ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к автоматизированным динамическим производственным системам и соответствующим способам.
УРОВЕНЬ ТЕХНИКИ
[0001] Роботизированные системы широко используются при производстве автомобилей и других устройств. Такие системы как правило используют роботов одного задания, которые предназначены для выполнения одного и того же повторяющегося задания на множестве деталей, перемещающихся по конвейерной линии сборки. Такие системы не позволяют производить масштабирование при производстве крупных узлов в таких отраслях, как аэрокосмическая промышленность, вследствие размера указанных деталей и узлов. Для роботизированных систем, используемых в аэрокосмической промышленности, требуются крупные, дорогие зажимные приспособления, с тем чтобы закреплять приспособления, указанный аппарат и робота в пространстве. Такие зажимные приспособления часто включают в себя сложную кабельную сеть, используемую для подачи питания в роботизированные системы, и часто закрепляются на месте болтами, что приводит к образованию очень неподвижной системы. Эти приспособления требуются для того, чтобы обеспечить необходимое выравнивание робота относительно аппарата, и точное выполнение задания определяется нахождением аппарата в том месте пространства, в котором по предположению робота находится аппарат. Допуски в аэрокосмической промышленности часто значительно меньше, чем в автомобильной промышленности, что дополнительно осложняет использование роботизированных систем.
[0002] Кроме того, производственные процессы в аэрокосмической промышленности часто осуществляют в условиях открытого большого пространства, которое может подвергаться изменениям вследствие вибраций и факторов окружающей среды (например, температуры, влажности и т.п.). Кроме того, изменения, вызываемые износом, или кинематическое изменение вследствие физических ограничений, также могут вносить свой вклад в неточное определение местоположения. Указанное может относиться к любому машинному приспособлению управления перемещением, роботу и/или исполнительному органу. Современные системы управления перемещением и автоматизированные роботизированные системы вследствие присущей им неподвижности сложно приспосабливать к таким изменениям.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0003] Раскрытые в настоящем документе автоматизированные динамические производственные системы могут способствовать устранению одного или более из этих и/или других недостатков в данной области техники. Например, раскрытые в настоящем документе производственные системы могут привести к сокращению необходимой инфраструктуры, облегчению доступа к деталям и внутренним пространствам, уменьшению количества необходимых переделок, улучшению качества получаемых деталей, увеличению гибкости производственного процесса, уменьшению требований к технологической оснастке, уменьшению количества и веса деталей, увеличению экономии затрат, увеличению эффективности сборки, уменьшению отходов, увеличению безопасности и эргономичности для операторов и техников и/или способствовать выработке более производительных технологических маршрутов.
[0004] Например, система для выполнения задания на аппарате может включать в себя указанный аппарат, робота, запас деталей и устройство измерения глобального положения. Запас деталей может включать в себя множество деталей, расположенных отдельно от указанного аппарата. Робот может включать в себя исполнительный орган, при этом исполнительный орган выполнен с возможностью выполнения задания на указанном аппарате с использованием одной или более из указанного множества деталей. Робот может включать в себя устройство измерения локального положения, выполненное с возможностью размещения исполнительного органа относительно указанного аппарата с использованием системы локального видеонаблюдения (например, с помощью замкнутого контура обратной связи) таким образом, что исполнительный орган достаточно выровнен с указанным аппаратом для выполнения задания. Устройство измерения глобального положения может быть выполнено с возможностью отслеживания положений указанного аппарата, робота и запаса деталей с использованием системы глобального видеонаблюдения. Кроме того, устройство измерения глобального положения может быть выполнено с возможностью передачи данных роботу (например, с использованием замкнутого контура обратной связи) о положениях указанного аппарата и запаса деталей и приема обратной связи касательно фактических положений робота, указанного аппарата и запаса деталей. Устройство измерения локального положения может быть выполнено с возможностью дополнения устройства измерения глобального положения при размещении исполнительного органа относительно указанного аппарата и запаса деталей, так что исполнительный орган может выполнить задание на указанном аппарате или в отношении него. Такие раскрытые в настоящем документе системы могут быть использованы для создания динамических каналов связи между различными гибкими производственными ячейками одной производственной базы.
[0005] Раскрыты также способы выполнения производственного задания с использованием раскрытых в настоящем документе систем. В целом, раскрытые в настоящем документе способы могут обеспечивать установку модульных компонентов, сборочные процессы (например, для крыла или фюзеляжа) в условиях открытой среды и с использованием динамической системы, в которой все компоненты могут быть выполнены с возможностью перемещения относительно друг друга. Некоторые способы могут обеспечивать сборку систем или подсистем, системную или структурную интеграцию (например, связывание друг с другом двух или более систем или подсистем) и/или испытание. Например, способ осуществления производственного процесса может включать в себя прием информации о грубом выравнивании от устройства измерения глобального положения, при этом устройство измерения глобального положения выполнено с возможностью отслеживания относительного положения каждого из следующих объектов: аппарат, робот и запас деталей. Указанный способ может кроме того включать в себя выполнение общего выравнивания указанного аппарата, робота и запаса деталей, прием информации о локальном выравнивании от устройства измерения локального положения, присоединенного к роботу, и выполнение точного выравнивания исполнительного органа, присоединенного к роботу, при этом исполнительный орган выполнен с возможностью выполнения первого задания на указанном аппарате.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] На ФИГ. 1 показан перспективный вид иллюстративного неисключительного примера воздушного летательного аппарата, который может включать в себя одну или более деталей, систем и/или подсистем, изготовленных с использованием систем и/или способов согласно настоящему раскрытию.
[0007] На ФИГ. 2 приведено схематическое изображение иллюстративных неисключительных примеров автоматизированных, динамических систем для выполнения производственного задания согласно настоящему раскрытию.
[0008] На ФИГ. 3 приведено схематическое изображение иллюстративных неисключительных примеров автоматизированных, динамических систем для выполнения производственного задания согласно настоящему раскрытию.
[0009] На ФИГ. 4 схематически показана блок-схема иллюстративных способов осуществления производственного процесса согласно настоящему раскрытию.
[00010] На ФИГ. 5 схематически показана блок-схема иллюстративных способов осуществления производственного процесса согласно настоящему раскрытию.
[00011] На ФИГ. 6 схематически показана блок-схема иллюстративных способов осуществления производственного процесса согласно настоящему раскрытию.
[00012] На ФИГ. 7 схематически показана блок-схема иллюстративных способов осуществления производственного процесса согласно настоящему раскрытию.
[00013] На ФИГ. 8 приведено схематическое изображение иллюстративных неисключительных примеров автоматизированных, динамических систем для выполнения производственного задания, согласно настоящему раскрытию.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[00014] В настоящем документе раскрыты автоматизированные динамические производственные системы и соответствующие способы. Такие раскрытые в настоящем документе системы и способы могут быть использованы в производственных процессах, таких как постройка воздушного летательного аппарата или другого крупного аппарата и/или его компонентов, или подсистем. В некоторых примерах такие системы и/или способы могут быть использованы при изготовлении аппарата, такого как аппарат 100, схематически проиллюстрированный на ФИГ. 1. Например, аппарат 100 может включать в себя одну или более деталей 102, систем 104 и/или подсистем 106, изготовленных с использованием систем и/или способов согласно настоящему раскрытию. Системы 104 и подсистемы 106 могут включать в себя, например, электрические системы и подсистемы, системы и подсистемы управления полетом, системы и подсистемы двигателей, системы и подсистемы шасси, гидравлические системы и подсистемы, системы и подсистемы авиационного электронного оборудования, топливные системы и подсистемы, навигационные системы и подсистемы, системы и подсистемы связи, системы и подсистемы охлаждения, системы и подсистемы контрольно-измерительного оборудования и записи, масляные системы и подсистемы, кислородные системы и подсистемы, системы и подсистемы предотвращения обледенения, системы и подсистемы наддува, системы и подсистемы аварийного оборудования, пневматические системы и подсистемы, системы и подсистемы силовой установки, системы и подсистемы предупреждения, осветительные системы и подсистемы, полетные развлекательные системы и подсистемы, системы и подсистемы посадки и/или любые другие системы или подсистемы.
[00015] Аппарат 100 может быть выполнен в форме пассажирского воздушного летательного аппарата 101; однако другие аппараты 100 находятся в пределах объема настоящего изобретения, и настоящее изобретение не ограничивается воздушными летательными аппаратами и использованием в авиационной промышленности. Например, в качестве иллюстративных неисключительных примеров, другие аппараты 100, которые могут быть сконструированы с использованием систем и/или способов согласно настоящему раскрытию, включают в себя (но без ограничения) водные суда, наземные транспортные средства, космические летательные аппараты, автомобили, военные транспортные средства и/или любой другой аппарат. Более того, воздушный летательный аппарат 101 может быть выполнен в любой подходящей форме, включая коммерческий воздушный летательный аппарат, военный воздушный летательный аппарат, частный воздушный летательный аппарат или любой другой подходящий воздушный летательный аппарат. Хотя на ФИГ. 1 показан воздушный летательный аппарат 101 в форме воздушного летательного аппарата с фиксированным крылом, любые другие типы и конфигурации воздушного летательного аппарата находятся в пределах объема воздушного летательного аппарата 101 согласно настоящему раскрытию, включая (но без ограничения) вертолеты.
[00016] Воздушный летательный аппарат 101 может включать в себя фюзеляж 108, который в настоящем документе также может быть назван цилиндрическим элементом 108 и который в целом соответствует основному корпусу воздушного летательного аппарата 101 для размещения пассажиров, экипажа, груза и/или оборудования, например, в зависимости от конкретной конфигурации и/или функции воздушного летательного аппарата 101. Обычно, хотя не обязательно, фюзеляж 108 воздушного летательного аппарата 101 выполнен удлиненным и несколько цилиндрическим или трубчатым. В некоторых вариантах реализации фюзеляж 108 может быть изготовлен из множества секций, которые продольно разнесены вдоль фюзеляжа 108 и функционально соединены друг с другом с образованием фюзеляжа 108.
[00017] Воздушный летательный аппарат 101 также может включать в себя крылья 110, горизонтальные стабилизаторы 112 и вертикальные стабилизаторы 114, каждый из которых может быть выполнен в виде единой конструкции или в виде подсекций, которые затем собираются вместе. Один или более из следующих объектов: фюзеляж 108, крыло 110, горизонтальный стабилизатор 112, вертикальный стабилизатор 114 или его конструктивная подсекция - могут быть выполнены с использованием систем и/или способов согласно настоящему раскрытию. Например, в традиционных способах крылья 110 выполняют посредством установки верхней обшивки 116 и нижней обшивки 118 на лонжеронах 120 крыла, что требует производственных этапов, которые после такой сборки необходимо выполнять на внутренней части крыла 110 через небольшие отверстия доступа, выполненные в крыле 110. Такие методы эргономически и технически сложны для осуществления и, кроме того, являются трудоемкими. Раскрытые в настоящем документе автоматизированные динамические производственные системы и связанные с ними способы могут обеспечить выполнение таких производственных этапов с использованием роботизированных систем (например, автоматизированных роботизированных систем и/или систем ручного управления перемещением для размещения объектов в пространстве).
[00018] На ФИГ. 2 в схематической форме показаны автоматизированные динамические производственные системы 122 (которые в настоящем документе также могут называться производственными системами 122). В целом, производственные системы 122 для изготовления аппарата 124 (который может быть примером аппарата 100) могут включать в себя устройство 126 измерения глобального положения, робота 128 и запас деталей 130. Системы 122 могут быть выполнены с возможностью выполнения задания на аппарате 124. В целом, на чертежах элементы, которые вероятно будут использоваться в данном примере, показаны сплошными линиями, а элементы, которые не являются обязательными для данного примера, показаны пунктирными линиями. Тем не менее, элементы, которые показаны сплошными линиями, не являются существенными для всех примеров осуществления настоящего изобретения, и элемент, показанный сплошной линией, может быть исключен из данного примера без отступления от сущности и объема настоящего изобретения.
[00019] Аппарат 124 может представлять собой, например, воздушный летательный аппарат (например, пассажирский воздушный летательный аппарат, такой как воздушный летательный аппарат 101 по ФИГ. 1), или какое-либо другое устройство или его компонент. Например, аппарат 124 может включать в себя компонент, систему, подсистему, конструкцию и/или деталь воздушного летательного аппарата или иное устройство. В конкретных примерах аппарат 124 может включать в себя крыло (например, крыло 110 по ФИГ. 1), фюзеляж (например, фюзеляж 108 по ФИГ. 1), деталь воздушного летательного аппарата или иное устройство (например, деталь 102 по ФИГ. 1), систему воздушного летательного аппарата или иное устройство (например, систему 104 по ФИГ. 1) и/или подсистему воздушного летательного аппарата или другое устройство (например, подсистему 106 по ФИГ. 1). В некоторых примерах аппарат 124 может быть размещен на первом автоматически управляемом транспортном средстве 132, которое может быть выполнено подвижным и с возможностью перемещения аппарата 124 относительно запаса деталей 130, робота 128 и/или устройства 126 измерения глобального положения. Например, первое автоматически управляемое транспортное средство 132 может быть выполнено с возможностью поступательного перемещения аппарата 124 по меньшей мере в двух различных направлениях относительно одного или более из следующего: запас деталей 130, робот 128 и устройство 126 измерения глобального положения. Например, первое автоматически управляемое транспортное средство 132 может быть выполнено с возможностью перемещения аппарата 124 линейно вперед и назад по прямой линии. В других примерах первое автоматически управляемое транспортное средство 132 может быть выполнено с возможностью перемещения аппарата 124 в двух различных перпендикулярных направлениях (например, вдоль оси X и вдоль оси Y, при этом ось X и ось Y перпендикулярны друг другу). В некоторых примерах первое автоматически управляемое транспортное средство 132 может быть выполнено с возможностью перемещения аппарата 124 по меньшей мере в трех различных перпендикулярных направлениях, например, выполнено с возможностью поступательного перемещения аппарата 124 в плоской (например, горизонтальной) плоскости, а также выполнено с возможностью перемещения аппарата 124 в ортогональном направлении (например, вертикальном вверх и вниз). Дополнительно или альтернативно первое автоматически управляемое транспортное средство 132 может быть выполнено с возможностью поворота аппарата 124.
[00020] Первое автоматически управляемое транспортное средство 132 может быть выполнено с возможностью отправки на устройство 126 измерения глобального положения и/или приема от устройства 126 измерения глобального положения данных 152 (которые в настоящем документе также могут называться сигналами обратной связи 152), таких как информация 134 об автоматически управляемом транспортном средстве. Например, первое автоматически управляемое транспортное средство 132 может быть выполнено с возможностью перемещения аппарата 124 в качестве реакции на инструкции, принятые от другого компонента системы 122 (например, в качестве реакции на информацию 134 об автоматически управляемом транспортном средстве, принятую от устройства 126 измерения глобального положения), в качестве реакции на предварительно запрограммированные инструкции и/или в качестве реакции на инструкции, принятые от оператора или пользователя. Информация 134 об автоматически управляемом транспортном средстве может включать в себя сигналы обратной связи 152 от первого автоматически управляемого транспортного средства 132 в устройство 126 измерения глобального положения, инструкции от устройства 126 измерения глобального положения в первое автоматически управляемое транспортное средство 132 (например, инструкции для перемещения аппарата 124 в конкретное положение или на конкретное расстояние) и/или любых других данных, которые могут быть переданы в устройство 126 измерения глобального положения и/или приняты от устройства 126 измерения глобального положения беспроводным образом. Дополнительно или альтернативно аппарат 124 может быть выполнен с возможностью отправки в устройство 126 измерения глобального положения и/или приема от устройства 126 измерения глобального положения данных 152, таких как информация 136 об аппарате. Информация 136 об аппарате может включать в себя, например, сигналы обратной связи о положении аппарата 124, захваченные изображения аппарата 124 и/или какую-либо иную информацию.
[00021] Устройство 126 измерения глобального положения может быть выполнено с возможностью отслеживания положений аппарата 124, робота 128 и/или запаса деталей 130. Устройство 126 измерения глобального положения может в целом включать в себя систему 138 глобального видеонаблюдения, обрабатывающее устройство 140 и/или коммуникационную систему 142. Система 138 глобального видеонаблюдения может быть выполнена с возможностью отслеживания аппарата 124, робота 128 и/или запаса деталей 130. Например, система 138 глобального видеонаблюдения может включать в себя одну или более камер 162 (например, 3D камеры 162), одно или более лазерных устройств 164 и/или какое-либо другое устройство, которое может быть выполнено с возможностью отслеживания положений других компонентов производственной системы 122. Система 138 глобального видеонаблюдения может быть выполнена с возможностью отслеживания относительных положений каждого из следующих объектов: аппарат 124, робот 128 и/или запас деталей 130 относительно друг друга. Дополнительно или альтернативно система 138 глобального видеонаблюдения может быть выполнена с возможностью отслеживания абсолютных положений аппарата 124, робота 128 и/или запаса деталей 130 относительно опорной точки. В некоторых примерах система 138 глобального видеонаблюдения может записывать множество изображений аппарата 124, робота 128 и/или запаса деталей 130 с целью определения положений каждого. В некоторых примерах указанное множество изображений может быть наложено друг на друга с целью определения трехмерных (3D) координат соответствующего компонента (например, множество изображений аппарата 124 может быть наложено друг на друга для определения трехмерных координат положения аппарата 124).
[00022] Система 138 глобального видеонаблюдения может быть выполнена с возможностью отслеживания аппарата 124 и/или первого автоматически управляемого транспортного средства 132. Данные изображений могут содержаться в данных 152 (например, в информации 134 об автоматически управляемом транспортном средстве и/или информации 136 об аппарате). Система 138 глобального видеонаблюдения может использовать систему неподвижных опорных меток, систему активных опорных меток на основе светодиодов и/или бесконтактные опорные метки. В некоторых примерах система 138 глобального видеонаблюдения может включать в себя систему измерений на основе множества светодиодов. Система 138 глобального видеонаблюдения может быть выполнена с возможностью хранения системы координат деталей и, при необходимости, отслеживания каждого из следующих объектов: аппарат 124, робот 128 и/или запас деталей 130 с целью создания точек данных для каждого объекта в этой системе координат деталей. Устройство 126 измерения глобального положения может включать в себя предварительно запрограммированную информацию о геометрии каждого из следующих объектов: аппарат 124, робот 128 и/или запас деталей 130, и может комбинировать такую предварительно запрограммированную информацию о геометрии с данными, полученными с помощью системы 138 глобального видеонаблюдения, с целью отслеживания каждого из следующих объектов: аппарат 124, робот 128 и/или запас деталей 130. Аналогичным образом, система 138 глобального видеонаблюдения может быть выполнена с возможностью отслеживания робота 128, третьего автоматически управляемого транспортного средства 146, на котором робот 128 размещен в заданном положении, запаса деталей 130 и/или четвертого автоматически управляемого транспортного средства 148, на котором запас деталей 130 размещен в заданном положении. Один или более из следующих объектов: первое автоматически управляемое транспортное средство 132, второе автоматически управляемое транспортное средство 144, на котором устройство 126 измерения глобального положения может быть размещено в заданном положении, третье автоматически управляемое транспортное средство 146, и четвертое автоматически управляемое транспортное средство 148 - могут быть выполнены автоматизированными и/или могут быть выполнены с возможностью ручного управления перемещением таким образом, что они обладают возможностью размещения в пространстве в качестве реакции на принятые телеметрические команды.
[00023] Как показано на ФИГ. 2, обрабатывающее устройство 140 может принимать данные от системы 138 глобального видеонаблюдения с целью определения положений аппарата 124, робота 128, запаса деталей 130, первого автоматически управляемого транспортного средства 132, второго автоматически управляемого транспортного средства 144, третьего автоматически управляемого транспортного средства 146 и/или четвертого автоматически управляемого транспортного средства 148 (совместно именуемых компонентами 150 системы), а также любых необходимых корректировок выравнивания каждого по отношению к другим. Обрабатывающее устройство 140 может быть выполнено с возможностью преобразования информации, полученной на основе отслеживания положений аппарата 124, робота 128 и/или запаса деталей 130, в первые инструкции для перемещения аппарата 124, вторые инструкции для перемещения робота 128 и/или третьи инструкции для перемещения запаса деталей 130. Например, обрабатывающее устройство 140 может быть выполнено с возможностью сохранения единичной матрицы координат для каждого компонента 150 системы и создания обновленной матрицы для преобразования и/или поворота одного или более компонентов 150 системы в качестве реакции на информацию, полученную от системы 138 глобального видеонаблюдения и/или коммуникационного устройства 142. Коммуникационное устройство 142 может, в свою очередь, осуществлять связь с каждым соответствующим компонентом 150 системы, с тем чтобы переместить соответствующий компонент 150 системы от обрабатывающего устройства 140 в соответствии с инструкциями.
[00024] Например, коммуникационное устройство 142 может быть выполнено с возможностью передачи в первое автоматически управляемое транспортное средство 132 инструкций для перемещения аппарата 124 (с осуществлением в результате этого перемещения аппарата 124), может быть выполнено с возможностью передачи в третье автоматически управляемое транспортное средство 146 инструкций для перемещения робота 128 (с осуществлением в результате этого перемещения робота 128) и/или может быть выполнено с возможностью передачи в четвертое автоматически управляемое транспортное средство 148 инструкций для перемещения запаса деталей 130 (с осуществлением в результате этого перемещения запаса деталей 130). Таким образом, устройство 126 измерения глобального положения может быть выполнено с возможностью осуществления грубого выравнивания одного или более соответствующих компонентов 150 системы относительно одного или более других компонентов системы. Устройство 126 измерения глобального положения (например, коммуникационное устройство 142 устройства 126 измерения глобального положения) может быть выполнено с возможностью обеспечения выдачи и/или приема сигналов обратной связи 152 в режиме реального времени на один или более компонентов 150 системы и/или от одного или более компонентов 150 системы (например, сигналов обратной связи 152 касательно соответствующего положения одного или более соответствующих компонентов 150 системы), при этом сигналы обратной связи 152 могут быть переданы обрабатывающим устройством 140. В некоторых примерах обрабатывающее устройство 140 может использовать сигналы обратной связи 152, принятые от одного или более компонентов 150 системы, с целью обновления инструкций для размещения одного или более компонентов 150 системы и может передавать данные 152 в один или более компонентов 150 системы, содержащих указанные инструкции или иную информацию.
[00025] В некоторых примерах устройство 126 измерения глобального положения может быть по существу неподвижным относительно аппарата 124, робота 128 и/или запаса деталей 130. В других примерах устройство 126 измерения глобального положения может быть размещено на втором автоматически управляемом транспортном средстве 144, которое может быть выполнено с возможностью перемещения устройства 126 измерения глобального положения относительно аппарата 124, робота 128 и/или запаса деталей 130. Например, второе автоматически управляемое транспортное средство 144 может быть выполнено с возможностью поступательного перемещения устройства 126 измерения глобального положения по меньшей мере в двух различных направлениях относительно одного или более из следующего: запас деталей 130, робот 128 и аппарат 124. Например, второе автоматически управляемое транспортное средство 144 может быть выполнено с возможностью перемещения устройства 126 измерения глобального положения линейно вперед и назад по прямой линии. В других примерах второе автоматически управляемое транспортное средство 144 может быть выполнено с возможностью перемещения устройства 126 измерения глобального положения в двух различных перпендикулярных направлениях (например, вдоль оси X и вдоль оси Y, при этом ось X и ось Y перпендикулярны друг другу). В некоторых примерах второе автоматически управляемое транспортное средство 144 может быть выполнено с возможностью перемещения устройства 126 измерения глобального положения по меньшей мере в трех различных перпендикулярных направлениях, например, выполнено с возможностью поступательного перемещения устройства 126 измерения глобального положения в плоской (например, горизонтальной) плоскости, а также выполнено с возможностью перемещения устройства 126 измерения глобального положения в ортогональном направлении (например, вертикальном вверх и вниз). Дополнительно или альтернативно второе автоматически управляемое транспортное средство 144 может быть выполнено с возможностью поворота устройства 126 измерения глобального положения.
[00026] Робот 128 может включать в себя автоматизированного робота и/или систему ручного управления перемещением, выполненную с возможностью размещения объектов в пространстве. Робот 128 может включать в себя исполнительный орган 154, который может быть выполнен с возможностью выполнения одного или более заданий на аппарате 124. Например, к исполнительному органу 154 может быть присоединено приспособление 156, которое может быть использовано для выполнения одного или более заданий на аппарате 124. В других примерах исполнительный орган 154 может непосредственно выполнить задание без приспособления 156. Исполнительный орган 154 может включать в себя складной манипулятор, телескопический манипулятор, выдвижной манипулятор, конструкцию типа змееподобного робота, шарнирный манипулятор и/или любую конструкцию, которая может быть выполнена с возможностью размещения исполнительного органа 154 и/или приспособления 156 в заданном положении. Исполнительный орган 154 и/или приспособление 156 могут включать в себя сварочную головку, пистолет для окрашивания разбрызгиванием, скальпель, режущее устройство, крепежное устройство, устройство захвата, зажимные губки, клешневые схваты, штифты, иглы, устройство отсасывания, камеру, шлифовальное устройство, устройство для нанесения адгезива, кисть, дрель, магнит, отвертку, зажим, приспособление для удаления заусенцев, вращающееся соединение и/или любое приспособление, изготовленное по техническим условиям заказчика и предназначенное для выполнения конкретного задания. Различные приспособления 156 и/или исполнительные органы 154 могут быть присоединены к роботу 128 с целью выполнения различных заданий. Таким образом, робот 128 может быть выполнен с возможностью выполнения множества различных заданий на аппарате 124 или в отношении него, с использованием множества различных приспособлений 156 и/или исполнительных органов 154, каждый из которых выполнен с возможностью выполнения отличающегося задания.
[00027] Приспособление 156 и/или исполнительный орган 154 могут быть выполнены с возможностью извлечения из робота 128 таким образом, что на нем может быть осуществлено размещение приспособления или исполнительного органа различного типа для выполнения отличающегося задания. В некоторых примерах исполнительный орган 154 и/или приспособление 156 могут выполнять задание с использованием одной или более деталей 158 из запаса деталей 130. Например, робот 128 может быть выполнен с возможностью выполнения задания по перегрузке, при этом соответствующую деталь 158 извлекают из запаса деталей 130, перемещают к месту возле аппарата 124 и присоединяют к аппарату 124. Указанная операция затем может быть повторена со второй соответствующей деталью 158, которая может быть размещена в другом месте на аппарате 124. Робот 128, исполнительный орган 154 и приспособление 156 могут быть выполнены с возможностью выполнения любого подходящего задания, включая, но без ограничения: перемещение одной или более деталей 158, перемещение аппарата 124, перемещение робота 128, перемещение исполнительного органа 154, перемещение приспособления 156, установка компонента, такого как соответствующая деталь 158, процесс сборки, системную интеграцию, испытание, механическую обработку, выкладку слоев, окрашивание, уплотнение, изготовление, контроль за обеспечением качества, проверку и/или подтверждение.
[00028] Робот 128 может включать в себя устройство 160 измерения локального положения, выполненное с возможностью размещения исполнительного органа 154 и/или приспособления 156 относительно аппарата 124, запаса деталей 130 и/или устройства 126 измерения глобального положения. Устройство 160 измерения локального положения может включать в себя систему 166 локального видеонаблюдения, которая может включать в себя одну или более камер 162 (например, 3D камеру 162) и/или одно или более лазерных устройств 164. В некоторых примерах устройство 160 измерения локального положения может быть выполнено с возможностью выполнения точного выравнивания исполнительного органа 154 и/или приспособления 156 относительно аппарата 124 и/или запаса деталей 130. Например, устройство 126 измерения глобального положения может разместить исполнительный орган 154 в примерном положении возле аппарата 124, а устройство 160 измерения локального положения может быть выполнено с возможностью размещения исполнительного органа 154 с более высоким разрешением (например, с меньшими допусками), чем устройство 126 измерения глобального положения. Робот 128 также может включать в себя локальное обрабатывающее устройство 168 и/или коммуникационное устройство 170 робота для преобразования данных, принятых от устройства 160 измерения локального положения, приема инструкций от устройства 126 измерения глобального положения и/или обеспечения подачи сигналов обратной связи 152 (например, с помощью замкнутого контура обратной связи) на устройство 126 измерения глобального положения относительно положения робота 128, исполнительного органа 154 и/или приспособления 156.
[00029] Устройство 160 измерения локального положения может находиться близко и/или быть присоединено к роботу 128, исполнительному органу 154 и/или приспособлению 156 и может быть выполнено с возможностью дополнения устройства 126 измерения глобального положения при выравнивании компонентов 150 системы относительно друг друга с целью выполнения одного или более заданий. Например, устройство 160 измерения локального положения может быть выполнено для повышения точности размещения исполнительного органа 154 и/или приспособления 156 по сравнению с использованием только устройства 126 измерения глобального положения. В некоторых примерах устройство 160 измерения локального положения может быть выполнено с возможностью размещения исполнительного органа 154 и/или приспособления 156 с более высоким разрешением, чем устройство 126 измерения глобального положения. Например, устройство 160 измерения локального положения может быть выполнено с возможностью выполнения размещения с разрешением, которое по меньшей мере в два раза, по меньшей мере в пять раз, по меньшей мере в десять раз и/или по меньшей мере в двадцать раз выше, чем разрешение, обеспечиваемое устройством 126 измерения глобального положения. В некоторых производственных системах устройство 160 измерения локального положения может быть выполнено с возможностью размещения исполнительного органа 154 и/или приспособления 156 в пределах определенных допусков, например, с допуском 0,1 дюйма (2,5 мм), с допуском 0,05 дюйма (1,25 мм), с допуском 0,01 дюйма (0,25 мм), с допуском 0,005 дюйма (0,125 мм) и/или с допуском 0,001 дюйма (0,025 мм) относительно заданного положения или выравнивания.
[00030] Робот 128 может быть подвижным роботом 128 в некоторых производственных системах 122 (например, весь робот 128 может быть выполнен с возможностью перемещения относительно аппарата 124, устройства 126 измерения глобального положения и/или запаса деталей 130 в качестве реакции на телеметрическую команду (например, посредством ручного управления перемещением) в качестве реакции на инструкции, принятые от устройства 126 измерения глобального положения и/или в качестве реакции на автоматизированный или предварительно запрограммированный процесс, сохраненный внутри робота 128 или вычисленный роботом 128). Дополнительно или альтернативно робот 128 может быть размещен на третьем автоматически управляемом транспортном средстве 146, которое может быть выполнено с возможностью перемещения робота 128 относительно аппарата 124, устройства 126 измерения глобального положения и/или запаса деталей 130. Например, третье автоматически управляемое транспортное средство 146 может быть выполнено с возможностью поступательного перемещения робота 128 по меньшей мере в двух различных направлениях относительно одного или более из следующего: запас деталей 130, устройство 126 измерения глобального положения и аппарат 124. Например, третье автоматически управляемое транспортное средство 146 может быть выполнено с возможностью перемещения робота 128 линейно вперед и назад по прямой линии. В других примерах третье автоматически управляемое транспортное средство 146 может быть выполнено с возможностью перемещения робота 128 в двух различных перпендикулярных направлениях (например, вдоль оси X и вдоль оси Y, при этом ось X и ось Y перпендикулярны друг другу). В некоторых примерах третье автоматически управляемое транспортное средство 146 может быть выполнено с возможностью перемещения робота 128 по меньшей мере в трех различных перпендикулярных направлениях, например, выполнено с возможностью поступательного перемещения робота 128 в плоской (например, горизонтальной) плоскости, а также выполнено с возможностью перемещения робота 128 в ортогональном направлении (например, вертикальном вверх и вниз). Дополнительно или альтернативно третье автоматически управляемое транспортное средство 146 может быть выполнено с возможностью поворота робота 128.
[00031] Такое движение робота 128 на третьем автоматически управляемом транспортном средстве 146 может быть настраиваемым для различных заданий, которые должен выполнять робот 128. Например, при выполнении задания по перегрузке третье автоматически управляемое транспортное средство 146 может быть выполнено с возможностью перемещения робота 128 вперед и назад между запасом деталей 130 и аппаратом 124, при этом
робот 128 выполнен с возможностью получения детали 158 из запаса деталей 130, затем третье автоматически управляемое транспортное средство 146 перемещает робота 128 в заданное положение возле аппарата 124, и после этого робот 128 может разместить соответствующую деталь 158 на аппарате 124. Третье автоматически управляемое транспортное средство 146 также может быть выполнено с возможностью перемещения робота 128 назад в заданное положение возле запаса деталей 130, так что задание может быть повторено множество раз с различными соответствующими деталями 158 из запаса деталей 130 таким образом, что после повторения задания несколько раз множество соответствующих деталей 158 оказываются перемещены из запаса деталей 130 для размещения в соответствующем месте на аппарате 124. Поскольку каждая соответствующая деталь 158 может находиться в немного отличающемся положении в пределах запаса деталей 130 (например, детали 158 могут быть распределены с образованием упорядоченной совокупности, размещены на расстоянии друг от друга в емкости 172), положение исполнительного органа 154 может быть отрегулировано устройством 160 измерения локального положения каждый раз, когда робот 128 возвращается к запасу деталей 130, с тем чтобы каждый раз получить точно соответствующую деталь 158. В случаях такого применения исполнительный орган 154 и/или приспособление 156 могут быть выполнены для перемещения по меньшей мере одной соответствующей детали 158 из запаса деталей 130 к аппарату 124 или по направлению к нему. При нахождении возле аппарата 124, исполнительный орган 154 и/или приспособление 156 могут быть сконфигурированы для присоединения соответствующей детали 158 к аппарату 124.
[00032] Запас деталей 130 может быть размещен отдельно от аппарата 124 (например, не находиться в физическом контакте с аппаратом 124) и может включать в себя одну или более деталей 158. Например, запас деталей 130 может включать в себя множество деталей 158, при этом каждая соответствующая деталь 158 является идентичной. В других примерах запас деталей 130 может включать в себя множество различных деталей 158. Детали 158 могут быть выполнены с возможностью поочередного извлечения из запаса деталей 130 и перемещения к аппарату 124 или по направлению к нему, например, для выполнения задания на детали 158 и/или аппарате 124 (например, при перегрузке деталь 158 может быть извлечена из запаса деталей 130 роботом 128 и перемещена к аппарату 124, где она может быть присоединена к аппарату 124). Запас деталей 130 может включать в себя емкость 172 для размещения или хранения деталей 158. Емкость 172 может представлять собой просто платформу, коробку, поверхность, опорную или любую другую конструкцию, поддерживающую детали 158. Детали 158 могут быть любыми подходящими деталями, которые используются в любом производственном процессе. Например, детали 158 могут включать в себя панели, крепежные элементы, электрические компоненты и/или любые другие детали или конструкции.
[00033] В некоторых примерах запас деталей 130 может быть по существу неподвижным относительно устройства 126 измерения глобального положения, робота 128 и аппарата 124. В альтернативных вариантах реализации изобретения запас деталей 130 может быть размещен на четвертом автоматически управляемом транспортном средстве 148, которое может быть выполнено с возможностью перемещения запаса деталей 130 относительно аппарата 124, устройства 126 измерения глобального положения и/или робота 128. Например, четвертое автоматически управляемое транспортное средство 148 может быть выполнено с возможностью поступательного перемещения запаса деталей 130 по меньшей мере в двух различных направлениях относительно одного или более из следующего: робот 128, устройство 126 измерения глобального положения и аппарат 124. Например, четвертое автоматически управляемое транспортное средство 148 может быть выполнено с возможностью перемещения запаса деталей 130 линейно вперед и назад по прямой линии. В других примерах четвертое автоматически управляемое транспортное средство 148 может быть выполнено с возможностью перемещения запаса деталей 130 в двух различных перпендикулярных направлениях (например, вдоль оси X и вдоль оси Y, при этом ось X и ось Y перпендикулярны друг другу). В некоторых примерах четвертое автоматически управляемое транспортное средство 148 может быть выполнено с возможностью перемещения запаса деталей 130 по меньшей мере в трех различных перпендикулярных направлениях, например, выполнено с возможностью поступательного перемещения запаса деталей 130 в плоской (например, горизонтальной) плоскости, а также выполнено с возможностью перемещения запаса деталей 130 в ортогональном направлении (например, вертикальном вверх и вниз). Дополнительно или альтернативно четвертое автоматически управляемое транспортное средство 148 может быть выполнено с возможностью поворота запаса деталей 130.
[00034] В целом, производственная система 122 (например, все компоненты 150 системы) может быть выполнена с возможностью выполнения задания на аппарате 124 или в отношении него и/или на детали 158 или в отношении нее. Компоненты 150 системы могут быть выполнены с возможностью совместной работы таким образом, что начальное выравнивание может быть выполнено устройством 126 измерения глобального положения, а более точное выравнивание может быть выполнено устройством 160 измерения локального положения на роботе 128. Все компоненты 150 системы могут быть выполнены с возможностью перемещения относительно друг друга таким образом, что производственная система 122 является динамической, благодаря чему исключается необходимость в сложных каркасных и поддерживающих конструкциях, необходимых в способах, известных в данной области техники, для стабилизации компонентов и обеспечения их неподвижности. В отличие от этого, в раскрытых в настоящем документе производственных системах 122 каждый компонент 150 системы может быть выполнен с возможностью перемещения, и при этом устройство 126 измерения глобального положения объединяет систему 122 с отслеживанием положений каждого из компонентов 150 системы. Производственные системы 122 могут быть выполнены полностью автоматизированными таким образом, что задания могут быть выполнены на аппарате 124 или в отношении него и/или на детали 158 и/или в отношении нее (например, может быть выполнено множество различных заданий и/или одно задание может быть выполнено множество раз) без необходимости вмешательства технического специалиста или оператора.
[00035] Такие раскрытые в настоящем документе производственные системы 122 предпочтительно могут быть выполнены с возможностью корректировки изменений, вызываемых износом компонентов 150 системы, вибрацией в производственной среде, факторами окружающей среды (например, температурой, влажностью и т.п.), неидеальности компонентов 150 системы, кинематического изменения вследствие физических ограничений и/или различных моделей, типов, стилей или фирменных знаков компонентов 150 системы. Такая приспособляемость может быть, по меньшей мере частично, обусловлена динамической природой производственных систем 122. Раскрытые в настоящем документе производственные системы 122 могут обеспечивать создание роботизированной производственной системы, для которой не требуется прикрепление компонентов болтами, не требуются крепежные элементы или сложная система кабелей для компонентов системы. Кроме того, каждый робот 128 может обладать возможностью выполнения множества различных заданий благодаря подвижной природе робота 128 и/или третьего автоматически управляемого транспортного средства 146, на котором робот 128 размещен в заданном положении. Раскрытые в настоящем документе производственные системы 122 также могут предпочтительно использоваться для выполнения эргономически сложных или трудоемких операций, например выполняемых через небольшие отверстия доступа в деталях (например, кессонах крыла).
[00036] Раскрытые в настоящем документе производственные системы 122 могут быть использованы для создания динамической производственной среды. Например, при использовании раскрытых в настоящем документе производственных систем 122 гибкие производственные ячейки одной производственной базы могут быть выполнены перенастраиваемыми для различных заданий и/или отраслей промышленности, в отличие от традиционных технологий производства, предусматривающих неподвижное прикрепление (например, производственных роботов, закрепляемых на месте болтами). При использовании раскрытых в настоящем документе производственных систем 122, данный робот 128 и/или исполнительный орган 154 может быть изменен для выполнения отличающегося задания в данной производственной ячейке. Дополнительно или альтернативно производственные системы 122 могут быть выполнены с возможностью активирования связи между производственными ячейками производственной базы (например, устройство 126 измерения глобального положения может быть выполнено с возможностью связи с двумя или более различными роботами 128 в различных производственных ячейках, для выполнения различных заданий на соответствующем аппарате 124 и/или детали 158). Производственные системы 122, которые выполнены с возможностью создания замкнутого контура обратной связи между исполнительным органом 154 и устройством 126 измерения глобального положения, и устройство 160 измерения локального положения может также обеспечивать связь с другими устройствами, что может улучшать рабочие характеристики автоматизированных производственных систем.
[00037] Дополнительно или альтернативно, раскрытые в настоящем документе производственные системы 122 могут быть выполнены с возможностью определения положений различных компонентов 150 системы на основе признаков соответствующего компонента 150 системы, в отличие от известных систем, которые требуют размещения "целей" на указанной детали или аппарате с целью определения их соответствующих положений. Так как раскрытые в настоящем документе производственные системы 122 могут определять положения на основе признаков компонентов, в отличие от использования размещенных целей, определение положения может происходить быстрее и эффективнее (например, в некоторых вариантах количество собранных данных может быть уменьшено).
[00038] Раскрытые в настоящем документе производственные системы 122 могут включать в себя компоненты 150 системы, управляемые датчиками и/или данными. Например, один или более компонентов 150 системы могут быть выполнены с возможностью перемещения в качестве реакции на данные, принятые от одного или более других компонентов 150 системы и/или данные, принятые от устройства ручного управления перемещением. Дополнительно или альтернативно, один или более компонентов 150 системы могут быть выполнены с возможностью перемещения в качестве реакции на данные, собранные одним или более датчиками на соответствующем компоненте 150 системы. Кроме того, в дополнение к связи с устройством 126 измерения глобального положения и/или одним или более других соответствующих компонентов 150 системы, один или более компонентов 150 системы могут быть выполнены с возможностью связи также с другими устройствами. Например, один или более компонентов 150 системы могут быть выполнены с возможностью создания динамического канала связи с одним или более внешними устройствами с передачей трехмерных координат, соответствующих одному или более компонентам 150 системы, в другие устройства и/или системы, например, посредством взаимодействия с устройствами конечного пользователя (например, дополненной реальности, используемой с планшетами и/или головными гарнитурами).
[00039] На ФИГ. 3 показана вторая производственная система 174 согласно настоящему раскрытию, при этом вторая производственная система 174 также является автономной и динамической и выполнена с возможностью выполнения множества заданий на второй детали 176, которая может быть примером детали 158 по ФИГ. 2, аппарата 100 по ФИГ. 1 и/или аппарата 124 по ФИГ. 2. Подвижный робот 178 (который может быть примером робота 128 по ФИГ. 2 и/или автоматически управляемого транспортного средства, такого как первое автоматически управляемое транспортное средство 132 по ФИГ. 2) может быть выполнен с возможностью перемещения детали 176 к множеству станций (например, первой станции 180, второй станции 182, третьей станции 184 и так далее), при этом на каждой соответствующей станции на детали 176 может быть выполнено отличающееся задание, с тем чтобы получить готовую деталь 186. Устройство 126 измерения глобального положения может быть выполнено с возможностью отслеживания положений второй детали 176, подвижного робота 178 и каждой соответствующей станции (например, первой станции 180, второй станции 182 и т.д.), а подвижный робот 178 может быть выполнен с возможностью перемещения второй детали 176 по очереди к каждой из указанного множества станций, с тем чтобы завершить один или более производственных процессов. Подвижный робот 178 может включать в себя устройство 160 измерения локального положения, присоединенное к подвижному роботу 178, который может быть выполнен с возможностью отслеживания и размещения исполнительного органа 154 в заданном положении, который может быть выполнен с возможностью взаимодействия со второй деталью 176, с тем чтобы перемещать ее от станции к станции после выполнения каждого соответствующего задания на второй детали 176. Подвижный робот 178 может включать в себя коммуникационное устройство 170 робота, выполненное с возможностью приема информации от устройства 126 измерения глобального положения относительно положений второй детали 176 и одной или более из указанного множества станций 180, 182, 184.
[00040] В некоторых системах 174 каждая соответствующая станция 180, 182, 184 может включать в себя соответствующего робота задания, выполненного с возможностью выполнения отличающегося задания на второй детали 176. Например, первая станция 180 может включать в себя робота 188 первого задания, вторая станция 182 может включать в себя робота 190 второго задания, третья станция 184 может включать в себя робота 192 третьего задания и т.д. Каждый робот из робота 188 первого задания, робота 190 второго задания и робота 192 третьего задания может быть выполнен с возможностью выполнения отличающегося задания на второй детали 176. Один или более из следующих объектов: подвижный робот 178, первая станция 180, вторая станция 182, третья станция 184, устройство 126 измерения глобального положения и вторая деталь 176 могут быть размещены на соответствующем автоматически управляемом транспортном средстве 194, которое может быть выполнено с возможностью перемещения соответствующего компонента системы относительно других компонентов системы.
[00041] Производственные системы 122 и/или системы 174 могут быть использованы для выполнения разнообразных заданий, способов и/или производственных процессов, например, в способах, используемых при производстве воздушного летательного аппарата. На ФИГ. 4-7 схематически показаны блок-схемы, которые представляют собой неисключительные примеры осуществления таких способов 400, 500, 600, 700 согласно настоящему раскрытию и связанных с производственными системами 122 по ФИГ. 2 и/или системами 174 по ФИГ. 3. Любой из указанных способов по ФИГ. 4-7 может быть использован в производственном процессе, например, при производстве воздушного летательного аппарата. На ФИГ. 4-7 некоторые этапы представлены в прямоугольниках из прерывистых линий, обозначающих возможность использования таких этапов при необходимости, или они могут соответствовать дополнительному варианту способа согласно настоящему раскрытию. Тем не менее, не все способы согласно настоящему раскрытию должны включать в себя этапы, показанные в прямоугольниках из сплошных линий. Способы и этапы, показанные на ФИГ. 4-7, не являются ограничивающими, другие способы и этапы также находятся в пределах объема настоящего изобретения, включая способы, имеющие большее или меньшее количество показанных этапов, как очевидно следует из описания, представленного в настоящем документе.
[00042] На ФИГ. 4 показаны способы 400 осуществления производственного процесса с использованием системы (например, производственной системы 122 по ФИГ. 2 и/или системы 174 по ФИГ. 3). Способы 400 могут включать в себя конфигурирование устройства измерения глобального положения (например, устройства 126 измерения глобального положения по ФИГ. 2) системы с возможностью выполнения общего выравнивания аппарата (например, аппарата 124 по ФИГ. 2 или второй детали 176 по ФИГ. 3), робота (например, робота 128 по ФИГ. 2 и/или подвижного робота 178 по ФИГ. 3) и/или запаса деталей (например, запаса деталей 130 по ФИГ. 2) с использованием устройства измерения глобального положения на этапе 402. Устройство измерения глобального положения может быть выполнено с возможностью отслеживания положений указанного аппарата, робота и запаса деталей, а устройство измерения глобального положения может быть дополнительно выполнено с возможностью выдавать инструкции и вызывать перемещение указанного аппарата, робота и/или запаса деталей относительно устройства измерения глобального положения. Способы 400 также могут включать в себя конфигурирование устройства измерения локального положения (например, устройства 160 измерения локального положения по ФИГ. 2) системы для выполнения локального выравнивания исполнительного органа (например, исполнительного органа 154) робота относительно указанного аппарата на этапе 404, причем устройство измерения локального положения соединено с роботом. Выполнение задания на указанном аппарате или в отношении него может быть активировано на этапе 406 таким образом, что при выполнении задания используются исполнительный орган робота и деталь из запаса деталей. Например, активирование выполнения задания на этапе 406 может включать в себя инициирование работы одного или более компонентов системы (например, компонентов 150 системы по ФИГ. 2), размещение одной или более деталей (например, деталей 158 по ФИГ. 2) в емкости (например, емкости 172 по ФИГ. 2) для образования запаса деталей, обеспечение работы указанного аппарата, обеспечение работы робота, обеспечение работы устройства измерения глобального положения или любого другого предварительного этапа.
[00043] При реализации некоторых способов 400 активирование выполнения задания на этапе 406 может включать в себя активирование робота для автономного выполнения задания, например, посредством установки программного обеспечения, выполняющего его на роботе, путем выдачи роботу инструкций для автономного выполнения задания, программирования робота для автономного выполнения задания и/или любого другого этапа, который может содействовать активированию выполнения одного или более заданий.
[00044] Конфигурирование устройства измерения глобального положения на этапе 402 может включать в себя размещение устройства измерения глобального положения на автоматически управляемом транспортном средстве (например, втором автоматически управляемом транспортном средстве 144 по ФИГ. 2), при этом автоматически управляемое транспортное средство выполнено с возможностью перемещения устройства измерения глобального положения относительно указанного аппарата, запаса деталей и/или робота. Дополнительно или альтернативно конфигурирование устройства измерения глобального положения для выполнения общего выравнивания на этапе 402 может включать в себя конфигурирование устройства измерения глобального положения для выдачи инструкций на перемещение автоматически управляемого транспортного средства с устройством измерения глобального положения, размещенным на нем в заданном положении.
[00045] При реализации некоторых способов 400 конфигурирование устройства измерения глобального положения на этапе 402 может включать в себя конфигурирование устройства измерения глобального положения для автономного регулирования положений устройства измерения глобального положения, робота, запаса деталей и/или указанного аппарата, с целью активирования выравнивания исполнительного органа для необходимого выполнения задания. Конфигурирование устройства измерения глобального положения на этапе 402 может включать в себя конфигурирование устройства измерения глобального положения для отслеживания указанного аппарата, например, посредством конфигурирования устройства измерения глобального положения для совмещения друг с другом множества изображений указанного аппарата с целью определения положения указанного аппарата. При реализации некоторых способов устройство измерения глобального положения может быть подвергнуто конфигурированию на этапе 402 с целью преобразования данных, принятых от одного или более компонентов системы в трехмерные координаты, и отправки трехмерных координат роботу, а устройство измерения локального положения может быть подвергнуто конфигурированию на этапе 404 для регулирования и/или повторного выравнивания исполнительного органа на основе трехмерных координат, принятых от устройства измерения глобального положения.
[00046] Конфигурирование устройства измерения локального положения на этапе 404 может включать в себя размещение робота на другом автоматически управляемом транспортном средстве (например, третьем автоматически управляемом транспортном средстве 146 по ФИГ. 2), при этом автоматически управляемое транспортное средство выполнено с возможностью перемещения робота относительно указанного аппарата, запаса деталей и/или устройства измерения глобального положения. При реализации этих способов конфигурирование устройства измерения глобального положения на этапе 402 может включать в себя конфигурирование устройства измерения глобального положения для выдачи инструкций на перемещение автоматически управляемого транспортного средства с помощью робота, размещенного на нем в заданном положении, с целью изменения положения робота посредством выдачи инструкций для перемещения автоматически управляемого транспортного средства. Дополнительно или альтернативно конфигурирование устройства измерения локального положения на этапе 404 может включать в себя конфигурирование робота и/или автоматически управляемого транспортного средства, на котором робот размещен для обеспечения подачи сигналов обратной связи (например, сигналов обратной связи 152 по ФИГ. 2), с устройством измерения глобального положения, и конфигурирование устройства измерения глобального положения для приема сигналов обратной связи от робота и/или автоматически управляемого транспортного средства, на котором робот размещен в заданном положении. При реализации некоторых способов 400 конфигурирование устройства измерения локального положения на этапе 404 может включать в себя конфигурирование устройства измерения локального положения для выдачи инструкций и вызова поступательного перемещения и/или поворота исполнительного органа.
[00047] Активирование выполнения задания на этапе 406 может включать в себя размещение запаса деталей на автоматически управляемом транспортном средстве (например, четвертом автоматически управляемом транспортном средстве 148 по ФИГ. 2), при этом автоматически управляемое транспортное средство, на котором запас деталей размещен в заданном положении, выполнено с возможностью перемещения запаса деталей относительно указанного аппарата, робота и/или устройства измерения глобального положения. При реализации этих способов конфигурирование устройства измерения глобального положения на этапе 402 может включать в себя конфигурирование устройства измерения глобального положения для выдачи инструкций на перемещение автоматически управляемого транспортного средства с запасом деталей, размещенным на нем в заданном положении, с целью изменения положения запаса деталей посредством выдачи инструкций для перемещения автоматически управляемого транспортного средства, на котором запас деталей размещен в заданном положении. Дополнительно или альтернативно конфигурирование устройства измерения глобального положения на этапе 402 может включать в себя конфигурирование запаса деталей и/или автоматически управляемого транспортного средства, на котором запас деталей размещен для обеспечения подачи сигналов обратной связи в устройство измерения глобального положения, и конфигурирование устройства измерения глобального положения для приема сигналов обратной связи от запаса деталей и/или автоматически управляемого транспортного средства, на котором запас деталей размещен в заданном положении.
[00048] Аналогичным образом, активирование выполнения задания на этапе 406 может включать в себя размещение указанного аппарата на автоматически управляемом транспортном средстве (например, первом автоматически управляемом транспортном средстве 132 по ФИГ. 2), при этом автоматически управляемое транспортное средство, на котором указанный аппарат размещен в заданном положении, выполнено с возможностью перемещения указанного аппарата относительно запаса деталей, робота и/или устройства измерения глобального положения. При реализации этих способов конфигурирование устройства измерения глобального положения на этапе 402 может включать в себя конфигурирование устройства измерения глобального положения для выдачи инструкций на перемещение автоматически управляемого транспортного средства с указанным аппаратом, размещенным на нем в заданном положении, с целью изменения положения указанного аппарата посредством выдачи инструкций для перемещения автоматически управляемого транспортного средства, на котором указанный аппарат размещен в заданном положении. Дополнительно или альтернативно конфигурирование устройства измерения глобального положения на этапе 402 может включать в себя конфигурирование указанного аппарата и/или автоматически управляемого транспортного средства, на котором указанный аппарат размещен для обеспечения подачи сигналов обратной связи в устройство измерения глобального положения (например, сигналов обратной связи от активных датчиков на борту указанного аппарата и/или автоматически управляемого транспортного средства, на котором указанный аппарат размещен в заданном положении), и конфигурирование устройства измерения глобального положения для приема сигналов обратной связи от указанного аппарата и/или автоматически управляемого транспортного средства, на котором указанный аппарат размещен в заданном положении.
[00049] Активирование выполнения задания на этапе 406 может включать в себя активирование выполнения одной или более из следующих операций: перемещение детали, перемещение указанного аппарата, перемещение робота, перемещение исполнительного органа, извлечение соответствующей детали из запаса деталей и перемещение ее к указанному аппарату, соединение соответствующей детали из запаса деталей с указанным аппаратом, установка компонента на указанный аппарат, сборка двух или более соответствующих деталей из запаса деталей, интеграция систем, испытание, механическая обработка, выкладка слоев композиционного материала, окрашивание, уплотнение, изготовление, контроль за обеспечением качества, проверка правильности размещения и подтверждение того, что задание было выполнено правильно (например, перед фактическим размещением детали на указанном аппарате указанная система может выполнить подтверждение того, что деталь будет размещена правильно).
[00050] Хотя способы 400 по ФИГ. 4 могут быть по меньшей мере частично выполнены оператором-человеком или техническим специалистом, способы 500, 600, 700 по ФИГ. 5-7, соответственно, могут быть по меньшей мере частично выполнены автономно, например, посредством раскрытых в настоящем документе производственных систем (например, системы 122 по ФИГ. 2 и/или системы 174 по ФИГ. 3).
[00051] На ФИГ. 5 показаны способы 500 осуществления производственного процесса, которые в целом могут включать в себя выполнение грубых измерений на этапе 502, выполнение общего выравнивания на этапе 504, выполнение точных измерений на этапе 506, прием обратной связи с информацией о положении на этапе 508 (например, с помощью замкнутого контура обратной связи), регулирование и/или выравнивание положения исполнительного органа на этапе 510 и выполнение задания на указанном аппарате на этапе 512. Выполнение точных измерений на этапе 506 может быть выполнено с возможностью дополнения осуществления грубых измерений на этапе 502 с целью динамического регулирования каждого компонента системы (например, компонентов 150 системы по ФИГ. 2) относительно друг друга с целью выполнения задания на этапе 512.
[00052] Выполнение общего выравнивания на этапе 504 может включать в себя перемещение одного или более компонентов системы, такое как перемещение измерительной системы измерений глобального положения на этапе 514, перемещение указанного аппарата на этапе 516, перемещение запаса деталей на этапе 518 и/или перемещение робота на этапе 520. Например, выполнение грубых измерений на этапе 502 может включать в себя грубое отслеживание соответствующих положений компонентов системы (например, отслеживание соответствующих положений указанного аппарата, робота и запаса деталей и/или соответствующего автоматически управляемого транспортного средства, на котором каждый размещен в заданном положении) с использованием системы видеонаблюдения устройства измерения глобального положения, а выполнение общего выравнивания на этапе 504 может включать в себя перемещение одного или более компонентов системы в качестве реакции на информацию о выравнивании от устройства измерения глобального положения. Например, коммуникационное устройство устройства измерения глобального положения может передавать информацию о выравнивании одному или более компонентам системы с целью осуществления или выдачи инструкций на перемещение одного или более компонентов относительно друг друга. Такое выравнивание на этапе 504 может быть выполнено для размещения компонентов системы относительно друг друга и/или может быть выполнено для размещения одного или более компонентов системы в соответствующем абсолютном положении.
[00053] В некоторых примерах выполнение точных измерений на этапе 506 может быть выполнено до и/или после приема обратной связи с информацией о положении на этапе 508. Например, обрабатывающее устройство робота может принимать информацию о локальном выравнивании от устройства измерения локального положения, присоединенного к роботу и выполненного с возможностью отслеживания положения исполнительного органа и/или другого компонента системы. Положение исполнительного органа может быть отрегулировано и/или выровнено относительно одного или более компонентов системы на этапе 510, в качестве реакции на выполнение точных измерений на этапе 506, выполнение грубых измерений на этапе 502 и/или прием обратной связи с информацией о положении на этапе 508. При реализации некоторых способов регулирование и/или выравнивание исполнительного органа на этапе 510 может включать в себя поступательное перемещение исполнительного органа на этапе 522 и/или поворот исполнительного органа на этапе 524. Исполнительный орган может быть выполнен с возможностью выполнения задания на указанном аппарате на этапе 512 и может быть выполнен с возможностью извлечения из робота таким образом, что другой исполнительный орган, выполненный с возможностью выполнения отличающегося задания, может быть присоединен к роботу с формированием таким образом робота, выполненного с возможностью выполнения множества различных заданий на указанном аппарате.
[00054] После того как исполнительный орган робота выровнен в пределах необходимых допусков с указанным аппаратом, задание может быть выполнено один или более раз на этапе 512. Например, выполнение задания на этапе 512 может включать в себя одну или более из следующих операций: перемещение указанной детали на этапе 526, перемещение указанного аппарата на этапе 526, перемещение робота на этапе 528, перемещение исполнительного органа на этапе 528, выполнение операции перегрузки на этапе 530, установка компонента на указанный аппарат на этапе 532, выполнение процесса сборки на этапе 534, выполнение системной интеграции на этапе 536, испытание на этапе 538, механическая обработка на этапе 540, выкладка слоев композиционного материала на этапе 542, окрашивание на этапе 544, уплотнение на этапе 546, изготовление на этапе 548, контроль за обеспечением качества на этапе 550, проверка правильности размещения детали на этапе 552 и/или подтверждение на этапе 554. Выполнение задания на этапе 512 может быть повторено один или более раз на этапе 556, например, повторением одного и того же задания множество раз и/или выполнением множества различных заданий.
[00055] На ФИГ. 6 показаны способы 600 выполнения задания на аппарате (например, аппарате 124 по ФИГ. 2) с использованием одной или более раскрытых в настоящем документе производственных систем. Указанный аппарат может быть подвергнут отслеживанию на этапе 602, например, устройством измерения глобального положения (например, устройством 126 измерения глобального положения по ФИГ. 2), имеющим систему видеонаблюдения (например, систему 138 глобального видеонаблюдения по ФИГ. 2). Например, устройство измерения глобального положения может быть выполнено с возможностью отслеживания одного или более признаков или точек геометрии указанного аппарата с целью грубого определения положения и/или ориентации указанного аппарата. При реализации некоторых способов 600 отслеживание указанного аппарата на этапе 602 может включать в себя наложение друг на друга множества изображений указанного аппарата на этапе 604 с целью определения местоположения указанного аппарата или его части. Отслеживание указанного аппарата на этапе 602 может приводить к получению набора данных, сохраняемых, по меньшей мере временно, устройством измерения глобального положения (например, обрабатывающим устройством 140 устройства 126 измерения глобального положения), и описывающих местоположение указанного аппарата. При реализации некоторых способов устройство измерения глобального положения может быть выполнено с возможностью преобразования указанных данных в трехмерные (3D) координаты на этапе 606. Например, данные, собранные системой видеонаблюдения устройства измерения глобального положения, могут быть использованы обрабатывающим устройством устройства измерения глобального положения для определения матрицы значений, каждое из которых задает компонент положения и/или ориентации указанного аппарата.
[00056] Трехмерные координаты могут быть переданы роботу (например, роботу 128 по ФИГ. 2) на этапе 608. Например, коммуникационное устройство устройства измерения глобального положения (например, коммуникационное устройство 142 общей связи) может передавать трехмерные координаты в коммуникационное устройство локальной связи, размещенное на роботе (например, коммуникационное устройство 170 локальной связи). В качестве реакции на прием трехмерных координат указанного аппарата, робот может быть предварительно запрограммирован для регулирования, изменения положения и/или повторного выравнивания самого себя и/или своего исполнительного органа (например, исполнительного органа 154 по ФИГ. 2) на основе указанных трехмерных координат. Иными словами, после того, как робот принимает информацию о новых координатах от устройства измерения глобального положения (например, с помощью замкнутого контура обратной связи) относительно положения указанного аппарата, робот в качестве реакции на это может изменять свое положение. Такое изменение положения может быть повторено множество раз в качестве реакции на множество наборов новых координат, а в некоторых примерах информация о координатах может быть обновлена множество раз. Робот и/или исполнительный орган может быть отрегулирован и повторно выровнен на этапе 610, который может включать в себя использование устройства измерения локального положения (например, устройства 160 измерения локального положения по ФИГ. 2) для выполнения одной или большего количества точных регулировок положения и/или ориентации исполнительного органа. Таким образом, отслеживание указанного аппарата на этапе 602, преобразование данных в трехмерные координаты на этапе 606, отправка трехмерных координат роботу на этапе 608 и/или регулирование робота и/или исполнительного органа на этапе 610 могут быть подэтапами выполнения измерений глобального положения (например, могут быть подэтапами выполнения грубых измерений на этапе 502 по ФИГ. 5). Регулирование или повторное выравнивание робота и/или исполнительного органа на этапе 610 также может быть подэтапом выполнения местных измерений (например, подэтапом выполнения местных измерений на этапе 506 на ФИГ. 5). После размещения и выравнивания относительно указанного аппарата, исполнительный орган может выполнять задание на указанном аппарате на этапе 612. Например, выполнение задания на указанном аппарате на этапе 612 может включать в себя одно или более из указанных заданий этапа 512 по ФИГ. 5. Хотя этапы по ФИГ. 6 описаны относительно отслеживания указанного аппарата и размещения робота относительно указанного аппарата, дополнительно или альтернативно те же этапы могут быть выполнены относительно запаса деталей (например, робот может принимать трехмерные координаты относительно положения и/или ориентации указанного запаса деталей, а исполнительный орган может быть размещен на основе таких трехмерных координат).
[00057] На ФИГ. 7 показаны способы 700 осуществления производственного процесса, включающие перемещение детали или аппарата к множеству различных станций, где отличающееся задание может быть выполнено на указанной детали или аппарате на каждой соответствующей станции. Способы 700 могут включать в себя размещение детали (например, аппарата 124 и/или детали 158 по ФИГ. 2) на первой станции (например, первой станции 180 по ФИГ. 3) на этапе 702. Размещение указанной детали на первой станции на этапе 702 может быть выполнено вручную, или может быть использован первый робот, такой как подвижный робот или робот, размещенный на автоматически управляемом транспортном средстве, для размещения указанной детали на первой станции или вблизи нее. Первый робот может быть выполнен с возможностью использования информации о положении указанной детали от устройства измерения глобального положения и первого устройства измерения локального положения, присоединенного к первому роботу. Устройство измерения глобального положения (например, устройство 126 измерения глобального положения по ФИГ. 2-3) может быть размещено на расстоянии от первого робота и выполнено с возможностью отслеживания положений первого робота, указанной детали и первой станции. Первое устройство измерения локального положения (которое может быть примером устройства 160 измерения локального положения по ФИГ. 2) может быть выполнено с возможностью отслеживания положения первого исполнительного органа (который может быть примером исполнительного органа 154 по ФИГ. 2), присоединенного к первому роботу. Устройство измерения глобального положения и первое устройство измерения локального положения могут быть выполнены с возможностью совместной работы для размещения указанной детали на первой станции или возле нее.
[00058] Каждая из станций может включать в себя робота задания, размещенного на станции, каждый из роботов задания выполнен с возможностью выполнения отличающегося задания на указанной детали. Например, второй робот, имеющий второй исполнительный орган, может быть размещен на первой станции и выполнен с возможностью выполнения первого задания на указанной детали на этапе 704 после того, как указанная деталь размещена на первой станции. С целью выполнения первого задания на указанной детали на этапе 704 второй робот может быть выполнен с возможностью использования информации о положении указанной детали от устройства измерения глобального положения (которое также может быть выполнено с возможностью отслеживания положения второго робота) и второго устройства измерения локального положения, присоединенного ко второму роботу. Устройство измерения глобального положения также может быть размещено на расстоянии от второго робота и может вместе со вторым устройством измерения локального положения, быть выполнено с возможностью отслеживания положения второго исполнительного органа и детали с целью их совместного выравнивания.
[00059] Указанная деталь может быть перемещена ко второй станции (например, второй станции 182 по ФИГ. 3) на этапе 706, например, посредством использования первого робота для перемещения указанной детали от первой станции ко второй станции. Вторая станция может включать в себя третьего робота, имеющего третий исполнительный орган и третье устройство измерения локального положения, который может быть выполнен с возможностью выполнения второго задания на указанной детали на этапе 708. Устройство измерения глобального положения также может быть размещено на расстоянии от третьего робота и выполнено с возможностью отслеживания положения третьего робота, а третье устройство измерения локального положения может быть присоединено к третьему роботу и выполнено с возможностью отслеживания положения указанной детали и третьего исполнительного органа. Устройство измерения глобального положения и третье устройство измерения локального положения могут быть выполнены с возможностью совместной работы для выравнивания указанной детали и третьего исполнительного органа относительно друг друга, так что второе задание может быть выполнено на указанной детали на этапе 708.
[00060] В целом, выполнение первого задания на этапе 704 может быть выполнено после размещения указанной детали на первой станции на этапе 702, перемещение указанной детали ко второй станции на этапе 706 может быть выполнено после выполнения первого задания на этапе 704, и выполнение второго задания на этапе 708 может быть выполнено после перемещения указанной детали ко второй станции на этапе 706. При реализации некоторых способов указанная деталь может быть извлечена из второй станции после выполнения второго задания на этапе 708 и перемещена к другой соответствующей станции на этапе 710. После размещения и выравнивания, на указанной детали на этапе 712 может быть выполнено другое соответствующее задание. Такие этапы могут быть повторены на этапе 714 любое количество раз (например, любое количество станций может быть включено для выполнения любого количества заданий на указанной детали в способах 700). Указанная деталь, таким образом, может быть перемещена к множеству различных станций, где соответствующее задание из множества заданий может быть выполнено на детали на каждой соответствующей станции. При реализации некоторых способов каждое соответствующее задание может быть выполнено на множестве деталей на каждой соответствующей станции. Например, при реализации некоторых способов указанная деталь является первой деталью, и после перемещения первой детали от первой станции на этапе 706, вторая деталь может быть размещена на первой станции, где первое задание может быть выполнено на второй детали. Аналогичным образом, после перемещения первой детали от второй станции после выполнения второго задания на первой детали, вторая деталь может быть перемещена ко второй станции, и второе задание может быть выполнено на второй детали. Такие способы могут быть повторены любое количество раз на любом количестве деталей, каждая из которых может быть одной и той же деталью или различными деталями. Выполнение первого задания на этапе 704, выполнение второго задания на этапе 708 и/или выполнение другого задания (заданий) на этапе 712 могут быть примерами выполнения задания 512 по ФИГ. 5.
[00061] Со ссылкой на ФИГ. 8 показан неисключительный иллюстративный пример одной производственной системы 122 в форме производственной системы 200. Там где это возможно, ссылочные номера схематических иллюстраций по ФИГ. 2-3 использованы для обозначений соответствующих деталей производственной системы 200; однако пример по ФИГ. 8 является неисключительным и не ограничивает производственные системы 122 проиллюстрированным вариантом реализации по ФИГ. 8. То есть, производственные системы 122 не ограничены конкретным вариантом реализации проиллюстрированной производственной системы 200, и производственная система 200 может включать в себя любое количество различных аспектов, конфигураций, характеристик, особенностей и т.д. производственных систем 122, которые показаны и описаны со ссылкой на схематические изображения по ФИГ. 2-3, а также их вариантов, без необходимости включения всех таких аспектов, конфигураций, характеристик, особенностей и т.д. В целях краткости, не каждый вышеописанный компонент, деталь, участок, аспект, область и т.д. или их вариант может быть описан, показан и/или отмечен еще раз относительно производственной системы 200; однако, объемом настоящего изобретения предусматривается, что рассмотренные ранее признаки, варианты и т.д. могут быть использованы с производственной системой 200.
[00062] Производственная система 200 может включать в себя устройство 202 измерения глобального положения (которое может быть примером устройства 126 измерения глобального положения), робота 204 (который может быть примером робота 128), аппарат 206 (который может быть примером аппарата 124) и запас деталей 208 (который может быть примером запаса деталей 130). Один или более из следующих объектов: устройство 202 измерения глобального положения, робот 204, аппарат 206 и запас деталей 208 могут быть размещены на одном или более соответствующих автоматически управляемых транспортных средствах 194, каждое из которых может быть выполнено с возможностью перемещения устройства 202 измерения глобального положения, робота 204, аппарата 206 или запаса деталей 208, соответственно, относительно другого из устройства 202 измерения глобального положения, робота 204, аппарата 206 и запаса деталей 208. Устройство 202 измерения глобального положения может быть выполнено с возможностью отслеживания положений робота 204, аппарата 206 и запаса деталей 208 с использованием системы 210 глобального видеонаблюдения, которая может быть примером системы 138 видеонаблюдения. Робот 204 может включать в себя исполнительный орган 212 (который может быть примером исполнительного органа 154) и устройство 214 измерения локального положения (которое может быть примером устройства 160 измерения локального положения). Устройство 214 измерения локального положения может быть выполнено с возможностью отслеживания положения исполнительного органа 212 относительно аппарата 206 и/или деталей 216 (которые могут быть примером деталей 158), которые могут находиться в емкости 218 (которая может быть примером емкости 172) запаса деталей 208.
[00063] Система 200 может быть выполнена с возможностью осуществления производственного процесса, такого как операция перегрузки, при котором соответствующую деталь 216 извлекают из запаса деталей 208 (например, захватывают и вынимают) и затем перемещают по направлению к аппарату 206 и размещают на нем. На ФИГ. 8 показаны множество деталей 216, остающихся в емкости 218, а также множество размещенных деталей 220, которые уже были перемещены из запаса деталей 208 и размещены на аппарате 206. Устройство 202 измерения глобального положения и устройство 214 измерения локального положения на роботе 204 могут дополнять друг друга и передавать данные касательно положений других компонентов системы с целью осуществления выравнивания исполнительного органа 212 робота 204 с целью точного извлечения соответствующей детали 216 из емкости 218, перемещения указанной детали возле аппарата 206 и размещение указанной детали на аппарате 206 (например, присоединения детали 216 к аппарату 206 с образованием соответственно размещенной детали 220).
[00064] Каждый компонент 150 системы может быть выполнен с возможностью перемещения относительно других компонентов 150 системы посредством размещения на соответствующем автоматически управляемом транспортном средстве 194. В других примерах только некоторые из компонентов 150 системы могут быть выполнены с возможностью перемещения, а другие могут быть выполнены неподвижными. Компоненты 150 системы могут быть выполнены с возможностью перемещения во множестве различных направлений. Например, аппарат 206 может быть выполнен с возможностью перемещения по меньшей мере в двух различных направлениях относительно робота 204, устройства 202 измерения глобального положения и/или запаса деталей 208. В некоторых примерах аппарат 206 может быть выполнен с возможностью перемещения по меньшей мере в трех различных перпендикулярных направлениях относительно робота 204, устройства 202 измерения глобального положения и/или запаса деталей 208. В некоторых примерах аппарат 206 может быть выполнен с возможностью поворота относительно робота 204, устройства 202 измерения глобального положения и/или запаса деталей 208. Например, аппарат 206 может быть выполнен с возможностью перемещения вперед и назад в первом направлении вдоль оси X 222, вперед и назад во втором направлении вдоль оси Y 226 и/или с возможностью перемещения вертикально вдоль оси Z 228. Ось X 222, ось Y 226 и ось Z 228 могут быть перпендикулярными и ортогональными друг другу. Каждое из устройства 202 измерения глобального положения, робота 204 и/или запаса деталей 208 может аналогичным образом быть выполнено с возможностью перемещения на автоматически управляемом транспортном средстве 194 относительно других соответствующих компонентов 150 системы. Исполнительный орган 212 может иметь дополнительные степени свободы. Например, в некоторых примерах исполнительный орган 212 дополнительно может быть выполнен с возможностью поворота вокруг каждой из осей X, Y и Z. Любые или все компоненты 150 системы могут быть полностью автономными в отношении размещения, выравнивания и/или выполнения задания.
[00065] Каждое устройство 202 измерения глобального положения и устройство 214 измерения локального положения может быть выполнено с возможностью проведения измерений в режиме реального времени (например, данных касательно положения и/или ориентации одного или более компонентов 150 системы). Каждое устройство 202 измерения глобального положения и устройство 214 измерения локального положения может быть выполнено с возможностью приема и/или отправки непрерывной обратной связи на основе фактических положений одного или более компонентов 150 системы. Например, устройство 202 измерения глобального положения может включать в себя систему 210 видеонаблюдения, которая может включать в себя, например, одну или более камер, выполненных с возможностью определения физической геометрии и мест расположения робота 204, аппарата 206 и запаса деталей 208. Аналогичным образом, устройство 214 измерения локального положения может включать в себя систему 224 локального видеонаблюдения, которое может включать в себя одну или более камер, выполненных с возможностью определения физической геометрии и мест расположения аппарата 206, исполнительного органа 212 и запаса деталей 208. Дополнительно или альтернативно устройство 202 измерения глобального положения и/или устройство 214 измерения локального положения могут быть выполнены с возможностью отслеживания положений и/или ориентации других деталей, приспособлений, полок или стоек для смены, подузлов и/или какого-либо другого устройства или конструкции, используемых при выполнении данного задания или производственного процесса или связанных с ними.
[00066] В некоторых примерах устройство 202 измерения глобального положения и/или устройство 214 измерения локального положения могут включать в себя соответствующие предварительно запрограммированные пределы относительно диапазона положений и/или ориентации для одного или более компонентов 150 системы. Например, устройство 202 измерения глобального положения может включать в себя обрабатывающее устройство, имеющее сохраненные и заранее определенные общие пределы для положений робота 204, аппарата 206 и/или запаса деталей 208 таким образом, что устройство 202 измерения глобального положения выполнено с возможностью выдачи инструкций каждому соответствующему компоненту 150 системы находиться в соответствующих общих заранее определенных пределах для каждого компонента. Аналогичным образом, устройство 214 измерения локального положения может включать в себя обрабатывающее устройство, имеющее сохраненные заранее определенные локальные пределы для положения и/или ориентации исполнительного органа 212 таким образом, что исполнительный орган 212 не может быть перемещен за диапазон указанных заранее определенных локальных пределов. Такие заранее определенные общие и локальные пределы могут быть заданы по желанию, с тем чтобы предотвратить повреждение одного или более компонентов 150 системы (например, общий предел может быть задан, с тем чтобы предотвратить выдачу инструкций аппарату 206 для перемещения устройством 202 измерения глобального положения таким образом, что он может совершить столкновение со стеной или другой зафиксированной конструкцией в используемой производственной среде).
[00067] Устройство 214 измерения локального положения может принимать информацию от устройства 202 измерения глобального положения и может обновлять местоположение исполнительного органа 212 и продолжать задание или производственный процесс после пошагового изменения положения или повторного выравнивания исполнительного органа 212 относительно аппарата 206 и/или запаса деталей 208. Система 200 может быть выполнена с возможностью повторяющейся отправки и/или приема обратной связи и обновления положения исполнительного органа 212 на основе сигналов обратной связи и непрерывных обновлений. Таким образом, система 200 может включать в себя динамические компоненты 150 системы и динамическую непрерывную обратную связь с одним или более компонентами 150 системы или от них. Такие системы могут активировать проверку в режиме реального времени, когда детали размещаются или собираются, для проверки того, что указанная деталь размещается и/или собирается правильно. Такие системы 200 могут тем самым уменьшать или исключать доработку, по сравнению с обычными производственными способами и системами.
Иллюстративные, неисключительные примеры объекта изобретения в соответствии с настоящим раскрытием описаны в следующих перечисленных параграфах:
А1. Система для выполнения задания на аппарате, содержащая:
- указанный аппарат;
- запас деталей, расположенных отдельно от указанного аппарата;
- робота, имеющего исполнительный орган, при этом
исполнительный орган выполнен с возможностью выполнения задания на указанном аппарате с использованием одной или более указанных деталей,
робот содержит устройство измерения локального положения, выполненное с возможностью размещения исполнительного органа относительно указанного аппарата; и
- устройство измерения глобального положения, выполненное с возможностью отслеживания положений указанного аппарата, робота и запаса деталей.
А2. Система по параграфу А1, в которой указанный аппарат размещен на первом автоматически управляемом транспортном средстве, выполненном с возможностью перемещения указанного аппарата относительно одного или более из следующего: запас деталей, робот и устройство измерения глобального положения.
А2.1. Система по параграфу А2, в которой первое автоматически управляемое транспортное средство выполнено с возможностью поступательного перемещения указанного аппарата по меньшей мере в двух направлениях относительно одного или более из следующих объектов: запас деталей, робот и устройство измерения глобального положения.
А2.2. Система по параграфу А2 или А2.1, в которой первое автоматически управляемое транспортное средство выполнено с возможностью перемещения указанного аппарата по меньшей мере в трех различных перпендикулярных направлениях относительно одного или более из следующих объектов: запас деталей, робот и устройство измерения глобального положения.
А2.3. Система по любому из параграфов А2-А2.2, в которой первое автоматически управляемое транспортное средство выполнено с возможностью поворота указанного аппарата относительно одного или более из следующих объектов: запас деталей, робот и устройство измерения глобального положения.
A3. Система по любому из параграфов А1-А2.3, в которой устройство измерения глобального положения размещено на втором автоматически управляемом транспортном средстве, выполненном с возможностью перемещения устройства измерения глобального положения относительно одного или более из следующих объектов: указанный аппарат, робот и запас деталей.
А3.1. Система по параграфу A3, в которой второе автоматически управляемое транспортное средство выполнено с возможностью поступательного перемещения устройства измерения глобального положения по меньшей мере в двух направлениях относительно одного или более из следующих объектов: указанный аппарат, робот и запас деталей.
A3.2. Система по параграфу A3 или А3.1, в которой второе автоматически управляемое транспортное средство выполнено с возможностью перемещения устройства измерения глобального положения по меньшей мере в трех различных перпендикулярных направлениях относительно одного или более из следующих объектов: указанный аппарат, робот и запас деталей.
А3.3. Система по любому из параграфов А3-А3.2, в которой второе автоматически управляемое транспортное средство выполнено с возможностью поворота устройства измерения глобального положения относительно одного или более из следующих объектов: указанный аппарат, робот и запас деталей.
А4. Система по любому из параграфов А1-А3.3, в которой робот размещен на третьем автоматически управляемом транспортном средстве, выполненном с возможностью перемещения робота относительно одного или более из следующих объектов: указанный аппарат, запас деталей и устройство измерения глобального положения.
А4.1. Система по параграфу А4, в которой третье автоматически управляемое транспортное средство выполнено с возможностью поступательного перемещения робота по меньшей мере в двух направлениях относительно одного или более из следующих объектов: запас деталей, указанный аппарат и устройство измерения глобального положения.
А4.2. Система по параграфу А4 или А4.1, в которой третье автоматически управляемое транспортное средство выполнено с возможностью перемещения робота по меньшей мере в трех различных перпендикулярных направлениях относительно одного или более из следующих объектов: указанный аппарат, запас деталей и устройство измерения глобального положения.
А4.3. Система по любому из параграфов А4-А4.2, в которой третье автоматически управляемое транспортное средство выполнено с возможностью поворота робота относительно одного или более из следующего: запас деталей, указанный аппарат и устройство измерения глобального положения.
А5. Система по любому из параграфов А1-А4.3, в которой запас деталей размещен на четвертом автоматически управляемом транспортном средстве, выполненном с возможностью перемещения запаса деталей относительно одного или более из следующих объектов: указанный аппарат, робот и устройство измерения глобального положения.
А5.1. Система по параграфу А5, в которой четвертое автоматически управляемое транспортное средство выполнено с возможностью поступательного перемещения запаса деталей по меньшей мере в двух направлениях относительно одного или более из следующих объектов: устройство измерения глобального положения, робот и указанный аппарат.
А5.2. Система по параграфу А5 или А5.1, в которой четвертое автоматически управляемое транспортное средство выполнено с возможностью перемещения запаса деталей по меньшей мере в трех различных перпендикулярных направлениях относительно одного или более из следующих объектов: указанный аппарат, робот и устройство измерения глобального положения.
А5.3. Система по любому из параграфов А5-А5.2, в которой четвертое автоматически управляемое транспортное средство выполнено с возможностью поворота запаса деталей относительно одного или более из следующего: устройство измерения глобального положения, робот и указанный аппарат.
А6. Система по любому из параграфов А1-А5.3, в которой устройство измерения глобального положения содержит систему видеонаблюдения, выполненную с возможностью отслеживания указанного аппарата, робота и запаса деталей.
А7. Система по любому из параграфов А1-А6, в которой устройство измерения глобального положения содержит обрабатывающее устройство, выполненное с возможностью преобразования информации, полученной из отслеживания положений указанного аппарата, робота и/или запаса деталей в первые инструкции для перемещения указанного аппарата, вторые инструкции для перемещения робота и/или третьи инструкции для перемещения запаса деталей.
А8. Система по любому из параграфов А1-А7, в которой устройство измерения глобального положения содержит коммуникационное устройство, выполненное с возможностью связи с указанным аппаратом, роботом, запасом деталей, еще одним/указанным первым автоматически управляемым транспортным средством, на котором указанный аппарат размещен в заданном положении, еще одним/указанным вторым автоматически управляемым транспортным средством, на котором устройство измерения глобального положения размещено в заданном положении, еще одним/указанным третьим автоматически управляемым транспортным средством, на котором робот размещен и/или еще одним/указанным четвертым автоматически управляемым транспортным средством, на котором запас деталей размещен в заданном положении.
А9. Система по параграфам А7 и А8, в которой коммуникационное устройство выполнено с возможностью передачи в первое автоматически управляемое транспортное средство первых инструкций для перемещения указанного аппарата, выполнено с возможностью передачи в третье автоматически управляемое транспортное средство вторых инструкций для перемещения робота и/или выполнено с возможностью передачи в четвертое автоматически управляемое транспортное средство третьих инструкций для перемещения запаса деталей.
А10. Система по параграфу А8 или А9, в которой коммуникационное устройство выполнено с возможностью приема обратной связи относительно положений указанного аппарата, робота и/или запаса деталей.
A11. Система по любому из параграфов А1-А10, в которой указанный аппарат содержит компонент, систему, подсистему, деталь и/или конструкцию воздушного летательного аппарата.
А11.1. Система по параграфу A11, в которой указанный аппарат содержит один или более из следующих объектов: крыло и фюзеляж.
А12. Система по любому из параграфов А1-А11.1, в которой указанный аппарат содержит воздушный летательный аппарат.
А13. Система по любому из параграфов А1-А12, в которой указанный аппарат содержит пассажирский воздушный летательный аппарат.
А14. Система по любому из параграфов А1-А13, в которой робот содержит коммуникационное устройство локальной связи, выполненное с возможностью приема инструкций от устройства измерения глобального положения и обеспечения подачи сигналов обратной связи в устройство измерения глобального положения относительно положения робота.
А15. Система по любому из параграфов А1-А14, в которой робот содержит приспособление, присоединенное к исполнительному органу, при этом приспособление выполнено с возможностью выполнения задания на указанном аппарате и/или одной из деталей из указанного запаса деталей и при необходимости приспособление выполнено с возможностью выборочного извлечения из исполнительного органа.
А15.1. Система по параграфу А15, в которой устройство измерения локального положения присоединено к указанному приспособлению.
А16. Система по любому из параграфов А1-А15.1, в которой устройство измерения локального положения выполнено с возможностью дополнения устройства измерения глобального положения.
А17. Система по любому из параграфов А1-А16, в которой устройство измерения локального положения выполнено с возможностью размещения исполнительного органа с допуском 0,1 дюйма (2,5 мм).
А18. Система по любому из параграфов А1-А17, в которой устройство измерения локального положения выполнено с возможностью размещения исполнительного органа с допуском 0,01 дюйма (0,25 мм).
А19. Система по любому из параграфов А1-А18, в которой устройство измерения локального положения выполнено с возможностью размещения исполнительного органа с допуском 0,001 дюйма (0,025 мм).
А20. Система по любому из параграфов А1-А19, в которой устройство измерения локального положения ближе к исполнительному органу и при необходимости присоединено к нему.
А21. Система по любому из параграфов А1-А20, в которой устройство измерения локального положения выполнено с возможностью дополнения устройства измерения глобального положения с целью улучшения точности размещения исполнительного органа в заданном положении.
А21.1. Система по любому из параграфов А1-А21, в которой устройство измерения локального положения выполнено с возможностью выполнения размещения с более высоким разрешением, чем устройство измерения глобального положения.
А21.2. Система по параграфу А21.1, в которой устройство измерения локального положения выполнено с возможностью выполнения размещения с разрешением устройства измерения глобального положения, отличающимся по меньшей мере в десять раз.
А22. Система по любому из параграфов А1-А21.2, в которой устройство измерения локального положения включает в себя один или более из следующих объектов: камера, система видеонаблюдения и лазерное устройство.
А23. Система по любому из параграфов А1-А22, в которой исполнительный орган робота выполнен с возможностью перемещения по меньшей мере одной из деталей из запаса деталей к указанному аппарату.
А24. Система по любому из параграфов А1-А23, в которой исполнительный орган робота выполнен с возможностью присоединения по меньшей мере одной из деталей из запаса деталей на указанном аппарате.
А25. Система по любому из параграфов А1-А24, в которой исполнительный орган робота выполнен с возможностью выполнения одной или более из следующих операций: установка одной или более указанных деталей из запаса деталей на указанном аппарате, процесс сборки, системная интеграция, испытание, механическая обработка, процесс выкладки слоев, окрашивание, уплотнение, изготовление, контроль за обеспечением качества, подтверждение и проверка.
А26. Система по любому из параграфов А1-А25, в которой устройство измерения глобального положения выполнено с возможностью использования одного или более из следующего: система неподвижных опорных меток, система активных опорных меток на основе светодиодов и оптические данные для отслеживания положений робота, указанного аппарата и запаса деталей.
А27. Система по любому из параграфов А1-А26, в которой робот выполнен с возможностью повторяющегося перемещения множества соответствующих деталей по одной за один раз, из запаса деталей к указанному аппарату.
А28. Система по параграфу А27, в которой еще одно/указанное третье автоматически управляемое транспортное средство выполнено с возможностью перемещения робота между перемещением последующих соответствующих деталей из запаса деталей.
А29. Система по параграфу А27 или А28, в которой еще одно/указанное устройство измерения локального положения робота выполнено с возможностью регулирования положения исполнительного органа между перемещением последующих соответствующих деталей из запаса деталей.
А30. Система по любому из параграфов А1-А29, в которой робот выполнен с возможностью выполнения множества различных заданий на указанном аппарате и/или деталях из указанного запаса деталей.
А31. Система по любому из параграфов А1-А30, в которой исполнительный орган робота выполнен с возможностью присоединения к любому приспособлению из множества различных приспособлений, каждое из которых выполнено с возможностью выполнения отличающегося соответствующего задания.
В1. Система для осуществления производственного процесса, содержащая:
деталь;
робота, выполненного с возможностью перемещения указанной детали и/или выполнения задания на указанной детали с использованием исполнительного органа, присоединенного к роботу, при этом робот содержит устройство измерения локального положения, выполненное с возможностью отслеживания и размещения исполнительного органа в заданном положении;
множество станций, включающее по меньшей мере первую станцию и вторую станцию, причем каждая из указанного множества станций выполнена с возможностью выполнения отличающегося задания на указанной детали; и
устройство измерения глобального положения, выполненное с возможностью отслеживания положений указанной детали, робота и каждой из указанного множества станций, при этом робот выполнен с возможностью перемещения указанной детали по очереди к каждой из указанного множества станций с целью завершения указанного производственного процесса.
B2. Система по параграфу В1, в которой каждая из указанного множества станций содержит соответствующего робота задания, выполненного с возможностью выполнения отличающегося задания на указанной детали.
B3. Система по любому из параграфов В1-В2, в которой один или более из следующих объектов: указанная деталь, робот и устройство измерения глобального положения - размещено на соответствующем автоматически управляемом транспортном средстве, причем каждое автоматически управляемое транспортное средство выполнено с возможностью перемещения указанной детали, робота или устройства измерения глобального положения, соответственно, относительно других элементов из указанной детали, робота и устройства измерения глобального положения.
B4. Система по любому из параграфов В1-В3, в которой устройство измерения глобального положения содержит один или более из следующих объектов: система видеонаблюдения, выполненная с возможностью предоставления информации относительно положений робота, указанной детали и указанного множества станций; обрабатывающее устройство, выполненное с возможностью обработки информации от системы видеонаблюдения; и коммуникационное устройство, выполненное с возможностью отправки и/или приема данных роботу и/или от робота.
B5. Система по любому из параграфов В1-В4, в которой указанная деталь содержит один или более из следующих объектов: система, подсистема, компонент и/или конструкция воздушного летательного аппарата.
B6. Система по любому из параграфов В1-В5, в которой робот содержит устройство измерения локального положения, выполненное с возможностью отслеживания и размещения исполнительного органа робота в заданном положении.
B7. Система по параграфу В6, в которой указанное устройство измерения локального положения выполнено с возможностью обеспечения размещения с более высоким разрешением, чем устройство измерения глобального положения.
B8. Система по параграфу В6 или В7, в которой указанное устройство измерения локального положения присоединено к приспособлению, которое присоединено к исполнительному органу и выполнено с возможностью выполнения задания на указанной детали.
B9. Система по любому из параграфов В6-В8, в которой указанное устройство измерения локального положения содержит один или более из следующих объектов: система видеонаблюдения, камера и лазерное устройство.
В10. Система по любому из параграфов В6-В9, в которой указанное устройство измерения локального положения выполнено с возможностью обеспечения подачи сигналов обратной связи в обрабатывающее устройство робота касательно местоположения исполнительного органа, причем обрабатывающее устройство робота выполнено с возможностью осуществления перемещения исполнительного органа в качестве реакции на сигналы обратной связи.
В11. Система по любому из параграфов В6-В10, в которой указанное устройство измерения локального положения выполнено с возможностью размещения исполнительного органа с допуском 0,1 дюйма (2,5 мм).
B12. Система по любому из параграфов В6-В11, в которой указанное устройство измерения локального положения выполнено с возможностью размещения исполнительного органа с допуском 0,01 дюйма (0,25 мм).
B13. Система по любому из параграфов В6-В12, в которой указанное устройство измерения локального положения выполнено с возможностью размещения исполнительного органа с допуском 0,001 дюйма (0,025 мм).
B14. Система по любому из параграфов В1-В13, в которой робот содержит коммуникационное устройство локальной связи, выполненное с возможностью приема информации от устройства измерения глобального положения относительно положений указанной детали и одной или более из указанного множества станций.
B15. Система по любому из параграфов В1-В14, в которой исполнительный орган робота выполнен с возможностью выполнения одной или более из следующих операций: установка готовой детали в результате выполнения указанного производственного процесса на аппарате, процесс сборки, системная интеграция, испытание, механическая обработка, процесс выкладки слоев, окрашивание, уплотнение, изготовление, контроль за обеспечением качества, подтверждение и проверка.
B16. Система по любому из параграфов В1-В15, в которой устройство измерения глобального положения выполнено с возможностью использования одного или более из следующего: система неподвижных опорных меток, система активных опорных меток на основе светодиодов и оптические данные для отслеживания положений робота, указанной детали и указанного множества станций.
B17. Система по любому из параграфов В1-В16, в которой указанное устройство измерения локального положения выполнено с возможностью использования одного или более из следующего: система неподвижных опорных меток, система активных опорных меток на основе светодиодов и оптические данные для отслеживания положений робота, указанной детали, указанного множества станций, исполнительного органа и/или устройства измерения глобального положения.
С1. Применение системы по любому из параграфов А1-А31 для осуществления производственного процесса.
D1. Применение системы по любому из параграфов В1-В17 для осуществления производственного процесса.
Е1. Воздушный летательный аппарат, изготовленный с применением системы по любому из параграфов А1-А31 или В1-В17.
F1. Способ осуществления производственного процесса с использованием системы, включающий:
- конфигурирование устройства измерения глобального положения системы для выполнения общего выравнивания аппарата, робота и запаса деталей с использованием устройства измерения глобального положения, причем
устройство измерения глобального положения выполнено с возможностью отслеживания положений указанного аппарата, робота и запаса деталей, при этом устройство измерения глобального положения дополнительно выполнено с возможностью выдавать инструкции и вызывать перемещение указанного аппарата, робота и/или запаса деталей относительно устройства измерения глобального положения;
- конфигурирование устройства измерения локального положения системы для выполнения локального выравнивания исполнительного органа робота относительно указанного аппарата с использованием устройства измерения локального положения, причем устройство измерения локального положения присоединено к роботу; и
- активирование выполнения задания на указанном аппарате или в отношении него таким образом, что при выполнении задания используются исполнительный орган робота и деталь из запаса деталей.
F2. Способ по параграфу F1, в котором активирование выполнения задания на указанном аппарате или в отношении него включает активирование робота для автономного выполнения задания.
F3. Способ по любому из параграфов F1-F2, дополнительно включающий размещение указанного аппарата на первом автоматически управляемом транспортном средстве, первое автоматически управляемое транспортное средство выполнено с возможностью перемещения указанного аппарата относительно робота, запаса деталей и/или устройства измерения глобального положения.
F3.1. Способ по параграфу F3, в котором конфигурирование устройства измерения глобального положения для выполнения общего выравнивания включает конфигурирование устройства измерения глобального положения для выдачи инструкций на перемещение первого автоматически управляемого транспортного средства с указанным аппаратом, размещенным на нем в заданном положении.
F4. Способ по любому из параграфов F1-F3.1, дополнительно включающий размещение устройства измерения глобального положения на втором автоматически управляемом транспортном средстве, причем второе автоматически управляемое транспортное средство выполнено с возможностью перемещения устройства измерения глобального положения относительно указанного аппарата, запаса деталей и/или робота.
F4.1. Способ по параграфу F4, в котором конфигурирование устройства измерения глобального положения для выполнения общего выравнивания включает конфигурирование устройства измерения глобального положения для выдачи инструкций на перемещение второго автоматически управляемого транспортного средства устройством измерения глобального положения, размещенным на нем в заданном положении.
F5. Способ по любому из параграфов F1-F4.1, дополнительно включающий размещение робота на третьем автоматически управляемом транспортном средстве, причем третье автоматически управляемое транспортное средство выполнено с возможностью перемещения робота относительно указанного аппарата, запаса деталей и/или устройства измерения глобального положения.
F5.1. Способ по параграфу F5, в котором конфигурирование устройства измерения глобального положения для выполнения общего выравнивания включает конфигурирование устройства измерения глобального положения для выдачи инструкций на перемещение третьего автоматически управляемого транспортного средства с помощью робота, размещенного на нем в заданном положении.
F6. Способ по любому из параграфов F1-F5.1, дополнительно включающий размещение запаса деталей на четвертом автоматически управляемом транспортном средстве, причем четвертое автоматически управляемое транспортное средство выполнено с возможностью перемещения запаса деталей относительно указанного аппарата, робота и/или устройства измерения глобального положения.
F6.1. Способ по параграфу F6, в котором конфигурирование устройства измерения глобального положения для выполнения общего выравнивания включает конфигурирование устройства измерения глобального положения для выдачи инструкций на перемещение четвертого автоматически управляемого транспортного средства с запасом деталей, размещенным на нем в заданном положении.
F7. Способ по любому из параграфов F1-F6.1, дополнительно включающий
конфигурирование робота и/или еще одного/указанного третьего автоматически управляемого транспортного средства, на котором робот размещен для обеспечения подачи сигналов обратной связи в устройство измерения глобального положения, и
конфигурирование устройства измерения глобального положения для приема сигналов обратной связи от робота и/или третьего автоматически управляемого транспортного средства.
F8. Способ по любому из параграфов F1-F7, дополнительно включающий
конфигурирование запаса деталей и/или еще одного/указанного четвертого автоматически управляемого транспортного средства, на котором запас деталей размещен для обеспечения подачи сигналов обратной связи в устройство измерения глобального положения, и
конфигурирование устройства измерения глобального положения для приема сигналов обратной связи от запаса деталей и/или четвертого автоматически управляемого транспортного средства.
F9. Способ по любому из параграфов F1-F8, дополнительно включающий
конфигурирование указанного аппарата и/или еще одного/указанного первого автоматически управляемого транспортного средства, на котором указанный аппарат размещен для обеспечения подачи сигналов обратной связи в устройство измерения глобального положения, и
конфигурирование устройства измерения глобального положения для приема сигналов обратной связи от указанного аппарата и/или первого автоматически управляемого транспортного средства.
F10. Способ по любому из параграфов F1-F9, в котором конфигурирование устройства измерения локального положения для выполнения локального выравнивания включает конфигурирование устройства измерения локального положения для выдачи инструкций и вызова поступательного перемещения исполнительного органа.
F11. Способ по любому из параграфов F1-F10, в котором конфигурирование устройства измерения локального положения для выполнения локального выравнивания включает конфигурирование устройства измерения локального положения для выдачи инструкций и вызова поворота исполнительного органа.
F12. Способ по любому из параграфов F1-F11, в котором конфигурирование устройства измерения глобального положения включает конфигурирование устройства измерения глобального положения для автономного регулирования положений устройства измерения глобального положения, робота, запаса деталей и/или указанного аппарата, с целью активирования выравнивания исполнительного органа с целью адекватного выполнения задания.
F13. Способ по любому из параграфов F1-F12, в котором конфигурирование устройства измерения глобального положения включает конфигурирование устройства измерения глобального положения для отслеживания указанного аппарата.
F14. Способ по любому из параграфов F1-F13, в котором конфигурирование устройства измерения глобального положения включает конфигурирование устройства измерения глобального положения для сведения вместе множества изображений указанного аппарата с целью определения положения указанного аппарата.
F15. Способ по любому из параграфов F1-F14, в котором конфигурирование устройства измерения глобального положения включает конфигурирование устройства измерения глобального положения для преобразования принятых данных в трехмерные координаты.
F16. Способ по параграфу F15, дополнительно включающий конфигурирование устройства измерения глобального положения для отправки трехмерных координат роботу.
F17. Способ по параграфу F16, дополнительно включающий конфигурирование робота с возможностью регулирования и/или повторного выравнивания исполнительного органа на основе трехмерных координат.
F18. Способ по любому из параграфов F1-F17, в котором активирование выполнения задания включает активирование выполнения одной или более из следующих операций: перемещение детали, перемещение указанного аппарата, перемещение робота, перемещение исполнительного органа, извлечение соответствующей детали из запаса деталей и перемещение ее к указанному аппарату, соединение соответствующей детали из запаса деталей с указанным аппаратом, установку компонента на указанный аппарат, сборку двух или более соответствующих деталей из запаса деталей, интеграция систем, испытание, механическая обработка, выкладку слоев композиционного материала, окрашивание, уплотнение, изготовление, контроль за обеспечением качества, проверку правильности размещения и подтверждение того, что задание было выполнено правильно.
F19. Способ по любому из параграфов F1-F18, в котором указанной системой является система по любому из параграфов А1-А31.
F20. Способ по любому из параграфов F1-F19, в котором указанной системой является система по любому из параграфов В1-В17.
G1. Способ осуществления производственного процесса, включающий:
- размещение детали на первой станции с использованием первого робота, при этом
первый робот использует информацию о положении указанной детали от устройства измерения глобального положения и первого устройства измерения локального положения,
устройство измерения глобального положения размещено на расстоянии от первого робота и выполнено с возможностью отслеживания положений первого робота, указанной детали и первой станции, и
первое устройство измерения локального положения присоединено к первому роботу и выполнено с возможностью отслеживания положения первого исполнительного органа, присоединенного к первому роботу, при этом
устройство измерения глобального положения и первое устройство измерения локального положения выполнены с возможностью выравнивания указанной детали и первого исполнительного органа относительно друг друга;
- выполнение первого задания на указанной детали на первой станции с использованием второго исполнительного органа второго робота, при этом
второй робот использует информацию о положении указанной детали от устройства измерения глобального положения и второго устройства измерения локального положения,
устройство измерения глобального положения размещено на расстоянии от второго робота и дополнительно выполнено с возможностью отслеживания положения второго робота, и
второе устройство измерения локального положения присоединено ко второму роботу и выполнено с возможностью отслеживания положения второго исполнительного органа, присоединенного ко второму роботу, при этом
устройство измерения глобального положения и второе устройство измерения локального положения выполнены с возможностью выравнивания указанной детали и второго исполнительного органа относительно друг друга;
- перемещение указанной детали к второй станции с использованием первого робота и
- выполнение второго задания на указанной детали на второй станции с использованием третьего исполнительного органа третьего робота, при этом
третий робот использует информацию о положении указанной детали от устройства измерения глобального положения и третьего устройства измерения локального положения,
устройство измерения глобального положения размещено на расстоянии от третьего робота и дополнительно выполнено с возможностью отслеживания заданного положения третьего робота, и
третье устройство измерения локального положения присоединено к третьему роботу и выполнено с возможностью отслеживания заданного положения третьего исполнительного органа, присоединенного к третьему роботу, причем
устройство измерения глобального положения и третье устройство измерения локального положения выполнены с возможностью выравнивания указанной детали и третьего исполнительного органа относительно друг друга.
G1.1. Способ по параграфу G1, в котором выполнение первого задания осуществляют после размещения указанной детали на первой станции, при этом
перемещение указанной детали ко второй станции осуществляют после выполнения первого задания, а
выполнение второго задания осуществляют после перемещения указанной детали ко второй станции.
G1.2. Способ по параграфу G1 или G1.1, дополнительно включающий извлечение указанной детали из второй станции после выполнения второго задания.
G1.3. Способ по любому из параграфов G1-G1.2, дополнительно включающий
размещение указанной детали на множестве дополнительных станций,
выполнение соответствующего дополнительного задания на каждой соответствующей дополнительной станции и
перемещение указанной детали к отличающейся соответствующей станции из указанного множества дополнительных станций после выполнения каждого соответствующего дополнительного задания.
G2. Способ по любому из параграфов G1-G1.3, дополнительно включающий перемещение указанной детали к третьей станции и выполнение третьего задания на указанной детали на третьей станции.
G3. Способ по любому из параграфов G1-G2, в котором указанная деталь является первой деталью, при этом способ дополнительно включает
размещение второй детали на первой станции,
выполнение первого задания на второй детали на первой станции,
перемещение второй детали ко второй станции и
выполнение второго задания на второй детали на второй станции.
G4. Способ по параграфу G3, в котором размещение второй детали на первой станции осуществляют после выполнения первого задания на первой детали и после перемещения первой детали ко второй станции.
G5. Способ по параграфу G3 или G4, дополнительно включающий повторное перемещение первой детали от второй станции, при этом
перемещение второй детали ко второй станции осуществляют после выполнения первого задания на второй детали на первой станции, после выполнения второго задания на первой детали на второй станции и после повторного перемещения первой детали от второй станции.
G6. Способ по любому из параграфов G1-G5, в котором одну или более из следующих операций: размещение указанной детали на первой станции, выполнение первого задания на указанной детали на первой станции, перемещение указанной детали ко второй станции и выполнение второго задания на указанной детали на второй станции осуществляют с использованием системы по любому из параграфов А1-А31.
G7. Способ по любому из параграфов G1-G6, в котором одну или более из следующих операций: размещение указанной детали на первой станции, выполнение первого задания на указанной детали на первой станции, перемещение указанной детали ко второй станции и выполнение второго задания на указанной детали на второй станции осуществляют с использованием системы по любому из параграфов В1-В17.
G8. Способ по любому из параграфов G1-G7, в котором выполнение первого задания включает одну или более из следующих операций: установка компонента на указанной детали, сборка, системная интеграция, испытание, механическая обработка, выкладка слоев, окрашивание, уплотнение, изготовление, контроль за обеспечением качества, проверка и подтверждение размещения в заданном положении.
G9. Способ по любому из параграфов G1-G8, в котором выполнение второго задания включает одну или более из следующих операций: установка компонента на указанной детали, сборка, системная интеграция, испытание, механическая обработка, выкладка слоев, окрашивание, уплотнение, изготовление, контроль за обеспечением качества, проверка и подтверждение размещения в заданном положении.
G10. Способ по любому из параграфов G1-G9, в котором указанная деталь является первой деталью, при этом способ дополнительно включает в себя его повторение на множестве деталей.
H1. Способ осуществления производственного процесса, включающий:
- прием информации о грубом выравнивании от устройства измерения глобального положения, при этом устройство измерения глобального положения выполнено с возможностью отслеживания относительного положения каждого из следующих объектов: аппарат, робот и запас деталей;
- выполнение общего выравнивания указанного аппарата, робота и запаса деталей;
- прием информации о локальном выравнивании от устройства измерения локального положения, присоединенного к роботу; и
- выполнение точного выравнивания исполнительного органа, присоединенного к роботу, причем исполнительный орган выполнен с возможностью выполнения первого задания на указанном аппарате.
Н2. Способ по параграфу H1, в котором исполнительный орган является первым исполнительным органом, при этом способ дополнительно включает извлечение первого исполнительного органа от робота и присоединение второго исполнительного органа к роботу, при этом второй исполнительный орган выполнен с возможностью выполнения второго задания на указанном аппарате, причем второе задание отличается от первого задания.
Н3. Способ по любому из параграфов H1-Н2, в котором выполнение общего выравнивания включает выполнение общего выравнивания с первым разрешением, а
выполнение точного выравнивания включает выполнение точного выравнивания со вторым разрешением, причем второе разрешение больше, чем первое разрешение.
Н4. Способ по параграфу Н3, в котором второе разрешение по меньшей мере в десять раз больше, чем первое разрешение.
Н5. Способ по любому из параграфов Н1-Н4, в котором выполнение общего выравнивания указанного аппарата, робота и запаса деталей включает грубое размещение указанного аппарата, робота и/или запаса деталей, соответственно, относительно других из указанного аппарата, робота и запаса деталей.
Н6. Способ по любому из параграфов Н1-Н5, в котором выполнение общего выравнивания указанного аппарата, робота и запаса деталей включает грубое размещение указанного аппарата, робота и/или запаса деталей в соответствующем абсолютном положении.
I1. Воздушный летательный аппарат, изготовленный с использованием способа по любому из параграфов F1-F20, G1-G10 и/или Н1-Н7.
При использовании в настоящем документе термины "приспособленный" и "выполненный с возможностью" означают, что элемент, компонент или другой предмет разработан и/или предназначен для выполнения данной функции. Таким образом, при использовании в настоящем документе термины "приспособленный" и "выполненный с возможностью" не должны толковаться означающими, что данный элемент, компонент или другой предмет просто "способен" выполнять определенную функцию, а что указанный элемент, компонент и/или другой предмет специально выбран, создан, реализован, использован, запрограммирован и/или разработан с целью выполнения этой функции. Также без отхода от объема настоящего изобретения элементы, компоненты и/или другие упомянутые объекты, упомянутые как приспособленные для выполнения конкретной функции, могут дополнительно или в качестве альтернативы быть раскрыты как выполненные с возможностью выполнения этой функции и наоборот. Аналогичным образом, объект, упомянутый как выполненный с возможностью выполнения определенной функции, может дополнительно или в качестве альтернативы быть раскрыт как способный функционировать для выполнения этой функции.
Различные раскрытые элементы аппаратов и системы и операции способов, раскрытые в настоящем документе, не обязательно необходимы для всех аппаратов, систем и способов согласно настоящему раскрытию, причем настоящее раскрытие включает в себя все новые и неочевидные комбинации и подкомбинации различных раскрытых в настоящем документе элементов и операций. Более того, один или более из раскрытых в настоящем документе различных элементов и операций могут определять независимый объект, обладающий признаками изобретения, выделяемый и существующий отдельно от рассматриваемого в целом аппарата, системы или способа. В соответствии с этим такой патентоспособный объект изобретения не обязан быть связанным с конкретными аппаратами, системами, и способами, явно раскрытыми в настоящем документе, и такой патентоспособный объект изобретения может найти применение в аппаратах, системах и/или способах, которые не раскрыты явно в настоящем документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ПО АВТОМАТИЗАЦИИ СКЛАДСКОЙ ЛОГИСТИКИ ПРЕДПРИЯТИЙ | 2023 |
|
RU2822722C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ОБЪЕКТОВ ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ, НАПРИМЕР, ДЛЯ СБОРКИ ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2651504C2 |
| ПРОФИЛИРОВАННЫЙ ЗАПОЛНИТЕЛЬ, СОДЕРЖАЩИЙ МАТРИЦУ ИЗ ПРЕРЫВИСТЫХ ВОЛОКОН | 2016 |
|
RU2716794C2 |
| УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЯ, ПРЕЖДЕ ВСЕГО ОКРАШИВАНИЯ, НА ПРЕДМЕТЫ, ПРЕЖДЕ ВСЕГО АВТОМОБИЛЬНЫЕ КУЗОВА | 2012 |
|
RU2597399C2 |
| ПРОИЗВОДСТВО В СРЕДАХ С МИКРОГРАВИТАЦИЕЙ И ИЗМЕНЯЮЩИМИСЯ ВНЕШНИМИ СИЛАМИ | 2014 |
|
RU2611533C1 |
| РЕЖИМ ОЖИДАНИЯ ЧЕЛОВЕКОПОДОБНОГО РОБОТА | 2015 |
|
RU2663657C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ В СИСТЕМАХ ВОЗДУШНОГО ДВИЖЕНИЯ | 2018 |
|
RU2762151C2 |
| СИСТЕМА И СПОСОБ ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ, СИСТЕМА ОБСЛУЖИВАНИЯ ПАССАЖИРОВ И ВОЗДУШНОЕ СУДНО | 2017 |
|
RU2745578C2 |
| СИСТЕМА И СПОСОБ, ОБЕСПЕЧИВАЮЩИЕ РАСПРЕДЕЛЕННУЮ АРХИТЕКТУРУ СВАРКИ | 2002 |
|
RU2284885C2 |
| СИСТЕМЫ, УСТРОЙСТВА И СПОСОБЫ ПОДАВЛЕНИЯ ВОСПЛАМЕНЕНИЯ | 2016 |
|
RU2700670C2 |
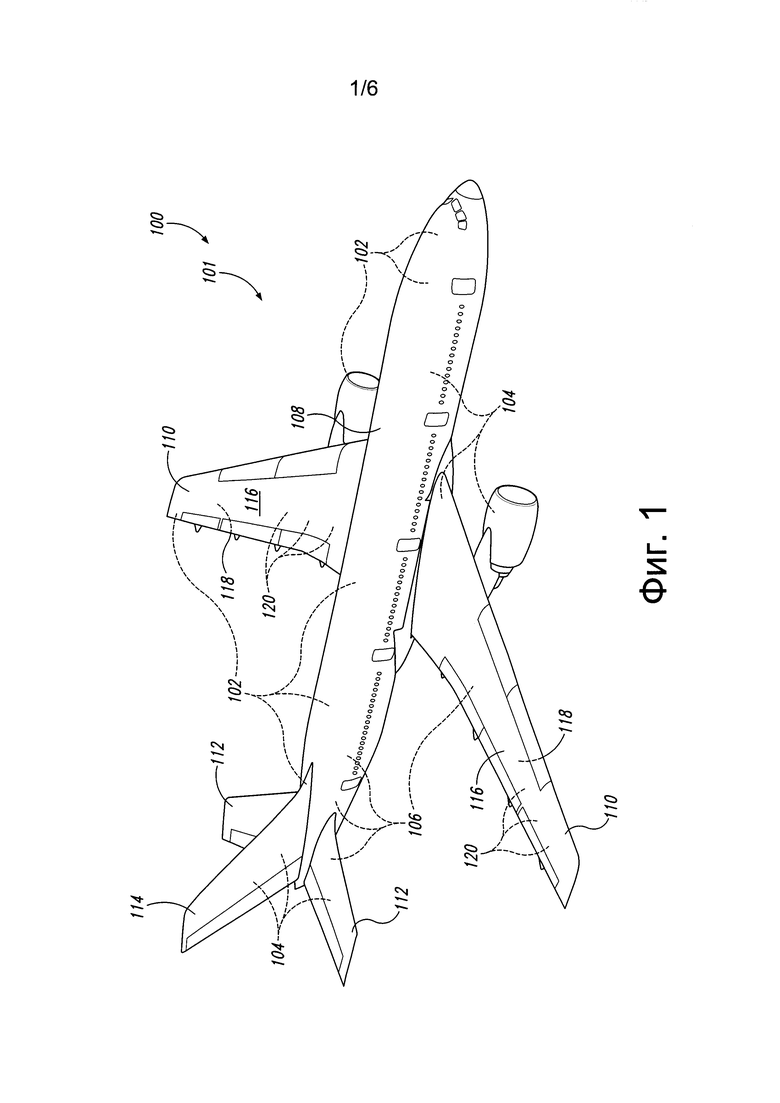
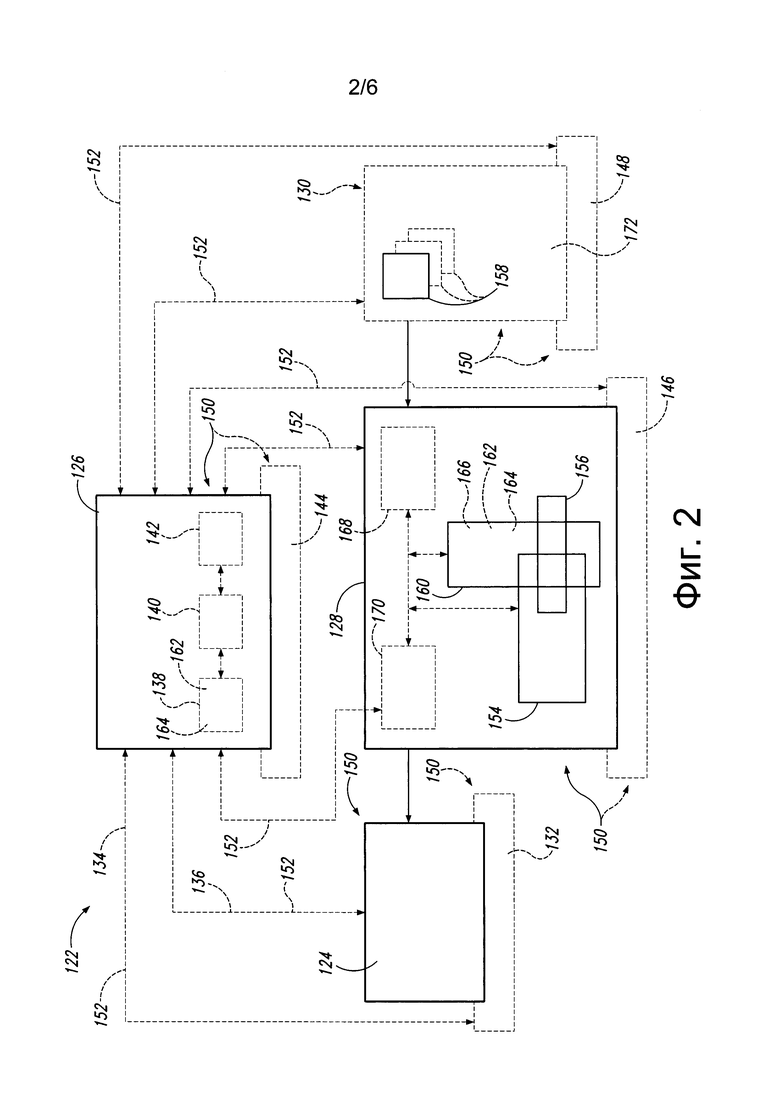
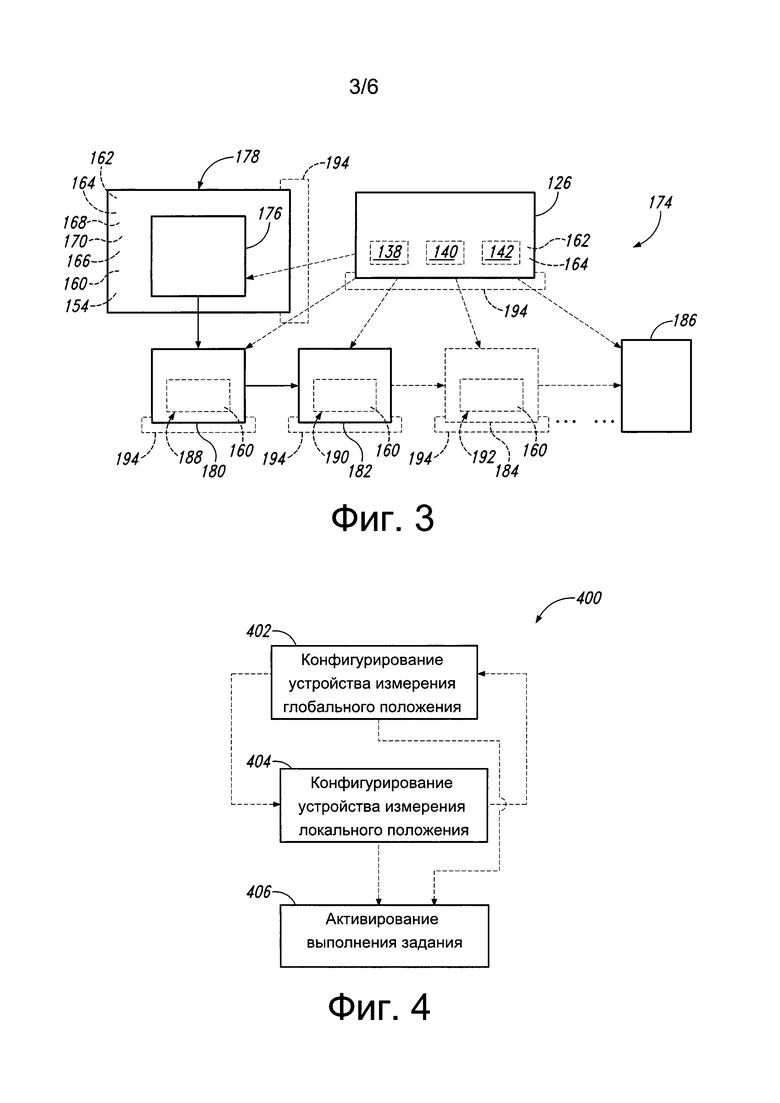
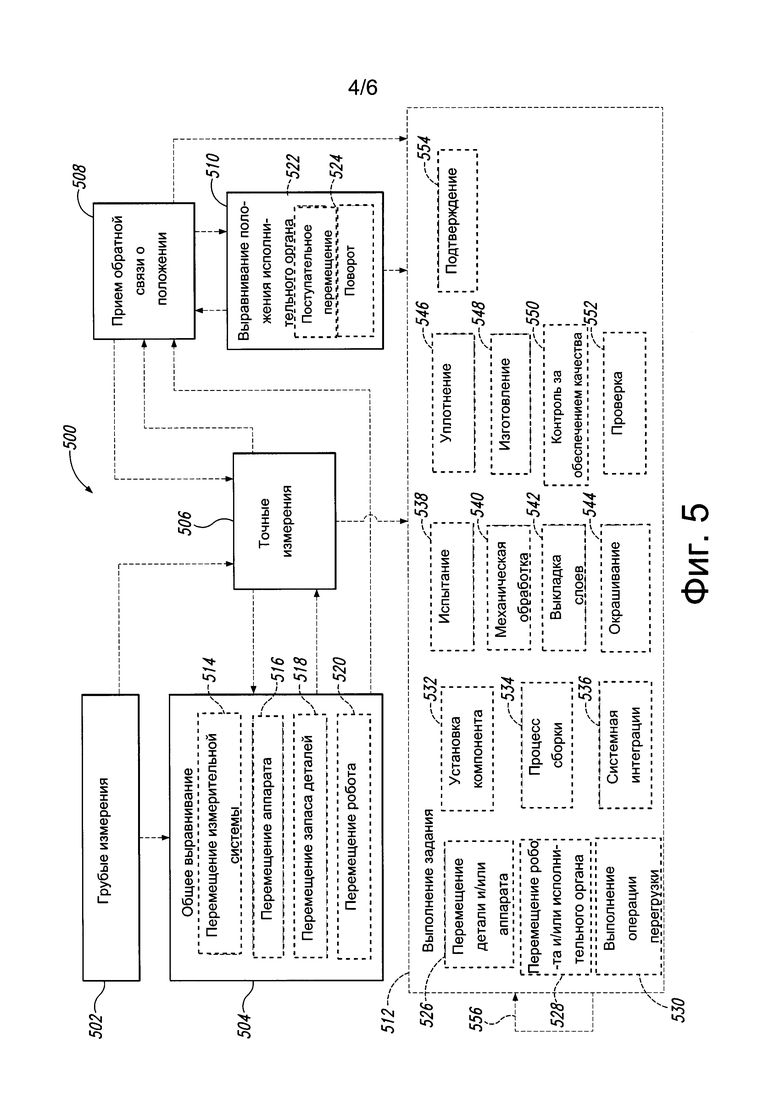
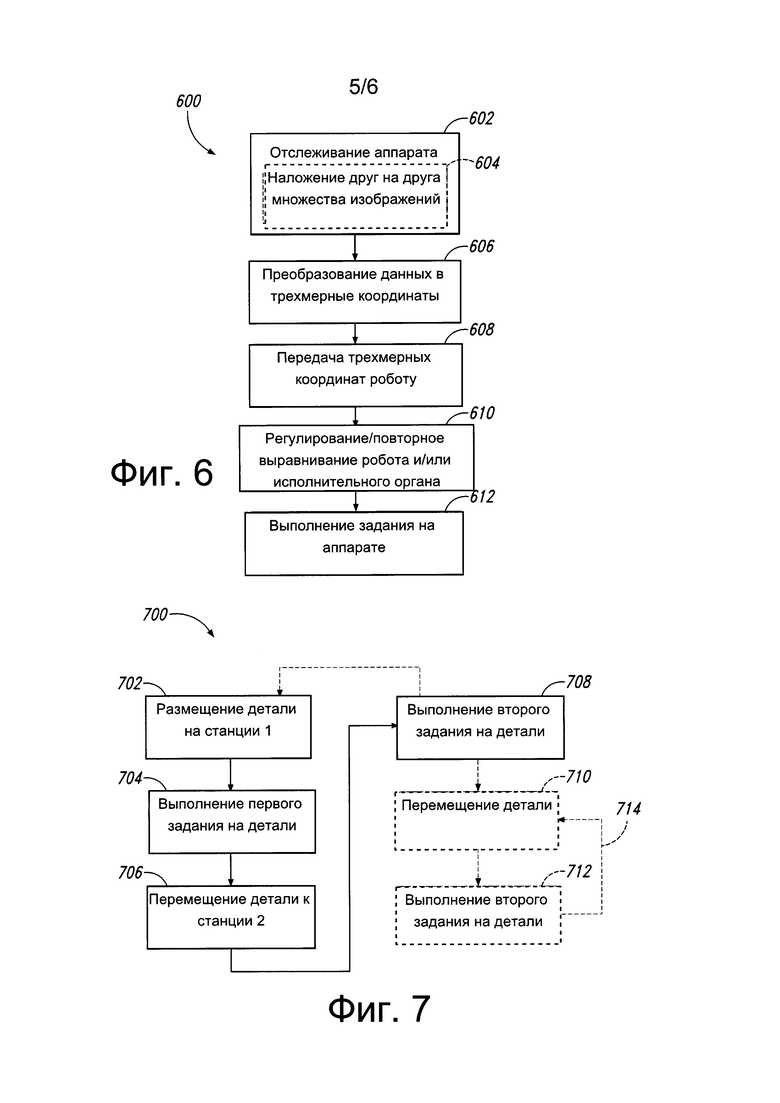
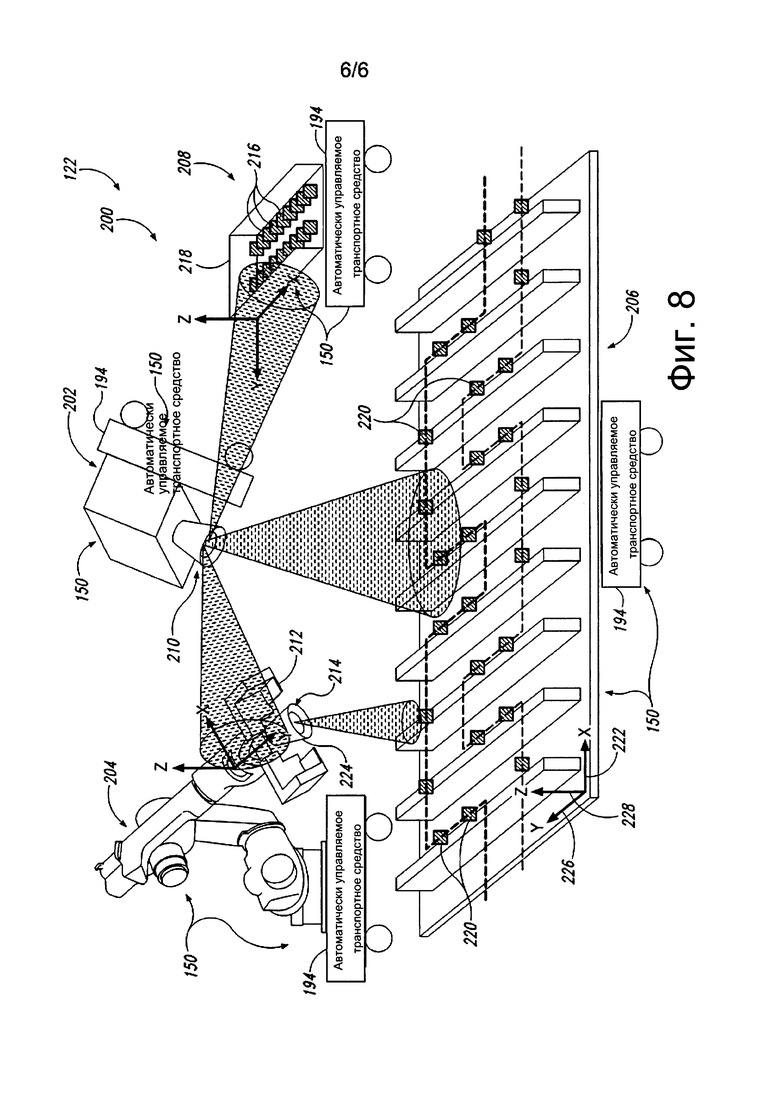
Автоматизированные динамические производственные системы обеспечивают возможность выравнивания относительно друг друга множества компонентов, таких как аппарат, робот и запас деталей. Выравнивание сначала может быть выполнено грубо, с использованием устройства измерения глобального положения, выполненного с возможностью отслеживания указанного аппарата, робота и запаса деталей, каждый из которых может быть выполнен с возможностью перемещения относительно других элементов этой группы, например, посредством размещения на соответствующем автоматически управляемом транспортном средстве. Выравнивание затем может быть выполнено с меньшими допусками с использованием устройства измерения локального положения, присоединенного к роботу и выполненного с возможностью точного размещения исполнительного органа таким образом, что исполнительный орган может выполнять производственное задание на указанном аппарате, например процесс перегрузки, включающий транспортировку отдельной детали из запаса деталей, передачу ее к указанному аппарату и присоединение ее к нему. Такие системы и способы могут быть использованы для осуществления производственных процессов на крупном аппарате, таком как воздушный летательный аппарат. 3 н. и 18 з.п. ф-лы, 8 ил.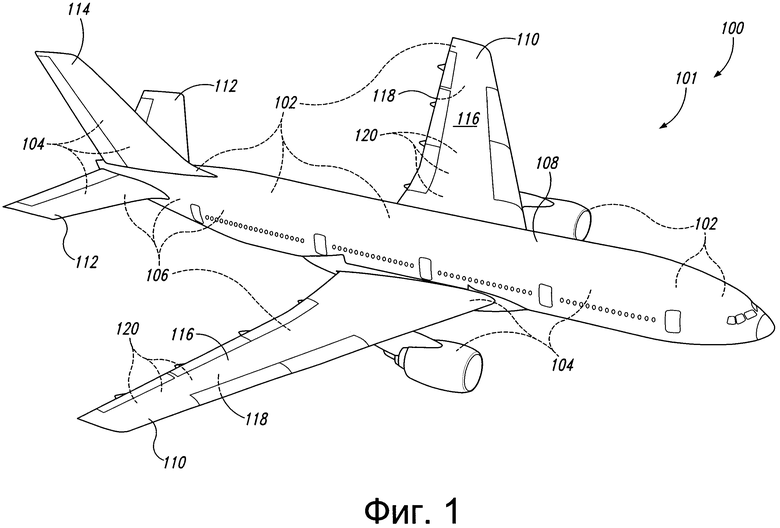
1. Система 122 для выполнения задания на аппарате 124, содержащая:
- указанный аппарат 124;
- запас деталей 130, содержащий множество деталей, расположенных отдельно от указанного аппарата 124;
- робот 128, имеющий исполнительный орган 154, при этом
исполнительный орган 154 выполнен с возможностью выполнения задания на указанном аппарате 124 с использованием одной или более из указанного множества деталей,
робот 128 содержит устройство 160 измерения локального положения, выполненное с возможностью размещения исполнительного органа 154 относительно указанного аппарата 124 с использованием системы 166 локального видеонаблюдения таким образом, что исполнительный орган 154 достаточно выровнен с указанным аппаратом 124 для выполнения задания; и
- устройство 126 измерения глобального положения, выполненное с возможностью отслеживания положений указанного аппарата 124, робота 128 и запаса деталей 130 с использованием системы 138 глобального видеонаблюдения, при этом
устройство 126 измерения глобального положения выполнено с возможностью передачи данных роботу 128 о положениях указанного аппарата 124 и запаса деталей 130, и при этом
устройство 126 измерения глобального положения выполнено с возможностью приема обратной связи 152 касательно фактических положений робота 128, указанного аппарата 124 и запаса деталей 130, и при этом
устройство 160 измерения локального положения выполнено с возможностью дополнения устройства 126 измерения глобального положения при размещении исполнительного органа 154 в заданном положении.
2. Система 122 по п. 1, также содержащая первое автоматически управляемое транспортное средство 132, на котором указанный аппарат 124 размещен в заданном положении, причем
первое автоматически управляемое транспортное средство 132 выполнено с возможностью перемещения указанного аппарата 124 относительно запаса деталей 130, робота 128 и устройства 126 измерения глобального положения.
3. Система 122 по любому из пп. 1, 2, в которой устройство 126 измерения глобального положения размещено на втором автоматически управляемом транспортном средстве 144, выполненном с возможностью перемещения устройства 126 измерения глобального положения относительно одного или более из следующих объектов: указанный аппарат 124, робот 128 и запас деталей 130.
4. Система 122 по любому из пп. 1, 2, в которой робот 128 размещен на третьем автоматически управляемом транспортном средстве 146, выполненном с возможностью перемещения робота 128 относительно одного или более из следующих объектов: указанный аппарат 124, запас деталей 130 и устройство 126 измерения глобального положения.
5. Система 122 по любому из пп. 1, 2, в которой запас деталей 130 размещен на четвертом автоматически управляемом транспортном средстве 148, выполненном с возможностью перемещения запаса деталей 130 относительно одного или более из следующих объектов: указанный аппарат 124, робот 128 и устройство 126 измерения глобального положения.
6. Система 122 по любому из пп. 1, 2, в которой устройство 126 измерения глобального положения содержит обрабатывающее устройство 140, выполненное с возможностью преобразования информации, полученной из отслеживания положений указанного аппарата 124, робота 128 и запаса деталей 130, в первые инструкции для перемещения указанного аппарата 124, вторые инструкции для перемещения робота 128 и третьи инструкции для перемещения запаса деталей 130, и в которой
устройство 126 измерения глобального положения содержит коммуникационное устройство 142, выполненное с возможностью передачи первых инструкций, вторых инструкций и третьих инструкций с осуществлением в результате этого перемещения и общего выравнивания указанного аппарата 124, робота 128 и запаса деталей 130.
7. Система 122 по любому из пп. 1, 2, в которой указанный аппарат 124 содержит один или более из следующих объектов: компонент, система 104, подсистема 106, деталь 102 и конструкция воздушного летательного аппарата 101.
8. Система 122 по любому из пп. 1, 2, в которой исполнительный орган 154 робота 128 выполнен с возможностью перемещения по меньшей мере одной из указанного множества деталей 130 из запаса деталей 130 в заданное положение возле указанного аппарата 124, причем
исполнительный орган 154 робота 128 выполнен с возможностью присоединения указанной по меньшей мере одной из указанного множества деталей из запаса деталей 130 на указанном аппарате 124.
9. Система 122 по любому из пп. 1, 2, в которой исполнительный орган 154 робота 128 выполнен с возможностью выполнения одной или более из следующих операций: установка одной или более из указанного множества деталей 130 из запаса деталей 130 на указанном аппарате 124, сборка, системная интеграция, испытание, механическая обработка, процесс выкладки слоев, окрашивание, уплотнение, изготовление, контроль за обеспечением качества, подтверждение и проверка.
10. Система 122 по любому из пп. 1, 2, также содержащая множество станций 180/182/184, включающее по меньшей мере первую станцию 180 и вторую станцию 182, при этом каждая из указанного множества станций выполнена с возможностью выполнения отличающегося задания на указанном аппарате 124, причем
устройство 126 измерения глобального положения также выполнено с возможностью отслеживания положений каждой из указанного множества станций 180/182/184, а
робот 128 выполнен с возможностью перемещения указанного аппарата 124 по очереди к каждой из указанного множества станций 180/182/184 с целью выполнения задания.
11. Система 122 по любому из пп. 1, 2, в которой каждая из указанного множества станций 180/182/184 содержит соответствующего робота 128 задания, выполненного с возможностью выполнения отличающегося задания на указанном аппарате 124.
12. Система 122 по любому из пп. 1, 2, в которой устройство 126 измерения глобального положения выполнено с возможностью вызова грубого выравнивания робота 128, запаса деталей 130 и указанного аппарата 124, и в которой устройство 160 измерения локального положения выполнено с возможностью вызова точного выравнивания исполнительного органа 154 робота 128 относительно указанного аппарата 124, причем точное выравнивание имеет более высокое разрешение, чем грубое выравнивание.
13. Способ осуществления производственного процесса с использованием системы 122 по п. 1, включающий:
- конфигурирование устройства 126 измерения глобального положения системы 122 для выполнения общего выравнивания аппарата 124, робота 128 и запаса деталей 130 с использованием устройства 126 измерения глобального положения, при этом
устройство 126 измерения глобального положения выполнено с возможностью отслеживания положений указанного аппарата 124, робота 128 и запаса деталей 130, и
устройство 126 измерения глобального положения также выполнено с возможностью выдавать инструкции и вызывать перемещение указанного аппарата 124, робота 128 и/или запаса деталей 130 относительно устройства 126 измерения глобального положения;
- конфигурирование устройства 160 измерения локального положения системы 122 для выполнения локального выравнивания исполнительного органа 154 робота 128 относительно указанного аппарата 124 с использованием устройства 160 измерения локального положения, при этом устройство 160 измерения локального положения присоединено к роботу 128; и
- активирование выполнения задания на указанном аппарате 124 таким образом, что при выполнении задания используются исполнительный орган 154 робота 128 и деталь из запаса деталей 130.
14. Способ по п. 13, в котором каждую из следующих операций: прием информации о грубом выравнивании, выполнение общего выравнивания, прием информации о локальном выравнивании и выполнение точного выравнивания - осуществляют автономно, при этом способ также включает
размещение указанного аппарата 124 на первом автоматически управляемом транспортном средстве 132, выполненном с возможностью перемещения указанного аппарата 124 относительно устройства 126 измерения глобального положения, и
размещение запаса деталей 130 на четвертом автоматически управляемом транспортном средстве 148, выполненном с возможностью перемещения запаса деталей относительно устройства 126 измерения глобального положения.
15. Способ осуществления производственного процесса, включающий:
- прием информации о грубом выравнивании от устройства 126 измерения глобального положения, при этом устройство 126 измерения глобального положения выполнено с возможностью отслеживания относительного положения каждого из следующих объектов: аппарат 124, робот 128 и запас деталей 130;
- выполнение общего выравнивания указанного аппарата 124, робота 128 и запаса деталей 130, на основе информации о грубом выравнивании;
- прием информации о локальном выравнивании от устройства 160 измерения локального положения, присоединенного к роботу 128; и
- выполнение точного выравнивания исполнительного органа 154, присоединенного к роботу 128, на основе информации о локальном выравнивании, причем исполнительный орган 154 выполнен с возможностью выполнения первого задания на указанном аппарате 124.
16. Способ по п. 15, в котором выполнение общего выравнивания включает выполнение общего выравнивания с первым разрешением, а
выполнение точного выравнивания включает выполнение точного выравнивания со вторым разрешением, причем второе разрешение больше, чем первое разрешение.
17. Способ по любому из пп. 15, 16, в котором выполнение общего выравнивания указанного аппарата 124, робота 128 и запаса деталей 130 включает грубое размещение указанного аппарата 124, робота 128 и запаса деталей 130, соответственно, относительно других элементов из указанного аппарата 124, робота 128 и запаса деталей 130.
18. Способ по любому из пп. 15, 16, в котором выполнение общего выравнивания указанного аппарата 124, робота 128 и запаса деталей 130 включает грубое размещение указанного аппарата 124, робота 128 и запаса деталей 130 в соответствующем абсолютном положении.
19. Способ по любому из пп. 15, 16, также включающий обновление выравнивания исполнительного органа 154 в качестве реакции на сигналы обратной связи, принимаемые в режиме реального времени устройством 126 измерения глобального положения.
20. Способ по любому из пп. 15, 16, также включающий осуществление указанного производственного процесса на указанном аппарате 124 с использованием исполнительного органа 154.
21. Способ по п. 15, в котором каждую из следующих операций: прием информации о грубом выравнивании, выполнение общего выравнивания, прием информации о локальном выравнивании и выполнение точного выравнивания - осуществляют автономно, при этом способ также включает:
размещение указанного аппарата 124 на первом автоматически управляемом транспортном средстве 132, выполненном с возможностью перемещения указанного аппарата 124 относительно устройства 126 измерения глобального положения, и
размещение запаса деталей 130 на четвертом автоматически управляемом транспортном средстве 148, выполненном с возможностью перемещения запаса деталей относительно устройства 126 измерения глобального положения.
| US 5345675 A, 13.09.1994 | |||
| US 2014375794 A1, 25.12 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 5380978 A, 10.01.1995 | |||
| US 2003063292 A1, 03.04.2003. | |||

