Изобретение относится к системам мониторинга в режиме реального времени состояния подвижных и стационарных объектов, расположенных на глобальных территориях поверхности Земли и в околоземном пространстве.
В условиях увеличивающегося количества природных и техногенных катастроф, с одной стороны, и существенной зависимости объективности информации о состоянии потенциально опасных объектов от человеческого фактора и корпоративных интересов, с другой стороны, постоянно возрастает актуальность создания систем оперативного мониторинга (контроля) состояния подвижных и стационарных многопараметрических объектов и формирования на основе результатов мониторинга своевременных и эффективных управляющих решений по корректировке условий и режимов функционирования данных объектов. Под мониторингом здесь и далее будем понимать комплексную систему наблюдения за параметрами состояния многопараметрических объектов, оценки и прогноза их изменений под воздействием техногенных, природных и террористических угроз. Под многопараметрическим объектом (далее по тексту - МПО) здесь и далее будем понимать объекты, на которых размещены различные комплекты измерительной аппаратуры, в состав которых могут входить датчики для измерения температуры, влажности, давления, линейных нагрузок, распределенных нагрузок, уровня радиации, состава газов, концентрации растворов, датчики наличия контакта, а также другие датчики по требованию потребителей.
К настоящему времени предложен ряд технических решений, обеспечивающих возможность решения задачи контроля состояния объекта, его элементов и окружающей среды в режиме реального времени.
Известна система глобального автоматического контроля транспортных средств при нормальных и экстремальных условиях [Патент на изобретение, Россия, №2158003, МПК G01S 7/00, Н04В 7/185, 2000 г.]. Система обеспечивает режим «Мониторинг» в нормальных и режим «Авария» в экстремальных условиях эксплуатации. Оба режима реализуются единым аппаратным комплексом, включающим размещение на каждом транспортном средстве (ТС) постоянно включенного в процессе эксплуатации радиомаяка (РМ) совмещенного типа мгновенного действия, пакеты сигналов которого синхронно ретранслируются через геостационарные ИСЗ на сопряженные с ними наземные пункты приема информации (ПНИ). Основное отличие режима «Авария» от режима «Мониторинг» заключается в оперативном (0,5 с) переходе РМ на специально выделенную для передачи через ИСЗ аварийных сигналов полосу частот в диапазоне 400 МГц с одновременным уменьшением (с 10 с до 1 с) периода повторения пакета сигналов. Особенностью и отличительным признаком данного технического решения является необходимость обеспечения непрерывной передачи больших потоков пакетов сигналов с последующей их обработкой и анализом по методикам, вследствие чего требуются значительные временные и материальные затраты для получения достоверных результатов о штатном или нештатном функционировании объекта. Вместе с тем, данная система не обеспечивает прогнозирование изменения аномальных значений параметров состояния проконтролированных объектов во времени, формирование на основе результатов прогноза рекомендаций на изменение аномальных параметров состояния проконтролированных объектов, что в свою очередь может приводить к увеличению количества нештатных и аварийных ситуаций на объектах контроля.
Известна система контроля за перемещением и состоянием подвижных объектов [Патент на изобретение, Россия, №2305327, МПК G08G 1/123, 2005 г.]. Данная система контроля содержит накопители информации, установленные на контролируемых подвижных объектах и снабженных внутренними таймерами, радиочастотные идентификаторы, установленные в соответствующих местах траектории движения, блок сбора информации, установленный в конечной точке траектории движения, центр обработки информации. При этом блок сбора информации соединен одним или более каналами связи со стационарно расположенным центром обработки информации, обеспечивающим привязку реального времени к факту регистрации каждого идентификационного сигнала, соответствующего местоположению данного радиочастотного идентификатора.
Данная система позволяет осуществлять автоматизированный сбор информации, накопленной непосредственно на подвижном объекте, о прохождении им заданных точек траектории следования с привязкой к реальному времени, без перегрузки каналов обмена между отдельными компонентами системы, за счет первичной логической обработки информации непосредственно в накопителе информации.
Особенностью и отличительным признаком аналога является использование ограниченного перечня характеристик состояния объектов, что приводит к недостаточной полноте (достоверности) оценки параметров состояния проконтролированных объектов в целом, и, в конечном счете, к увеличению количества нештатных и аварийных ситуаций на вышеупомянутых объектах. Кроме того, данная система не обеспечивает прогнозирование изменения аномальных значений параметров состояния проконтролированных объектов во времени, выработку на основе результатов прогноза команд (рекомендаций) на изменение (устранение и(или) изменение) аномальных параметров состояния проконтролированных объектов, что также может приводить к увеличению количества нештатных и аварийных ситуаций на объектах контроля.
Наиболее близким аналогом к предлагаемой системе является система глобального автоматического контроля в режиме реального времени параметров состояния объектов» [Патент на изобретение, Россия, №2340004, G08B 25/14, 2007 г.], которая и выбрана в качестве прототипа.
При этом термин «глобальность» в названии прототипа подразумевает как количество контролируемых объектов, так и размер обслуживаемых территорий, удовлетворяющих ожидаемым потребностям Российской Федерации. Прототип содержит в своем составе орбитальную группировку геостационарных ИСЗ - ретрансляторов информации, комплекс наземных, сопряженных с ретрансляторами, пунктов приема и обработки информации, комплекс наземных абонентских терминалов, комплекс территориальных радиостанций приема информации от наземных пунктов приема и обработки информации.
Особенностями прототипа является реализация в системе «сортировки» информации на «пакеты» по признаку территориальной принадлежности и передача кодированных «пакетов» по космическим радиолиниям связи на соответствующие территориальные станции приема информации.
Однако указанные особенности не обеспечивают оперативное реагирование на аномальные изменения значений параметров состояния контролируемых объектов.
Техническим результатом настоящего изобретения является сокращение времени реагирования на аномальные изменения параметров состояния контролируемых многопараметрических объектов.
Технический результат достигается за счет того, что в систему глобального автоматического контроля в режиме реального времени параметров состояния объектов, содержащую орбитальную группировку геостационарных спутников Земли - ретрансляторов информации, комплекс наземных, сопряженных с ретрансляторами пунктов приема и обработки информации (ППОИ) в составе последовательно соединенных приемной антенны, приемника целевой информации, блока формирования «пакетов» информации, передатчика «пакетов» информации и передающей антенны, комплекс территориальных радиостанций приема информации от ППОИ, комплекс наземных абонентских терминалов (AT) в составе последовательно соединенных приемной антенны и приемника сигналов КНС ГЛОНАСС/GPS, последовательно соединенных комплекта датчиков, передатчика целевой информации и передающей антенны, отличающаяся тем, что в каждый ППОИ дополнительно введен блок прогнозирования и реагирования на изменения аномальных значений параметров состояния МПО, выход которого соединен со входом блока формирования «пакетов» информации, а вход - с выходом приемника целевой информации, в состав каждого AT дополнительно введен блок оценки соответствия фактических значений параметров состояния контролируемых МПО допустимым, выход которого соединен со входом передатчика целевой информации, а i-й вход, где i=1…I, где I - количество датчиков, соединен с выходом соответствующего датчика.
На фиг. 1 представлена система глобального мониторинга в режиме реального времени параметров состояния многопараметрических объектов (МПО);
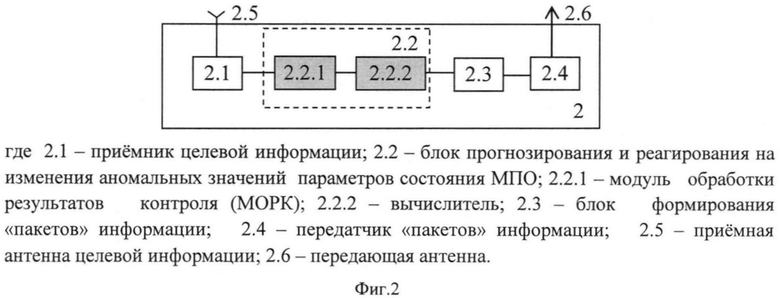
на фиг. 2 представлен вариант реализации наземного пункта приема и обработки информации;
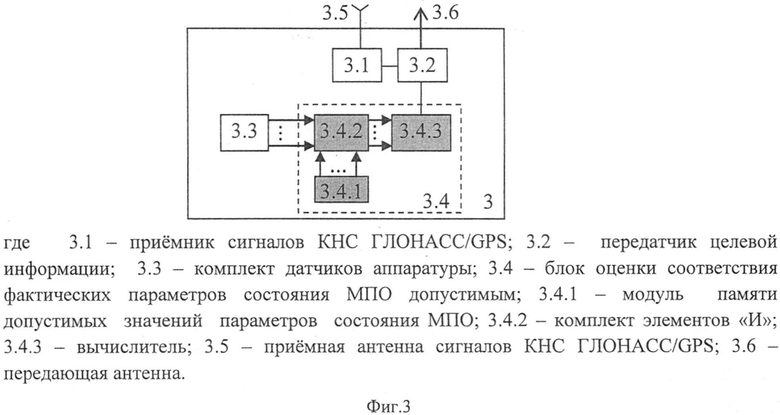
на фиг. 3 представлен вариант реализации абонентского терминала.
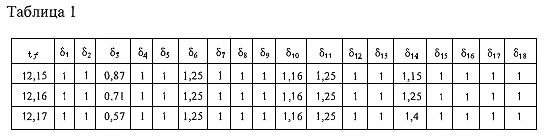
В таблице 1 представлена форма матрицы состояния МПО.
Система глобального мониторинга в режиме реального времени параметров состояния многопараметрических объектов (МПО) (фиг. 1…3) (далее по тексту - система) содержит орбитальную группировку геостационарных искусственных спутников Земли - ретрансляторов информации 1; комплекс наземных сопряженных с ретрансляторами пунктов приема и обработки информации (ППОИ) 2, каждый из которых включает в себя приемник целевой информации 2.1, блок прогнозирования и реагирования на изменения аномальных параметров состояния МПО 2.2, блок формирования «пакетов» информации 2.3, передатчик «пакетов» информации 2.4, приемную антенну 2.5, передающую антенну 2.6, информационную шину 2.7; комплекс абонентских терминалов (AT) 3, каждый из которых включает в себя приемник сигналов космических навигационных систем 3.1, передатчик целевой информации 3.2, комплект датчиков для измерения фактических значений параметров состояния контролируемых МПО 3.3, блок оценки соответствия фактических значений параметров состояния проконтролированных МПО допустимым 3.4, приемную антенну 3.5, передающую антенну 3.6 и информационную шину 3.7; комплекс территориальных радиостанций приема информации 4.
Одним из отличительных признаков предлагаемой системы является ввод в состав каждого ППОИ 2 (см. фиг 2) блока прогнозирования и реагирования на изменения аномальных параметров состояния МПО 2.2, предназначенного для оперативного прогноза моментов времени возникновения на МПО критических (чрезвычайных) ситуаций с учетом предварительно полученных точечных и интервальных оценок аномальных значений параметров состояния МПО, а также своевременного формирования рекомендаций по изменению аномальных значений параметров состояния МПО.
Данный блок может быть выполнен (см. фиг. 2) в виде последовательно соединенных модуля обработки результатов контроля (МОРК) 2.2.1 и вычислителя 2.2.2, при этом выход приемника целевой информации 2.1 соединен с входом МОРК 2.2.1, а выход вычислителя 2.2.2 соединен с входом блока формирования «пакетов» информации 2.3.
В каждом МОРК 2.2.1 ППОИ 2 до начала применения системы формируют базу данных, содержащую:
идентификаторы ID={IS, IO, IY}, где IS={ISη} - идентификаторы AT 3, IO={IOi}, i=1, …, I - идентификаторы МПО и IY={γij} - идентификаторы контролируемых параметров состояния МПО;
последовательность моментов времени {tn}, n=1, …, Nη передачи результатов оценки значений параметров состояния МПО от AT 3 в ППОИ 2, при этом tn=t0+nΔη, где t0 - время начала мониторинга, Δη - заданный для η-го AT интервал времени передачи матриц состояния МПО (форма матрицы приведена в табл. 1), значение которого может уменьшаться в зависимости от динамики изменения состояния параметров объектов контроля;
совокупность правил, обеспечивающих:
выделение из принятых от приемника целевой информации 2.1 матриц значений признаков несоответствия 
формирование временных рядов 
В каждом вычислителе 2.2.2 ППОИ 2 до начала применения системы формируют базу данных, содержащую:
словарь терминов, которые используются для формирования текстовой части Ŧ={Ŧ1, Ŧ2} рекомендаций по изменению аномальных параметров состояния МПО. При этом Ŧ1 - текстовая часть единой для МПО формы, которая предназначена для отображения возможного интервала времени на изменение аномальных параметров состояния МПО, идентификаторов МПО и их координат; Ŧ2 - текстовая часть рекомендаций, содержание которой формируется в зависимости от результатов прогнозирования изменения аномальных значений параметров состояния конкретного МПО во времени;
совокупность правил, обеспечивающих:
получение известными методом, описанным, например, в [4. Дж. Бендат, А. Пирсол. Прикладной анализ случайных данных. Москва, Мир, 1989, с. 106-117], точечных 


определение длительностей интервалов 
поочередный, начиная с ΔTij=min, выбор 


формирование совокупности возможных действий {dq}, в которую включаются организационно-технические мероприятия, обеспечивающие увеличение (если 

определение значений времени реализации 
формирование совокупности рациональных действий {dq рац}, время реализации которых удовлетворяет условию 
вывод из словаря терминов, соответствующих вошедшим в {dq рац} действиям;
формирование путем объединения терминов текста Ŧij рекомендаций по изменению аномальных значений параметров состояния МПО и их передача в блок формирования «пакетов» информации.
Принцип работы введенного в систему блока прогнозирования и реагирования на аномальные изменения параметров состояния МПО 2.2 заключается в следующем. Входными сигналами для данного блока являются поступающие из приемника целевой информации 2.1 «посылки» информации, содержащие матрицы, элементами которых являются признаки соответствия 







Затем на основе результатов прогнозирования изменения аномальных значений параметров состояния МПО во времени формируют рекомендации по изменению этих значений. Для этого в вычислителе 2.2.2 производится:
поочередный, начиная с ΔTij=min, выбор 


формирование совокупности возможных действий {dq}, в которую включаются организационно-технические мероприятия, обеспечивающие увеличение (если 

определение значений времени реализации 
формирование совокупности рациональных действий {dq рац}, время реализации которых удовлетворяет условию 
вывод из словаря терминов, соответствующих вошедшим в {dq рац} действиям;
формирование путем объединения терминов текста Ŧij рекомендаций по изменению аномальных значений параметров состояния МПО и их передача в блок формирования «пакетов» информации.
Другим отличительным признаком предлагаемой системы является ввод в состав каждого из AT (см. фиг 3) блока оценки соответствия фактических значений параметров состояния МПО допустимым 3.4, предназначенного для оперативного (в масштабе времени, близком к реальному) и независимого от количества контролируемых параметров, их физической сущности и единиц измерения получения, объединения и компактного представления результатов оценки параметров состояния МПО.
Данный блок может быть выполнен (см. фиг. 3) в виде последовательно соединенных модуля памяти допустимых значений параметров состояния контролируемых объектов 3.4.1, четных входов комплекта элементов «И» 3.4.2 и вычислителя 3.4.3, при этом выходы датчиков 3.3 подключены к нечетным входам комплекта элементов «И» 3.4.2, а выход вычислителя 3.4.3 подсоединен к входу передатчика целевой информации 3.2.
До начала применения системы в каждый модуль 3.4.1 вводят матрицу  нижних и верхних границ интервалов допустимых значений для каждого из контролируемых системой параметров
нижних и верхних границ интервалов допустимых значений для каждого из контролируемых системой параметров 
До начала применения системы в каждом вычислителе 3.4.3 формируют базу данных, содержащую:
идентификаторы ID={IS, IO, IY}, где IS={ISη} - идентификаторы AT 3, IO={IOi}, i=1, …, I - идентификаторы МПО и IY={γij} - идентификаторы контролируемых параметров состояния МПО;
последовательность моментов времени {tn}, n=1, …, Nη передачи результатов оценки значений параметров состояния МПО от AT 3 в ППОИ 2, при этом tn=t0+nΔη, где t0 - время начала мониторинга, Δη - заданный для n-го AT интервал времени передачи матриц (форма матрицы приведена в табл. 1), значение которого может изменяться в зависимости от динамики изменения состояния параметров объектов контроля;
совокупность правил, обеспечивающих:
оценку признаков соответствия 

 ,
,  ,
,
где 
формирование матриц состояния МПО, первые элементы всех строк которых соответствуют временным меткам, а количество и номера остальных элементов которых - количеству и номерам контролируемых параметров объекта, при этом в первые элементы всех строк заносят значения t={tf} времени окончания измерений параметров состояния МПО датчиками 3.1, а остальным элементам матриц присваивают вычисленные в соответствии с вышеприведенными соотношениями значения признаков соответствия 

Принцип работы введенного в систему блока 3.4 заключается в следующем. При появлении на одном или нескольких нечетных входах комплекта элементов «И» 3.4.2 выходных сигналов от соответствующих датчиков 3.3 происходит срабатывание соответствующих элементов с последующей оценкой в вычислителе 3.4.3 по правилам (1) признаков соответствия

В целом работа предлагаемой системы (фиг. 1) характеризуется следующим. Постоянно находящиеся в активном режиме абонентские терминалы 3, представленные на фиг. 1, с заданной периодичностью {tn}, n=1, …, Nη передают «посылки» целевой информации по направлению 3-1. «Посылка» информации наряду с идентификационным кодом потребителя и содержанием сигнала КНС будет содержать только одну из строк вышеупомянутой матрицы (см. табл. 1), а не весь массив измеряемых параметров состояния контролируемого объекта (это позволит сократить объем «посылки» не менее чем на 40%, а именно, с 1500 бит (у прототипа) до 850-900 бит в предлагаемой системе). Эта информация через геостационарный ИСЗ-ретранслятор 1 по направлению 1-2 поступает на ППОИ 2. ППОИ 2 формирует «пакеты» информации, содержащие идентификаторы МПО {IOi}, длительности интервалов 
Сформированные пакеты информации с ППОИ по направлению 2-1 передаются на геостационарный ИСЗ-ретранслятор 1 (или ИСЗ-ретранслятор другой космической системы связи) и далее по направлению 1-4 на региональные станции приема информации 4, которые связаны с потребителями информации. «Пакеты» информации с ППОИ также могут быть переданы потребителям через соответствующие аппаратно-программные комплексы, обеспечивающие выход в сеть Интернет и на наземные линии связи.
Таким образом, дополнительный ввод в состав каждого пункта приема и обработки информации блока прогнозирования и реагирования на изменения аномальных значений параметров состояния МПО и дополнительный ввод в состав каждого абонентского терминала блока оценки соответствия фактических значений параметров состояния контролируемых многопараметрических объектов допустимым обеспечивает сокращение времени реагирования на аномальные изменения параметров состояния контролируемых многопараметрических объектов, а также существенно (не менее чем на 40% по сравнению с прототипом) снижает уровень загрузки используемых в системе геостационарных ИСЗ-ретрансляторов информации.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, идентичных всем признакам заявляемого технического решения, отсутствуют, что указывает на соответствие заявляемого изобретения критерию охраноспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными признаками заявляемого комплекса, показали, что в общедоступных источниках информации не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками.
Из уровня техники также не подтверждена известность влияния отличительных признаков заявляемого изобретения на указанный заявителем технический результат, следовательно, заявляемое изобретение соответствует условию «изобретательский уровень».
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартные комплектующие и языки программирования общего пользования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДСИСТЕМА УПРАВЛЕНИЯ ДЕЯТЕЛЬНОСТЬЮ ОРГАНИЗАЦИОННО-ТЕХНИЧЕСКОЙ СИСТЕМЫ | 2020 |
|
RU2748458C1 |
| Способ комплексного мониторинга и управления состоянием многопараметрических объектов | 2016 |
|
RU2627242C1 |
| СПОСОБ КОМПЛЕКСНОГО КОНТРОЛЯ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО РАЗНОРОДНОЙ ИНФОРМАЦИИ | 2011 |
|
RU2459245C1 |
| СИСТЕМА ГЛОБАЛЬНОГО АВТОМАТИЧЕСКОГО КОНТРОЛЯ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ПАРАМЕТРОВ СОСТОЯНИЯ ОБЪЕКТОВ | 2007 |
|
RU2340004C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2007 |
|
RU2373650C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2007 |
|
RU2364926C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ МНОГОПАРАМЕТРИЧЕСКИХ ОБЪЕКТОВ | 2008 |
|
RU2395817C1 |
| СПОСОБ ЗАЩИТЫ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СЕТИ ОТ ВТОРЖЕНИЙ | 2019 |
|
RU2705773C1 |
| Способ прогнозирования кризисных ситуаций при контроле многопараметрических процессов | 2016 |
|
RU2653286C2 |
| СПОСОБ МОНИТОРИНГА БЕЗОПАСНОСТИ АВТОМАТИЗИРОВАННЫХ СИСТЕМ | 2017 |
|
RU2646388C1 |

Изобретение относится к системам мониторинга в режиме реального времени состояния объектов различных типов и степени подвижности. Техническим результатом изобретения является сокращение времени реагирования на аномальные изменения параметров состояния контролируемых многопараметрических объектов (МПО). Указанный технический результат достигается тем, что в известную систему глобального автоматического контроля в режиме реального времени параметров состояния объектов в каждый ее пункт приема и обработки информации дополнительно введен блок прогнозирования и реагирования на изменения аномальных значений параметров состояния МПО, выход которого соединен со входом блока формирования «пакетов» информации, а вход - с выходом приемника целевой информации, в состав каждого абонентского терминала дополнительно введен блок оценки соответствия фактических значений параметров состояния контролируемых МПО допустимым, выход которого соединен со входом передатчика целевой информации, а i-й вход, где i=1…I, где I - количество датчиков, соединен с выходом соответствующего датчика. 1 табл., 3 ил.
Система глобального мониторинга в режиме реального времени параметров состояния многопараметрических объектов (МПО), содержащая орбитальную группировку геостационарных спутников Земли - ретрансляторов информации, комплекс наземных, сопряженных с ретрансляторами пунктов приема и обработки информации (ППОИ) в составе последовательно соединенных приемной антенны, приемника целевой информации, блока формирования «пакетов» информации, передатчика «пакетов» информации и передающей антенны, комплекс территориальных радиостанций приема информации от ППОИ, комплекс наземных абонентских терминалов (AT) в составе последовательно соединенных приемной антенны и приемника сигналов КНС ГЛОНАСС/GPS, последовательно соединенных комплекта датчиков, передатчика целевой информации и передающей антенны, отличающаяся тем, что в каждый ППОИ дополнительно введен блок прогнозирования и реагирования на изменения аномальных значений параметров состояния МПО, выход которого соединен со входом блока формирования «пакетов» информации, а вход - с выходом приемника целевой информации, в состав каждого AT дополнительно введен блок оценки соответствия фактических значений параметров состояния контролируемых МПО допустимым, выход которого соединен со входом передатчика целевой информации, а i-й вход, где i=1…I, где I - количество датчиков, соединен с выходом соответствующего датчика.
| СИСТЕМА ГЛОБАЛЬНОГО АВТОМАТИЧЕСКОГО КОНТРОЛЯ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ПАРАМЕТРОВ СОСТОЯНИЯ ОБЪЕКТОВ | 2007 |
|
RU2340004C1 |
| СИСТЕМА ГЛОБАЛЬНОГО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ НОРМАЛЬНЫХ И ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ | 2000 |
|
RU2158003C1 |
| СИСТЕМА КОНТРОЛЯ ЗА ПЕРЕМЕЩЕНИЕМ И СОСТОЯНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2305327C2 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| RU 98123169 A, 10.10.2000 | |||
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| US 5414432 A1, 09.05.1995 | |||
| US 5931889 A1, 03.08.1999 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| US 6674368 B2, 06.01.2004. | |||

