Изобретение относится к области приборостроения и может быть использовано при выставке бортовых приборов на объектах различного назначения с целью обеспечения точности навигации объекта и работы его систем.
Известны способы выставки приборов относительно базовых направлений, использующие оптику (см., например, книгу А.Липтон «Выставка инерциальных систем на подвижном основании» М., 1971, стр.128-130), согласно которым оси систем координат, связанных с прибором, согласовываются с базовыми осями путем использования оптических систем, имеющих автоколлиматор. Для получения отраженного луча света на выставляемом приборе устанавливают отражатель в виде зеркала, призмы, который связан с его осью. По направлению базовой оси выставляют визирную ось автоколлиматора, с которого световой луч посылают на отражатель, выставляемого прибора. Отраженный луч попадает в объектив автоколлиматора и с его помощью определяют угол между прямым и отраженным лучом, который характеризует рассогласование между выставляемой осью прибора и базовой осью. Для согласования осей поворачивают прибор в направлении уменьшения угла рассогласования. Данный метод применяют, когда не нарушается линия оптической связи между автоколлиматором и отражателем.
За прототип взят способ выставки продольной оси навигационного прибора объекта (см. статью Eugene Н. Thompson, James L. Farrell, John W.Knight «Alignment Methods for Strapdown Inertial Siems» Journal of Spacecraft and RocKets, v.3, №9, 1966. - Р.1432-1434).
В этом способе предварительно на бортовом приборе закрепляют отражатель, входная нормаль которого направлена в сторону продольной оси прибора. Бортовой прибор устанавливают на объекте. Объект располагают в специальном месте, в котором теодолитом с автоколлиматором визируется приборный отражатель и геодезический ориентир, находящийся на удаленном расстоянии от объекта. Теодолит с помощью автоколлиматора выставляют по направлению входящей нормали отражателя, после чего наводят на удаленный ориентир. По горизонтальной шкале теодолита определяют угол ψ1 между этими двумя направлениями. Затем теодолит располагают в месте, позволяющем выставить его визирную ось по направлению продольной оси объекта, и при этом визировать удаленный ориентир. Выставляют визирную ось теодолита по направлению продольной оси объекта, после чего по направлению на удаленный ориентир. По горизонтальной шкале теодолита определяют угол ψ2 между этими направлениями. Определяют разность углов  которая характеризует невыставку продольной оси прибора относительно продольной оси объекта и используется для согласования осей путем поворота корпуса прибора по направлению уменьшения Δψ.
которая характеризует невыставку продольной оси прибора относительно продольной оси объекта и используется для согласования осей путем поворота корпуса прибора по направлению уменьшения Δψ.
В известном способе возможно согласовывать продольные оси объекта и бортового прибора при нарушении линии оптической связи между отражателем прибора и теодолитом, расположенным в месте, обеспечивающем также выставку его визирной оси по направлению продольной оси объекта. Так, например, выставка теодолита по направлению продольной оси объекта и по направлению на удаленный ориентир может происходить при его расположении на верхней части корпуса объекта, где расположены реперные точки его продольной оси. Но при этом с верхней части корпуса не визируется отражатель бортового прибора, потому что он находится в приборном отсеке, в который имеется доступ с нижней части корпуса. Наводка визирной оси теодолита по направлению входной нормали отражателя прибора и повторная наводка по направлению на удаленный ориентир проводятся при расположении теодолита в другом месте, например на поверхности площадки, на которой находится объект.
В известном способе имеются недостатки, снижающие точность согласования продольных осей объекта и бортового прибора, накладывающие ограничение на его применение.
В известном способе используются два пространственных положения теодолита: одно при выставке визирной оси теодолита по направлению продольной оси объекта, другое - при выставке визирной оси по направлению входящей нормали отражателя прибора. Практически из-за конструктивных и методических ограничений проекции этих двух точек местоположений теодолита на земную поверхность дают две разные геодезические точки, расстояние между которыми R. При этом возникает погрешность Δ в определении угла рассогласования Δψ

где L - расстояние до удаленного ориентира.
Так, при R=0,5 м, L=5000 м погрешность Δ=21,6''. При уменьшении L погрешность увеличивается: R=0,5 м, L=2500 м, Δ=43,2''.
При использовании известного способа требуется удаленный ориентир, организация которого не всегда возможна в местах, где требуется проведение согласования продольных осей прибора и объекта.
Использование в известном способе удаленного ориентира ограничено метеорологическими условиями (туман, снегопад, дождь), а также временем суток (ночь).
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является повышение точности согласования продольных осей объекта и бортового прибора, а также исключение ограничений, связанных с использованием удаленного ориентира.
Технический результат достигается тем, что в известном способе согласования продольных осей бортового прибора и объекта, включающем установку на бортовом приборе отражателя, выставку оптической оси теодолита Т1 по базовому направлению H1, совпадающему с направлением продольной оси объекта, снятие с теодолита Т1 отсчета  , последующую выставку оптической оси теодолита Т1 по направлению Н3, совпадающему с входящей нормалью отражателя прибора, снятие отсчета O13, определение угла рассогласования между этими направлениями, поворот корпуса прибора в сторону уменьшения угла рассогласования до требуемой величины, дополнительно в операции определения угла рассогласования предварительно измеряют угол невыставки δ входящей нормали отражателя относительно продольной оси прибора, устанавливают второй теодолит Т2 по левому или правому борту объекта таким образом, чтобы с него можно было визировать теодолит Т1, проводят согласование оптических осей теодолитов Т1 и Т2 по линии направления Н2л при установке теодолита Т2 по левому борту или по линии направления Н2л при установке теодолита Т2 по правому борту и расположении теодолита Т1 в месте визирования продольной оси объекта, берут отсчеты
, последующую выставку оптической оси теодолита Т1 по направлению Н3, совпадающему с входящей нормалью отражателя прибора, снятие отсчета O13, определение угла рассогласования между этими направлениями, поворот корпуса прибора в сторону уменьшения угла рассогласования до требуемой величины, дополнительно в операции определения угла рассогласования предварительно измеряют угол невыставки δ входящей нормали отражателя относительно продольной оси прибора, устанавливают второй теодолит Т2 по левому или правому борту объекта таким образом, чтобы с него можно было визировать теодолит Т1, проводят согласование оптических осей теодолитов Т1 и Т2 по линии направления Н2л при установке теодолита Т2 по левому борту или по линии направления Н2л при установке теодолита Т2 по правому борту и расположении теодолита Т1 в месте визирования продольной оси объекта, берут отсчеты  соответственно с теодолитов T1, T2 при установке теодолита 12 по левому борту и
соответственно с теодолитов T1, T2 при установке теодолита 12 по левому борту и  при установке теодолита T2 по правому борту, согласовывают оптические оси теодолитов Т1, Т2 по линии направления Н4Л при расположении теодолита T2 по левому борту или по линии направления Н4П при расположении теодолита T2 по правому борту в случае установки теодолита T1 в месте визирования отражателя прибора, берут отсчеты
при установке теодолита T2 по правому борту, согласовывают оптические оси теодолитов Т1, Т2 по линии направления Н4Л при расположении теодолита T2 по левому борту или по линии направления Н4П при расположении теодолита T2 по правому борту в случае установки теодолита T1 в месте визирования отражателя прибора, берут отсчеты  при расположении теодолита T2 по левому борту и
при расположении теодолита T2 по левому борту и  при расположении теодолита T2 по правому борту объекта, а затем угол рассогласования между продольными осями объекта и прибора определяют по формуле
при расположении теодолита T2 по правому борту объекта, а затем угол рассогласования между продольными осями объекта и прибора определяют по формуле
 при расположении теодолита Т2 по левому борту,
при расположении теодолита Т2 по левому борту,
 при расположении теодолита Т2 по правому борту.
при расположении теодолита Т2 по правому борту.
При анализе согласования продольных осей бортового прибора и объекта с применением предлагаемого способа используем схему расположения теодолитов, показанную на чертеже.
Установим теодолит Т1 на объекте или на площадке, где расположен объект, в точке А, с которой визируются реперные элементы Р1 и Р2, характеризующие продольную ось объекта ХC. Выставим визирную ось теодолита Т1 по направлению H1, проходящему через реперные элементы Р1 и Р2 на корпусе объекта, и снимем с теодолита Т1 отсчет . На площадке по левому борту объекта в точке Вл или правому борту в точке Вп установим теодолит Т2. Установка теодолита Т2 должна быть выполнена таким образом, чтобы с него можно было визировать теодолит Т1, сначала находящийся в точке А, а затем в точке С, с которой теодолитом Т1 визируется отражатель 3 прибора К. Согласуем визирные оси теодолитов Т1 и Т2 по линии направления Н2л(Н2п) и снимем с теодолитов Т1 и Т2 отсчеты  и О22 при расположении теодолита Т2 по левому борту и
и О22 при расположении теодолита Т2 по левому борту и  и
и  - при расположении теодолита Т2 по правому борту (* - характеризует отсчет, снятый по направлению, которое противоположно показанному на чертеже).
- при расположении теодолита Т2 по правому борту (* - характеризует отсчет, снятый по направлению, которое противоположно показанному на чертеже).
Снимем теодолит Т1 с точки А и расположим его на объекте или площадке в точке С, с которой визируются отражатель 3 прибора К и теодолит Т2. Установим в автоколлимационном режиме оптическую ось теодолита Т1 по направлению Н3, совпадающему с направлением входящей нормали отражателя прибора, и снимем с теодолита Т1 отсчет O13. Согласуем оптические оси теодолитов Т1 и Т2, находящиеся соответственно в точках С и Вл(Вп), по направлению Н4л(Н4п) и снимем с теодолитов Т1 и Т2 отсчеты  и О24 при расположении теодолита Т2 по левому борту и О14 и
и О24 при расположении теодолита Т2 по левому борту и О14 и  - при расположении теодолита Т2 по правому борту.
- при расположении теодолита Т2 по правому борту.
Определим угол ψ1л(ψ1п) между направлениями H1 и Н2л(Н2п).
При расположении теодолита Т2 по левому борту:

При расположении теодолита Т2 по правому борту:

Определим отсчет с теодолита Т2, когда его оптическая ось установлена по направлению H1.
При расположении теодолита Т2 по левому борту:

При расположении теодолита Т2 по правому борту:

Определим угол ψ2л(ψ2п) между направлениями H1 и Н4л(Н4п).
При расположении теодолита Т2 по левому борту:

При расположении теодолита Т2 по правому борту:

Определим отсчет с теодолита Т1 в точке С, когда его оптическая ось установлена по направлению Н1.
При расположении теодолита Т2 по левому борту:

При расположении теодолита Т2 по правому борту:

Определим угол Δψ* между направлением H1 продольной оси объекта и направлением Н3 входящей нормали отражателя 3 прибора К.
При расположении теодолита Т2 по левому борту:


При расположении теодолита Т2 по правому борту:

Определим угол рассогласования Δψ между направлением Н1 продольной оси объекта и направлением Н5 продольной оси бортового прибора

При расположении теодолита Т2 по левому борту

При расположении теодолита Т2 по правому борту

Таким образом, предлагаемый способ согласования продольных осей бортового прибора и объекта имеет следующие отличия от известного способа:
- в предварительной операции вводится новое действие, связанное с определением угла невыставки входящей нормали отражателя прибора относительно продольной оси объекта, что позволяет устранить при согласовании продольных осей прибора и объекта погрешность установки отражателя на приборе;
- в операции определения угла рассогласования между продольными осями объекта и прибора вводятся новые действия, связанные с установкой второго теодолита в месте, с которого можно выполнить согласование оптических осей первого и второго теодолитов при расположении первого теодолита как в месте визирования продольной оси объекта, так и в месте визирования отражателя прибора, что позволяет после операции выставки оптической оси бортового теодолита по направлению входящей нормали отражателя выставить на первом теодолите направление продольной оси объекта без использования специального удаленного ориентира и исключить зависимость от погодных условий и времени суток.
- определение угла рассогласования продольных осей бортового прибора и объекта проводится с применением новых аналитических зависимостей, использующих значения отсчетов, снятых с теодолитов.
На чертеже показана схема расположения теодолитов при определении угла рассогласования между продольными осями бортового прибора и объекта.
Проводился сравнительный расчет погрешностей измерения угла рассогласования продольных осей бортового прибора и объекта с применением предлагаемого и известного способов.
Ошибка определения угла рассогласования в предлагаемом способе обусловлена следующими погрешностями:
- погрешностью измерения угла невыставки δ входящей нормали отражателя относительно продольной оси прибора Н5,
- погрешностью выставки теодолита Т2 по направлению H1 продольной оси объекта,
- погрешностью выставки теодолита Т1 по направлению Н3 входящей нормали отражателя прибора;
- погрешностью выставки теодолита Т1, находящегося в месте визирования отражателя прибора, по направлению HI продольной оси объекта.
Погрешность измерения угла невыставки входящей нормали отражателя относительно продольной оси прибора будем характеризовать среднеквадратическим значением σ1п. Величина этой погрешности обусловлена погрешностями применения калибровочного приспособления σ11 и погрешностью оптических средств σ12. Для имеющихся калибровочных приспособлений σ11=6,5'', а оптических средств σ=3''.
Тогда

Погрешность выставки теодолита Т2 по направлению H1 продольной оси объекта вызвана следующими погрешностями:
- погрешностью выставки оптической оси теодолита Т1 по направлению H1 продольной оси объекта с использованием его реперных элементов,
- погрешностью согласования оптических осей теодолитов Т1 и Т2 по линии направления Н2л(Н2п).
Погрешность выставки оптической оси теодолита Т1 по направлению H1 продольной оси объекта обусловлена двумя погрешностями: систематической погрешностью δ2 и случайной погрешностью, характеризуемой среднеквадратическим значением σ2п. Систематическая погрешность определяется и учитывается, поэтому в расчете не используется. Случайная погрешность σ2п обусловлена погрешностью применяемого теодолита. При использовании, например, теодолита 2Т2А эта погрешность составляет σт=3''. При определении точности выставки теодолита Т1 по направлению HI продольной оси объекта берутся два отсчета. С учетом этого

Погрешность согласования оптических осей теодолитов Т1 и Т2 по линии направления Н2л(Н2п) будем характеризовать среднеквадратическим значением σ22.

Погрешность σ2п выставки теодолита Т2 по направлению H1 продольной оси объекта 
Погрешность σ3п выставки теодолита Т1 по направлению Н3 входящей нормали отражателя прибора

Погрешность σ42 выставки теодолита Т1 в месте визирования отражателя прибора по направлению H1 продольной оси объекта обусловлена погрешностью σ2п выставки теодолита Т2 по направлению продольной оси объекта и погрешностью согласования двух теодолитов

Рассмотренные погрешности являются некоррелированными случайными величинами.
Тогда среднеквадратическое значение погрешности определения угла рассогласования между продольной осью объекта и продольной осью бортового прибора при применении предлагаемого способа:

Ошибка определения угла рассогласования в известном способе обусловлена следующими погрешностями:
- погрешностью выставки входящей нормали отражателя относительно продольной оси Н5 бортового прибора;
- погрешностью измерения угла между продольной осью объекта и направлением НО на удаленный ориентир;
- погрешностью выставки оптической оси теодолита в месте визирования отражателя прибора по направлению НО на удаленный ориентир;
- погрешностью измерения угла между входящей нормалью отражателя бортового прибора и направлением на удаленный ориентир.
Погрешность выставки входящей нормали отражателя относительной продольной оси бортового прибора обусловлена конструктивно-технологическими факторами и в настоящее время характеризуется величиной предельной погрешности Δ1, которая равна не менее 60''. Тогда среднеквадратическое значение этой погрешности
σ1и=Δ1/2=60/2=30''.
Погрешность σ2и измерения угла между продольной осью объекта и направлением НО на удаленный ориентир состоит из погрешности  выставки оптической оси теодолита по направлению продольной оси объекта и погрешности
выставки оптической оси теодолита по направлению продольной оси объекта и погрешности  выставки его оптической оси на удаленный ориентир. Выставка оптической оси теодолита по направлению продольной оси объекта производится в известном и предлагаемом способах одинаково, поэтому
выставки его оптической оси на удаленный ориентир. Выставка оптической оси теодолита по направлению продольной оси объекта производится в известном и предлагаемом способах одинаково, поэтому

Погрешность выставки оптической оси теодолита на удаленный ориентир

Тогда 
Погрешность выставки оптической оси теодолита в месте визирования отражателя прибора по направлению НО на удаленный ориентир обусловлена точностью расположения теодолита в одной геодезической точке при операции выставки его оптической оси по направлению продольной оси объекта и при операции выставки его оптической оси по направлению входящей нормали отражателя. Практически эта величина может характеризоваться кругом с радиусом R=0,5 м. Тогда при расстоянии до удаленного ориентира L=5000 м предельная погрешность Δ2=21,6''. Среднеквадратическое значение этой погрешности σзи=Δ2/2=10,8''.
Погрешность σ4и измерения угла между входящей нормалью отражателя прибора и направлением на удаленный ориентир
Среднеквадратическое значение погрешности определения угла рассогласования между продольной осью объекта и продольной осью бортового прибора при применении известного способа

что в 2,6 больше, чем в предлагаемом способе.
Таким образом, использование предлагаемого способа позволяет существенно повысить точность определения угла рассогласования между продольной осью объекта и продольной осью бортового прибора.
Проводилась экспериментальная проверка предлагаемого способа путем согласования продольной оси инерциальной навигационной системы на объекте.
При определении угла рассогласования с использованием предлагаемого способа были получены следующие значения отсчетов с теодолитов:

Предварительно измеренный угол рассогласования между продольной осью инерциальной системы и входящей нормалью отражателя δ=1'23''.
Тогда, подставив эти значения в (6Л),
Δψ=332°32'53''-269°48'29''+151°59'29''-170°01'38''+315°38'49''-0°22'16''-1'23''=359°57'25''
Если Δψ>180°, то наименьший угол поворота бортового прибора до согласованного положения
Δψ0=360°-Δψ=360°-359°57'25''=2'35''
Использование предлагаемого способа позволяет исключить затраты на организацию специального удаленного ориентира, площадки под объект, с которой он наблюдается, а также зависимость операции согласования от погодных условий и времени суток; существенно повысить точность согласования продольных осей бортового прибора и объекта.
Повышение точности согласования и автономность при проведении этой операции расширяют область применения предлагаемого способа в авиастроении, кораблестроении и производстве наземной техники при выставке продольных осей бортовых приборов по направлению продольных осей объектов различного назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОГЛАСОВАНИЯ ПРОДОЛЬНЫХ ОСЕЙ МОНТАЖНОЙ РАМЫ ДЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И ОБЪЕКТА | 2011 |
|
RU2460041C1 |
| Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства | 2017 |
|
RU2657334C1 |
| СПОСОБ СОГЛАСОВАНИЯ ОСЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ С ОСЬЮ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА И ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436043C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| Способ разметки деталей приварного насыщения на поверхности в помещении судна | 1990 |
|
SU1795282A1 |
| СПОСОБ ЮСТИРОВКИ ПРИЕМО-ПЕРЕДАЮЩЕЙ ЛАЗЕРНОЙ ЛОКАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2120645C1 |
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| МАРКШЕЙДЕРСКИЙ ГИРОКОМПАС | 2010 |
|
RU2445574C1 |
| СПОСОБ МОНИТОРИНГА АВТОМОБИЛЬНОЙ ДОРОГИ | 2002 |
|
RU2226673C2 |
Изобретение относится к области приборостроения и может быть использовано при выставке бортовых приборов на объектах различного назначения с целью обеспечения точности навигации объекта и работы его систем. Технической результат - повышение точности. Для достижения данного результата предварительно измеряют угол рассогласования входящей нормали отражателя бортового прибора относительно его продольной оси. При этом выставляют оптическую ось первого теодолита по направлению продольной оси объекта и по направлению входящей нормали отражателя бортового прибора. Второй теодолит устанавливают по левому или правому борту объекта таким образом, чтобы с него можно было визировать первый теодолит. Осуществляют согласование оптических осей теодолитов при расположении первого теодолита в месте визирования продольной оси объекта, после чего согласовывают оптические оси теодолитов. 1 ил.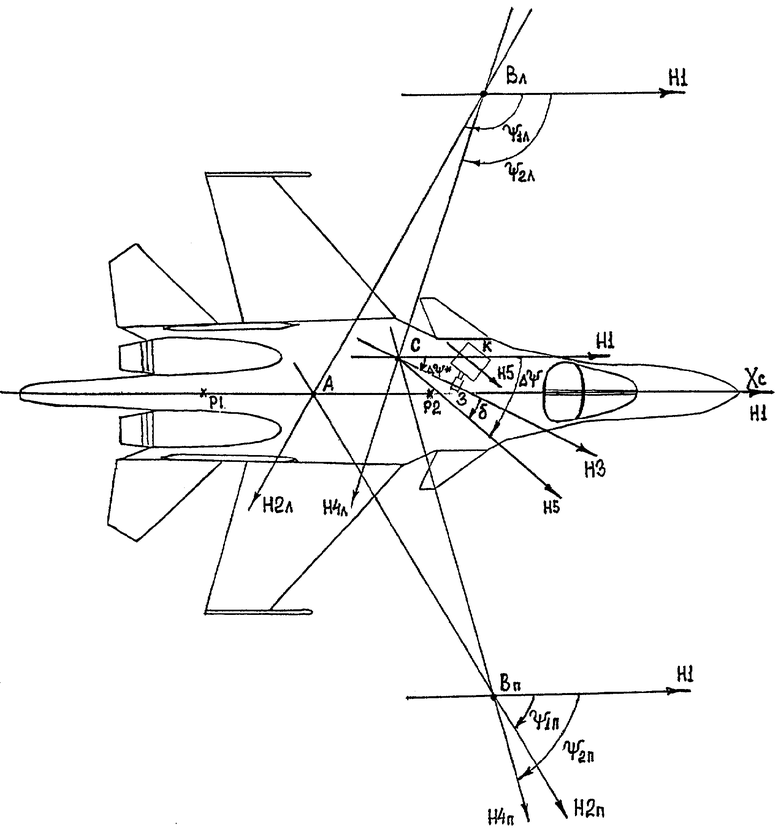
Способ согласования продольных осей бортового прибора и объекта, включающий установку на бортовом приборе отражателя, выставку оптической оси теодолита Т1 по базовому направлению H1, совпадающему с направлением продольной оси объекта, снятие с теодолита Т1 отсчета  , последующую выставку оптической оси теодолита Т1 по направлению Н3, совпадающему с входящей нормалью отражателя прибора, снятие отсчета O13, определение угла рассогласования между этими направлениями, поворот корпуса прибора в сторону уменьшения угла рассогласования до требуемой величины, отличающийся тем, что в операции определения угла рассогласования предварительно измеряют угол невыставки δ входящей нормали отражателя относительно продольной оси прибора, устанавливают второй теодолит Т2 по левому или правому борту объекта таким образом, чтобы с него можно было визировать теодолит Т1, проводят согласование оптических осей теодолитов Т1 и Т2 по линии направления Н2л при установке теодолита Т2 по левому борту или по линии направления Н2п при установке теодолита Т2 по правому борту и расположении теодолита Т1 в месте визирования продольной оси объекта, берут отсчеты
, последующую выставку оптической оси теодолита Т1 по направлению Н3, совпадающему с входящей нормалью отражателя прибора, снятие отсчета O13, определение угла рассогласования между этими направлениями, поворот корпуса прибора в сторону уменьшения угла рассогласования до требуемой величины, отличающийся тем, что в операции определения угла рассогласования предварительно измеряют угол невыставки δ входящей нормали отражателя относительно продольной оси прибора, устанавливают второй теодолит Т2 по левому или правому борту объекта таким образом, чтобы с него можно было визировать теодолит Т1, проводят согласование оптических осей теодолитов Т1 и Т2 по линии направления Н2л при установке теодолита Т2 по левому борту или по линии направления Н2п при установке теодолита Т2 по правому борту и расположении теодолита Т1 в месте визирования продольной оси объекта, берут отсчеты  соответственно с теодолитов Т1, Т2 при установке теодолита Т2 по левому борту и
соответственно с теодолитов Т1, Т2 при установке теодолита Т2 по левому борту и  или установке теодолита Т2 по правому борту, согласовывают оптические оси теодолитов Т1, Т2 по линии направления Н4л при расположении теодолита Т2 по левому борту или по линии направления Н4п при расположении теодолита Т2 по правому борту в случае установки теодолита Т1 в месте визирования отражателя прибора, берут отсчеты
или установке теодолита Т2 по правому борту, согласовывают оптические оси теодолитов Т1, Т2 по линии направления Н4л при расположении теодолита Т2 по левому борту или по линии направления Н4п при расположении теодолита Т2 по правому борту в случае установки теодолита Т1 в месте визирования отражателя прибора, берут отсчеты  при расположении теодолита Т2 по левому борту и
при расположении теодолита Т2 по левому борту и  при положении теодолита Т2 по правому борту объекта, а затем угол рассогласования между продольными осями объекта и прибора определяют по формуле
при положении теодолита Т2 по правому борту объекта, а затем угол рассогласования между продольными осями объекта и прибора определяют по формуле
 при расположении теодолита Т2 по левому борту,
при расположении теодолита Т2 по левому борту,
 при расположении теодолита Т2 по правому борту.
при расположении теодолита Т2 по правому борту.
| Eugene H | |||
| Thompson, James L | |||
| Farrell, John W.Knight «Alignment Methods for Strapdown Inertial Siems» Journal of Spacecraft and RocKets, v.3, №9, 1966 | |||
| Паровой крыльчатый насос | 1921 |
|
SU1432A1 |
| Липтон А | |||
| Выставка инерциальных систем на подвижном основании | |||
| М.: Машиностроение, 1971, с.128-130 | |||
| Способ измерения угла поворота материального объекта вокруг оси вращения | 1990 |
|
SU1749703A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ИЗДЕЛИЯ | 0 |
|
SU244652A1 |
| Данилов В.В | |||
| и др | |||
| Геодезия | |||
| М.: Недра, 1974, с.74. | |||

