βi) измеряется и выдается для регистрации в память. Отраженный сигнал принимается в паузах между излучениями через ту же антенну и после суммарно-разностного преобразования на несущей частоте поступает на обработку сигнальным процессором для получения амплитуды суммарного сигнала (Pi) и пеленгационного соотношения (γi=Δi/Pi) разности амплитуд сигналов Δi, принятых лучами моноимпульсной антенны, и их суммы Pi. Значение γi может быть и положительным, и отрицательным и характеризует отклонение направления на цель от РСН. Сигналы Pi и γi оцифровываются с периодом излучения зондирующих импульсов на задержке, соответствующей анализируемой дальности. Оцифрованный суммарный сигнал Pi сглаживается (накапливается) на скользящем по углу интервале. В результате сглаживания получают реализацию Рсгл(βi), текущие значения которой сравниваются с порогом обнаружения. При превышении порога формируется отметка об обнаружении сигнала. По этой отметке в каждый период излучения производится запись в память оцифрованных сигналов Рсгл(βi), γ(βi) и значение угла βi, при котором они получены. После окончания цикла обзора сцены в заданном секторе сканирования производится обработка результатов записи с определением угловых положений всех целей в секторе сканирования. Процесс обработки выполняется итерационно. Каждая итерация включает нахождение углового сектора, в котором присутствует хотя бы одна цель в главном лепестке суммарной ДНА, и угла ориентации РСН βц, при котором он совпадает с направлением на цель (пеленгационный отсчет γц=0). Для этого находят глобальный максимум Рм на реализации Рсгл(βi) и его угловую координату βм. На участке βм±Δβ (где Δβ - часть ширины главного лепестка суммарной ДНА, в пределах которой используются выборки γi для вычисления измеряемой угловой координаты цели). На участке βм±Δβ находят N - число записанных выборок сигнала γi, A1=Σγi, А2=Σβi, А3=ΣβiΣγi, A4=Σ(βi)2. В соответствии с методом линейной регрессии [4] находят параметры А и С прямой
 аппроксимирующей поведение пеленгационного отсчета
аппроксимирующей поведение пеленгационного отсчета  от угла РСН β:
от угла РСН β:

По найденным А и С вычисляют угловое положение цели βц, для которого  :
:
βц=-А/С
и записывают координату βц в выходной массив результатов измерения. Далее формируют реализацию Z(βi) путем вычитания из реализации Рсгл(βi) взвешенной нормированной огибающей суммарной ДНА G(βi) при совмещении ее глобального максимума с βц:
Z(βi)=Рсгл(βi)-РмG(βi+βo-βц),
где βо - угловое положение глобального максимума опорной функции суммарной ДНА, записанной в память.
Реализация Z(βi) проверяется на наличие хотя бы одного максимума, превышающего второй порог. В этом случае итерационный процесс продолжается, считая что Рсгл(βi)=Z(βi). Если при проверке реализации Z(βi) не обнаружено ни одного максимума, превысивших второй порог, итерационный процесс считается законченным, при этом массив данных о координатах обнаруженных целей может быть выдан потребителю.
Сущность изобретения поясняется дальнейшим описанием и чертежами обзорной моноимпульсной РЛС, реализующей данный способ:
Фиг.1 - структурная схема РЛС,
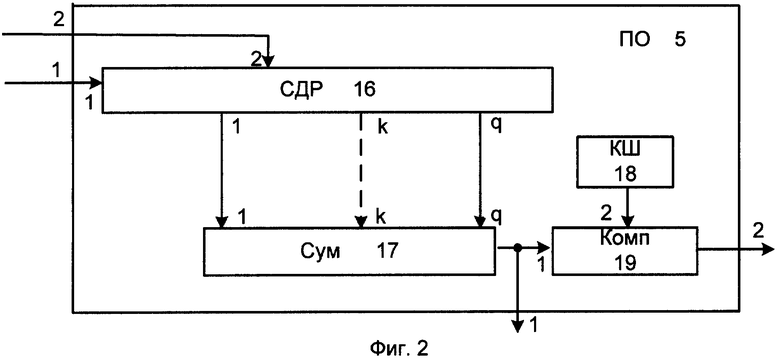
Фиг.2 - структурная схема порогового обнаружителя,
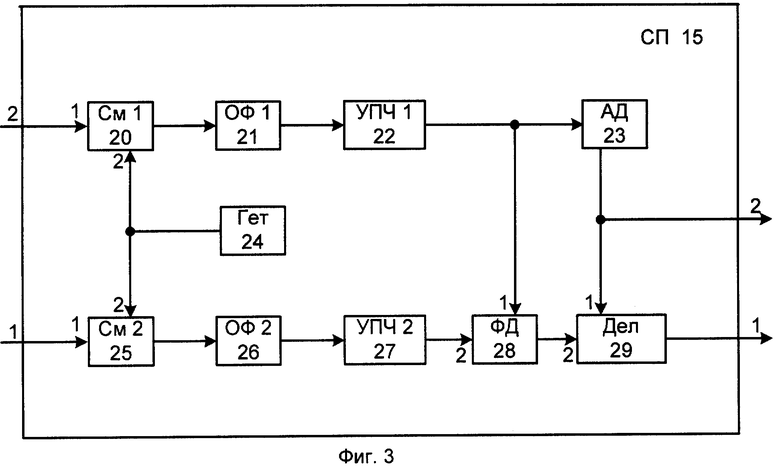
Фиг.3 - структурная схема сигнального процессора,
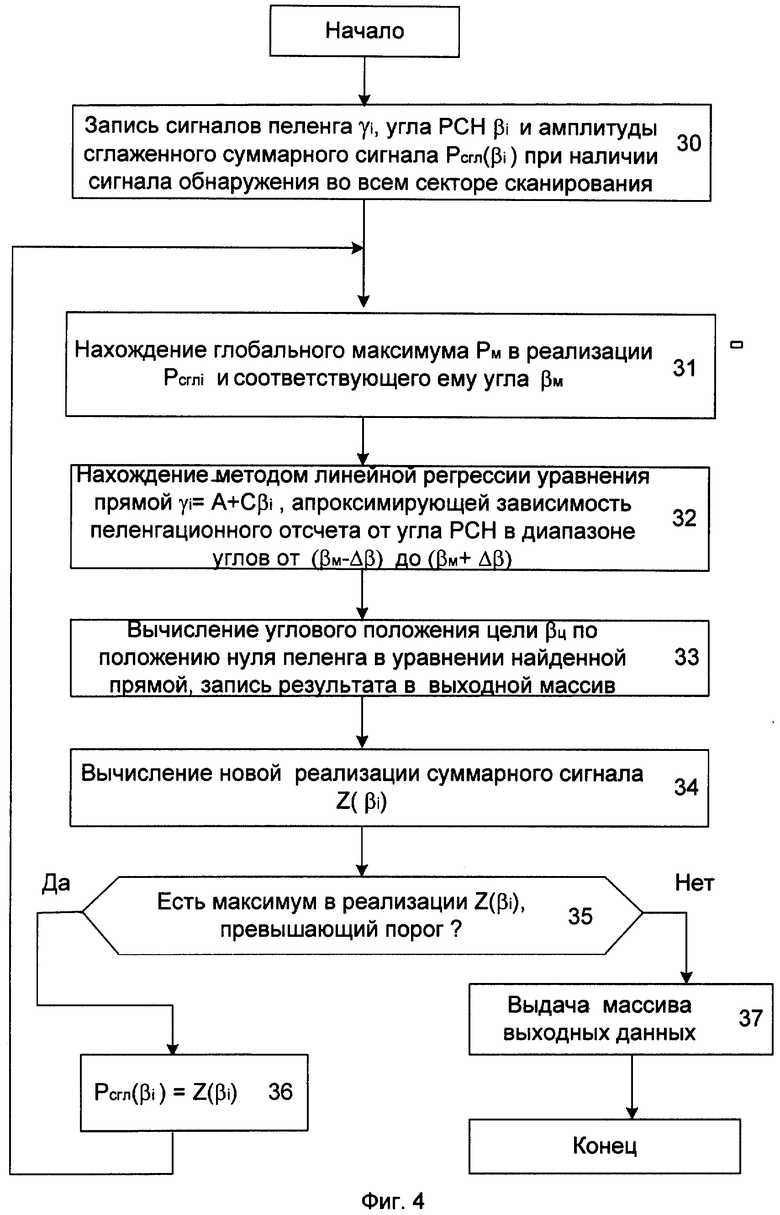
Фиг.4 - алгоритм работы РЛС,
Фиг.5 - алгоритм вычисления угловой координаты цели.
На фиг.1 представлена структурная схема РЛС, где приняты следующие обозначения:
1 - обзорная моноимпульсная РЛС (ОМРЛС),
2 - мультиплексор (МП),
3 - первый аналого-цифровой преобразователь (АЦП 1),
4 - второй аналого-цифровой преобразователь (АЦП 2),
5 - пороговый обнаружитель (ПО),
6 - оперативное запоминающее устройство (ОЗУ),
7 - схема управления (СУ),
8 - постоянное запоминающее устройство (ПЗУ),
9 - вычислитель координат (ВК),
10 - антенна (А),
11 - суммарно-разностный преобразователь (СРП),
12 - антенный коммутатор (АК),
13 - передатчик (ПРД),
14 - привод антенны (ПА),
15 - сигнальный процессор (СП).
Пороговый обнаружитель 5 может быть выполнен по известной схеме, описанной в [6, с.181, рис.2.3].
Схема управления 7 и вычислитель координат 9 могут быть построены на базе цифрового процессора. Работа вычислителя 9 состоит в последовательном решении задач, представленных алгоритмами на фиг.4 и 5.
Антенна 10 может быть построена в виде зеркала с 2-рупорным облучателем, соединенным волноводами с суммарно-разностным преобразователем 11.
Суммарно-разностный преобразователь 11 может быть построен на основе волноводных Т-мостов.
Антенный коммутатор 12 может быть выполнен в виде трехплечевого ферритового Y-циркулятора и служит для защиты сигнального процессора 15 от перегрузки при излучении.
Сигнальный процессор 15 может быть выполнен по схеме, приведенной в [5, с.28, рис 1.13].
На схеме по фиг.1 первый выход ОМРЛС 1 соединен с вторым входом мультиплексора 2 и вторым входом схемы управления 7, пятый выход которого соединен с первым входом вычислителя координат, второй и третий выходы ОМРЛС 1 соединены с первыми входами первого 3 и второго 4 аналого-цифровых преобразователей (АЦП) соответственно, выход второго АЦП 4 соединен с первым входом порогового обнаружителя 5, шестой выход схемы управления соединен с вторыми входами порогового обнаружителя, первого 3 и второго 4 АЦП, выход первого АЦП 3 соединен с первым входом мультиплексора 2, выход которого соединен с третьим входом ОЗУ 6, первый выход порогового обнаружителя 5 соединен с четвертым входом мультиплексора 2, четвертый (адресный) выход схемы управления 7 соединен с первым (адресным) входом ОЗУ 6 и третьим (адресным) входом мультиплексора 2, третий (управляющий) выход схемы управления 7 соединен с вторым входом ОЗУ 6, второй выход порогового обнаружителя 5 соединен с первым входом схемы управления 7, первый и второй выходы которой соединены с вторым и первым входами ОМРЛС 1, третий выход вычислителя координат 9 соединен с шестым входом ОЗУ 6, первый выход вычислителя координат 9 соединен с четвертым входом ОЗУ 6 и первым входом ПЗУ 8, второй (управляющий) выход вычислителя координат 9 соединен с вторым входом ПЗУ 8 и пятым входом ОЗУ 6, выходы ОЗУ 6 и ПЗУ 8 через общую магистраль подключены к второму входу вычислителя координат 9, ОМРЛС 1 содержит последовательно соединенные передатчик 13, антенный коммутатор 12, суммарно-разностный преобразователь 11 и антенну 10, второй (разностный) выход суммарно-разностного преобразователя 11 соединен с первым входом сигнального процессора 15, второй выход антенного коммутатора 12 соединен с вторым входом сигнального процессора, первый и второй выходы которого являются вторым и третьим выходами ОМРЛС 1 соответственно, второй выход привода антенны 14 кинематически связан с третьим входом антенны 10, первый выход привода антенны 14 является первым выходом ОМРЛС 1, вход привода антенны 14 является вторым входом ОМРЛС 1.
На фиг.2 приведен вариант схемы порогового обнаружителя 5, на котором обозначены:
1 - сдвиговый регистр(СДР),
2 - сумматор (Сум),
3 - кодовая шина (КШ),
4 - компаратор (Комп).
На схеме фиг.2 второй вход порогового обнаружителя 5 соединен с вторым входом сдвигового регистра 16, выходы которого с первого по q-ый соединены с одноименными входами сумматора 17, первый вход сдвигового регистра 16 является первым входом порогового обнаружителя 5, выход сумматора 17 соединен с первым входом компаратора 19 и является первым выходом порогового обнаружителя 5, второй вход которого соединен с выходом кодовой шины 18, выход компаратора 19 является вторым выходом порогового обнаружителя 5.
Вариант схемы сигнального процессора 15 приведен на фиг.3, на которой обозначены:
20 - первый смеситель (См 1),
21 - первый оптимальный фильтр (ОФ 1),
22 - первый усилитель промежуточной частоты (УПЧ 1),
23 - амплитудный детектор (АД),
24 - гетеродин (Гет),
25 - второй смеситель (См 2),
26 - второй оптимальный фильтр (ОФ 2),
27 - второй усилитель промежуточной частоты (УПЧ 2),
28 - фазовый детектор (ФД),
29 - делитель (Дел).
На фиг.3 второй вход сигнального процессора 15 через последовательно соединенные первый смеситель 20, первый оптимальный фильтр 21, первый УПЧ 22 и амплитудный детектор 23 соединен с вторым выходом сигнального процессора 15, первый вход сигнального процессора 15 через последовательно соединенные второй смеситель 25, второй оптимальный фильтр 26, второй УПЧ 27, фазовый детектор 28 и делитель 29 соединен с первым выходом сигнального процессора 15, выход гетеродина 24 соединен с вторыми входами первого и второго смесителей 20 и 25 соответственно, выход первого УПЧ 22 дополнительно соединен с первым входом фазового детектора 28, выход амплитудного детектора 23 дополнительно соединен с первым входом делителя 29.
В соответствии со схемами на фиг.1...5 РЛС, реализующая предлагаемый способ, работает следующим образом. Перед началом работы РЛС по команде управления на первом выходе схемы управления 7, поступающей на второй вход привода антенны 14, антенна 10 разворачивается в сторону начала сектора сканирования. Ее угловое положение, выдаваемое на первом выходе привода антенны 10, поступает на второй вход схемы управления 7, где сравнивается с заданным углом начала сектора сканирования, при подходе оси РСН к заданному началу сектора система управления 7 выдает на передатчик 13 импульсы запуска, синхронизирующие формирование им зондирующего импульса. Сформированный передатчиком 13 зондирующий импульс через последовательно включенные антенный коммутатор 12 и суммарно-разностный преобразователь 11 поступает на первые и вторые входы-выходы антенны 10 и излучается через суммарную диаграмму направленности антенны (ДНА). Отраженный сигнал через ту же антенну 10 принимается и поступает на суммарно-разностный преобразователь 11, где на первом и втором выходах формируются суммарный и разностный сигналы соответственно. Суммарный сигнал через антенный коммутатор 12 поступает на второй вход сигнального процессора 15. Разностный сигнал с второго выхода суммарно-разностного преобразователя 11 поступает на первый вход сигнального процессора 15. В результате обработки суммарных и разностных сигналов на первом выходе сигнального процессора 15 формируется пеленгационное отношение γi=Δi/Pi, а на втором - огибающая суммарного сигнала Pi. Вариант построения сигнального процессора 13 описан в [5, с.28, рис 1.13] и изображен на фиг.3. Здесь суммарный и разностный сигналы поступают на первый 20 и второй 25 смесители соответственно. Гетеродин 24 формирует сигнал, который поступает на вторые входы смесителей 20 и 25. В результате смешения входных сигналов с гетеродинным образуется промежуточная более низкая, на которой производится оптимальная фильтрация входных сигналов в фильтрах 21 и 26 и далее усиление в первом 20 и втором 27 УПЧ. Фазовое детектирование (перемножение) сигналов УПЧ дает сигнал, пропорциональный отклонению направления на цель от РСН. После его нормировки сигналом амплитудного детектора 23 огибающей суммарного сигнала на выходе делителя 29 получают пеленгационный отсчет. Выходом сигнального процессора 15 являются выход делителя 29 (сигнал γi) и амплитудного детектора 23 (сигнал Pi). Эти сигналы оцифровываются в первом 3 и втором 4 АЦП соответственно. Такт выборки сигналов задается сигналом с шестого выхода схемы управления 7, имеющим задержку относительно импульса запуска передатчика, соответствующую задержке отраженного сигнала на анализируемой дальности. С выхода второго АЦП 4 оцифрованный суммарный сигнал поступает на первый (информационный) вход порогового обнаружителя 5. Схема порогового обнаружителя 5 описана в [6, с.181, рис.2.36], приведена на фиг.2 и работает следующим образом. На информационный первый вход сдвигового регистра 16 приходит оцифрованный сигнал огибающей суммарного канала. Прием сигнала в сдвиговый регистр16 производится сигналом выборки, поступающим на его второй вход. Число разрядов сдвигового регистра равно q - числу не когерентно накапливаемых импульсов, по которым принимается решение об обнаружении сигнала. Сигналы с q выходов сдвигового регистра 16 поступают в сумматор 17, где на скользящем интервале формируется накопленный (сглаженный) сигнал Рсгл(βi), поступающий на первый вход компаратора 19, и является первым выходом порогового обнаружителя 5. При превышении накопленным (сглаженный) сигналом порога, задаваемого кодовой шиной 18, компаратор 19 выдает на первый вход схемы управления 7 признак обнаружения сигнала. При наличии обнаружения схема управления 7 один раз в период повторения производит последовательную запись оцифрованных сигналов пеленга (выход первого АЦП 3), сглаженной амплитуды суммарного сигнала (первый выход порогового обнаружителя 5) и угла ориентации РСН (первый выход привода антенны 14) в ОЗУ 6 через мультиплексор 2. Адрес для ОЗУ и мультиплексора 2 формируется на четвертом выходе схемы управления 7. Сигнал управления ОЗУ 6 для управления моментом записи формируется на третьем выходе схемы управления 7.
В процессе сканирования схема управления 7 считывает текущий угол РСН, поступающий на его второй вход. При достижении конца заданного сектора сканирования схема управления 7 прекращает подачу импульсов запуска с второго выхода на передатчик 13 (прекращает излучение зондирующих импульсов) и выдает на пятом выходе сигнал разрешения обработки записанной информации, поступающий на первый вход вычислителя координат 9. С этого момента вычислитель координат 9 начинает работать с информацией, записанной в ОЗУ 6 и ПЗУ 8. Адрес запрашиваемых ячеек ОЗУ 6 и ПЗУ 8 задается на первом выходе вычислителя координат 9. Управление работой при записи/считывании информации из ОЗУ 6 и ПЗУ 8 производится с второго выхода вычислителя координат 9. Информация с выходов ОЗУ 6 и ПЗУ 8 приходит на второй вход вычислителя координат 9 через общую магистраль. В ПЗУ 8 записана огибающая суммарной ДНА, используемая в расчетах. Выходная информация, полученная в ходе расчетов, подлежащая записи в ОЗУ 6, формируется на третьем выходе вычислителя координат 9 и поступает на шестой вход ОЗУ 6. Алгоритм работы вычислителя координат 9 приведен на фиг.4 (поз.31...37). Алгоритм, раскрывающий работу вычислителя координат 9 на поз.32 и 33, приведен на фиг.5.
Таким образом, обзорная моноимпульсная РЛС, реализующая заявляемый способ, осуществляет измерение угловых координат целей, находящихся в секторе обзора.
Эффект применения этого способа заключается в том, что за счет использования всех пеленгационных отсчетов, находящихся в пределах найденного углового сектора главной суммарной ДНА, обеспечивается более высокая точность, чем в РЛС аналогичного назначения, определяющих угловое положение цели по моменту, когда во время сканирования с высокой скоростью один пеленгационный отсчет окажется равным нулю или вблизи от него. При этом дисперсия погрешности измерения будет определяться двумя составляющими (шумовой σш 2 и дискретностью положения оси РСН между соседними измерениями σд 2): σ2=σш 2+σд 2. Вес σд 2 в общей погрешности увеличивается с увеличением скорости сканирования.
В предлагаемом устройстве за счет усреднения N пеленгационных отсчетов, полученных в секторе Δβ, шумовая составляющая уменьшится и будет равна σш 2/N, а σд 2 исчезнет за счет определения расчетным путем положения точки пересечения аппроксимированной по N измерениям пеленгационной прямой оси абсцисс (оси углового положения РСН).
На основании приведенного описания и чертежей предлагаемое устройство может быть изготовлено при использовании известных комплектующих изделий, известного в радиоэлектронной промышленности технологического оборудования и использовано на подвижных носителях в качестве обзорной РЛС, где предъявляются высокие требования к точности измерения угла при повышенной скорости обзора.
В соответствии с материалами заявки было проведено моделирование и изготовлен опытный образец устройства, испытания которого подтвердили указанный в материалах заявки технический эффект.
ЛИТЕРАТУРА
1. Дудник П.И. Авиационные радиолокационные устройства. М: изд. ВВИА им Жуковского, 1976 г. (с.328).
2. Дудник П.И. Моноимпульсные радиолокационные устройства. Итоги науки и техники. Радиотехника, т.3, М. 1972 (с.50).
3. Патент США №3943512 от 09.03.1976 г., кл. G 01 S 9/22. Sidelobe lock-on discriminating method for search-track monopulse radar.
4. Дж.Бендат, А.Пирсол. Прикладной анализ случайных данных. М.: изд. Мир, 1989 г. (с.114).
5. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: Советское радио, 1970 г. (с.28. рис 1.13).
6 В.А.Лихарев. Цифровые методы и устройства в радиолокации. М.: Советское Радио, 1973 (с.181, рис.2.36).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОГО СИГНАЛА МОНОИМПУЛЬСНОЙ РЛС | 2008 |
|
RU2391682C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| СИСТЕМА ВСТРОЕННОГО КОНТРОЛЯ И КАЛИБРОВКИ МОНОИМПУЛЬСНОЙ РЛС | 2011 |
|
RU2459219C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |

Изобретение относится к моноимпульсным обзорным РЛС, работающим на подвижных носителях, предназначенных для обнаружения целей и выдачи их координат в систему управления, к которым предъявляют повышенные требования к получению выходной информации за минимальное время. Техническим результатом изобретения является повышение точности измерения угловых координат цели компенсационным способом при обзоре сцены с высокой скоростью сканирования. Указанный результат реализуется за счет порогового обнаружения сигналов и последующей записи их в память, включая амплитуду суммарного канала, пеленг цели и угол ориентации РСН, на котором они получены при сканировании, после обзора заданного сектора сцены в процессе итерационной обработки записанных данных определяется угловой сектор ориентации РСН, в пределах которого методом линейной регрессии находится аппроксимация прямой, описывающей поведение пеленга цели в зависимости от углового положения РСН, и координата цели как точка пересечения этой прямой с осью абсцисс. 2 н.п. ф-лы, 5 ил.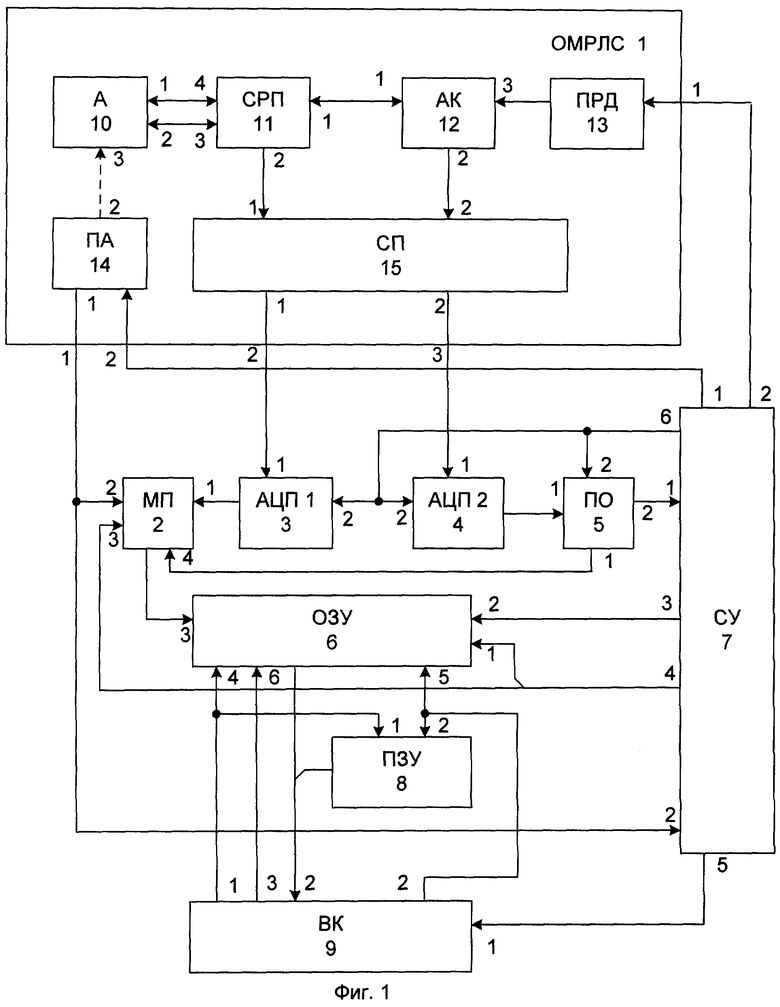
 βi в угловом секторе βм±Δβ, где Δβ - часть ширины главного лепестка суммарной ДНА, вычисление угла РСН, при котором пеленг цели равен нулю (точки пересечения прямой
βi в угловом секторе βм±Δβ, где Δβ - часть ширины главного лепестка суммарной ДНА, вычисление угла РСН, при котором пеленг цели равен нулю (точки пересечения прямой  (β) с осью абсцисс), найденный угол является угловой координатой цели βц, который записывают в выходной массив результатов измерения, производится вычисление новой реализации сглаженного суммарного сигнала Z(βi), свободной от сигнала цели с координатой найденного глобального максимума βц, путем вычитания из реализации Рсгл(βi) взвешенной нормированной функции суммарной диаграммы направленности антенны (ДНА) G(βi), глобальный максимум которой смещен по углу в положение βц, вес вычитаемой функции G(βi) принимается равным значению найденного глобального максимума Рм:
(β) с осью абсцисс), найденный угол является угловой координатой цели βц, который записывают в выходной массив результатов измерения, производится вычисление новой реализации сглаженного суммарного сигнала Z(βi), свободной от сигнала цели с координатой найденного глобального максимума βц, путем вычитания из реализации Рсгл(βi) взвешенной нормированной функции суммарной диаграммы направленности антенны (ДНА) G(βi), глобальный максимум которой смещен по углу в положение βц, вес вычитаемой функции G(βi) принимается равным значению найденного глобального максимума Рм:
Z(βi)=Рсгл(βi)-Рм[G(βi+βo-βu)],
где βо - угловое положение глобального максимума опорной функции суммарной ДНА, записанной в память,
Z(βi) - новая реализация накопленной амплитуды суммарного сигнала, повторяют итерационную процедуру с новой реализацией угловой развертки амплитуды сглаженного суммарного сигнала, считая Pсгл(βi)=Z(βi), пока все глобальные максимумы не окажутся ниже второго порога, после этого производится выдача массива найденных в секторе обзора координат целей потребителю.
| US 3943512, 09.03.1976 | |||
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 1979 |
|
RU2030760C1 |
| НАЗЕМНАЯ ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АЭРОПОРТА И РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2115141C1 |
| US 4568940 А, 04.02.1986 | |||
| Устройство для определения места повреждения на линиях электропередачи | 1976 |
|
SU577479A1 |
| ЦИФРОВОЙ ФАЗОМЕТР ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ СДВИГА ФАЗ | 0 |
|
SU381038A1 |

