Настоящее изобретение относится к области сборки самолета. В частности, настоящее изобретение имеет отношение к системе позиционирования для установки крыла летательного аппарата на фюзеляж летательного аппарата, к способу установки крыла, к читаемому компьютером носителю, к процессору данных и элементу программы.
Для того, чтобы собрать самолет, крылья самолета должны быть установлены на фюзеляж. Поэтому крылья размещаются на устройстве позиционирования, которое выполнено с возможностью перемещения крыла на фюзеляж. Затем отверстия позиционирования в фюзеляже и в крыле подгоняются таким образом, что крыло оптимально выравнивалось относительно фюзеляжа. После подгонки отверстий позиционирования можно просверлить окончательные расточенные отверстия. После этого устройство позиционирования вместе с крылом снимаются с фюзеляжа так, чтобы можно было очистить расточенные отверстия и снять заусенцы. Кроме того, выполняется герметизация герметизирующим компаундом, и могут быть предварительно просверлены и подогнаны кронштейны. Такие кронштейны применяются как элементы внутреннего соединения между крылом и фюзеляжем.
Однако после очистки крыла и снятия в просверленных отверстиях заусенцев устройство позиционирования необходимо переместить назад, и крыло должно быть подогнано относительно фюзеляжа для окончательной установки.
Задачей настоящего изобретения является обеспечение возможности улучшенной установки крыла на фюзеляже летательного аппарата.
Согласно примеру осуществления настоящего изобретения предусматривается система позиционирования для установки крыла летательного аппарата на фюзеляж летательного аппарата, содержащая установочное устройство и расчетное устройство, при этом установочное устройство выполнено с возможностью перемещения крыла относительно фюзеляжа из первого положения во второго положения, при этом в первом положении крыло и фюзеляж отделены друг от друга, так чтобы крыло можно было очистить и снять заусенцы в просверленных отверстиях, при этом во втором положении крыло и фюзеляж находятся в установочном положении, так чтобы крыло можно было установить на фюзеляж и при этом перемещение из первого положения во второе положение направляется расчетным устройством.
Поэтому, согласно данному примеру осуществления настоящего изобретения, перемещение из положения очистки назад в положение установки (после того, как были сняты заусенцы в просверленных отверстиях и крыло было очищено) выполняется в автоматическом или полуавтоматическом режиме. Таким образом, трудоемкая, трудная подгонка и повторное выравнивание крыла относительно фюзеляжа не должны выполняться пользователем, а выполняются с помощью направления компьютером.
Согласно другому примеру осуществления настоящего изобретения установочное устройство дополнительно выполнено с возможностью выравнивания крыла относительно фюзеляжа, определяя, таким образом, положение установки и перемещая крыло из положения установки во второе положения так, чтобы крыло можно было очистить и снять заусенцы в просверленных отверстиях.
Например, начальное выравнивание крыла может быть выполнено пользователем. После этого крыло снимается с фюзеляжа и чистится. Второе и окончательное выравнивание крыла затем выполняется в автоматическом режиме с направлением компьютером.
Согласно другому примеру осуществления настоящего изобретения расчетное устройство выполнено с возможностью хранения данных позиционирования, соответствующих положению установки после выравнивания крыла, при этом направление перемещения из первого положения во второе положение выполняется на основе данных положения.
Таким образом, выполнив начальное выравнивание, соответствующие данные положения сохраняются в компьютерной системе. Эти данные положения затем используются для дальнейших процессов выравнивания.
Согласно другому примеру осуществления настоящего изобретения направление перемещения из первого положения во второе положение выполняется автоматически без взаимодействия с пользователем.
Это может обеспечить быстрое и полностью автоматизированное окончательное позиционирование крыла.
Согласно другому примеру осуществления настоящего изобретения направление перемещения из первого положения во второе положения выполняется полуавтоматически во взаимодействии с пользователем.
Например, это может предусматривать взаимодействие с пользователем, которое позволяет определить скорость окончательной процедуры выравнивания. Например, в аварийном случае, пользователь может снизить скорость выравнивания или даже остановить процесс позиционирования.
Согласно другому примеру осуществления настоящего изобретения система позиционирования дополнительно содержит центральное расчетное устройство, выполненное с возможностью передачи управляющих сигналов к расчетному устройству и для получения сигналов положения от расчетного устройства.
Таким образом, процедура позиционирования может отслеживаться и управляться внешним центральным расчетным устройством. Такое центральное расчетное устройство может быть выполнено с возможностью слежения и направления нескольких индивидуальных подвижных установочных устройств и может контролироваться пользователем.
Согласно другому примеру осуществления настоящего изобретения система позиционирования дополнительно содержит блок управления, связанный с центральным расчетным устройством и выполненный с возможностью приема ввода пользователя.
Согласно данному примеру осуществления настоящего изобретения ввод пользователя может быть напрямую осуществлен в блок управления, который может затем передавать полученные пользовательские входные сигналы на центральное расчетное устройство, которое, в свою очередь, может передавать соответствующие управляющие сигналы на (подвижное) расчетное устройство установочного устройства. Это может обеспечивать пользовательское слежение или пользовательское управление.
Согласно другому примеру осуществления настоящего изобретения предусматривается способ установки крыла летательного аппарата на фюзеляж летательного аппарата, содержащий этапы, на которых перемещают крыло относительно фюзеляжа из первого положения во второе положение, при этом в первом положении крыло и фюзеляж отделены друг от друга, так что крыло можно очистить и можно снять заусенцы в просверленных отверстиях, при этом во втором положении, крыло и фюзеляж находятся в положении установки, так что крыло может быть установлено на фюзеляж и при этом перемещение из первого положения во второе положение направляют расчетным устройством.
Это может обеспечить быстрый и эффективный способ окончательного выравнивание крыла.
Кроме того, согласно другому примеру осуществления настоящего изобретения способ дополнительно содержит этапы, на которых выравнивают крыло относительно фюзеляжа, определяя, таким образом, положение установки и перемещают крыло из положения установки во второе положение, в котором крыло можно очистить и снять заусенцы в просверленных отверстиях.
Кроме того, согласно другому примеру осуществления настоящего изобретения может быть предусмотрен читаемый компьютером носитель, в котором храниться компьютерная программа для установки крыла летательного аппарата на фюзеляж летательного аппарата, которая, будучи выполняемой расчетным устройством, заставляет расчетное устройство выполнять вышеупомянутые этапы способа.
Кроме того, согласно другому примеру осуществления настоящего изобретения предусматривается элемент программы для установки крыла летательного аппарата на фюзеляж летательного аппарата, который будучи выполняемым расчетным устройством, заставляет расчетное устройство выполнять вышеупомянутые этапы способа.
Кроме того, согласно другому примеру осуществления настоящего изобретения предусматривается устройство обработки данных для установки крыла летательного аппарата на фюзеляж летательного аппарата, при этом устройство обработки данных содержит память для хранения положения установки крыла и расчетное устройство, выполненное с возможностью осуществления вышеупомянутых этапов способа.
Те, кто имеет опыт в данной области техники, по достоинству оценят то, что способ установки крыла может быть воплощен как компьютерная программа, то есть через программное обеспечение, или может быть воплощен, используя одну или более специальных электронных цепей оптимизации, то есть в аппаратных средствах, или способ может быть воплощен в гибридной форме, то есть посредством компонентов программного обеспечения и компонентов аппаратных средств.
Элемент программы, согласно примеру осуществления настоящего изобретения, предпочтительно может загружаться в рабочую память процессора данных. Процессор данных может, таким образом, быть оборудован для выполнения примеров осуществления способов настоящего изобретения. Компьютерная программа может быть написана на соответствующем языке программирования, таком как, например, C++ и может быть сохранена на читаемом компьютером носителе, таком как CD-ROM.
К тому же, компьютерная программа может быть доступна из компьютерной сети, такой как Всемирная Паутина, из которой ее можно скачать в устройства обработки изображений или процессоры, или любые подходящие компьютеры.
Эти и другие аспекты настоящего изобретения станут очевидными и понятными ссылаясь на осуществления, описанные в дальнейшем.
Данное изобретение будет теперь описано, только в качестве примера, со ссылками на сопровождающие чертежи, на которых:
Фиг.1 показывает упрощенное схематическое представление системы позиционирования, расположенное в первом положении согласно примеру осуществления настоящего изобретения.
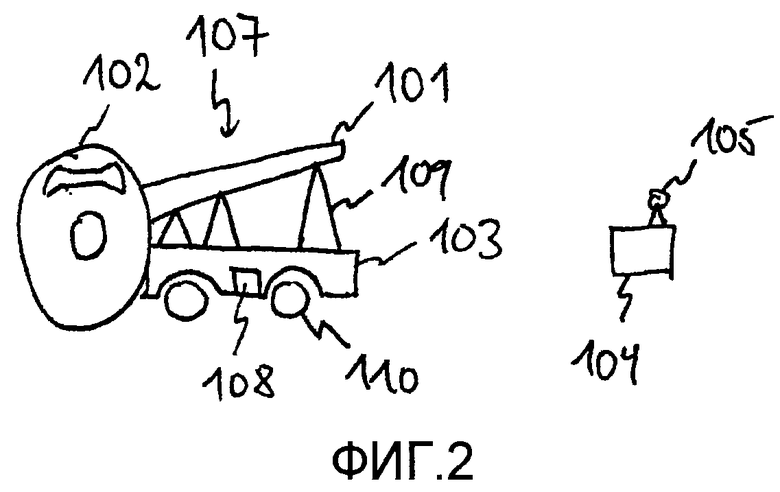
Фиг.2 показывает схематическое представление системы позиционирования, расположенное во втором положении согласно примеру осуществления настоящего изобретения.
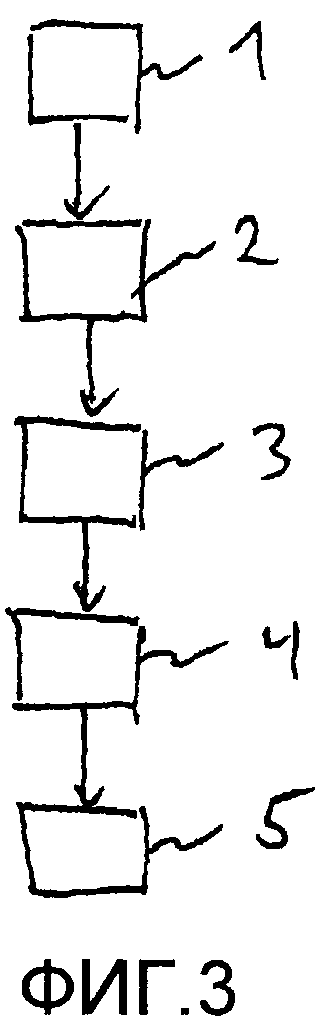
Фиг.3 показывает блок-схему способа согласно примеру осуществления настоящего изобретения.
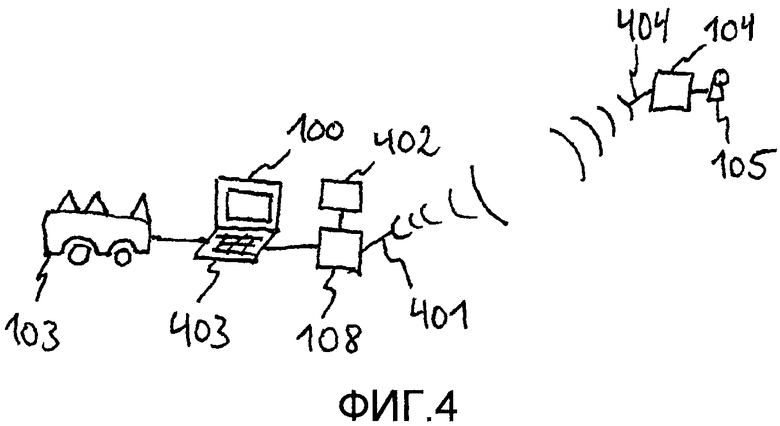
Фиг.4 показывает пример осуществления настоящего изобретения, включающий устройство обработки данных согласно настоящему изобретению для выполнения примера осуществления способа в соответствии с настоящим изобретением.
Иллюстрация в чертежах является схематической. В различных чертежах подобные или идентичные элементы снабжаются одними теми же цифрами ссылки.
Фиг.1 показывает схематическое представление системы позиционирования, расположенное в первом положении 106 согласно примеру осуществления настоящего изобретения. Система позиционирования, изображенная на фиг.1, содержит установочное устройство 103, выполненное с возможностью установки крыла 101.
Установочное устройство 103 содержит расчетное устройство 108 выполненное с возможностью направления перемещения установочного устройства 103. Кроме того, установочное устройство 103 выполнено с возможностью выравнивания крыла 101. Такое выравнивание может быть выполнено посредством устройств 109 выравнивания вместе с устройствами 110 перемещения. Устройства 109 выравнивания выполнены с возможностью перемещения крыла 101 вертикально и, если потребуется, горизонтально. При использовании, например, трех устройств 109 выравнивания, расставленных в виде треугольника, крыло 101 может быть перемещено и наклонено в любом нужном направлении.
В положении, изображенном на фиг.1 (то есть первом положении), крыло 101 и фюзеляж 102 отделены друг от друга. Поэтому в предварительно просверленных отверстиях могут быть сняты заусенцы и крыло может быть очищено перед выполнением окончательного выравнивания и установки крыла на фюзеляже.
Кроме того, предусматривается центральное расчетное устройство 104, которое выполнено с возможностью связи с подвижным расчетным устройством 108, например, через беспроводную линию связи или другие средства связи, такие как стандартная проводная линия связи. Центральное расчетное устройство 104 связывается с блоком 105 управления, который выполнен с возможностью приема ввода пользователя. Например, пользователь может определять скорость выравнивания или скорость перемещения установочного устройства 103, или пользователь может вмешаться в процедуру позиционирования, например, в случае аварии.
Фиг.2 показывает схематическое представление системы позиционирования во втором положении 107 согласно примеру осуществления настоящего изобретения. Во втором положении 107 устройство 103 позиционирования было перемещено к фюзеляжу 102, таким образом обеспечивая выравнивание крыла 101 относительно фюзеляжа 102. Во втором положении 107 может быть выполнена окончательная установка крыла 101 на фюзеляж 102. Перемещение из первого положения 106 во второе положение 107 направляется расчетным устройством 108 с или без взаимодействия из центрального расчетного устройства 104 (и/или пользователем).
Ручное выравнивание не требуется, так как перемещение установочного устройства 103 направляется расчетным устройством 108.
Фиг.3 показывает блок-схему способа согласно примеру осуществления настоящего изобретения. Способ начинается с Этапа 1, в котором крыло выравнивают относительно фюзеляжа. Теперь, при выполнении Этапа 2, могут быть просверлены предварительные отверстия и данные позиционирования, соответствующие этому выровненному положению, сохраняют в памяти устройства обработки данных. Затем, при выполнении Этапа 3, установочное устройство перемещают от фюзеляжа, так что теперь крыло и фюзеляж отделены друг от друга. При выполнении Этапа 4 крыло очищается и снимаются заусенцы в предварительно просверленных отверстиях. Затем, при выполнении Этапа 5, установочное устройство вместе с крылом возвращается назад в положение установки. Это обратное перемещение выполняется с направлением компьютером на основе сохраненных данных положения.
Затем может быть выполнена окончательная установка крыла.
Процедура выравнивания, согласно изобретению, очень точна. Точность процедуры может составлять до 1/10 от приемлемого допуска.
Фиг.4 показывает пример осуществления системы позиционирования согласно настоящему изобретению. Система позиционирования включает установочное устройство 103, устройство ввода 403, устройство вывода 100, расчетное устройство 108, читаемый компьютером носитель 402 и линию 401 связи.
Устройство 403 ввода может быть выполнено с возможностью прямого пользовательского ввода в расчетное устройство 108. Устройство 100 вывода выполнено с возможностью обеспечения вывода информации, соответствующей данным позиционирования, скорости позиционирования и другим параметрам, которые могут быть интересны.
Кроме того, центральное расчетное устройство 104 предоставлено вместе с блоком управления 105. По линии 404 связи обеспечивается связь между центральным расчетным устройством 104 и подвижным расчетным устройством 108. Согласно аспекту настоящего изобретения автоматическое или полуавтоматическое позиционирование крыла может управляться посредством подвижного устройства 403 ввода и посредством стационарного центрального устройства 105 ввода.
Необходимо отметить, что термин "содержащий" не исключает другие элементы или этапы, а единственное число не исключает множественного числа. Кроме того, элементы, описанные в связи с различными осуществлениями, могут быть объединены.
Необходимо также отметить, что знаки ссылок в формуле изобретения не должны быть истолкованы как ограничение объема формулы изобретения.
Заявленная группа изобретений относится к области самолетостроения, в частности системе позиционирования для установки крыла (101) летательного аппарата на его фюзеляж (102). Система содержит программируемое установочное устройство (103) и расчетное устройство (108). Установочное устройство (103) выполнено с возможностью выравнивания крыла (101) относительно фюзеляжа (102) и определения положения установки и перемещения крыла из положения установки в первое положение, в котором крыло может быть очищено и сняты заусенцы с просверленных отверстий, а также перемещения крыла относительно фюзеляжа из первого положения (106) во второе положение (107). Перемещение из первого положения во второе положение направляется расчетным устройством (108). Группа изобретений содержит также способ установки крыла, использующий читаемый компьютером носитель, и устройство обработки данных, содержащее память для хранения данных, используемых в способе. Обеспечивается быстрота установки крыла на фюзеляж. 4 н. и 10 з.п. ф-лы, 4 ил.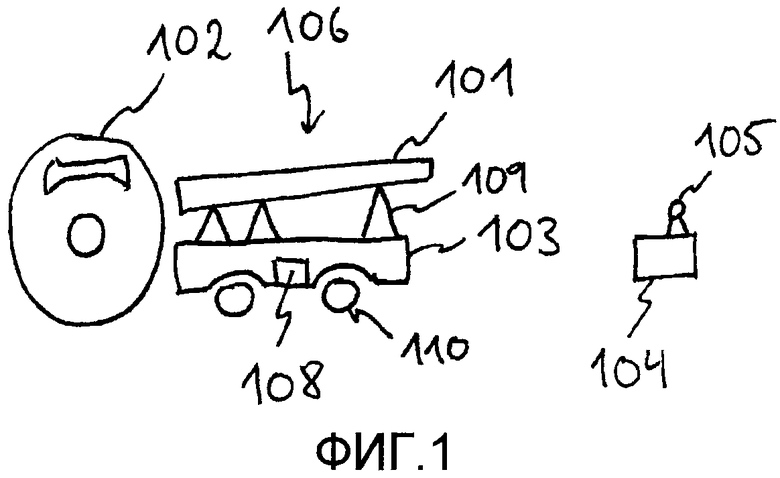
1. Система позиционирования для установки крыла (101) летательного аппарата на фюзеляж (102) летательного аппарата, система позиционирования, содержащая установочное устройство (103) и расчетное устройство (108), при этом установочное устройство (103) выполнено с возможностью выравнивания крыла (101) относительно фюзеляжа (102), таким образом, определяя положение установки, перемещения крыла из положения установки в первое положение и перемещения крыла относительно фюзеляжа из первого положения (106) во второе положение (107), при этом в первом положении, крыло и фюзеляж отделены друг от друга так, что крыло может быть очищено и сняты заусенцы с просверленных отверстий, при этом во втором положении крыло и фюзеляж находятся в положении установки так, что крыло может быть установлено на фюзеляж, при этом направление перемещения из первого положения во второе положение выполняется расчетным устройством (108).
2. Система позиционирования по п.1, в которой расчетное устройство (108) выполнено с возможностью хранения данных положения соответствующих положению установки после выравнивания крыла и при этом направление перемещения из первого положения во второе положение выполняется на основе данных положения.
3. Система позиционирования по п.1, в которой направление перемещения из первого положения во второе положение выполняется автоматически без взаимодействия с пользователем.
4. Система позиционирования по п.1, в которой направление перемещения из первого положения во второе положение выполняется полуавтоматически во взаимодействии с пользователем.
5. Система позиционирования по п.1, которая дополнительно содержит центральное расчетное устройство (104), выполненное с возможностью передачи управляющих сигналов на расчетное устройство (108) и приема сигналов положения от расчетного устройства (108).
6. Система позиционирования по п.1, которая дополнительно содержит блок (105) управления, связанный с центральным расчетным устройством (104) и выполненный с возможностью приема ввода пользователя.
7. Система позиционирования по п.1, в которой направление перемещения из первого положения во второе положение выполняется автоматически без взаимодействия с пользователем или полуавтоматически во взаимодействии с пользователем.
8. Система позиционирования по п.2, которая дополнительно содержит центральное расчетное устройство (104), выполненное с возможностью передачи управляющих сигналов на расчетное устройство (108) и приема сигналов положения от расчетного устройства (108); и/или
блок (105) управления, связанный с центральным расчетным устройством (104) и выполненный с возможностью приема ввода пользователя.
9. Система позиционирования по п.7, которая дополнительно содержит центральное расчетное устройство (104), выполненное с возможностью передачи управляющих сигналов на расчетное устройство (108) и приема сигналов положения от расчетного устройства (108) и/или блок (105) управления, связанный с центральным расчетным устройством (104) и выполненный с возможностью приема ввода пользователя.
10. Система позиционирования по п.1, которая дополнительно содержит центральное расчетное устройство (104), выполненное с возможностью передачи управляющих сигналов на расчетное устройство (108) и приема сигналов положения от расчетного устройства (108) и/или блок (105) управления, связанный с центральным расчетным устройством (104) и выполненный с возможностью приема ввода пользователя.
11. Система позиционирования по п.10, в которой направление перемещения из первого положения во второе положение выполняется автоматически без взаимодействия с пользователем или полуавтоматически во взаимодействии с пользователем.
12. Способ установки крыла (101) летательного аппарата на фюзеляж (102) летательного аппарата, содержащий этапы, на которых выравнивают крыло (101) относительно фюзеляжа (102), перемещают крыло из выровненного положения в первое положение и перемещают крыло относительно фюзеляжа из первого положения (106) во второе положение (107), при этом выровненное положение определяет положение установки, а в первом положении крыло и фюзеляж отделены друг от друга так, что крыло можно очистить и снять заусенцы из просверленных отверстий, при этом во втором положении крыло и фюзеляж находятся в положении установки так, что крыло может быть установлено на фюзеляж, и при этом перемещение из первого положения во второе положение направляют расчетным устройством (108).
13. Читаемый компьютером носитель (402), в котором хранится компьютерная программа для установки крыла (101) летательного аппарата на фюзеляж (102) летательного аппарата, которая, будучи выполняемой расчетным устройством (108), заставляет расчетное устройство выполнять этапы способа по п.12.
14. Устройство для обработки данных для установки крыла (101) летательного аппарата на фюзеляж (102) летательного аппарата, устройство обработки данных, содержащее память для хранения положения, в котором крыло выравнивается на фюзеляже, причем упомянутое положение представляет положение установки крыла, и расчетное устройство (108), выполняющее направление перемещения крыла относительно фюзеляжа из первого положения во второе положение, при этом в первом положении крыло и фюзеляж отделены друг от друга так, что крыло можно очистить и снять заусенцы из просверленных отверстий и во втором положении крыло и фюзеляж находятся в положении установки, так что крыло может быть установлено на фюзеляж.
| Устройство для питания токовых цепей односистемных устройств релейной защиты | 1981 |
|
SU957335A1 |
| Способ имитации пульсового потока в крупных артериальных сосудах | 2023 |
|
RU2821778C1 |
| JP 2006051557 A, 23.02.2006 | |||
| US 6230382 B1, 15.05.2001. | |||

