Изобретение относится к области сборки летательных аппаратов. Более конкретно изобретение относится к способу монтажа крыла на фюзеляже летательного аппарата, к монтажной системе, к машиночитаемому носителю, к программному элементу и к процессору.
Когда в процессе сборки летательного аппарата на его фюзеляж необходимо устанавливать крыло, требуется точное выдерживание угла атаки и угла стреловидности крыла. Поэтому крыло устанавливается на подвижной позиционирующей установке, которая предназначена для перемещения крыла к фюзеляжу и для регулировки (корректировки) положения крыла относительно фюзеляжа. Однако такая регулировка представляет собой достаточно сложный процесс и занимает много времени.
Целью изобретения является улучшение процесса регулировки положения крыла.
В соответствии с одним из вариантов осуществления настоящего изобретения предлагается способ монтажа крыла на фюзеляже летательного аппарата, включающий измерение первого расхождения между первой действительной координатой z первой опорной точки крыла и первой требуемой координатой z первой опорной точки, причем измерение первого расхождения выполняют с использованием первого измерительного устройства, прикрепленного к фюзеляжу, и первого позиционирующего устройства, прикрепленного к крылу.
Поэтому в соответствии с этим вариантом осуществления изобретения путем простого прикрепления измерительного устройства к фюзеляжу и позиционирующего устройства к крылу, в процессе монтажа крыла может быть определено отклонение крыла от требуемого положения. В результате может быть обеспечена быстрая и эффективная регулировка положения крыла.
В соответствии с другим вариантом осуществления настоящего изобретения способ включает дополнительно определение второго расхождения между второй действительной координатой z второй опорной точки крыла и второй требуемой координатой z второй опорной точки, причем определение второго расхождения выполняется с использованием второго измерительного устройства, прикрепленного к фюзеляжу, и второго позиционирующего устройства, прикрепленного к крылу.
В соответствии с этим вариантом выполняется второе измерение отклонения крыла от требуемого положения, например, в другом месте зоны контакта крыла и фюзеляжа. Таким образом, может быть обеспечена регулировка положения крыла в двух измерениях.
В соответствии с другим вариантом осуществления настоящего изобретения способ включает дополнительно регулировку положения крыла относительно фюзеляжа в соответствии с первым расхождением и/или вторым расхождением.
Например, в соответствии с этим вариантом после определения двух расхождений может быть выполнена корректировка положения крыла, в результате чего эти расхождения уменьшаются или сводятся к минимуму.
В соответствии с другим вариантом осуществления настоящего изобретения способ включает дополнительно: прикрепление первого измерительного устройства к фюзеляжу; установку первого позиционирующего устройства в определенном положении относительно первого измерительного устройства; перевод отверстия, расположенного в первой опорной точке, на первое позиционирующее устройство, в результате чего в первом позиционирующем устройстве выполняется отверстие; и прикрепление первого позиционирующего устройства к крылу, так что положение отверстия будет соответствовать положению опорной точки крыла.
Таким образом, например, точное положение первой опорной точки относительно измерительного устройства может быть переведено на позиционирующее устройство, прикрепленное к крылу. Поэтому после перемещения крыла к фюзеляжу можно определить, находятся ли измерительное и позиционирующее устройства в заданном положении относительно друг друга или нет. Если они не находятся в заданном положении относительно друг друга, то определяется соответствующее расхождение, на основе которого может быть выполнена дополнительная корректировка.
В соответствии с другим вариантом осуществления настоящего изобретения установку первого позиционирующего устройства в заданном положении относительно первого измерительного устройства выполняют с помощью проставки.
Например, проставка может быть фиксатором, выполненным, например, из алюминия, титана или другого металла или соединения металлов, или из любого другого материала, такого как синтетический материал. Однако проставка может иметь и любую другую форму.
В соответствии с другим вариантом осуществления настоящего изобретения способ включает дополнительно регулировку положения крыла в зависимости от точности положения самой верхней точки крыла.
Учет положения самой верхней точки крыла обеспечивает корректировку положения крыла по оси y (см. фигуру 1).
В соответствии с другим вариантом осуществления настоящего изобретения способ включает дополнительно корректировку положения крыла на основе определения контакта между лонжероном и крылом.
В этом случае может обеспечиваться точная регулировка положения крыла по оси x (см. фигуру 1).
В соответствии с другим вариантом осуществления настоящего изобретения определение первого расхождения выполняется с помощью электронного вычислительного устройства.
Второе расхождение может быть определено с помощью того же или другого электронного вычислительного устройства. В результате может быть обеспечено быстрое и эффективное определение расхождений.
В соответствии с другим аспектом осуществления настоящего изобретения предлагается монтажная система для монтажа крыла на фюзеляже летательного аппарата, содержащая блок определения первого расхождения между первой действительной координатой z первой опорной точки крыла и первой требуемой координатой z первой опорной точки, причем определение первого расхождения выполняют с использованием первого измерительного устройства, прикрепленного к фюзеляжу, и первого позиционирующего устройства, прикрепленного к крылу.
В соответствии с другим аспектом осуществления настоящего изобретения предлагается машиночитаемый носитель, на котором записана компьютерная программа монтажа крыла на фюзеляже летательного аппарата, которая при ее выполнении процессором обеспечивает осуществление им вышеуказанных стадий способа.
В соответствии с другим аспектом осуществления настоящего изобретения предлагается программный элемент для обеспечения монтажа крыла на фюзеляже летательного аппарата, который при его выполнении процессором обеспечивает осуществление им вышеуказанных стадий способа.
В соответствии с другим аспектом осуществления настоящего изобретения предлагается процессор для монтажа крыла на фюзеляже летательного аппарата, который обеспечивает осуществление вышеуказанных стадий способа.
Процесс монтажа и регулировки положения крыла может быть обеспечен с использованием компьютерной программы (программного обеспечения) или одной или нескольких электронных специализированных схем (аппаратных средств) оптимизации процесса или же с использованием гибридных решений, то есть сочетания программных и аппаратных компонентов.
Программный элемент в соответствии с одним из вариантов осуществления изобретения предпочтительно загружается в ОЗУ процессора данных. Такой процессор данных может обеспечивать выполнение различных вариантов предлагаемого в настоящем изобретении способа. Компьютерная программа может быть написана на любом языке программирования, таком как, например, C++, и может храниться на машиночитаемом носителе, таком как CD-ROM. Кроме того, компьютерная программа может быть доступна в сети, такой как "Всемирная паутина", откуда она может быть скачана в процессоры или другие подходящие компьютеры.
Эти и другие особенности настоящего изобретения станут более ясными из нижеприведенного описания вариантов его осуществления.
Изобретение описывается ниже на конкретном примере со ссылками на прилагаемые чертежи, на которых показано:
фигура 1 - схематический вид части фюзеляжа летательного аппарата, на которой устанавливается крыло;
фигура 2 - схематический вид монтажной секции в соответствии с одним из вариантов осуществления настоящего изобретения;
фигура 3 - схематический вид монтажной секции после перевода отверстий на позиционирующие устройства;
фигура 4 - схематический вид крыла, к которому прикреплены позиционирующие устройства;
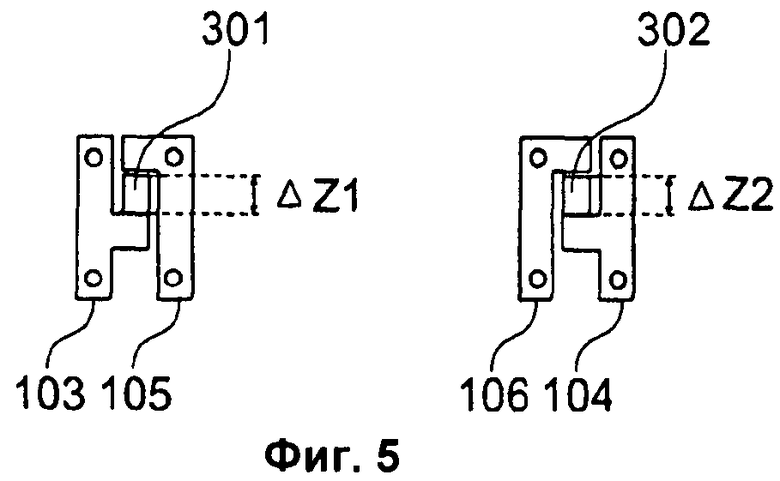
фигура 5 - схематический вид позиционирующих устройств, установленных в определенном положении относительно монтажных устройств с помощью дистанцирующих устройств (проставок), в соответствии с одним из вариантов осуществления настоящего изобретения;
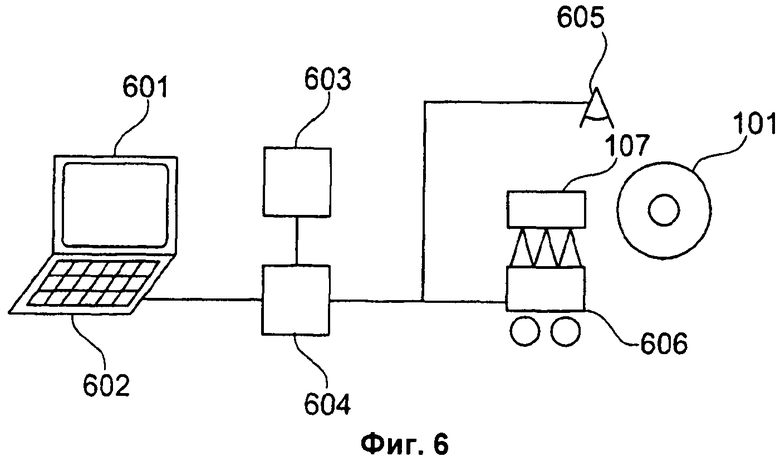
фигура 6 - схематический вид монтажной системы, осуществляющей предложенный способ, в соответствии с одним из вариантов осуществления настоящего изобретения;
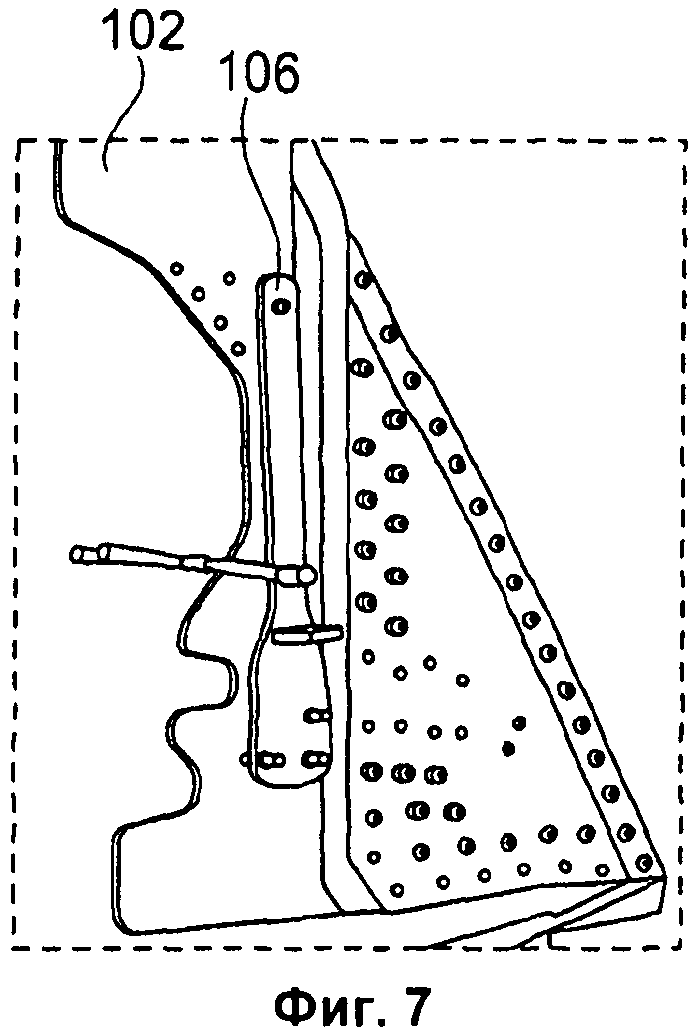
фигура 7 - схематический вид монтажной секции фигуры 1 в первом положении сборки в соответствии с одним из вариантов осуществления настоящего изобретения;
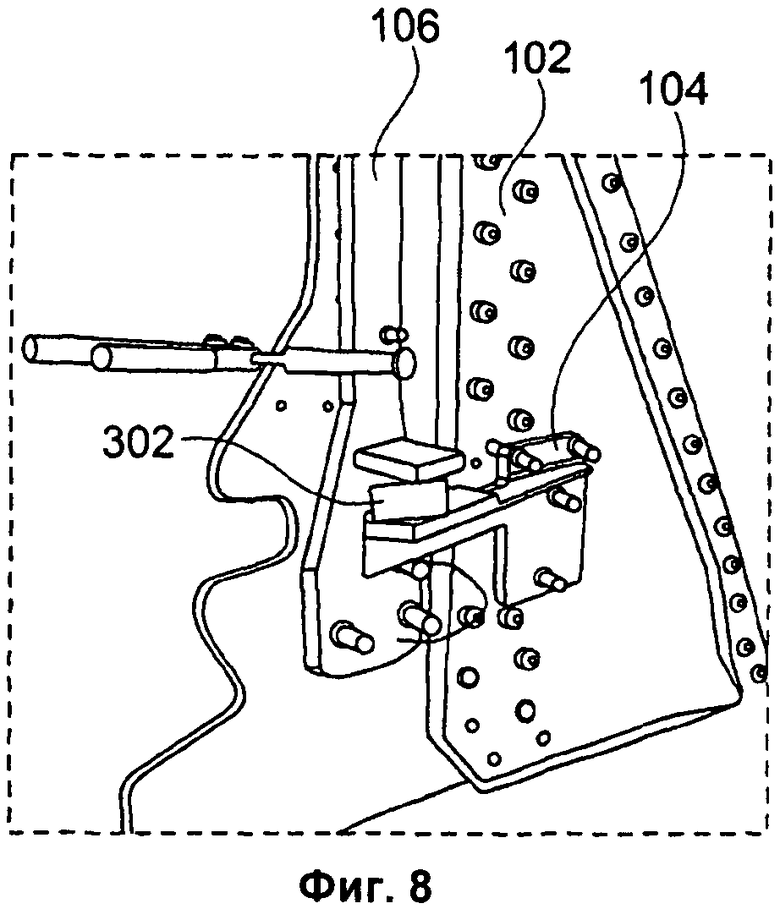
фигура 8 - схематический вид монтажной секции фигуры 1 во втором положении сборки в соответствии с одним из вариантов осуществления настоящего изобретения;
фигура 9 - схематический вид монтажной секции фигуры 1 в третьем положении сборки в соответствии с одним из вариантов осуществления настоящего изобретения;
фигура 10 - схематический вид крыла фигуры 4 в четвертом положении сборки в соответствии с одним из вариантов осуществления настоящего изобретения;
фигура 11 - схематический вид монтажной части фигуры 1 и крыла фигуры 4 в пятом положении сборки в соответствии с одним из вариантов осуществления настоящего изобретения;
Чертежи имеют схематичный характер. Одинаковые или тождественные элементы обозначаются на различных чертежах одними и теми же ссылочными номерами.
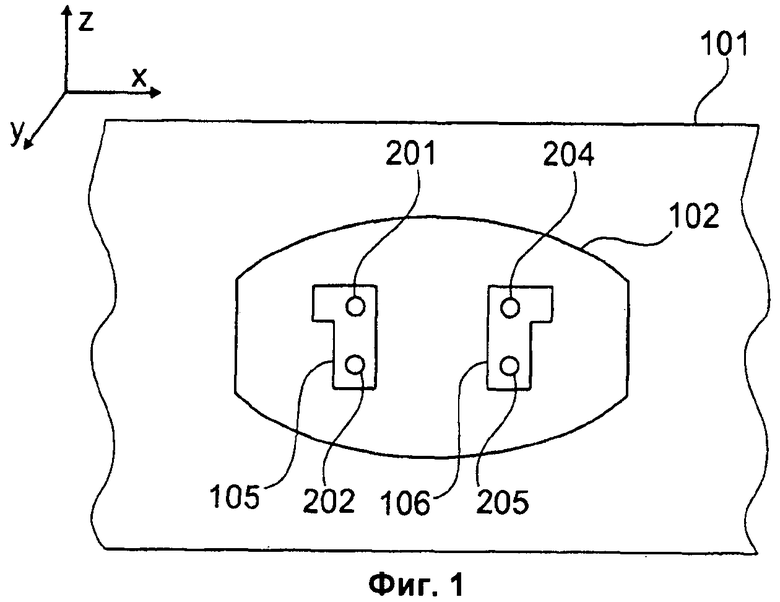
На фигуре 1 представлен схематический вид фюзеляжа 101 летательного аппарата с монтажной секцией 102, на которой может быть установлено крыло. Монтажная секция 102 содержит установочные отверстия 201, 202, 204, 205. Установочные отверстия 201, 202, 204, 205 предназначены для позиционирования крыла относительно фюзеляжа 101.
Монтажная секция 102 может содержать дополнительно передний и задний лонжероны (на фигуре 1 не показаны). Крыло, которое должно быть установлено на монтажной секции 102, может содержать соответствующий передний лонжерон и соответствующий задний лонжерон.
Передний и задний лонжероны содержат по два сквозных отверстия 201, 202 и 204, 205, соответственно. К монтажной секции 102 могут быть прикреплены (и установлены в определенном положении относительно четырех сквозных отверстий) первое 105 и второе 106 позиционирующее устройства.
Система координат вверху слева на фигуре 1 определяет направления осей x, y и z.
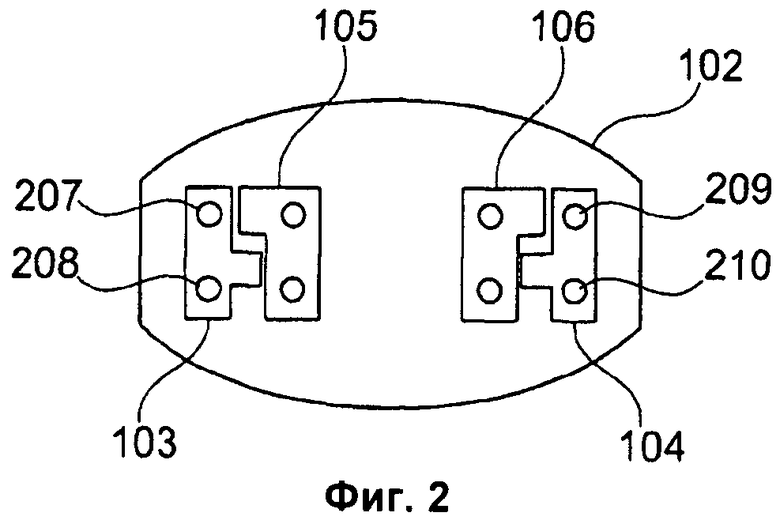
На фигуре 2 показана схематически монтажная секция 102 после установки монтажных устройств 103, 104 и позиционирующих устройств 105, 106.
На первой стадии первое измерительное устройство 103 прикрепляют к фюзеляжу или к монтажной секции 102, например, с помощью крепежных устройств 207, 208. Кроме того, на другой стороне монтажной секции 102 к монтажной секции 102 с помощью крепежных устройств 209, 210 прикрепляется измерительное устройство 104.
Затем на второй стадии в определенном положении относительно первого измерительного устройства 103 устанавливается первое позиционирующее устройство 105. Это может быть выполнено с помощью проставки 301, как показано на фигуре 5. Далее, в определенном положении относительно второго измерительного устройства 104 устанавливается второе позиционирующее устройство 106.
После этого позиционирующие отверстия 201, 202 переносятся в первое позиционирующее устройство 105, в результате чего в нем выполняется отверстие. Далее, отверстия 204, 205 переносятся во второе позиционирующее устройство 106.
Затем на следующей стадии первое и второе позиционирующие устройства 105, 106 прикрепляют к крылу.
После этого крыло перемещают в направлении к фюзеляжу и определяют расхождения между фактическими координатами z первой 211 и второй 213 опорных точек крыла 107 (см. фигуру 4) и координатами z первой 201 и второй 204 заданных точек, соответственно.
Затем может быть выполнена корректировка положения крыла в соответствии с указанными расхождениями.
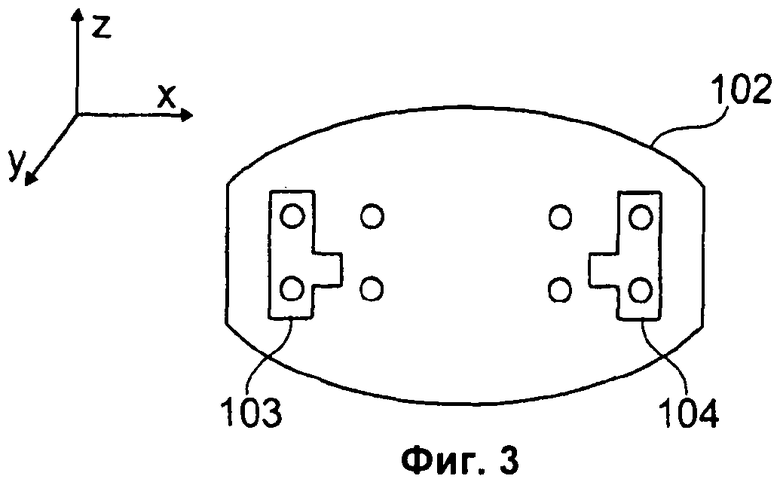
На фигуре 3 показан схематический вид монтажной секции 102, к которой прикреплено первое измерительное устройство 103 и второе измерительное устройство 104.
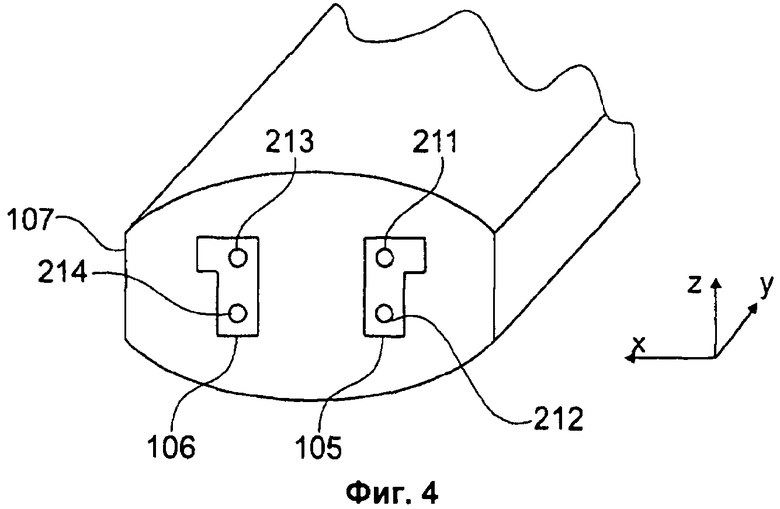
На фигуре 4 приведен схематический вид крыла 107, к которому прикреплены первое позиционирующее устройство 105 и второе позиционирующее устройство 106 в опорных точках 211, 212 и 213, 214, соответственно.
Опорные точки 211, 212 и 213, 214 соответствуют заданным точкам 201, 202 и 204, 205, которые находятся на монтажной секции 102 фюзеляжа 101.
На фигуре 5 приведен схематический вид измерительных устройств 103, 104 и позиционирующих устройств 105, 106, которые установлены относительно измерительных устройств 103, 106 с помощью соответствующих проставок 301, 302.
Проставки 301, 302 могут иметь толщину ΔZ1 и ΔZ2, например, равную 20 мм. Однако толщина может быть больше или меньше.
После того как измерительные устройства 103, 104 прикреплены к монтажной секции 102 фюзеляжа 101, позиционирующие устройства 105, 106 прикреплены к крылу 107, и крыло придвинуто к фюзеляжу, могут быть измерены величины ΔZ1 и ΔZ2. Если полученные значения ΔZ1 и ΔZ2 отличаются от требуемой величины, которая может составлять, например, 20 мм, то может быть выполнена дополнительная корректировка положения крыла.
Измерительные устройства или позиционирующие устройства могут содержать канавки или желобки, позволяющие изменять положение крепления. Поэтому проставка 301 всегда может быть зажата между монтажными и позиционирующими устройствами.
На фигуре 6 приведен вид монтажной системы для установки крыла на фюзеляже летательного аппарата в соответствии с одним из вариантов осуществления настоящего изобретения. Монтажная система, представленная на фигуре 6, содержит устройство 601 вывода информации, например монитор компьютера, и устройство 602 ввода информации, например клавиатуру. Кроме того, система содержит процессор 604 и устройство 603 хранения данных, в котором записана программа монтажа крыла на фюзеляж летательного аппарата.
Монтажная система содержит также вычислительный блок 605, предназначенный для определения отклонений ΔZ1 и ΔZ2. Вычислительный блок 605 может также использоваться для определения, например, контакта между лонжероном и крылом или для определения точности положения верхней точки крыла.
Могут использоваться и другие вычислительные блоки.
Монтажная система содержит также устройство 606 монтажа крыла, предназначенное для перемещения и позиционирования крыла 107 относительно фюзеляжа 101.
Процесс перемещения и позиционирования может осуществляться полностью в автоматическом режиме или под управлением оператора (полуавтоматический режим).
На фигуре 7 приведен схематический вид монтажной секции фигуры 1 в первом положении сборки в соответствии с одним из вариантов осуществления настоящего изобретения. Как показано на фигуре, к монтажной секции 102 фюзеляжа прикрепляется позиционирующее устройство 106.
На фигуре 8 представлен схематический вид монтажной секции фигуры 1 во втором положении сборки в соответствии с одним из вариантов осуществления настоящего изобретения. Как можно видеть, к монтажной секции 102 фюзеляжа на заданном расстоянии от измерительного устройства 104 прикрепляется измерительное устройство 104 (например, путем переноса отверстий с фюзеляжа на измерительное устройство 104). Это расстояние определяется проставкой 302.
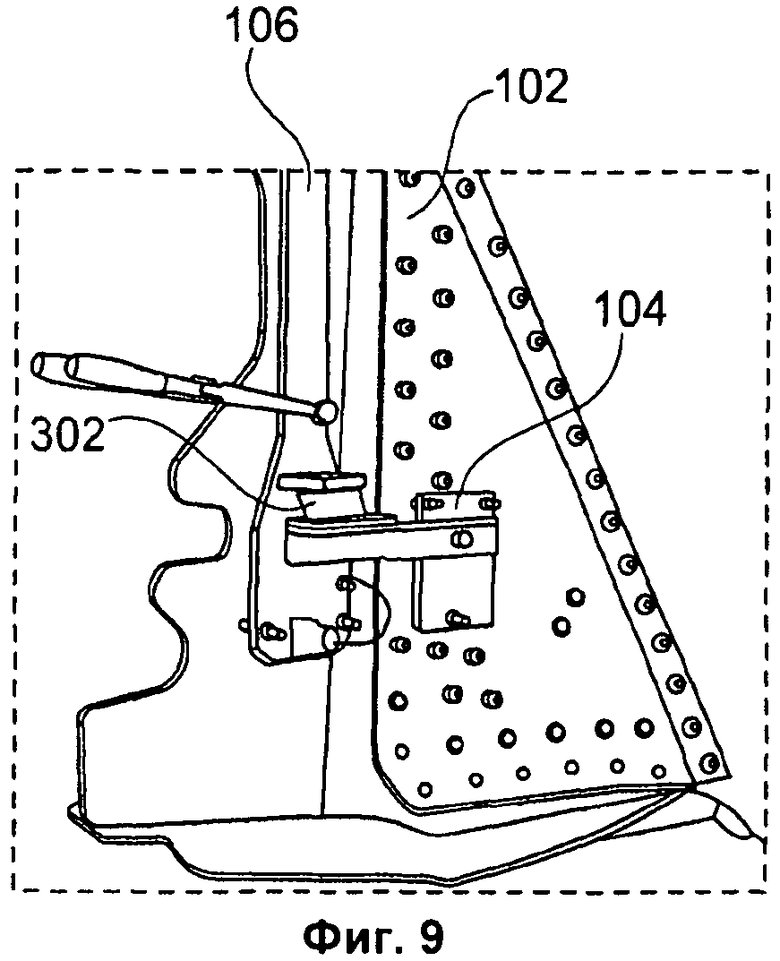
На фигуре 9 приведен схематический вид монтажной секции фигуры 1 в третьем положении сборки, когда все три элемента 102, 104 и 104 собраны на монтажной секции.
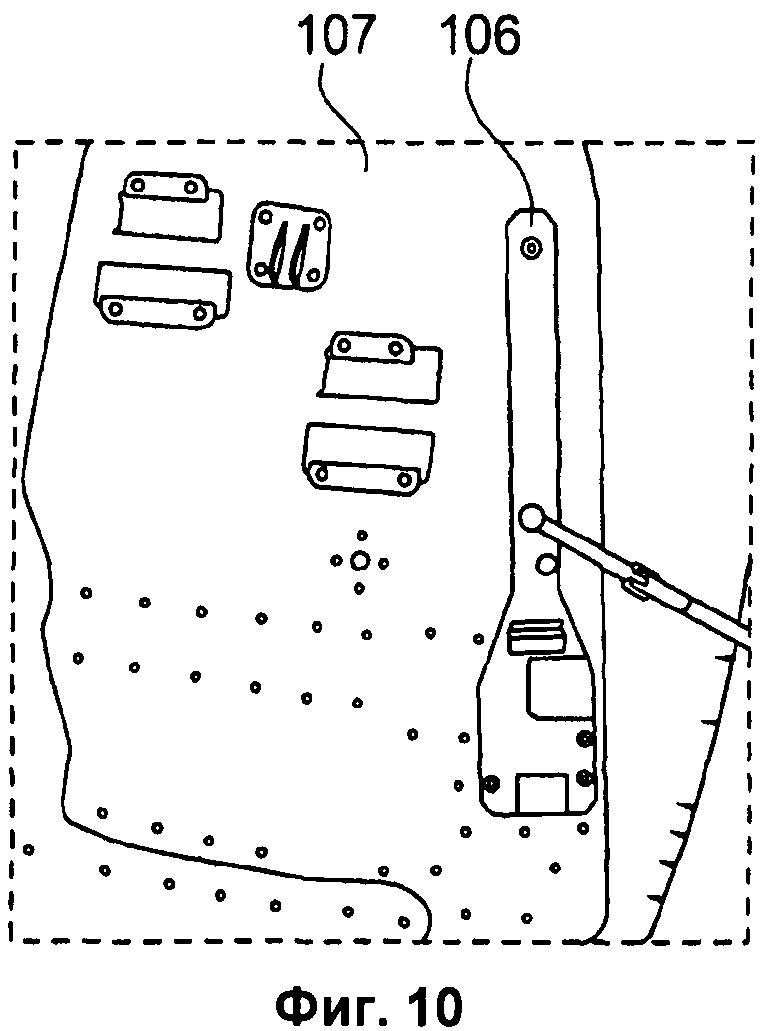
На фигуре 10 приведен схематический вид крыла фигуры 4 в четвертом положении сборки в соответствии с одним из вариантов осуществления настоящего изобретения. Как можно видеть, позиционирующее устройство 106 прикреплено к крылу 107, например, с использованием перенесенных отверстий.
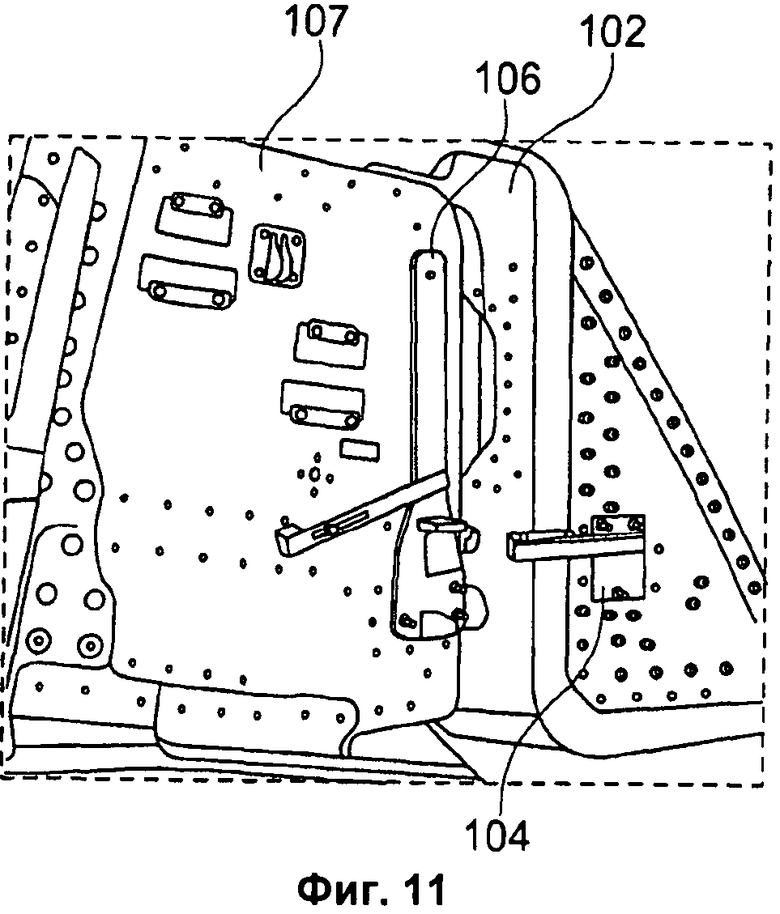
На фигуре 11 приведен схематический вид монтажной секции фигуры 1 и крыла фигуры 4 в пятом положении сборки в соответствии с одним из вариантов осуществления настоящего изобретения. Как можно видеть, крыло 107 придвинуто к секции 102 фюзеляжа для окончательного монтажа. Используя измеренную разность ΔZ между действительной координатой z позиционирующего устройства 106 и координатой z измерительного устройства 104, соответствующей требуемой координате z за вычетом высота проставки 302, может быть выполнена корректировка положения крыла 107 относительно фюзеляжа.
Группа изобретений относится к способу и системе для монтажа крыла на фюзеляже летательного аппарата, а также процессору для монтажа крыла. Способ включает прикрепление к фюзеляжу первого измерительного устройства, установку первого позиционирующего устройств, перенос метки положения на первое позиционирующее устройство, перемещение крыла по направлению к фюзеляжу, определение первого расхождения между первой действительной координатой z первой опорной точки крыла и первой требуемой координатой z первой опорной точки. На первом позиционирующем устройстве выполняется метка положения, прикрепление первого позиционирующего устройства к крылу, так что положение метки положения соответствует положению первой опорной точки крыла. Процессор обеспечивает осуществление вышеуказанных операция способа. Монтажная система обеспечивает выполнение операций вышеуказанного способа. Технический результат заключается в улучшении процесса регулировки положения крыла. 3 н. и 7 з.п. ф-лы, 11 ил.
1. Способ монтажа крыла на фюзеляже летательного аппарата, включающий прикрепление к фюзеляжу (101) первого измерительного устройства (103), установку первого позиционирующего устройства (105) в заданном положении относительно первого измерительного устройства (103), перенос метки положения, находящейся на фюзеляже (101) в первой требуемой координате z (201) первой опорной точки крыла (211), на первое позиционирующее устройство (105), в результате чего на первом позиционирующем устройстве (105) выполняется метка положения, прикрепление первого позиционирующего устройства (105) к крылу (107), так что положение метки положения соответствует положению первой опорной точки крыла (211), перемещение крыла по направлению к фюзеляжу, определение первого расхождения между первой действительной координатой z первой опорной точки (211) крыла и первой требуемой координатой z (201) первой опорной точки (211), которое выполняется с помощью первого измерительного устройства (103), прикрепленного к фюзеляжу (101), и первого позиционирующего устройства (105), прикрепленного к крылу (107).
2. Способ по п.1, включающий дополнительно определение второго расхождения между второй действительной координатой z второй опорной точки крыла (213) и второй требуемой координатой z (204) второй опорной точки крыла (213), причем определение второго расхождения выполняется с помощью второго измерительного устройства (104), прикрепленного к фюзеляжу (101), и второго позиционирующего устройства (106), прикрепленного к крылу (107).
3. Способ по п.1 или 2, включающий дополнительно корректировку положения крыла (107) относительно фюзеляжа (101) в соответствии с первым и/или вторым расхождением.
4. Способ по п.1, в котором метка положения представляет собой отверстие.
5. Способ по п.4, в котором установку первого позиционирующего устройства (105) в определенном положении относительно первого измерительного устройства (103) осуществляют с помощью проставки (301).
6. Способ по п.1, включающий дополнительно корректировку положения крыла (107) в соответствии с положением его самой верхней точки.
7. Способ по п.1, включающий дополнительно корректировку положения крыла (107) в соответствии с определением контакта лонжерона (108) и крыла (107).
8. Способ по п.1, в котором определение первого расхождения выполняется с помощью электронного вычислительного устройства (605).
9. Процессор (604), предназначенный для монтажа крыла (107) на фюзеляже (101) летательного аппарата путем выполнения следующих стадий: прикрепление к фюзеляжу (101) первого измерительного устройства (103), установка первого позиционирующего устройства (105) в заданном положении относительно первого измерительного устройства (103), перенос метки положения, на фюзеляже (101) в первой требуемой координате z (201) первой опорной точки крыла (211), на первое позиционирующее устройство (105), в результате чего на первом позиционирующем устройстве (105) выполняется метка положения, прикрепления первого позиционирующего устройства (105) к крылу (107), так что положение метки положения соответствует положению первой опорной точки крыла, перемещение крыла по направлению к фюзеляжу, определение первого расхождения между первой действительной координатой z первой опорной точки (211) крыла и первой требуемой координатой z (201) первой опорной точки (211), которое выполняется с помощью первого измерительного устройства (103), прикрепленного к фюзеляжу (101), и первого позиционирующего устройства (105), прикрепленного к крылу (107).
10. Монтажная система для монтажа крыла на фюзеляже летательного аппарата, обеспечивающая выполнение следующих стадий: прикрепление к фюзеляжу (101) первого измерительного устройства (103), установка первого позиционирующего устройства (105) в заданном положении относительно первого измерительного устройства (103), перенос метки положения, находящейся на фюзеляже (101) в первой требуемой координате z (201) первой опорной точки крыла (211), на первое позиционирующее устройство (105), в результате чего на первом позиционирующем устройстве (105) выполняется метка положения, прикрепление первого позиционирующего устройства (105) к крылу (107), так что положение метки положения соответствует положению первой опорной точки крыла, перемещение крыла по направлению к фюзеляжу, вычислительный блок (605) для определения первого расхождения между первой действительной координатой z крыла первой опорной точки (211) крыла и первой требуемой координатой z (201) первой опорной точки (211) крыла, причем определение первого расхождения выполняется с помощью первого измерительного устройства (103), прикрепленного к фюзеляжу (101), и первого позиционирующего устройства (105), прикрепленного к крылу (107).
| УНИВЕРСАЛЬНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ БАЗИРОВАНИЯ КРУПНОГАБАРИТНЫХ ОБВОДООБРАЗУЮЩИХ ДЕТАЛЕЙ, ИХ МЕХАНИЧЕСКОЙ ОБРАБОТКИ И СБОРКИ И СПОСОБ БАЗИРОВАНИЯ КРУПНОГАБАРИТНЫХ ОБВОДООБРАЗУЮЩИХ ДЕТАЛЕЙ, ИХ МЕХАНИЧЕСКОЙ ОБРАБОТКИ И СБОРКИ | 1999 |
|
RU2165836C2 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КРЫЛА НА ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1996 |
|
RU2097284C1 |
| Григорьев В.П., Ганиханов Ш.Ф | |||
| Приспособления для сборки узлов и агрегатов самолетов и вертолетов | |||
| - М.: Машиностроение, 1977, с.68-70 | |||
| Устройство для защиты от замыкания фазы на землю в сети переменного тока | 1981 |
|
SU957336A1 |
| АГРЕГАТ ДЛЯ ОБЪЕМНОЙ ЗАКАЛКИ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ ИЛИ ДРУГИХ ПРОКАТНЫХ ПРОФИЛЕЙ | 0 |
|
SU176943A1 |
| Способ фрикционно-упрочняющей обработки | 1986 |
|
SU1447644A1 |
| Новый политехнический словарь | |||
| /Гл | |||
| ред | |||
| Ишлинский | |||
| - М.: Большая Российская | |||

