(54) МИКРОМАНИПУЛЯТОР
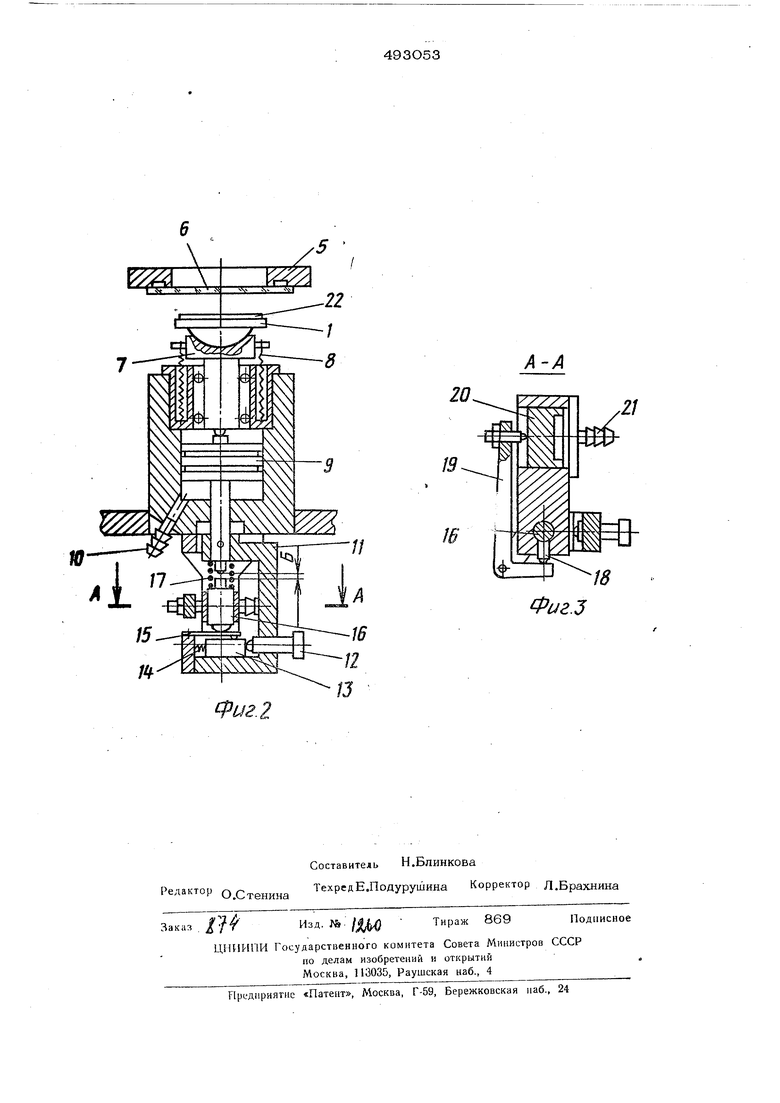
Шток 9 пневмоцилиндра служит для перемещения ползуна 7 вверх при помощи сжатого возщха подаваемого через штуцер 10. На щтоке 9 жестко закреплен кронштеин 11с вмонтированным в него микрометрическим винтом 12, На нижней площадке кронщтейна 11 в направляющих установлена клинообразная пластина 13, поджимаемая постоянно к микрометрическому винту 12 пружиной 14. К скосу клинообразной пластины 13 поджата плоская пружина 15, на плоскости которой размещен свободно установленный в направляющих толкатель 16, связанный с кронштейном посредством пружины 17. Толкатель 16 фиксируется в верхнем положении посредством тормозного элемен- та 18, поджимаемого к боковой поверхности толкателя двуплечим рычагом 19, для перемещения которого служит пневмоцилиндр 20, а штуцер 21 служит для подачи сжатого воздуха в штоковую полость пнев моцилиндра 20.
Зазор совмещения Б определяется расстоянием между нижней плоскостью штока 9 и верхней плоскостью толкателя
16.
Перед началом работы микроманипулятора полупроводниковая пластина 22 укладывается на полусферический пластинодержатель 1, а фотошаблон 6 фиксируется на шаблонодержателе 5.
Через штуцер 10 в штоковую полость пневмоцилиндра подается сжатый воздуХ)И шток 9 перемещается вверх, сообщая движение ползуну 7, на котором закреплен пластинодержатель 1| В результате пластина 22 прижимается к фотошаблону 6, Вместе со штоком 9 перемещается также и кронштейн 11 с микрометрическим винтом 12, клинообразной пластиной 13 и толкателем 1.6.
После того как пластина 22 прижметс к фотошаблону 6, через штуцер 21 подается сжатый воздух в штоковую полость цилиндра 20, который перемещает двуплечи рычаг 19 вокруг его оси. Рычаг 19 воздействует на тормозной элемент 18. Последний прижимается к боковой поверхности толкателя 16 и фиксирует тем самым его положение.
Фиксированным положением толкателя ;16 определяется зазор совмещения Б. ,,Регулирование этого зазора осуществляется посредством микрометрического винта 12, который перемещает клинообразную : пластину 13, а та в свою очередь через плоскую пружину 15 перемещает толкатель 16. При заворачивании микрометрического винта 12 зазор совмещения Б уменьшается, при выворачивании увеличи
вается. Поскольку толкатель 16 находится в зафиксированном положении в момент при- жатия пластины 22 к фотошаблону 6, то после подачи сжатого воздуха в штоковую полость пневмоцилиндра шток 9 опускается на величину Б. В,это же время пружины 8 перемещают ползун 7 к штоку 9, благодаря чему между пластиной 22 и фо- тощаблоном 6 образуется зазор совмещения Б.
Предмет изобретения
Микроманипулятор, преимуществб 1шо для устройств прецизионного совмещения при изготовлении полупроводниковых микросхем, содержащий пластино держатель, механизм перемещения пластинодержателя в двух взаимно перпендикулярных в горизонтальной плоскости направляющих, механизм поворота пластин вокруг вертикаль ной оси, механизм перемещения пластино- держателя в вертикальной плоскости, снабженный направляющими и выполненный в виде ползуна, кинематически соединенного с микрометрическим винтом, и клинообразной пластины, тормозной элемент и приводной механизм, отличающийся тем, что, с целью повышения плавности изменения зазора совмещения, механизм перемещения пластинодержате;ш в вертикальной плоскости снабжен размешелным в направляющих толкателем и двуплечим рычагом, одно плечо которого взаимодействует с приводным механизмом, а другое с толкателем посредством тормозного элемента, причем толкатель кинематически соединен с микрометрическим винтом посредством клинообразной пластины и с ползуном.
шл.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМАНИПУЛЯТОРЕ?СЕООЮ'^Н'*Я пйтг"'':;и..г'"'^''- ;•'•••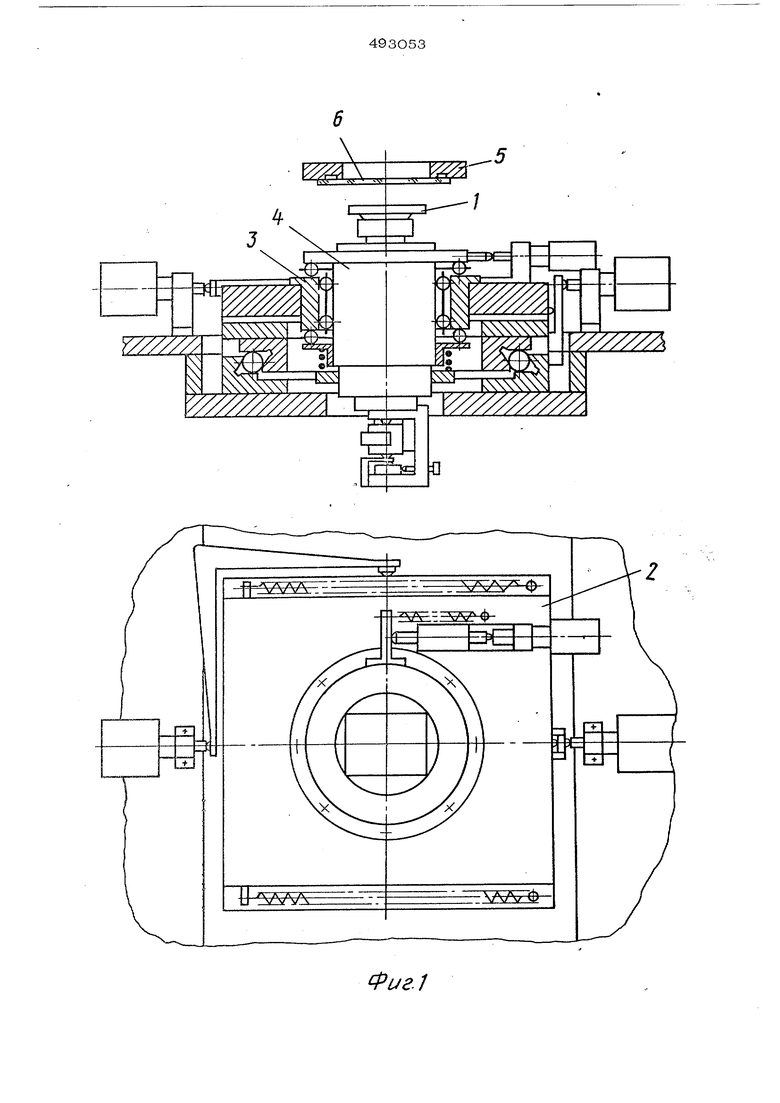
г/
иг.2
А-А
Фиг.:5
