Предлагаемое изобретение относится к области технической кибернетики в части способов осуществления комплексного контроля состояния многопараметрических объектов (динамических систем, процессов) по разнородной измерительной информации и может быть использовано в автоматизированных экспертных системах обработки и анализа телеметрической информации многопараметрического объекта.
Известен способ контроля и оценки технического состояния многопараметрического объекта по данным телеметрической информации [Россия, патент №2099792, МПК G08C 15/06, 1997], в котором предлагается на экран видеомонитора одновременно выдавать весь поток телеметрической информации о состоянии объекта в виде матрицы [n×t], где n - количество телеметрируемых параметров, t - время их регистрации, а амплитуду телеметрических сигналов представляют в цветовом коде видимого спектра, что позволяет, используя принцип пространственно-временной зависимости регистрируемых процессов, однозначно оперативно определить источник и место возникновения возмущения на телеметрируемом объекте.
Недостатком данного способа является то, что в данном способе существует ограничение на применение существующих бортовых телеметрических систем без их доработки, а также не достаточно концентрируется внимание обслуживающего персонала и руководителей работ на процессах объекта и его компонентов, которые могут быть причиной отклонений, нештатных ситуаций и аварий.
Наиболее близким аналогом (прототипом) заявленного способа является способ комплексного контроля состояния многопараметрического объекта по разнородной информации [Россия, патент №2459245, МПК G06F 19/00, 2011], заключающийся в оперативном преобразовании результатов допусковой оценки параметров в соответствующие информационные цветовые сигналы видимого спектра в зависимости от результатов допусковой оценки, факта и направления изменения динамического параметра с обобщением по всему множеству параметров на заданном временном интервале и их отображении посредством цветокодовой матрицы-диаграммы, на основе которой формируют матрицу состояния многопараметрического объекта контроля, количество и номера элементов которой соответствуют количеству и номерам контролируемых параметров объекта, при этом элементам матрицы присваивают вычисленные значения признаков соответствия, после чего формируют цветографическую форму, представляющую собой сформированную в полярной системе координат фигуру, которую интерпретируют как образ состояния объекта контроля в момент окончания измерений (в момент идентификации нештатной ситуации) в заданном временном интервале.
Предложенный способ реализуется устройством [Россия, патент №2417442, МПК G06N 7/02, 2008], который включает устройство ввода данных, мультиплексор, обученную нейронную сеть и устройство вывода данных, причем входная информация поступает на входы устройства ввода данных, которое соединено последовательно с мультиплексором, выходы которого подсоединены к входам нейронной сети, а выходы нейронной сети подсоединены к входу устройства вывода данных, вход которого является входом устройства, отличающийся тем, что обученная нейронная сеть состоит из фрагментов (доменов), реализующих правила нечеткой логики, некоторого числа резервных доменов и домена с возможностью выполнения функции арбитра, который коммутирует выходы доменов с выходами нейронной сети с учетом показателя качества управления.
Недостатками известных технических решений (прототипов) являются:
- низкая эффективность, заключающаяся в отсутствии оперативного обнаружения нештатной ситуации и причин ее возникновения;
- ограниченная возможность визуализации оценки отклонения процессов на объекте с целью выявления схожих признаков нештатных ситуаций.
Целью (техническим результатом) заявленного технического решения является повышение эффективности и расширение возможностей визуализации оценки отклонения процессов на объекте, обеспечивающих:
- повышение полноты обнаружения нештатных ситуаций и причин ее возникновения;
- сокращение сроков анализа телеметрической информации;
- комплексное повышение качества работ при отклонениях от нормального хода процессов на контролируемом объекте;
- более полную информационную поддержку персонала за счет накопления данных в базе нештатных ситуаций.
Цель достигается реализацией заявленного способа с помощью:
- оперативного преобразования результатов допусковой оценки параметров в соответствующие информационные цветовые сигналы видимого спектра в зависимости от результатов допусковой оценки, факта и направления изменения динамического параметра;
- обобщения значения параметров по всему множеству параметров на заданном временном интервале для переноса физического значения параметра в область допустимой относительной оценки;
- формирования матрицы состояний многопараметрического объекта контроля, количество и номера элементов которой соответствуют количеству и номерам контролируемых параметров объекта, причем элементам матрицы присваивают вычисленные значения признаков соответствия;
- формирования (отображения) цветографической формы (фигуры), которую представляют в полярной системе координат и интерпретируют как образ состояния объекта контроля в момент окончания измерений или в момент идентификации нештатной ситуации в заданном временном интервале.
Представленный способ отличается от известного наличием и последовательностью выполнения новых действий.
1) Преобразование (ввод) результатов функционирования каждой i группы параметров агрегатов или узлов объекта относительным многомерным параметрическим пространством, в котором:
- ноль на оси измерения устанавливают при нахождении параметра в «норме»,
- отклонение от нормы этой группы представляют длиной вектора группы в параметрическом пространстве и положением параметра относительно эталона на оси измерения в «минусовой», или «нулевой», или «плюсовой» областях.
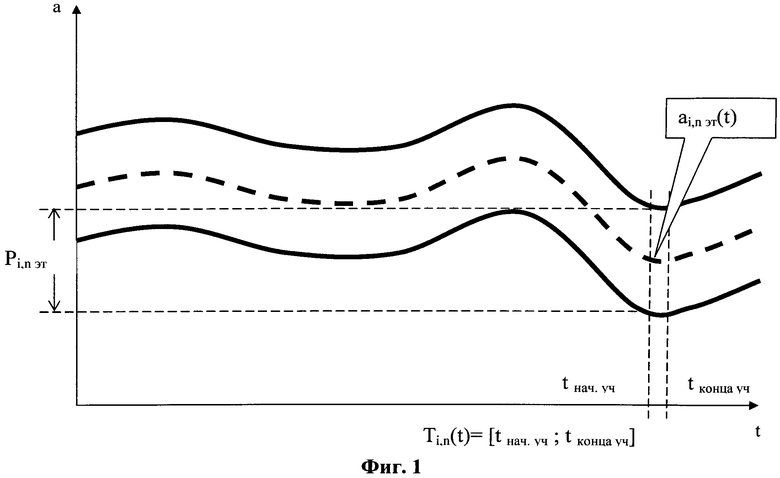
Вектор определяют функцией отклонения Ai,n(t), при которой каждый параметр ai,n(t) в каждый момент времени статистически анализируют, для чего задают интервал Ti,n(t), вычисляют математическое ожидание ami,n(t), сравнивают с эталоном, который определяют кортежем [математическое ожидание эталонного значения на интервале Ti,n(t), амплитуда эталонного значения на интервале Ti,n(t), Ti,n(t)], кортеж хранится на сервере в базе знаний для проведения вычислений непрерывной аналоговой функции отклонения:
Ai,n(t)=2(ami,n(Ti,n(t))-ai,n эт(Tn(t)))/Pi,n эт(Ti,n(t)),
где ai,n эт(Ti,n(t) - математическое ожидание эталонного значения на интервале Ti,n(t);
Pi,n эт(Ti,n(t)) - амплитуда эталонного значения на интервале Ti,n(t);
i=1…k, k - количество групп параметров агрегатов или узлов объекта;
n=1…Ni, Ni - количество параметров в группе i.
Для каждой группы параметров ai,n(t), относящейся к узлу или агрегату (i=1…k), в каждый момент времени вычисляют вектор отклонения 

2) После определения вектора формируют двухуровневую локализацию неисправности, при которой:
- на первом уровне визуализации формируют графический образ изделия по группам, объединяют параметры в i=1…k групп по агрегатам и узлам с числом параметров n=1…Ni, анализируют длину векторов групп, выделяют группы с векторами длиной больше единицы первым цветом видимого света - «не норма», с иной длиной вектора - вторым цветом видимого спектра;
- для групп «не норма» запускают второй уровень локализации, для которого используют элементы теории нечеткой логики, для чего проводят фазификацию, т.е. вычисляют матрицу состояний многопараметрического объекта контроля, являющуюся матрицей-системой дискретных характеристик ADi,n(t) контролируемого объекта:
где aq - пороговое значение функции отклонения.
При необходимости по представленному принципу можно создать любое количество дискретных состояний, в простейшем случае в качестве порогового значения может быть выбран один коэффициент, равный «1», при этом aq+1=∞, или вычисляют нечеткую матрицу дискретных характеристик
где q=1…Q - количество дискретных состояний фазификации.
Что аналогично следующей записи: ячейке матрицы ADi,n(t) присваивают значение ноль, если функция отклонения Ai,n(t) больше отрицательного, но меньше положительного значения первого коэффициента порогового отклонения функции отклонения, присваивают значение q, если функция отклонения Ai,n(t) больше или равна положительному значению текущего коэффициента порогового отклонения функции отклонения, но меньше положительного значения последующего коэффициента порогового отклонения функции отклонения, присваивают значение -q, если функция отклонения Ai,n(t) меньше или равна отрицательному значению текущего коэффициента порогового отклонения функции отклонения, но больше отрицательного значения последующего коэффициента порогового отклонения функции отклонения.
3) По длине вектора группы и положению на дискретной оси системы дискретных характеристик контролируемого объекта определяют, насколько существенна аномалия, приводит ли она к нештатной ситуации и какой конкретно по анализу принадлежности нечеткому множеству нештатных ситуаций Mj={Adi,n(t), m(Adi,n(t))}, где j=1…I, для чего вектор ADi,n(t) преобразуют в нечеткий вектор {Ai,n(t), m(Adi,n(t))} в соответствии со значением ADi,n(t) и количеством дискретных состояний фазификации, оценку производят путем нечеткого вывода по накопленной информации из сервера базы знаний нештатных ситуаций известными методами с использованием аппарата теории нечетких множеств (нечеткой логики).
4) Проводят дефазификацию, для чего:
- находят весовые коэффициенты kj матрицы коммутации kmi для каждой i-й группы параметров (подсистемы) - блока нечеткого вывода. Весовые коэффициенты каждой i-й группы параметров можно найти известными способами, например относительно среднего центра по формуле:
где ADcj - центр j-го нечеткого правила;
m(ADcj) - соответствующая функция принадлежности;
- элементам матрицы коммутации каждой i-й группы присваивают весовые коэффициенты kj по первому измерению и индекс Ind нештатной ситуации по второму, при этом общее количество индексов Ind равно I;
- находят наибольший коэффициент Kmi=max(kj) в каждой матрице коммутаций kmi, из второго измерения матриц коммутаций выбирают индекс нештатной ситуации нештатной ситуации Ind.
5) Формируют последовательность рекомендаций по выходу из нештатной ситуации, в соответствии с индексом нештатной ситуации Ind из базы знаний, на устройствах вывода. Кроме того, эксперт на устройствах вывода имеет возможность оценить идентифицированную нештатную ситуацию графически, для чего систему дискретных характеристик контролируемого объекта характеризуют положением группы параметров в Ni-мерном пространстве в радиальной системе координат, которое графически изображают в виде звезды осей Ni-мерного пространства, которые соединяют в точке «минусовой области» с радиальным шагом, равным 360/Ni градусов, на осях Ni-мерного пространства, фиксируют относительное положение каждого параметра в виде точки (метки) на оси, полученную конфигурацию оценивают визуально, если конфигурация этого пространства - правильная окружность, то агрегат находится в штатном состоянии, в противном случае, если конфигурация пространства - деформированная окружность, то можно сделать вывод, что в агрегате возникли нештатные ситуации, по виду деформации определяют тип нештатной ситуации, в результате интерпретации цветографической формы оператор (специалист-анализатор) определяет новое правило MI+1 идентификации нештатной ситуации, определяет последовательность рекомендаций по выходу из нештатной ситуации Ind, записывает правило и рекомендации в базу знаний, производя обучение системы, а оси, на которых выявлены аномальные значения параметров в отдельном графическом окне, преобразуют в двухмерный график зависимости физического значения параметра во времени.
Система для осуществления способа содержит устройство ввода данных, мультиплексор, обучаемую нейронную сеть, устройства вывода данных, вход устройства ввода данных является входом системы для входной информации, а выход соединен с первым входом мультиплексора, первый выход которого соединен с входом обучаемой нейронной сети, выход которого соединен к входам устройства вывода данных, отличающаяся тем, что обучаемая нейронная сеть содержит:
- блок визуализации модели изделия, вход которого соединен с входом обучаемой нейронной сети,
- сервер баз знаний, входы которого соединены со вторыми выходами мультиплексора, а выходы - со вторыми входами мультиплексора,
- блок фазификатора, вход которого соединен с выходом блока визуализации модели изделия, а выход - с третьим входом мультиплексора,
- блок дефазификатора, входы которого соединены с третьими выходами мультиплексора, а выход соединен с выходами обучаемой нейронной сети,
- блоки нечеткого логического вывода по числу k контролируемых узлов и агрегатов контролируемого объекта, причем входы блоков нечеткого логического вывода соединены соответственно с четвертыми, пятыми и до 3+k выходами мультиплексора,
- устройство вывода содержит k блоков вывода, выходы которых соединены с вторым входом сервера баз знаний, являющимся обратной связью нейронной сети для ее обучения.
Предложенный способ поясняется чертежами.
Фиг.1 - пример эталона параметра.
Фиг.2 - схема экрана основного окна.
На Фиг.3 представлена интегральная функция отклонения Ф(Ai,n(t)) при штатном функционировании агрегата.
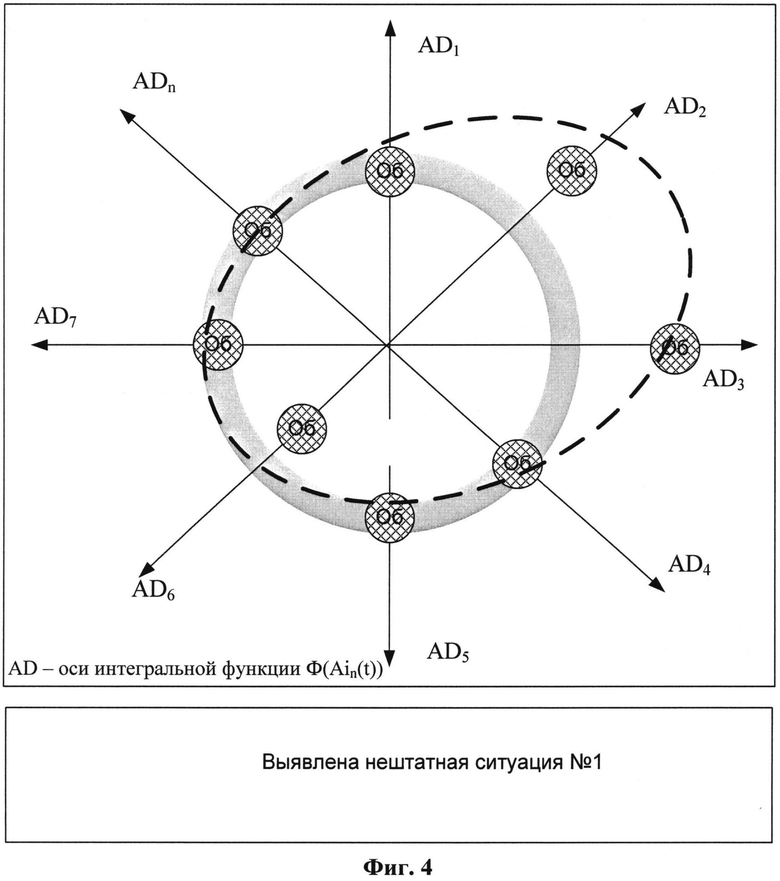
На Фиг.4 представлена интегральная функция отклонения Ф(Ai,n(t)) при возникновении нештатной ситуации агрегата. Пусть в момент времени t1 в агрегате А6 произошла нештатная ситуация №1, в результате чего параметры a2, a3, a6 отклонились от нормального (эталонного). Система вычислит интегральную функцию отклонения Ф(Ai,n(t)), которая в основном окне повлияет на цвет графического образа агрегата А6 и изменит его на близкий к красному. Система автоматически задействует механизм принятия решения с указанием на конкретную нештатную ситуацию. Принятие решения производится с использованием механизмов нечеткого вывода, оперируя нечеткими моделями нештатных ситуаций. В дополнительном окне интегральная функция отклонения Ф(Ai,n(t)) отобразится в графическом виде, показывая оператору цветографическую форму, представляющую собой сформированную в полярной системе координат фигуру, которую интерпретируют как образ состояния объекта контроля в момент возникновения нештатной ситуации.
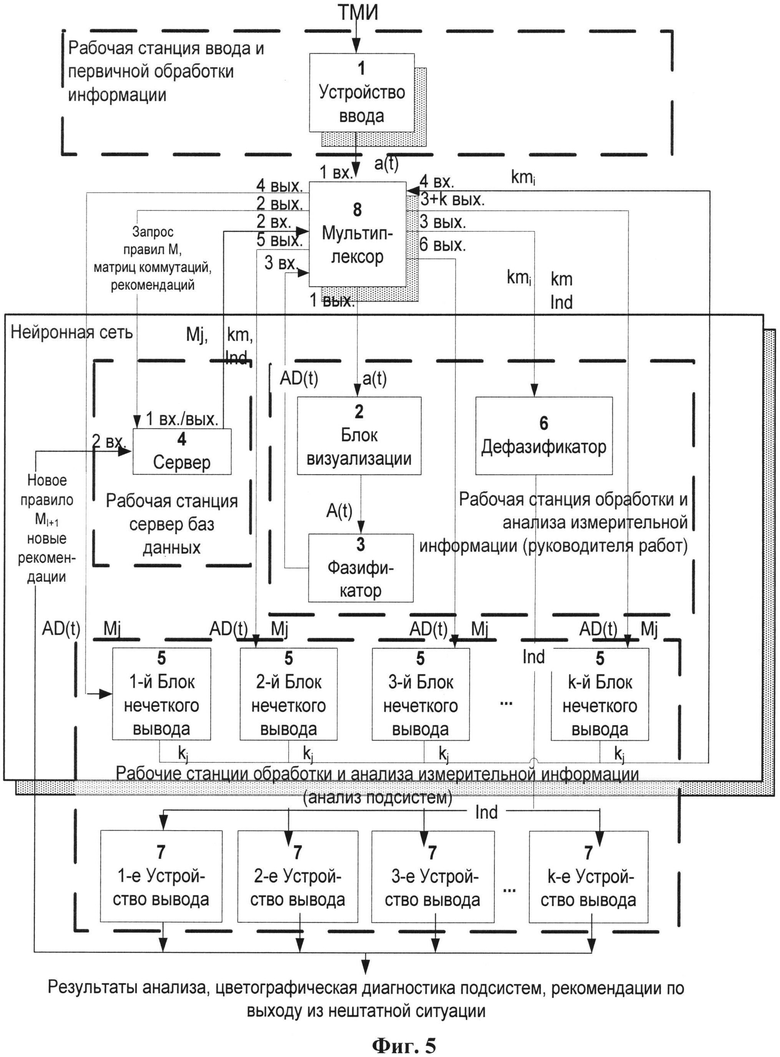
Предложенный способ реализуется системой (устройством), представленной на Фиг.5, состоящей из:
1 - устройства ввода данных;
2 - блока визуализация модели изделия;
3 - фазификатора;
4 - сервера (баз знаний);
5 - блоков нечеткого логического вывода;
6 - дефазификатора;
7 - устройства вывода данных;
8 - мультиплексора.
Устройство ввода данных 1 - блок приема и регистрации измерительной информации, подключенный к входу источника информации (ТМИ), который производит регистрацию, декоммутацию, первичную обработку и получение Ni-мерного четкого (числового) вектора ai(t)=[a(t)i,1, a(t)i,2, ---, a(t)i,N].
Блок визуализации 2 модели изделия с интегрированным отображением состояния каждого агрегата, который преобразует N-мерный четкий (числовой) вектор ai(t)=[a(t)i,1, a(t)i,2, ---, a(t)i,N] в непрерывную (аналоговую) функцию отклонения Ai,n(t) и в вектор отклонения 
Ai,n(t)=2(ami,n(Ti,n(t))-ai,n эт(Tn(t)))/Pi,n эт(Ti,n(t)),
где ai,n эт(Ti,n(t)) - математическое ожидание эталонного значения на интервале Ti,n(t);
Pi,n эт(Ti,n(t)) - амплитуда эталонного значения на интервале Ti,n(t);
i=1…k, k - количество групп параметров агрегатов или узлов объекта;
n=1…Ni, Ni - количество параметров в группе i.
Для каждой группы параметров ai,n(t), относящейся к узлу или агрегату (i=1…k), в каждый момент времени вычисляют вектор отклонения 

На экране основного окна производится визуализация модели изделия с интегрированным отображением состояния каждого агрегата (Фиг.2), при этом изображение агрегата принимает значение «зеленое» (норма), если величина вектора отклонения меньше «1», или принимает значение «красное» (не норма), если величина вектора отклонения больше или равно «1».
В случае обнаружения аномалии задействуется механизм принятия решения.
Этот механизм позволяет по интегрированному отображению достаточно тонко (точно) судить о степени штатного состоянии объекта, а в случае отклонения от штатного с четкой оценкой диагностировать наступление той или иной нештатной ситуации. Кроме того, данный способ позволяет постоянно обучать систему при выявлении новых нештатных ситуаций.
Блок фазификатор 3 преобразует N-мерный четкий (числовой) вектор Ai,n(t)=[Ai,1(t), Ai,2(t), ---, Ai,N(t)] в нечеткое множество дискретных состояний объекта (ADi,n(t)), определяемое функцией принадлежности m(ADi,n(t)) в соответствии с ранее описанным способом. Для чего производятся следующие действия: определяются дискретные состояния объекта (дискретная функция отклонения):
где aq - пороговое значение функции отклонения,
q=1…Q - количество дискретных состояний фазификации.
При необходимости по представленному принципу можно создать любое количество дискретных состояний, в простейшем случае в качестве порогового значения может быть выбран один коэффициент, равный «1», при этом aq+1=∞.
Затем вычисляется интегральная функция отклонения Ф(Ai,n(t)), представляющая собой Ni-мерное пространство (где Ni - количество параметров в группе i, а каждое измерение - дискретная функция отклонения ADi,n(t)), т.е. систему дискретных характеристик контролируемого объекта:

Таким образом, формируют цветографическую матрицу состояний объекта, количество и номера элементов которой соответствуют количеству и номерам контролируемых параметров объекта, при этом элементам матрицы присваивают вычисленные значения дискретной функции отклонения ADi,n(t). Для дальнейших операций вектор ADi,n(t) преобразуют в нечеткий вектор {Adi,n(t), m(Adi,n(t))} в соответствии со значением ADi,n(t) и количеством дискретных состояний фазификации:
Сервер 4 баз знаний, на котором хранятся эталонные (четкие) модели параметров в штатном состоянии и нечеткие модели в виде иерархической каталожной системы на жестком диске (или структурированной СУБД) нештатных состояний изделия. На верхнем уровне в корневом каталоге располагается родительская модель нештатной ситуации, в подкаталогах размещаются дочерние модели, уточняющие конкретную ситуацию, переходы из состояния в состояние. Фактически сервер хранит конфигурацию нейронной сети: описывающую нейрон (решающие правила) и коммутационную матрицу km транспорта между нейронами (с учетом веса дуг сети k). Таким образом, формируется нейронная сеть нештатных ситуаций, в каждом каталоге которой хранятся массивы измерительной информации зарегистрированной на момент возникновения нештатной ситуации, дискретная характеристика контролируемого объекта Mj={Adi,n(t), m(Adi,n(t))}, коммутационная матрица (km) с весовыми коэффициентами, которым соответствует индекс нештатной ситуации (Ind), последовательность инструкций и рекомендаций по выходу из нештатной ситуации соответствующего индекса Ind.
Блоки нечеткого логического вывода 5, которые реализуют систему нечеткого вывода на базе универсальных персональных машин или просто вычислителей (по числу контролируемых подсистем равных k). Эти устройства на основе нечеткого вывода по входному значению, принадлежащему одному нечеткому множеству и являющегося результатом работы фазификатора, определяют выходные значения, принадлежащие другому нечеткому множеству, которые определяют нештатные состояния соответствующих подсистем по исходным данным базы знаний соответствующей родительской модели. Блоки нечеткого вывода производят действия по принятию решения с использованием механизмов нечеткого вывода, оперируя нечеткими моделями нештатных ситуаций Mj={Adi,n(t), m(Adi,n(t))}, при этом Adi,n(t) принимает значения «1», «0», «-1», что соответствует «0» - «норма», «1»=«не норма», «-1»=«не норма». Каждая нечеткая модель хранится в базе знаний в виде иерархической каталожной системы на жестком диске сервера баз знаний. На верхнем уровне в корневом каталоге располагается родительская модель нештатной ситуации, в подкаталогах размещаются дочерние модели, уточняющие конкретную ситуацию. Таким образом, формируется нейронная сеть нештатных ситуаций, в каждом каталоге которой хранятся массивы измерительной информации, зарегистрированной на момент возникновения нештатной ситуации, дискретная характеристика контролируемого объекта Mj={Adi,n(t), m(Adi,n(t))}, последовательность инструкций и рекомендаций по выходу из нештатной ситуации. Вычислители скомпонованы по контролируемым подсистемам и обращаются к своему родительскому каталогу для получения решающих правил, вычислители работают параллельно и дают независимые заключения по каждой из подсистем. Алгоритм работы вычислителя основан на оперативном преобразовании результатов допусковой оценки параметров в соответствующие информационные сигналы в зависимости от результатов допусковой оценки, факта и направления изменения динамического параметра с обобщением по всему множеству параметров на заданном временном интервале и анализа матрицы-диаграммы, являющейся матрицей состояния многопараметрического объекта контроля, количество и номера элементов которой соответствуют количеству и номерам контролируемых параметров объекта, при этом элементам матрицы присваивают вычисленные значения признаков соответствия, после чего формируют цифровую форму-матрицу, представляющую собой сформированную в полярной системе координат фигуру, которую интерпретируют как образ состояния объекта контроля в момент окончания измерений (в момент идентификации нештатной ситуации) в заданном временном интервале. Обученная нейронная сеть является обучаемой искусственной нейронной сетью, причем каждый класс правил нечеткой логики реализуют отдельным фрагментом обучаемой большой искусственной нейронной сети (доменом или поддоменом), где число доменов (поддоменов) соответствует числу классов правил нечеткой логики в иерархии подсистем.
Дефазификатор 6 ставит в соответствие нечеткому входному значению, полученному в результате работы системы нечеткого вывода, некоторое четкое (цифровое) значение выходного параметра, по которому определяют последовательность инструкций и рекомендаций по выходу из нештатной ситуации для каждой из родительской модели. Результатом работы дефазификатора является определение весовых коэффициентов коммутационной матрицы (km). Весовые коэффициенты можно найти известными способами, например, относительно среднего центра по формуле:
где ADcj - центр j-го нечеткого правила;
m(ADcj) - соответствующая функция принадлежности.
По индексу нештатной ситуации (Ind) определяют последовательность инструкций и рекомендаций по выходу из нештатной ситуации.
Устройство вывода данных 7 - цветные видео мониторы и устройства ввода-вывода (принтер, клавиатура и манипулятор типа «мышь»), предназначенные для вывода текущей интегральной функции отклонения в пространстве моделей нештатных ситуаций с отображением диагностического сообщения дефазификатора и возможностью производить обучение системы. На экранах диалоговых окон (цветных видео мониторов), относящихся к соответствующему агрегату, отображается его текущая интегральная функция отклонения в пространстве моделей нештатных ситуаций с отображением диагностического сообщения.
Интегральная функция отклонения i-й группы параметров графически изображается в Ni-мерном пространстве. Для удобства восприятия на экране монитора Ni-мерное пространство изображают в виде Ni-конечной звезды следующим образом: оси Ni-мерного пространства соединяют в точке «минусовой области» с радиальным шагом равным 360/Ni градусов, на осях Ni-мерного пространства фиксируют относительное положение каждого параметра в виде точки на оси, при этом оси калибровочных параметров (каналов) располагают через 180 градусов. Полученную конфигурацию легко оценить по правилу:
- если конфигурация ADi,n(t) пространства - правильная окружность, то агрегат находится в штатном состоянии;
- если конфигурация ADi,n(t) пространства - деформированная окружность, то можно сделать вывод, что в агрегате возникли нештатные ситуации, для чего производится выявление нештатных ситуаций Mj, которые соответствуют нечеткому множеству Mj={Adi,n(t), m(Adi,n(t))}.
При визуальной оценке интегральной функции эксперт может осуществить коррекцию нечеткой модели, тем самым производит обучение системы с указанием иерархии и связи в нечеткой модели.
Мультиплексор 8 - канал передачи данных и коммутационное оборудование, предназначенное для осуществления передачи данных между входами и выходами устройств системы.
В результате применения изобретения, по сравнению с известными способами, достигается первичный эффект, заключающийся в оперативном обнаружении нештатной ситуации и причин ее возникновения, сокращение сроков анализа телеметрируемых объектов за счет отображения на экране многоцветного монитора оценочных образов изделия на основании сравнения с эталонными моделями; визуализации оценки отклонения процессов на объекте с целью выявления схожих признаков нештатных ситуаций.
От использования изобретения следует ожидать и вторичный эффект, заключающийся в создании мощного информационного компонента, позволяющего производить накопление базы данных (знаний) нештатных ситуаций и впоследствии развить систему контроля в систему поддержки принятия решений.
Особенно актуально использование данного изобретения в системах контроля ракетной техники на технических и стартовых комплексах современных и перспективных космодромах.

Изобретение относится к области технической кибернетики, а именно к способам осуществления комплексного контроля состояния многопараметрических объектов по разнородной измерительной информации, и может быть использовано в автоматизированных экспертных системах обработки и анализа телеметрической информации многопараметрического объекта. Технический результат - оперативное обнаружение нештатной ситуации и причин ее возникновения, сокращение сроков анализа телеметрируемых объектов. Способ заключается в оперативном преобразовании результатов допусковой оценки параметров в соответствующие информационные цветовые сигналы видимого спектра в зависимости от результатов допусковой оценки, факта и направления изменения динамического параметра с обобщением по всему множеству параметров на заданном временном интервале и их отображении посредством цветокодовой матрицы-диаграммы, являющейся матрицей состояния многопараметрического объекта контроля. Система для осуществления данного способа содержит устройство ввода данных, мультиплексор, обучаемую нейронную сеть и устройство вывода данных. 2 н.п. ф-лы, 5 ил.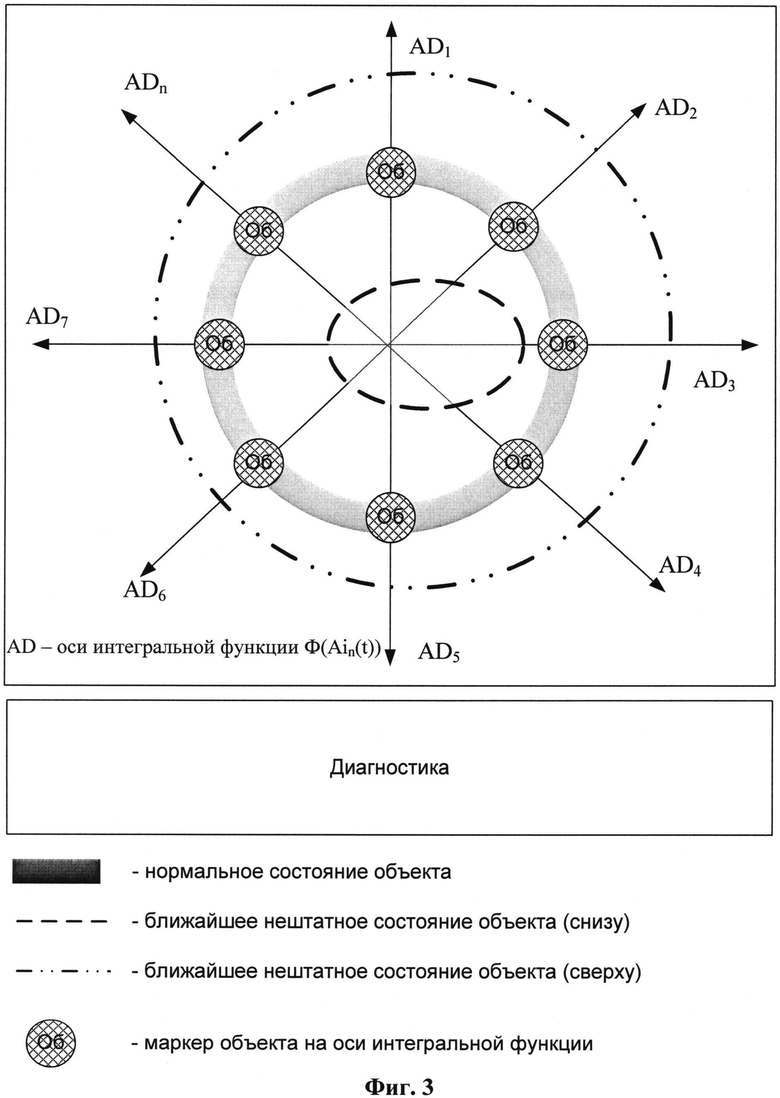
1. Способ автоматизированной обработки и анализа телеметрической информации от многопараметрического объекта, при котором оперативно преобразуют результаты допусковой оценки параметров в соответствующие информационные цветовые сигналы видимого спектра в зависимости от результатов допусковой оценки, факта и направления изменения динамического параметра, обобщают по всему множеству параметров на заданном временном интервале и отображают цветокодовой матрицей-диаграммой, на ее основе формируют матрицу состояний многопараметрического объекта контроля, количество и номера элементов которой соответствуют количеству и номерам контролируемых параметров объекта, причем элементам матрицы присваивают вычисленные значения признаков соответствия, после чего формируют цветографическую форму, которую представляют в полярной системе координат и интерпретируют как образ состояния объекта контроля в момент окончания измерений или в момент идентификации нештатной ситуации в заданном временном интервале, отличающийся тем, что операцией преобразования представляют результаты функционирования группы параметров агрегатов или узлов объекта относительным многомерным параметрическим пространством, в котором нуль на оси измерения устанавливают при нахождении параметра в «норме», отклонение от нормы этой группы представляют длиной вектора группы в параметрическом пространстве и положением параметра относительно эталона на оси измерения в «минусовой», или «нулевой», или «плюсовой» областях, вектор определяют функцией отклонения Ai,n(t), при которой каждый параметр ai,n(t) в каждый момент времени статистически анализируют, для чего задают интервал Ti,n(t), вычисляют математическое ожидание ami,n(t), сравнивают с эталоном, который определяют кортежем [математическое ожидание эталонного значения на интервале Ti,n(t), амплитуда эталонного значения на интервале Ti,n(t), Ti,n(t)], сохраняют кортеж в базе знаний, вычисляют непрерывную аналоговую функцию отклонения Ai,n(t) по формуле, равной отношению разности математического ожидания текущего значения параметра и эталонного значения на интервале Ti,n(t) к половине амплитуды эталонного значения на этом интервале измерения, после определения вектора формируют двухуровневую локализацию неисправности, при которой на первом уровне визуализации формируют графический образ изделия по группам, объединяют параметры в i=1…k групп по агрегатам и узлам с числом параметров n=1…Ni, анализируют длину векторов групп, выделяют группы с векторами длиной больше единицы первым цветом видимого света - «не норма», с иной длиной вектора - вторым цветом видимого спектра, для групп «не норма» запускают второй уровень локализации, для которого используют элементы теории нечеткой логики, для чего проводят фазификацию путем вычисления матрицы состояний многопараметрического объекта контроля, являющейся матрицей-системой дискретных характеристик ADi,n(t) контролируемого объекта, ячейке которой присваивают значение ноль, если функция отклонения Ai,n(t) больше отрицательного, но меньше положительного значения первого коэффициента порогового отклонения функции отклонения, присваивают значение q, если функция отклонения Ai,n(t) больше или равна положительному значению текущего коэффициента порогового отклонения функции отклонения, но меньше положительного значения последующего коэффициента порогового отклонения функции отклонения, присваивают значение -q, если функция отклонения Ai,n(t) меньше или равна отрицательному значению текущего коэффициента порогового отклонения функции отклонения, но больше отрицательного значения последующего коэффициента порогового отклонения функции отклонения, при этом q - номер коэффициента порогового отклонения, а количество коэффициентов равно количеству дискретных состояний фазификации Q, по длине вектора группы и положению на дискретной оси системы дискретных характеристик контролируемого объекта определяют, насколько существенна аномалия, приводит ли она к нештатной ситуации и какой конкретно по анализу принадлежности нечеткому множеству нештатных ситуаций Mj={Adi,n(t), m(Adi,n(t))}, где j=1…I - количество нештатных ситуаций, определенных индексами Ind, для чего вектор ADi,n(t) преобразуют в нечеткий вектор {Adi,n(t), m(Adi,n(t))} в соответствии со значением ADi;n(t) и количеством дискретных состояний фазификации Q, при этом значению Adi,n(t) присваивают одно из трех состояний или «нуль», если ADi,n(t) равно нулю или «минус единица», если ADi,n(t) больше нуля или «плюс единица», если ADi,n(t) меньше нуля, значению m(Adi,n(t)) присваивают единицу, если ADi,n(t) равно нулю и q*1/Q в остальных случаях, оценку производят нечетким выводом по накопленной информации из сервера базы знаний нештатных ситуаций известными методами с использованием аппарата теории нечетких множеств, проводят дефазификацию, для чего находят весовые коэффициенты kj матрицы коммутации kmi каждой группы параметров, элементам матрицы коммутации присваивают весовые коэффициенты kj по первому измерению и индекс Ind нештатной ситуации по второму, находят наибольший коэффициент в каждой матрице коммутаций kmi, из второго измерения матриц коммутаций выбирают индекс нештатной ситуации нештатной ситуации Ind и формируют последовательность рекомендаций по выходу из нештатной ситуации, кроме того, эксперт имеет возможность оценить идентифицированную нештатную ситуацию графически, для чего систему дискретных характеристик контролируемого объекта характеризуют положением группы параметров в Ni-мерном пространстве в радиальной системе координат, которое графически изображают в виде звезды осей Ni-мерного пространства, которые соединяют в точке «минусовой области» с радиальным шагом, равным 360/Ni градусов, на осях Ni-мерного пространства, фиксируют относительное положение каждого параметра в виде точки на оси, полученную конфигурацию оценивают визуально, если конфигурация этого пространства - правильная окружность, то агрегат находится в штатном состоянии, в противном случае, если конфигурация пространства - деформированная окружность, то можно сделать вывод, что в агрегате возникли нештатные ситуации, по виду деформации определяют тип нештатной ситуации, в результате интерпретации цветографической формы оператор определяет новое правило MI+1 идентификации нештатной ситуации, определяет последовательность рекомендаций по выходу из нештатной ситуации Ind, записывает правило и рекомендации в базу знаний, производя обучение системы, а оси, на которых выявлены аномальные значения параметров в отдельном графическом окне, преобразуют в двухмерный график зависимости физического значения параметра во времени.
2. Система для осуществления способа, которая содержит устройство ввода данных, вход которого является входом системы для входной информации, а выход соединен с первым входом мультиплексора, первый выход которого присоединен с входом обучаемой нейронной сети, выход которого соединен к входам устройства вывода данных, отличающаяся тем, что обучаемая нейронная сеть содержит блок визуализации модели изделия, вход которого соединен с входом обучаемой нейронной сети, сервер баз знаний, входы которого соединены со вторыми выходами мультиплексора, а выходы - со вторыми входами мультиплексора, блок фазификатора, вход которого соединен с выходом блока визуализации модели изделия, а выход - с третьим входом мультиплексора, блок дефазификатора, входы которого соединены с третьими выходами мультиплексора, а выход соединен с выходами обучаемой нейронной сети, блоки нечеткого логического вывода по числу k контролируемых узлов и агрегатов контролируемого объекта, причем входы блоков нечеткого логического вывода соединены соответственно с четвертыми, пятыми и до 3+k выходами мультиплексора, кроме того, устройство вывода содержит k блоков вывода, выходы которых соединены со вторым входом сервера баз знаний, одновременно являющимся входом обучаемой нейронной сети.
| СПОСОБ ВИЗУАЛЬНОГО ОТОБРАЖЕНИЯ И АНАЛИЗА АНОМАЛИЙ МНОГОМЕРНОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2000 |
|
RU2200345C2 |
| СПОСОБ ВИЗУАЛЬНОГО ПРЕДСТАВЛЕНИЯ И АНАЛИЗА АНОМАЛЬНЫХ ЗНАЧЕНИЙ ИЗМЕРИТЕЛЬНЫХ ПАРАМЕТРОВ МНОГОМЕРНОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2001 |
|
RU2237273C2 |
| СПОСОБ ПОСТРОЕНИЯ СИСТЕМ НЕЧЕТКОЙ ЛОГИКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2417442C2 |
| СПОСОБ КОМПЛЕКСНОГО КОНТРОЛЯ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО РАЗНОРОДНОЙ ИНФОРМАЦИИ | 2011 |
|
RU2459245C1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

