Изобретение относится к измерительной технике, а именно к коррекции угловых параметров (углов азимута, крена, тангажа), определяемых инерциальной навигационной системой наземного транспортного средства, для их учета в процессе проведения топогеодезических измерений.
Известен топопривязчик УА3-452Т (см. Топопривязчик УА3-452Т. Техническое описание и инструкция по эксплуатации БИ2 511 003 ТО, стр.38, 39, 41, 42, 75).
В данном Техническом описании и инструкции по эксплуатации изложены основы (способ) выверки визира и приборов навигационной аппаратуры и определены необходимые средства для выверки, принятые за прототип.
Выверка визира заключается в том, что при установке нулевого отсчета на его угломерных шкалах оптическая ось визира должна быть параллельна продольной оси транспортного средства, т.е. направлению движения (курсу).
Выверка визира производится в следующем порядке:
- на прямолинейном участке дороги (около 1000 м) отмечается начальная и конечная точки маршрута выверки (за створами точек выставляются вехи);
- топопривязчик устанавливается на начальной точке по направлению к конечной;
- на счетчиках Х и Y навигационной аппаратуры устанавливаются нулевые показания;
- визир наводится на веху, выставленную за створом конечной точки, и снимается отсчет (угол βвиз);
- определяется исходный дирекционный угол αоси по формуле: αоси=60-00-βВИЗ и устанавливается на курсовых шкалах навигационной аппаратуры;
- далее топопривязчик проезжает отмеченный участок маршрута по прямой и устанавливается на конечной точке;
- снимается отсчет по счетчикам Х и Y навигационной аппаратуры;
- определяется величина углового смещения оптической оси визира относительно продольной оси топопривязчика по формуле:
где XПР - отсчет по счетчику X;
δY - отсчет по счетчику Y;
- делается два рейса (в прямом и обратном направлении) и определяется величина углового смещения оптической оси визира для каждого рейса в отдельности;
Из полученных значений Δβ определяется средняя ошибка Δβср. Если величина Δβср превышает установленное значение, необходимо в установку визира ввести поправку в следующем порядке:
- на неподвижном топопривязчике горизонтируется визир по уровню;
- визир наводится на удаленный на расстояние не менее 1000 м ориентир;
- вводится поправка Δβср в соответствии с инструкцией по использованию визира;
- после внесения поправки Δβср совершается контрольный рейс и определяется ΔβКонт, которая должна быть не более установленного значения.
Далее производится выверка приборов навигационной аппаратуры топопривязчика по координатам двух опорных точек.
Опорные точки должны располагаться на удалении 2-3 км одна от другой. На каждой из точек должны быть известны дирекционные углы направлений на ориентирные точки.
Маршрут движения топопривязчика между опорными точками выбирается так, чтобы он приближался к прямолинейному. Для выверки необходимо:
- по координатам начальной A (X1, Y1) и конечной B (X2, Y2) точек маршрута вычислить дирекционный угол направления этой линии (αх) по формуле:
 ;
;
- установить топопривязчик на начальной точке, навести визир на ориентир и снять отсчет (βВИЗ);
- вычислить дирекционный угол оси топопривязчика αОСИ УСЛ в условной системе координат, координатные оси которой повернуты на величину угла αX так, что ось X совпадает с направлением на конечную точку, по формуле:
αОСИ УСЛ=(αОР-αХ)-βВИЗ,
где αОР - дирекционный угол направления с начальной точки на ориентир;
- включить навигационную аппаратуру;
- установить нулевые значения на счетчиках X, Y навигационной аппаратуры, а на курсовых шкалах установить αОСИ УСЛ;
- зафиксировать время начала движения и проехать по выбранному маршруту до конечной точки;
- на конечной точке зафиксировать время прибытия и снять отсчеты со счетчика X (XПР) и со шкал курса;
- определить величину ухода гироскопа (Δα), для этого навести визир на ориентир, снять отсчет (βВИЗ) и по вышеуказанной формуле вычислить дирекционный угол оси топопривязчика αОСИ УСЛ;
определить величину поправки как разность вычисленной величины дирекционного угла оси топопривязчика αОСИ УСЛ и величины, считанной со курсовых шкал αОСИ ПР:
Δα=αОСИ УСЛ-αОСИ ПР,
- делается два рейса (в прямом и обратном направлении) и определяется величина поправки для каждого рейса в отдельности;
из полученных значений Δα определяется средняя ошибка Δαср, которая в качестве поправки вводится в навигационную аппаратуру.
Недостатками способа, принятого за прототип, являются:
- недостаточная точность согласования осей навигационной аппаратуры и продольной оси топопривязчика;
- невозможность определения поправок на углы наклона транспортного средства относительно горизонта (углов крена и тангажа);
- высокая трудоемкость и большие временные затраты на проведение регулировочных работ, обусловленные длительным временем нахождения топопривязчика на маршруте (испытательной трассе).
Предлагаемым изобретением решается задача по повышению эффективности и точности регулировочных работ, проводимых на наземном транспортном средстве, оснащенном инерциальной навигационной системой и оптическим прибором визирования, с помощью измерительного комплекса, реализующего данный способ.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа согласования осей инерциальной навигационной системы с осью наземного транспортного средства и создании с минимальными затратами измерительного комплекса для его осуществления, обеспечивающих достижение параллельности линии визирования оптического прибора (визира) при нулевой установке шкалы угла места относительно продольной оси транспортного средства с наименьшей погрешностью и определение исходных поправок в угловые параметры (углы азимута, крена, тангажа), определяемые инерциальной навигационной системой для их учета в бортовом программно-аппаратном комплексе.
Указанный технический результат достигается тем, что в предлагаемом способе согласования осей инерциальной навигационной системы с осью наземного транспортного средства, заключающемся в том, что на первоначальном этапе производятся регулировочные работы с визиром, определяется величина углового смещения оптической оси визира относительно продольной оси транспортного средства, далее производится выверка навигационной аппаратуры, определяется величина поправки дирекционного угла оси транспортного средства, определение величины поправки повторяется несколько раз с дальнейшим вычислением средней ошибки, новым является то, что на первом этапе производятся регулировочные работы со штатным визиром транспортного средства (ТС), для чего ТС в поле допуска устанавливается на юстировочном участке, вывешивается на домкратах или иных подъемных устройствах, после чего горизонтируется установочная плита, на которой закреплен визир, а затем - собственно сам визир, далее выставляются нулевые отсчеты визира при наведении его на перекрестие юстировочной мишени, установленной таким образом, чтобы ее ось симметрии совпадала с вертикальной плоскостью, проходящей через ось симметрии юстировочного участка, а вертикальное положение было выставлено по отвесу, на втором этапе проводится горизонтирование установочной плиты под инерциальную навигационную систему (ИНС), на третьем этапе производится определение исходных значений «эталонных» углов: азимута Ax (дирекционного угла αх), продольной оси ТС и углов наклона ТС относительно горизонта (углов крена βк и тангажа γк) после установки ТС на контрольной точке (КТ), его поддомкрачивания с одновременным обеспечением видимости теодолитом удаленного ориентира и зеркала переходной плиты ИНС, с дальнейшим определением с помощью теодолита автоколлимационным способом угла Aт, (αт) между направлением на ориентир и нормалью юстировочного зеркала переходной плиты и вычислением азимута (дирекционного угла) на нормаль зеркала переходной плиты, который в дальнейшем принимается за «эталонное» значение исходного азимута (дирекционного угла) Aэ (αэ), определение с помощью приборов для измерения и установки углов наклона к горизонтальной плоскости, размещаемых на площадке переходной плиты, углов крена и тангажа, которые принимаются за «эталонные» значения βэ и γэ, на четвертом этапе производится включение и перевод ИНС в режим «Навигация», при котором определяются значения углов Aгк (αгк), βгк, γгк, на пятом этапе производится вычисление исходных поправок на угловые показания ИНС для их ввода в бортовой программно - аппаратный комплекс ТС.
Для упрощения процесса определения поправок на угловые показания ИНС третий этап может выполняться следующим образом. После установки ТС на контрольной точке (КТ), его поддомкрачивания «эталонные» углы Ax=Aэ, αх=αэ, βк=βэ, γк=γэ определяются с использованием штатного визира ТС.
Этот способ согласования осей инерциальной навигационной системы с осью наземного транспортного средства реализуется в предлагаемом измерительном комплексе для его осуществления, содержащем визир и навигационную аппаратуру контролируемого транспортного средства, контрольную точку маршрута (испытательной трассы) с известными координатами и азимутом (дирекционным углом) на удаленный на расстояние ориентир, в котором новым является то, что согласование осей ИНС с осью наземного ТС проводят на измерительном комплексе, включающем в себя следующие сооружения, измерительные и вспомогательные средства: котировочный участок, оборудованный площадкой для ТС в закрытом помещении с твердым напольным покрытием, оснащенным разметкой, для установки ТС, выносной юстировочной мишенью с разметкой на ее поле, внешним источником электропитания для подключения аппаратуры ТС, домкратами или иными подъемными устройствами соответствующей грузоподъемности, приборами для измерения и установки углов наклона к горизонтальной плоскости, отвесом, угломерным измерительным прибором, испытательную трассу для оценки точности определения геодезических данных, оборудованную контрольными точками (КТ) с известным азимутом (дирекционным углом) на удаленный предмет (ориентир), представляющую собой физический предмет (металлический костыль, кол, камень и т.п.) или специальную метку на площадке, обеспечивающую прямую видимость на ориентир.
Проведение на первом этапе регулировочных работ со штатным визиром ТС позволяет обеспечить параллельность линии визирования визира при нулевой установке шкалы угла места относительно продольной оси топопривязчика с погрешностью не более 30″.
Установка ТС в поле допуска на юстировочном участке с вывешиванием его на домкратах позволяет обеспечить необходимую точность проведения регулировочных работ, исключив при этом качание ТС за счет амортизаторов и рессор.
Горизонтирование установочной плиты, на которой закреплен визир, а затем - собственно самого визир, позволяет:
- провести предварительную оценку уровня горизонтирования установочной плиты визира вдоль и поперек продольной оси ТС, определить ее углы наклона;
- пользуясь домкратами или иными подъемными устройствами соответствующей грузоподъемности, вывести приборы для измерения и установки углов наклона к горизонтальной плоскости в нулевое положение;
- отгоризонтировать визир за счет его штатных механизмов горизонтирования.
После выставки нулевых отсчетов визира при наведении его на перекрестие юстировочной мишени, установленной таким образом, чтобы ее ось симметрии совпадала с вертикальной плоскостью, проходящей через ось симметрии юстировочного участка, а вертикальное положение было выставлено по отвесу, позволяет обеспечить требуемую параллельность линии визирования визира относительно продольной оси ТС.
Проведение на втором этапе горизонтирования установочной плиты под ИНС позволяет обеспечить параллельность установочных поверхностей визира и ИНС.
Проведение на третьем этапе определения исходных значений «эталонных» углов: азимута Ax (дирекционного угла αх), продольной оси ТС и углов наклона ТС относительно горизонта (углов крена βк и тангажа γк) позволяет в дальнейшем обеспечить коррекцию расширенного состава угловых параметров, вырабатываемых ИНС.
Установка ТС на КТ, его поддомкрачивание с одновременным обеспечением видимости теодолитом удаленного ориентира и зеркала переходной плиты ИНС позволяет обеспечить неподвижность ТС и выполнить подготовительные работы для определения «эталонного» значения исходного азимута (дирекционного угла) Aэ (αэ).
Определение с помощью теодолита автоколлимационным способом угла Aт (αт) между направлением на ориентир и нормалью юстировочного зеркала переходной плиты и вычислением азимута (дирекционного угла) на нормаль зеркала переходной плиты, который в дальнейшем принимается за «эталонное» значение исходного азимута (дирекционного угла) Aэ (αэ), позволяет обеспечить требуемую точность вычисления.
Определение с помощью приборов для измерения и установки углов наклона к горизонтальной плоскости, размещаемых на площадке переходной плиты, углов крена и тангажа, которые принимаются за эталонные значения βэ и γэ, позволяет обеспечить простым способом, за счет применения приборов с соответствующим классом точности, минимальную погрешность измерений.
Включение и перевод ИНС в режим «Навигация» на четвертом этапе, при котором определяются значения углов Aгк (αгк), βгк, γгк, позволяет получить реальные значения угловых параметров, определяемых ИНС на КТ.
Вычисление исходных поправок на угловые показания ИНС для их ввода в бортовой программно-аппаратный комплекс ТС позволяет получить отклонение средних значений угловых параметров ИНС от «эталонных» значений, определить значения поправок на угловые показания ИНС для их учета при работе в реальных условиях эксплуатации.
Определение углов Ax=Аэ, αх=αэ, βк=βэ, γк=γэ с использованием штатного визира ТС позволяет:
- упростить процесс определения поправок на угловые показания ИНС при сохранении точностных характеристик получаемых параметров;
- использовать переходную плиту ИНС менее сложной конструкции;
- снизить временные затраты.
Проведение согласования осей ИНС с осью наземного ТС на измерительном комплексе, включающем в себя сооружения и комплект измерительных и вспомогательных средств, позволяет обеспечить реализацию способа согласования осей ИНС с осью наземного ТС, а также выполнение других проверок и регулировочных работ с навигационной и топогеодезической аппаратурой ТС.
Оборудование юстировочного участка площадкой для ТС в закрытом помещении с твердым напольным покрытием, оснащенным разметкой для установки ТС, выносной юстировочной мишенью с разметкой на ее поле, позволяет:
- проводить регулировочные работы при различных климатических условиях;
- производить безопасное поддомкрачивание ТС различной грузоподъемности;
- устанавливать и обеспечивать сохранность вспомогательного оборудования;
- устанавливать ТС на юстировочном участке в поле допуска в соответствии с нанесенной разметкой.
Внешний источник электропитания позволяет производить подключение аппаратуры ТС без запуска его двигателя.
Оснащение юстировочного участка домкратами или иными подъемными устройствами соответствующей грузоподъемности, приборами для измерения и установки углов наклона к горизонтальной плоскости, отвесом, угломерным измерительным прибором позволяет обеспечить весь комплекс регулировочных работ с оптическими и навигационными приборами, автошасси ТС.
Введение в состав измерительного комплекса испытательной трассы для оценки точности определения геодезических данных, оборудованной КТ с известным азимутом (дирекционным углом) на удаленный предмет (ориентир), представляющую собой физический предмет (металлический костыль, кол, камень и т.п.) или специальную метку на площадке, обеспечивающую прямую видимость на ориентир, позволяет:
- выполнять работы по согласованию осей инерциальной навигационной системы с осью наземного ТС, а также по проверке навигационных параметров, определяемых аппаратурой ТС;
- обеспечить необходимую точность при регулировочных и проверочных работах;
- обеспечить долговременное и надежное размещение оборудования.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема выверки приборов навигационной аппаратуры топопривязчика по координатам двух точек (условная система координат указана пунктиром); на фиг.2 - схема юстировочного участка; на фиг.3 - схема юстировочной мишени; на фиг.4 - схема размещения оборудования КТ; на фиг.5 - схема размещения ИНС на ТС; на фиг.6 - схема согласования осей ТС и ИНС на переходной плите с зеркалом; на фиг.7 - схема согласования осей ТС и ИНС на переходной плите без зеркала.
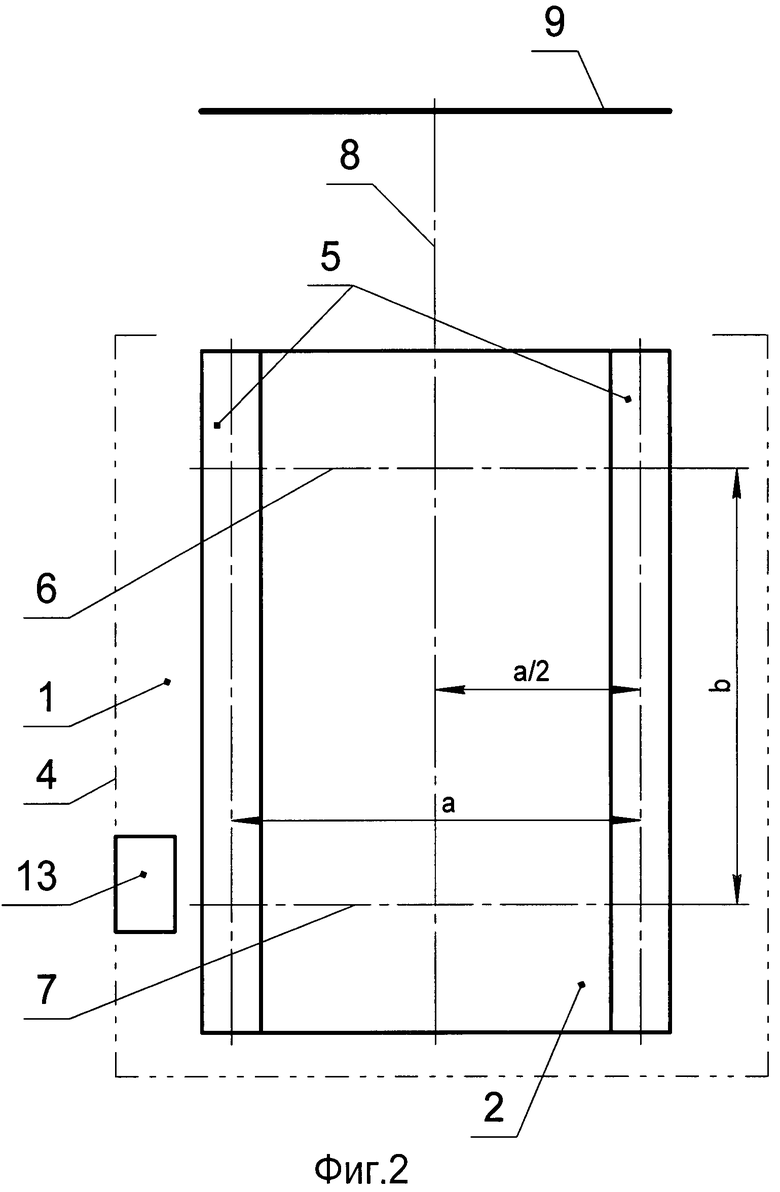
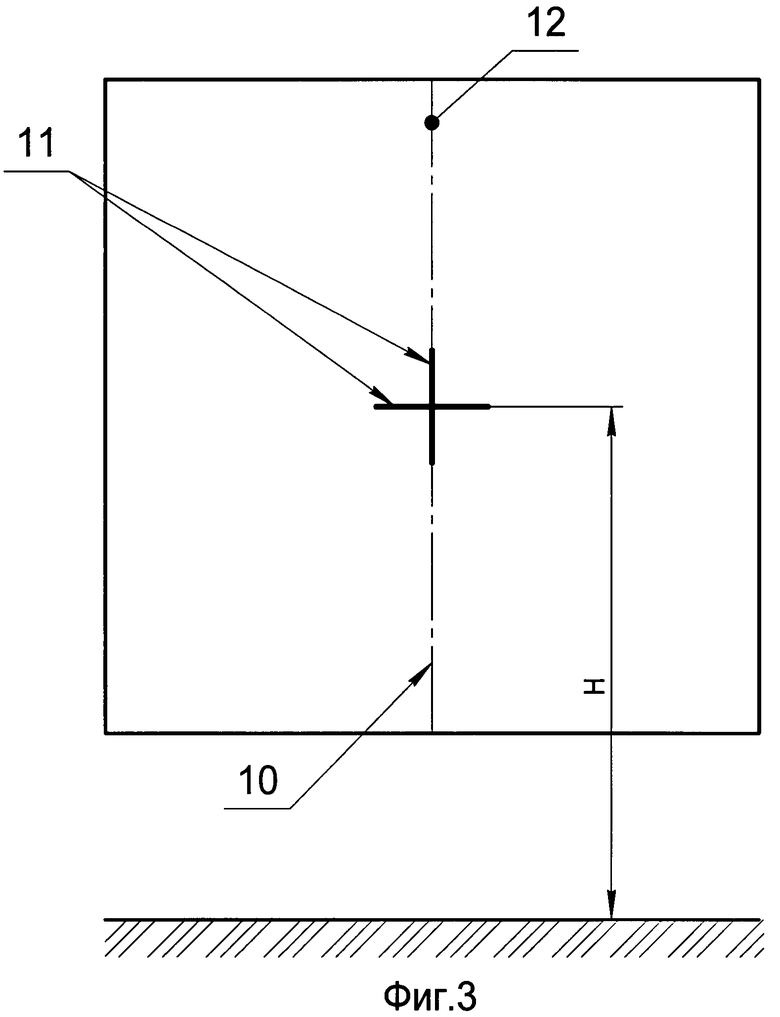
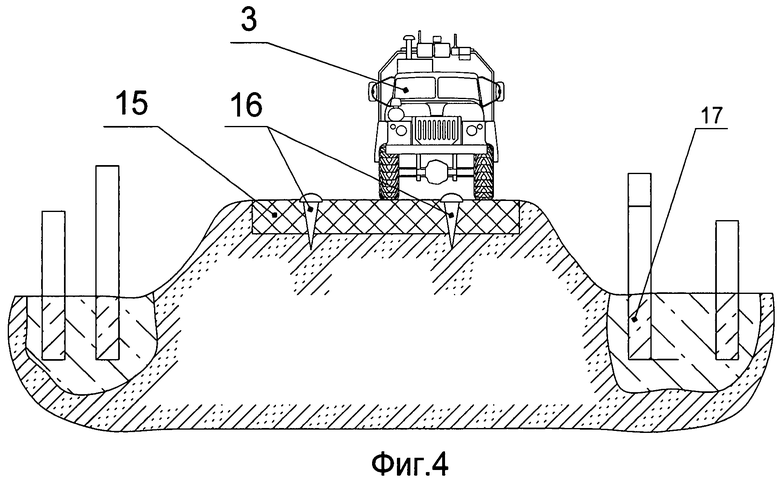
Измерительный комплекс для осуществления данного способа содержит юстировочный участок 1, оборудованный площадкой 2 для ТС 3 в закрытом помещении 4 с твердым напольным покрытием, оснащенным разметкой для установки контролируемого ТС 3, состоящей из разметочных полос 5 для колес, линий установки передней 6 и задней 7 осей ТС 3, осевой линии юстировочного участка 8, выносной юстировочной мишенью 9 с разметкой на ее поле, состоящей из осевой линии 10 юстировочной мишени 9, линий наведения 11, точки крепления отвеса 12 (отвес на чертежах не показан), внешним источником электропитания 13 для подключения аппаратуры ТС 3, домкратами или иными подъемными устройствами соответствующей грузоподъемности (на чертежах не показаны), приборами для измерения и установки углов наклона к горизонтальной плоскости (на чертежах не показаны), угломерным измерительным прибором (теодолитом) 14, испытательную трассу 15 для оценки точности определения геодезических данных, оборудованную КТ 16, располагающимися на правом краю дорожного полотна в прямом и обратном направлении и закрепленными пронумерованными створными знаками 17. Осевые линии разметочных полос 5 размещены друг от друга на расстоянии «a», равном ширине колеи ТС 3. Расстояние «b» между осями 6 и 7 соответствует колесной базе ТС 3. Центр юстировочной мишени 9 располагается от поверхности грунта на высоте H, равной высоте размещения оптической оси визира 18 ТС 3.
Способ согласования осей инерциальной навигационной системы с осью наземного транспортного средства реализуется в измерительном комплексе для его осуществления следующим образом.
1. На первом этапе производятся регулировочные работы со штатным визиром 18 ТС 3:
а) ТС устанавливается на юстировочном участке 1 так, чтобы его колеса не выходили из поля допуска, обозначенного разметочными полосами 5;
б) используя домкраты или иные подъемные устройства, ТС 3 вывешивается, исключив при этом качание за счет амортизаторов и рессор;
в) устанавливается юстировочная мишень 9 таким образом, чтобы вертикальная плоскость, проходящая через ось симметрии 8 юстировочного участка 1, совпадала с осью симметрии 10 юстировочной мишени 9. Вертикальное положение юстировочной мишени 9 выставляется по отвесу (на чертежах не показан), закрепленному в точке 12;
г) горизонтируется установочная плита 19 визира по приборам для измерения и установки углов наклона к горизонтальной плоскости (квадрантам КО-10, на чертежах не показаны);
д) квадранты КО-10 устанавливаются на установочную плиту 19 визира 18 для предварительной оценки уровня горизонтирования вдоль и поперек продольной оси ТС 3, определяются углы наклона установочной плиты 19;
е) пользуясь домкратами, квадранты выводятся в нулевое положение;
ж) далее горизонтируется визир 18 за счет механизмов его горизонтирования;
з) перекрестие сетки визира 18 совмещается с перекрестием линий наведения 11 на юстировочной мишени 9 и устанавливаются отсчеты по шкале угломерного механизма 0-00 и по шкале отражателя 0-00 визира 18.
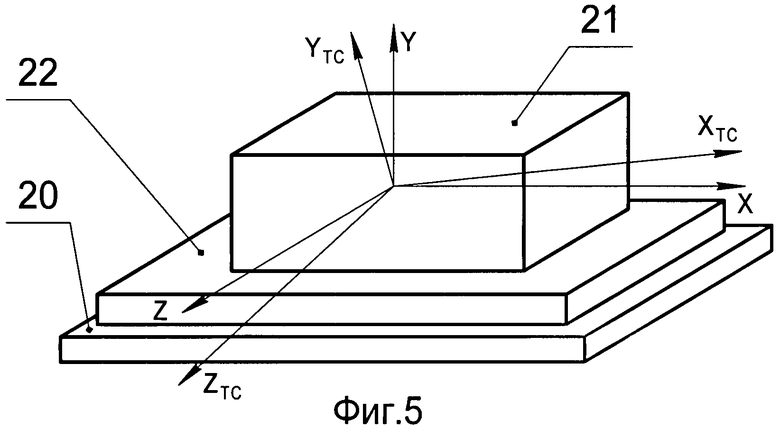
2. На втором этапе проводится горизонтирование установочной плиты 20 под ИНС 21:
а) квадранты КО-10 устанавливаются на установочную плиту 20, на которой будет установлена переходная плита 22 ИНС 21, для предварительной оценки уровня горизонтирования вдоль и поперек продольной оси ТС 3, определяются углы наклона установочной плиты 20;
б) при необходимости дальнейшего горизонтирования ослабляются крепежные болты и при помощи юстировочных прокладок (на чертежах не показаны), устанавливаемых под плиту 20, квадранты КО-10 выводятся в нулевое положение, после чего затягиваются крепежные болты;
г) ТС снимается с домкратов.
3. На третьем этапе производится определение исходных значений «эталонных» углов: азимута Ax (дирекционного угла αх), продольной оси ТС 3 и углов наклона ТС 3 относительно горизонта (углов крена (βк и тангажа γк):
а) ИНС 21 устанавливается и закрепляется на переходной плите 22 с совмещением привалочных площадок основания ИНС 21 и соответствующих площадок плиты 22;
б) переходная плита 22 с ИНС 21 закрепляется на установочной плите 20 так, чтобы направление оси «X» ИНС 21 совпало с направлением движения ТС 3 «Вперед»;
в) теодолит 14 устанавливается на линии «КТ-Ориентир» с отклонением не более ±0,25 м;
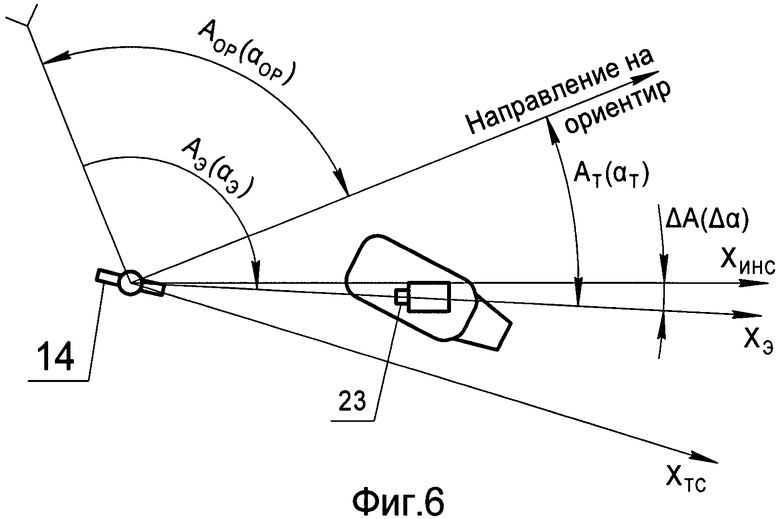
г) ТС 3 должно быть установлено на КТ 16 испытательной трассы 15, на площадке с твердым грунтом, с одновременным обеспечением видимости теодолитом 14 удаленного ориентира и зеркала 23 переходной плиты 22 ИНС 21;
д) обеспечивается неподвижность ТС 3 его поддомкрачиванием с допустимыми углами крена и тангажа ±2°;
е) с помощью теодолита 14 ТС 3 автоколлимационным способом определяется угол Aт, (αт) между направлением на ориентир и нормалью юстировочного зеркала 23 переходной плиты 22;
ж) вычисляется азимут (дирекционный угол) на нормаль зеркала 23 переходной плиты 22, который в дальнейшем принимается за эталонное значение исходного азимута (дирекционного угла) Aэ (αэ) для ИНС 21 по формуле:
Aэ(αэ)=Aор(αop)±Aт(αт)±360°(±60-00);
3) формульные зависимости определения Aэ (αэ):
- при Aэ>360° (60-00) вычесть 360° (60-00), при Aэ<0° (00-00) прибавить 360° (60-00);
и) с помощью квадранта КО-10, размещаемого на площадке переходной плиты 22, определяются углы крена и тангажа, которые в дальнейшем принимаются за «эталонные» значения βэ и γэ для изделия ИНС 21.
4. На четвертом этапе определяются значения углов Aгк (αгк), βгк, γгк:
а) включается ИНС 21 и осуществляется работа в режиме «Гирокомпасирование»;
б) после перехода ИНС 21 в режим «Навигация» определяются значения углов, определенных ИНС 21:
Aгк (αгк), βгк, γгк;
в) работа ИНС 21 повторяется не менее 6 раз;
г) общее число запусков может быть увеличено при несоблюдении неравенств:


д) ИНС 21 выключается, а ТС 3 снимается с домкратов.
е) находятся средние значения углов 
 ,
,  ,
,  , определенных ИНС 21 по формуле:
, определенных ИНС 21 по формуле:
где Xji - значение j углового параметра в «i»-м запуске;
n - общее число запусков.
5. На пятом этапе производится вычисление исходных поправок на угловые показания ИНС для их ввода в бортовой программно-аппаратный комплекс ТС:
а) определяется отклонение средних значений угловых параметров ИНС 21 от их «эталонных» значений:
 ,
,  ,
,  ,
,  ;
;
б) определяются значения поправок на угловые показания ИНС 21 для их ввода в бортовой программно-аппаратный комплекс ТС:
ΔAП=-ΔA; ΔαП=-Δα; ΔβП=-Δβ; ΔγП=-Δγ.
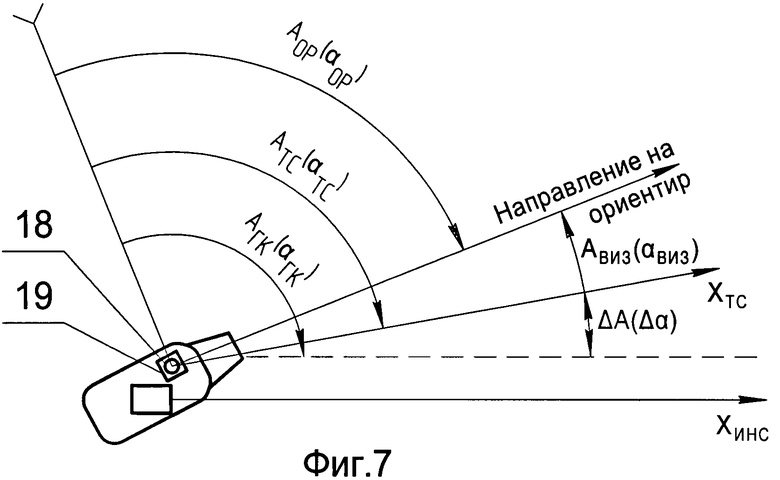
Для упрощения процесса определения поправок на угловые показания ИНС 21 третий этап может выполняться следующим образом:
а) после установки ТС 3 на КТ 16, его поддомкрачивания «эталонные» углы Ax=Aэ, αх=αэ, βк=βэ, γк=γэ, определяются с использованием штатного визира 18 ТС 3;
б) ТС 3 устанавливается на КТ 16, на площадке с твердым грунтом, с допустимым отклонением места закрепления штатного визира 18 относительно центра КТ в диапазоне ±0,4 м;
в) с использованием визира 18 ТС 3 определяется азимут Ax (дирекционный угол αх), продольной оси «X» ТС 3 и углы его наклона относительно горизонта (углов крена βк и тангажа γк), которые в дальнейшем принимаются в качестве «эталонных»:
Ax=Aэ, αх=αэ, βк=βэ, γк=γэ.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа согласования осей инерциальной навигационной системы с осью наземного транспортного средства и создании с минимальными затратами измерительного комплекса для его осуществления, обеспечивающих достижение параллельности линии визирования оптического прибора (визира) при нулевой установке шкалы угла места относительно продольной оси транспортного средства с наименьшей погрешностью и определение исходных поправок в угловые параметры (углы азимута, крена, тангажа), определяемые инерциальной навигационной системой для их учета в бортовом программно-аппаратном комплексе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства | 2017 |
|
RU2657334C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| Способ контроля точностных характеристик системы топопривязки и навигации | 2016 |
|
RU2659614C9 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА | 2014 |
|
RU2572407C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС | 2014 |
|
RU2573247C1 |
| СПОСОБ СОГЛАСОВАНИЯ ЛИНИИ ВИЗИРОВАНИЯ ОПТИЧЕСКОГО ПРИБОРА С ПРОДОЛЬНОЙ ОСЬЮ БАЗОВОГО ШАССИ ЗЕНИТНОГО СРЕДСТВА | 2023 |
|
RU2810238C1 |
| ТОПОПРИВЯЗЧИК | 2015 |
|
RU2591113C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498221C1 |
Изобретение относится к измерительной технике, а именно к коррекции угловых параметров (углов азимута, крена, тангажа), определяемых инерциальной навигационной системой наземного транспортного средства, для их учета в процессе проведения топогеодезических измерений. Технический результат - повышение точности. Для достижения данного результата на первоначальном этапе производятся регулировочные работы с визиром, определяется величина углового смещения оптической оси визира относительно продольной оси транспортного средства, далее производится выверка навигационной аппаратуры, определяется величина поправки дирекционного угла оси транспортного средства, определение величины поправки повторяется несколько раз с дальнейшим вычислением средней ошибки. При этом измерительный комплекс содержит визир и навигационную аппаратуру контролируемого транспортного средства, контрольную точку маршрута (испытательной трассы) с известными координатами и азимутом (дирекционным углом) на удаленный на расстояние ориентир. Согласование осей инерциальной системы с осью наземного транспортного средства проводят на измерительном комплексе. 2 н. и 1 з.п. ф-лы, 7 ил.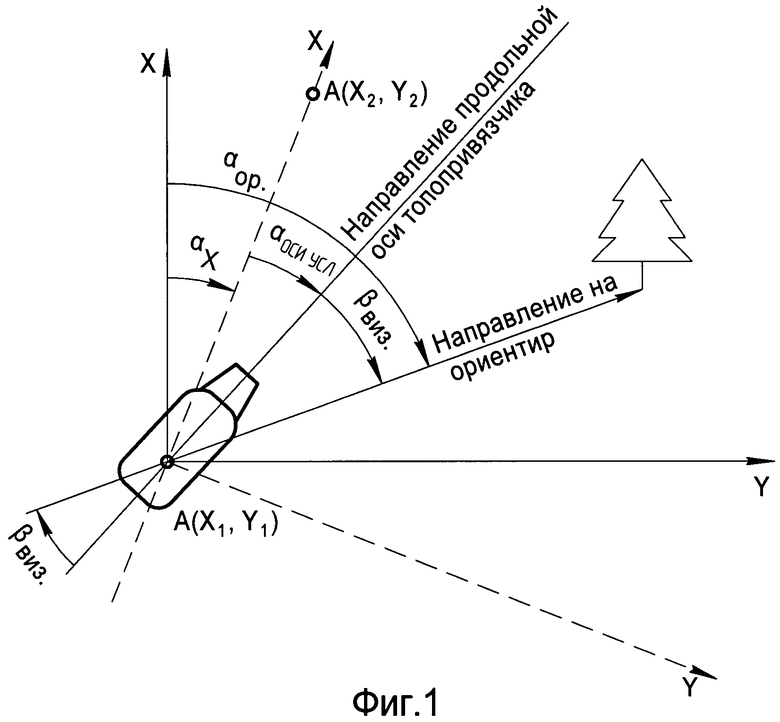
1. Способ согласования осей инерциальной навигационной системы с осью наземного транспортного средства, заключающийся в том, что на первоначальном этапе производятся регулировочные работы с визиром, определяется величина углового смещения оптической оси визира относительно продольной оси транспортного средства, далее производится выверка навигационной аппаратуры, определяется величина поправки дирекционного угла оси транспортного средства, определение величины поправки повторяется несколько раз с дальнейшим вычислением средней ошибки, отличающийся тем, что на первом этапе производятся регулировочные работы со штатным визиром транспортного средства (ТС), для чего ТС в поле допуска устанавливается на юстировочном участке, вывешивается на домкратах или иных подъемных устройствах, после чего горизонтируется установочная плита, на которой закреплен визир, а затем - собственно сам визир, далее выставляются нулевые отсчеты визира при наведении его на перекрестие юстировочной мишени, установленной таким образом, чтобы ее ось симметрии совпадала с вертикальной плоскостью, проходящей через ось симметрии юстировочного участка, а вертикальное положение было выставлено по отвесу, на втором этапе проводится горизонтирование установочной плиты под инерциальную навигационную систему (ИНС), на третьем этапе производится определение исходных значений «эталонных» углов: азимута Ах (дирекционного угла αх), продольной оси ТС и углов наклона ТС относительно горизонта (углов крена βк и тангажа γк) после установки ТС на контрольной точке (КТ), его поддомкрачивания с одновременным обеспечением видимости теодолитом удаленного ориентира и зеркала переходной плиты ИНС, с дальнейшим определением с помощью теодолита автоколлимационным способом угла Ат, (αт) между направлением на ориентир и нормалью юстировочного зеркала переходной плиты и вычислением азимута (дирекционного угла) на нормаль зеркала переходной плиты, который в дальнейшем принимается за «эталонное» значение исходного азимута (дирекционного угла) Аэ (αэ), определение с помощью приборов для измерения и установки углов наклона к горизонтальной плоскости, размещаемых на площадке переходной плиты, углов крена и тангажа, которые принимаются за «эталонные» значения βэ и γэ, на четвертом этапе производится включение и перевод ИНС в режим «Навигация», при котором определяются значения углов Агк (αгк), βгк, γгк, на пятом этапе производится вычисление исходных поправок на угловые показания ИНС для их ввода в бортовой программно-аппаратный комплекс ТС.
2. Способ согласования осей инерциальной навигационной системы с осью наземного транспортного средства по п.1, отличающийся тем, что после установки ТС на КТ, его поддомкрачивания «эталонные» углы Ах=Аэ, αх=αэ, βк=βэ, γк=γэ, определяются с использованием штатного визира ТС.
3. Измерительный комплекс, содержащий визир и навигационную аппаратуру контролируемого транспортного средства, контрольную точку маршрута (испытательной трассы) с известными координатами и азимутом (дирекционным углом) на удаленный на расстояние ориентир, отличающийся тем, что согласование осей ИНС с осью наземного ТС проводят на измерительном комплексе, включающем в себя следующие сооружения, измерительные и вспомогательные средства: юстировочный участок, оборудованный площадкой для ТС в закрытом помещении с твердым напольным покрытием, оснащенным разметкой, для установки ТС, выносной юстировочной мишенью с разметкой на ее поле, внешним источником электропитания для подключения аппаратуры ТС, домкратами или иными подъемными устройствами соответствующей грузоподъемности, приборами для измерения и установки углов наклона к горизонтальной плоскости, отвесом, угломерным измерительным прибором, испытательную трассу для оценки точности определения геодезических данных, оборудованную контрольными точками (КТ) с известным азимутом (дирекционным углом) на удаленный предмет (ориентир), представляющую собой физический предмет (металлический костыль, кол, камень и т.п.) или специальную метку на площадке, обеспечивающую прямую видимость на ориентир.
| Устройство для транспортирования рыбы из невода в лабаз | 1932 |
|
SU32262A1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ПЕРВИЧНОЙ УТИЛИЗАЦИИ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ НА МЕСТАХ ИХ ДИСЛОКАЦИИ | 2005 |
|
RU2309061C2 |
| Цифровой измеритель параметров движения | 1986 |
|
SU1476388A1 |
| Устройство для определения параметров положения объектов | 1984 |
|
SU1218406A1 |
| US 6765499 В2, 20.07.2004 | |||
| US 6816761 В2, 09.11.2004 | |||
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207262C1 |
| СПОСОБ ИНТЕРПОЛЯЦИИ ЗНАЧЕНИЙ ПОДПИКСЕЛОВ | 2002 |
|
RU2317654C2 |
| Станд для испытания стеклодувных формовочных приборов | 1933 |
|
SU39433A1 |

