Изобретение относится к области приборостроения и может быть использовано при установке инерциальной навигационной системы и других бортовых приборов на объектах различного назначения с целью обеспечения точности управления движением объекта и работы его систем.
В современных движущихся объектах, в которых используются инерциальные навигационные системы, для повышения точности управления их движением проводят согласование продольных осей инерциальной навигационной системы и объекта.
Согласование продольных осей инерциальной навигационной системы и объекта выполняется путем согласования продольной оси монтажной рамы для инерциальной навигационной системы, установленной на объекте, и продольной оси объекта. После закрепления согласованной монтажной рамы на нее устанавливают и переустанавливают инерциальную навигационную систему, не выполняя больше согласования осей при ее переустановках. Согласование выполняют оптическим способом с использованием теодолитов и рабочего отражателя, привязанного к продольной оси монтажной рамы. При этом температурные и другие эксплуатационные воздействия изменяют положение рабочего отражателя, относительно продольной оси монтажной рамы, что обуславливает погрешность согласования продольных осей инерциальной навигационной системы и объекта.
Известные способы согласования продольных осей объекта и инерциальной навигационной системы не позволяют контролировать непосредственно в эксплуатационных условиях точность привязки рабочего отражателя к продольной оси монтажной рамы.
За прототип взят способ согласования продольных осей бортового прибора и объекта (см. патент RU 2282824, по кл. G01C 21/00, от 27 августа 2006 г.).
В этом способе на бортовой прибор устанавливают отражатель, предварительно измеряют угол невыставки входящей нормали отражателя относительно продольной оси прибора, выставляют оптическую ось первого теодолита по базовому направлению, совпадающему с направлением продольной оси объекта, выставляют оптическую ось второго теодолита по направлению, совпадающему с входящей нормалью отражателя прибора, определяют угол рассогласования между этими направлениями и поворачивают корпус прибора в сторону уменьшения угла рассогласования до требуемой величины.
В известном способе имеется недостаток, связанный с тем, что при измерении угла невыставки рабочего отражателя необходима физическая реализация двух направлений. Первым направлением является направление входящей нормали к поверхности рабочего отражателя. Вторым направлением является направление входящей нормали к привалочной поверхности бортового прибора. Угол между этими направлениями характеризует погрешность привязки рабочего отражателя. Однако в известном способе не определяется второе направление. В связи с этим определить в реальных условиях эксплуатации невыставку рабочего отражателя в известном способе не представляется возможным, что снижает точность согласования продольных осей бортового прибора и объекта.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является повышение точности согласования продольных осей бортового прибора и объекта за счет определения в реальных условиях эксплуатации поправочного коэффициента на погрешность привязки рабочего отражателя.
Технический результат достигается тем, что в известном способе согласования продольных осей бортового прибора и объекта, включающем установку на основании приборного отсека объекта монтажной рамы для инерциальной навигационной системы, предварительное измерение угла невыставки входящей нормали рабочего отражателя относительно продольной оси монтажной рамы, определение теодолитным методом направления продольной оси монтажной рамы с учетом невыставки рабочего отражателя и направления продольной оси объекта, нахождения угла рассогласования между продольными осями монтажной рамы и объекта, поворот монтажной рамы в сторону уменьшения угла рассогласования до требуемой величины дополнительно в операции определения направления продольной оси монтажной рамы закрепляют рабочий отражатель на устройстве, имитирующем установочные места корпуса инерциальной навигационной системы, и в операции предварительного измерения угла невыставки рабочего отражателя перед размещением устройства на монтажной раме его помещают на теодолитный штатив, устанавливают калибровочный отражатель на привалочной плоскости устройства в первое положение, при котором метка «X» на торце кронштейна калибровочного отражателя направлена в сторону метки «X» устройства, устанавливают первый автоколлимационный теодолит в точку А напротив калибровочного отражателя, второй автоколлимационный теодолит устанавливают в точку С напротив устройства, согласовывают визирную ось первого теодолита с входящей нормалью калибровочного отражателя и берут с первого теодолита отсчет O12, снимают кронштейн с калибровочным отражателем с устройства, разворачивают его вокруг оси OпZп на 180° и устанавливают на устройство во второе положение, согласуют визирную ось первого теодолита с входящей нормалью калибровочного отражателя и берут отсчет O13, согласуют визирную ось первого теодолита с визирной осью второго теодолита и снимают с первого теодолита отсчет O16, а со второго теодолита отсчет O26 перемещают первый теодолит из точки А в точку В напротив рабочего отражателя устройства, согласуют визирную ось первого теодолита с входящей нормалью рабочего отражателя устройства и берут отсчет O14, согласуют визирные оси первого и второго теодолитов и берут с первого теодолита отсчет O15, а со второго теодолита отсчет O25, а затем определяют поправочный коэффициент на неперпендикулярность входящей нормали рабочего отражателя устройства к его привалочной плоскости по формуле
δ=-δоп,
где δоп=O20-O25; O20=O25+α54-90°;
α54=O14-O15; O2п=O26-α16+90°;
α16=O16-O11; O11=O12+0,5α23; α23=O13-O12.
При анализе способа согласования продольных осей монтажной рамы для инерциальной системы и объекта используют схему расположения теодолитов при определении поправочного коэффициента на неперпендикулярность входящей нормали отражателя устройства к его привалочной плоскости, показанную на фигуре.
Установим устройство с рабочим отражателем на теодолитном штативе.
Закрепим кронштейн с калибровочным отражателем на привалочной плоскости устройства в первое положение, при котором метка «X» на торце кронштейна направлена в сторону метки «X» устройства. Выставим устройство в горизонт с помощью подъемных винтов подставки, расположенной на теодолитном штативе. Установим первый теодолит в точку А напротив калибровочного отражателя на расстоянии (2±0,5) м. Второй теодолит установим в точку С напротив устройства на расстоянии порядка (2±0,5) м. Согласуем визирную ось первого теодолита с входящей нормалью калибровочного отражателя 4, находящегося в первом положении и возьмем с него отсчет O12. Для исключения погрешности определения направления H1, характеризующего направление входящей нормали к привалочной плоскости устройства, связанной с инструментальной ошибкой установки калибровочного отражателя на кронштейне относительно его привалочной плоскости, снимем кронштейн с калибровочным отражателем, развернем его вокруг оси OпZп на 180° и вновь установим на устройство во второе положение. Визирную ось первого теодолита согласуем с входящей нормалью калибровочного отражателя во втором положении и возьмем отсчет O13. Согласуем по направлению Н6 визирную ось первого теодолита с визирной осью второго теодолита и снимем в согласованном положении с первого теодолита отсчет O16. В согласованном положении двух теодолитов снимем отсчет со второго теодолита O26. Первый теодолит переместим из точки А в точку В, установим его на расстоянии (2±0,5) м напротив рабочего отражателя 2 устройства.
Согласуем визирную ось первого теодолита с входящей нормалью рабочего отражателя 2 устройства и в этом согласованном положении возьмем отсчет O14.
Согласуем визирные оси второго теодолита и первого теодолита, находящегося в точке В. В согласованном положении с первого теодолита снимем отсчет O15, а со второго теодолита снимем отсчет O25.
Используя полученные измерения, выполним следующие расчеты.
Определим угол между направлениями Н2 и Н3:
α23=O13-O12.
Определим для первого теодолита отсчет O11 по направлению H1, перпендикулярному привалочной плоскости устройства:
O11=O12+0,5α23.
Определим угол между направлениями H1 и -Н6:
α16=O16-O11.
Определим для второго теодолита отсчет O2П по направлению НП, задаваемому привалочной плоскостью устройства:
O2п=O26-α16+90°.
Определим угол между направлениями -Н5 и -Н4:
α54=O14-O15.
Определим для второго теодолита отсчет O20 по направлению HO, задаваемому рабочим отражателем устройства:
O20=O25+α54-90°.
Определим неперпендикулярность входящей нормали отражателя устройства к его привалочной плоскости:
δоп=O20-O2п.
Определим поправочный коэффициент на неперпендикулярность входящей нормали отражателя устройства к его привалочной плоскости:
δo=-δоп1.
Таким образом, предлагаемый способ согласования продольных осей монтажной рамы для инерциальной навигационной системы и объекта имеет следующие отличия от известного способа:
- в операции определения направления продольной оси монтажной рамы (инерциальной навигационной системы) вводится новое действие, связанное с установкой рабочего отражателя на специальное устройство, являющееся физической моделью основания корпуса инерциальной навигационной системы с ее установочными местами, что позволяет выполнять предварительную калибровку рабочего зеркала в эксплуатационных условиях;
- в предварительной операции, связанной с определением угла невыставки входящей нормали рабочего отражателя относительно привалочной плоскости устройства или инерциальной навигационной системы, вводятся новые действия, связанные с установкой рабочего отражателя, расположенного на устройстве, на теодолитный штатив, закрепления сперва в первом положении, затем во втором положении на привалочной плоскости устройства дополнительного калибровочного отражателя, с установкой первого теодолита напротив калибровочного отражателя и наводкой его по направлениям входящих нормалей калибровочного отражателя в первом и втором положениях, снятии отсчетов в этих положениях, затем перестановкой первого теодолита в положение напротив рабочего отражателя, наводкой его зрительной трубы по направлению входящей нормали рабочего отражателя и снятия отсчета, что позволило на основе полученных отсчетов определить поправочный коэффициент на неперпендикулярность входящей нормали рабочего отражателя к привалочной плоскости устройства (корпусу инерциальной навигационной системы);
- определение поправочного коэффициента на неперпендикулярность входящей нормали рабочего отражателя устройства к его привалочной плоскости проводится по полученным новым аналитическим зависимостям, в которых используются значения отсчетов, снятых с теодолитов, расположенных по новой схеме.
На фигуре показана схема расположения теодолитов при определении поправочного коэффициента на неперпендикулярность входящей нормали рабочего отражателя устройства к его привалочной плоскости.
На устройстве 1 расположен рабочий отражатель 2. На привалочной плоскости устройства закреплен кронштейн 3 с калибровочным отражателем 4. Первый теодолит вначале установлен в точке А напротив калибровочного отражателя, затем перемещен в точку В напротив рабочего отражателя 2. Второй теодолит 6 расположен в точке С напротив устройства 1.
Устройство 1 предназначено для физического моделирования расположения систем координат (СК), связанных монтажной рамой (OpXpУpZp) и корпусом инерциальной навигационной системы (OкXкУкZк), относительно СК (OсXсУсZс), связанной с объектом.
В СК OсXсУсZс ее начало помещено в точку Oс, в которой находится центр масс объекта, оси OсXс и OсУс расположены в вертикальной плоскости симметрии объекта, при этом ось OсXс направлена вдоль продольной строительной оси корпуса объекта, а ось OсУс - по перпендикуляру к оси OсXс, лежащему в вертикальной плоскости симметрии объекта; ось OcZc - перпендикулярна плоскости симметрии объекта, направлена к правому борту и образует правую СК.
В СК OpXpУpZp начало помещено в точку Op, являющуюся точкой пересечения оси, проходящей через центры фиксаторов монтажной рамы с вертикальной плоскостью ее симметрии; ось OpXp находится в привалочной плоскости монтажной рамы и проходит через центры фиксаторов и направлена к правой боковой стороне монтажной рамы; ось OpУp перпендикулярна оси OpXp и направлена в сторону верхней части монтажной рамы; ось OpZp перпендикулярна привалочной плоскости монтажной рамы и направлена к ее фронтальной стороне, образуя правую СК.
В СК OкXкУкZк начало расположено в точке Oк, являющейся точкой пересечения оси, проходящей через центры отверстий для фиксаторов монтажной рамы, с вертикальной плоскостью симметрии инерциальной навигационной системы, ось OкXк находится в привалочной плоскости инерциальной навигационной системы, проходит через центры отверстий для фиксаторов и направлена к правой боковой стороне корпуса инерциальной навигационной системы; ось OкУк перпендикулярна оси OкXк и направлена к верхней части корпуса, ось OкZк перпендикулярна привалочной плоскости инерциальной навигационной системы и направлена к ее фронтальной стороне, образуя правую СК.
СК Oу XуУуZу связана с устройством. Начало СК расположено в точке Oу, являющейся точкой пересечения оси, проходящей через центры отверстий для фиксаторов монтажной рамы на привалочной плоскости, с вертикальной плоскостью симметрии устройства, ось OкXк находится в привалочной плоскости, проходит через центры отверстий для фиксаторов монтажной рамы, направлена в сторону метки «X» на устройстве; ось OуУу расположена в привалочной плоскости перпендикулярно оси OуXу и направлена в сторону метки «У» устройства; ось OуZу перпендикулярна плоскости симметрии устройства и направлена в сторону метки «Z» устройства и образует правую СК.
СК OоXоУоZо связана с рабочим отражателем устройства. Начало СК помещено в точку Oо, являющуюся центром круговой поверхности рабочего отражателя; оси OоXо, OоУо находятся в плоскости отражательной поверхности, ось OоХо параллельна нижней установочной поверхности устройства и направлена в сторону метки «X», ось OоУо перпендикулярна оси OоХо и направлена в сторону вершины стенки, на которой установлен рабочий отражатель, ось OоZо параллельна входящей нормали отражателя и образует правую СК.
СК OпXпУпZп связана с кронштейном, на котором установлен калибровочный отражатель. Начало СК помещено в точку Оп, являющуюся точкой пересечения оси симметрии с привалочной плоскостью; оси OпXп, OпУп расположены в привалочной плоскости кронштейна, ось OпXп проходит через центральные оси фиксаторов и направлена в сторону метки «X» на краю кронштейна; ось OпУп перпендикулярна оси OпXп и направлена вверх при установке кронштейна на устройство его меткой «X» по направлению метки «X» устройства; ось OпZп направлена по оси симметрии кронштейна и образует правую СК.
СК O3X3У3Z3 связана с калибровочным отражателем. Начало СК помещено в точку O3, находящуюся в центре симметрии отражательной поверхности; оси O3X3, O3У3 находятся в плоскости отражательной поверхности, ось O3X3 проходит через центральные оси фиксаторов кронштейна в направлении метки «X», ось O3У3 расположена перпендикулярно оси O3X3 и направлена вверх при установке кронштейна на устройстве его меткой «X» по направлению метки «X» устройства; ось O3Z3 направлена по оси симметрии и образует правую СК.
Определение углового расположения СК OкXкУкZк и OpXpУpZp относительно СК OсXсУсZс производится по результатам измерений углового расположения СК OуXуУуZу относительно СК OсXсУсZс, получаемого при установке на монтажную раму устройства вместо инерциальной навигационной системы.
Привалочная плоскость устройства физически реализует направление его продольной оси OуXу, проходящей через центры отверстий для фиксаторов.
Рабочим отражателем 4 является плоское оптическое зеркало, помещенное в оправу. Плоскость рабочего отражателя параллельна привалочной плоскости устройства с погрешностью его установки, которая учитывается поправочным коэффициентом δ, характеризующим угол неперпендикулярности входящей нормали рабочего отражателя к его привалочной плоскости.
Направление исходящей нормали к плоскости рабочего отражателя устройства с учетом поправочного коэффициента δ является направлением поперечной оси OуZу устройства, которое определяют с помощью теодолита. Определяя угол между направлением OуZу(OуXу) и направлением продольной оси OсXс объекта, находят угол рассогласования между продольными осями монтажной рамы (инерциальной навигационной системой) и объекта.
В соответствии со схемой, представленной на фигуре, был изготовлен образец устройства для определения рассогласования между продольными осями объекта и монтажной рамой для инерциальной навигационной системы.
При изготовлении устройства использовался современный уровень технологии механического производства гироскопической техники.
Согласно предлагаемому способу был определен поправочный коэффициент на угол неперпендикулярности входящей нормали рабочего отражателя к его привалочной плоскости после температурных и других эксплуатационных воздействий.
Данные измерений и расчетов приведены в таблице.
Как видно из таблицы, предлагаемый способ позволяет определять поправочный коэффициент на неперпендикулярной входной нормали к плоскости рабочего отражателя относительно привалочной плоскости устройства (монтажной рамы) в реальных условиях эксплуатации.
Результаты испытаний показывают, что этот поправочный коэффициент изменяется в реальных условиях эксплуатации и для повышения точности согласования его необходимо определять при каждой операции согласования продольных осей монтажной рамы для инерциальной навигационной системы и объекта.
Использование предлагаемого способа позволяет повысить точность согласования продольных осей инерциальной навигационной системы и объекта путем учета погрешности привязки рабочего отражателя относительно продольной оси монтажной рамы, возникающей как при изготовлении, так и в результате эксплуатационных воздействий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОГЛАСОВАНИЯ ПРОДОЛЬНЫХ ОСЕЙ БОРТОВОГО ПРИБОРА И ОБЪЕКТА | 2005 |
|
RU2282824C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| Способ юстировки и контроля плоских фацетных гелиостатов | 1990 |
|
SU1747811A1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
| ОПТИЧЕСКИЙ ТЕОДОЛИТ | 1992 |
|
RU2053483C1 |
| Способ взаимного ориентирования визирного луча и базисной рейки | 1985 |
|
SU1425448A1 |
| МАРКШЕЙДЕРСКИЙ ГИРОКОМПАС | 2010 |
|
RU2445574C1 |
| СПОСОБ СОГЛАСОВАНИЯ ОСЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ С ОСЬЮ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА И ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436043C1 |
| ОПТИЧЕСКИЙ ТЕОДОЛИТ | 1991 |
|
RU2036421C1 |
Изобретение относится к области приборостроения и может быть использовано при установке инерциальной навигационной системы и других бортовых приборов на объектах различного назначения с целью обеспечения точности управления движением объекта и работы его систем. Техническим результатом является повышение точности согласования продольных осей бортового прибора и объекта. При согласовании продольных осей монтажной рамы для инерциальной навигационной системы и объекта в операции определения направления продольной оси монтажной рамы закрепляют рабочий отражатель на устройстве, имитирующем установочные места корпуса инерциальной навигационной системы, и в операции предварительного измерения угла невыставки рабочего отражателя устройство помещают на теодолитный штатив, устанавливают на привалочной плоскости устройства калибровочный отражатель на кронштейне в два положения, находят с помощью двух теодолитов направления входящих нормалей к привалочной плоскости устройства и к рабочему отражателю и на основе снятых с теодолитов отсчетов с помощью аналитического выражения определяют поправочный коэффициент на угол невыставки рабочего отражателя. 1 ил., 1 табл.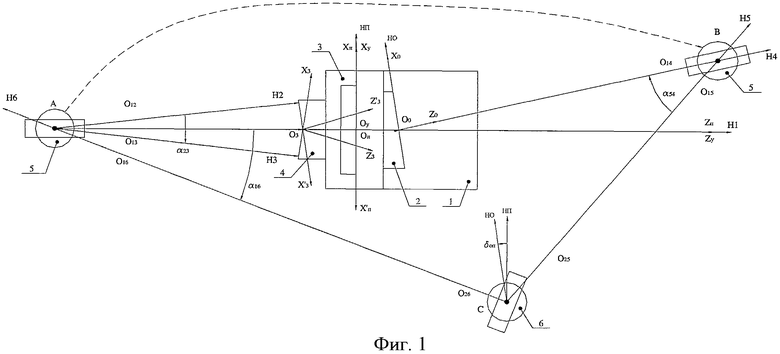
Способ согласования продольных осей монтажной рамы для инерциальной навигационной системы и объекта, включающий установку на основании приборного отсека объекта монтажной рамы для инерциальной навигационной системы, предварительное измерение угла невыставки входящей нормали рабочего отражателя относительно продольной оси монтажной рамы, определение теодолитным методом направления продольной оси монтажной рамы с учетом невыставки рабочего отражателя и направления продольной оси объекта, нахождение угла рассогласования между продольными осями монтажной рамы и объекта, поворот монтажной рамы в сторону уменьшения угла рассогласования до требуемой величины, отличающийся тем, что в операции определения направления продольных осей монтажной рамы закрепляют рабочий отражатель на устройстве, имитирующем установочные места корпуса инерциальной навигационной системы, и в операции предварительного измерения угла невыставки рабочего отражателя перед размещением устройства на монтажной раме его помещают на теодолитный штатив, устанавливают калибровочный отражатель на привалочной плоскости устройства в первое положение, при котором метка «X» на торце кронштейна калибровочного отражателя направлена в сторону метки «X» устройства, устанавливают первый автоколлимационный теодолит в точку А напротив калибровочного отражателя, второй автоколлимационный теодолит устанавливают в точку С напротив устройства, согласовывают визирную ось первого теодолита с входящей нормалью калибровочного отражателя и берут с первого теодолита отсчет O12, снимают кронштейн с калибровочным отражателем с устройства, разворачивают его вокруг оси OпZп на 180° и устанавливают на устройство во второе положение, согласуют визирную ось первого теодолита с входящей нормалью калибровочного отражателя и берут отсчет O13, согласуют визирную ось первого теодолита с визирной осью второго теодолита и снимают с первого теодолита отсчет O16, а со второго теодолита отсчет O26, перемещают первый теодолит из точки А в точку В напротив рабочего отражателя устройства, согласуют визирную ось первого теодолита с входящей нормалью рабочего отражателя устройства и берут отсчет O14, согласуют визирные оси первого и второго теодолитов и берут с первого теодолита отсчет O15, а со второго теодолита отсчет O25, а затем определяют поправочный коэффициент на неперпендикулярность входящей нормали рабочего отражателя устройства к его привалочной плоскости по формуле
δ=-δоп,
где δоп=O20-O25;
O20=O25+α54-90°;
α54=O14-O15;
O2п=O26-α16+90°;
α16=O16-O11;
O11=O12+0,5α23;
α23=O13-O12.
| СПОСОБ ОПРЕДЕЛЕНИЯ КРЕНА | 1997 |
|
RU2141622C1 |
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕМНЫХ ОБЪЕКТОВ ПО ЗАДАННЫМ СВЕТОВЫМ МАРКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079810C1 |
| Приспособление для промывки сетки сетчатого барабана папочной машины | 1934 |
|
SU44120A1 |
| Способ получения композиционных материалов на основе алюминидов никеля, армированных высокопрочными углеродными волокнами | 1983 |
|
SU1189124A1 |
| EP 1608840 B1, 24.09.2008. | |||

