Изобретение относится к подвижным объектам в виде внутритрубных инспектирующих снарядов, предназначенных для определения геодезических координат трассы подземных газо-нефтепроводов, а также для определения, совместно с коррозионными, ультразвуковыми и другими средствами дефектоскопии, угловых и декартовых координат аварийных участков трубопроводов с целью их последующего устранения.
Известен способ выставки осей подвижного объекта, который реализуется в навигационно-топографическом внутритрубном инспектирующем снаряде (НТВИС) [1], содержащем герметичный контейнер, эластичные манжеты в передней и задней частях контейнера, датчики пути (одометры), приборные узлы, закрепленные внутри контейнера, блок электроники для регистрации сигналов датчиков, аккумуляторные батареи и измерительный модуль в виде корпуса кубической формы. На внутренних гранях корпуса установлены три волоконно-оптических гироскопа и три акселерометра с ортогональной взаимной ориентацией осей чувствительности. Модуль закрыт пермаллоевым кожухом с толщиной, обеспечивающей снижение величины напряженности магнитного поля снаряда до минимально допустимых значений для этих датчиков. Одна грань корпуса перпендикулярна продольной оси снаряда. Корпус средствами крепления через упругодемпфирующие элементы, для определения коэффициентов передач которых приведена формула, соединен с контейнером. Средства крепления установлены на грани корпуса измерительного модуля, перпендикулярно продольной оси контейнера. Геометрический центр трех акселерометров совмещен с центром подвеса контейнера.
Недостатком способа выставки осей НТВИС, осуществляемого данным устройством, является неопределенность ориентировки осей волоконно-оптических гироскопов и акселерометров относительно осей подвижного объекта, т.е. герметичного контейнера, что снижает точность определения параметров ориентации и навигации.
Известен способ определения главных, в т. ч. центральных, осей инерции твердых тел, основанный на том, что тело подвешивают за некоторую его точку к струне, а затем струну вращают с помощью привода, закрепленного на верхнем фундаменте [2]. Струна увлекает во вращение твердое тело, и в зависимости от точки прикрепления струны к телу и расположения в нем главных (центральных) осей инерции устанавливаются положения равновесия тела. По ним с помощью измерительных приборов определяют направления главных (центральных) осей инерции этого твердого тела.
Недостатком данного способа является сложность его реализации в техническом и теоретическом аспектах, а также недостаточно высокая точность фиксации этих осей. Данный способ является сложным при алгоритмической технической реализации, его применяют к большим телам (летательные аппараты и им подобные), во много раз превышающим размеры и массу навигационно-топографического инспектирующего снаряда. Поэтому этот способ неприменим к выставке направлений объектовых осей НТВИС.
Известен способ выставки осей подвижного объекта, заключающийся в установке платформы в горизонтальное положение и измерении положения подвеса оптико-электронного прибора до совпадения его горизонтальной оси с осью имитатора внешнего ориентира, при этом устанавливают автоколлимационный теодолит за подвесом стенда, направляют его визирную ось на центр подвеса динамического моделирующего стенда и центр имитатора внешнего ориентира, в центре подвеса жестко закрепляют зеркальный элемент, по автоколлимационному изображению штриха теодолита устанавливают его в плоскости, перпендикулярной визирной оси подвеса динамического моделирующего стенда, жестко закрепляют котировочную сетку с узлом подсвета, между имитатором внешнего ориентира и юстировочной сеткой устанавливают микроскоп, поворачивают подвес динамического моделирующего стенда и фиксируют микроскопом отклонение перекрестия юстировочной сетки, определяя при этом совмещение центра перекрестия сетки с центром подвеса динамического моделирующего стенда, из поля зрения теодолита выводят микроскоп и узел подсвета, а между юстировочной сеткой и имитатором внешнего ориентира устанавливают зеркало, плоскость которого перпендикулярна визирной оси автоколлимационного теодолита, перед которым устанавливают оптический компенсатор, поворотом которого совмещают центр юстировочной сетки с центром визирной оси автоколлимационного теодолита, фиксируют угловое положение оптического компенсатора, выводят из поля зрения автоколлимационного теодолита юстировочную сетку и зеркало, а выставку оси подвеса динамического моделирующего стенда на имитатор внешнего ориентира осуществляют поворотами платформы стенда и перемещениями имитатора внешнего ориентира [3].
Данный способ принимается за наиболее близкий аналог изобретения.
Недостатком данного способа является то, что он обладает большой технической сложностью и трудоемкостью процесса определения горизонтальности и задания осей устройства, что определяется применением микроскопа, автоколлимационного теодолита, зеркала и других приборов наряду с используемым устройством.
Задачей данного изобретения является упрощение процесса и снижение трудоемкости способа выставки осей подвижного объекта.
Технический результат изобретения состоит в том, что упрощается конструкция устройства и упрощается, уменьшаясь в количестве, приборный состав при реализации способа выставки осей подвижного объекта.
Поставленная задача решается тем, что в способе выставки осей подвижного объекта, заключающемся в том, что на установочных поверхностях внутри контейнера закрепляют корпус бесплатформенного инерциального измерительного модуля с установленными на нем трехкомпонентным гироскопическим измерителем угловой скорости и трехкомпонентным измерителем кажущегося ускорения, в которых направления измерительных осей трех гироскопов и трех акселерометров определены на предмет определения углов  неперпендикулярности измерительных осей к установочным поверхностям корпуса бесплатформенного инерциального измерительного модуля, а также на предмет определения углов непараллельности между собой одноименных измерительных осей гироскопов и акселерометров
неперпендикулярности измерительных осей к установочным поверхностям корпуса бесплатформенного инерциального измерительного модуля, а также на предмет определения углов непараллельности между собой одноименных измерительных осей гироскопов и акселерометров  в соответствующих плоскостях, во введении компенсационных добавок
в соответствующих плоскостях, во введении компенсационных добавок  в сигналы гироскопов и акселерометров
в сигналы гироскопов и акселерометров  по алгоритмам:
по алгоритмам:








на контейнере до установки на нем навесного оборудования выделяют две цилиндрические поверхности вращения в носовой и хвостовой частях, затем этими поверхностями опирают контейнер на четыре колеса, имеющих возможность регулировки их по высоте в желобе, неподвижном относительно Земли, приводят в медленное вращение колеса, посредством которых контейнер разворачивается по крену и, контролируя сигналы двух акселерометров, измерительные оси которых направлены вдоль продольной и поперечной осей контейнера, находят угол крена, при котором сигналы акселерометров принимают минимальные значения, а затем с помощью регулировочных устройств на опорах, например, двух носовых колес, разворачивают продольную ось контейнера по углу тангажа до положения, при котором сигналы акселерометров с измерительными осями, направленными по продольной и поперечной осям контейнера, станут близкими к нулю, что соответствует состоянию горизонтирования установочных поверхностей кронштейна контейнера, а затем с помощью колес разворачивают контейнер в следующие четыре угловых фиксированных положения по углу крена:
а)γ=0°; б)γ=90°; с)γ=180°; d)γ=270°,
определяя эти углы по осредненным сигналам двух акселерометров  измерительные оси которых направлены по нормальной и поперечной осям контейнера, измеряя одновременно в каждом из четырех по углу у положений осредненные сигналы
измерительные оси которых направлены по нормальной и поперечной осям контейнера, измеряя одновременно в каждом из четырех по углу у положений осредненные сигналы  (k=a,b,c,d), акселерометра, измерительная ось которого направлена по продольной оси объекта, после чего по алгоритмам
(k=a,b,c,d), акселерометра, измерительная ось которого направлена по продольной оси объекта, после чего по алгоритмам
определяют оценки углов  отклонения продольной оси контейнера вокруг его продольной, нормальной и поперечной осей относительно установочной поверхности корпуса бесплатформенного инерциального измерительного модуля, где
отклонения продольной оси контейнера вокруг его продольной, нормальной и поперечной осей относительно установочной поверхности корпуса бесплатформенного инерциального измерительного модуля, где  - оценка ускорения силы тяжести в месте установки навигационно-топографического внутритрубного инспектирующего снаряда, при этом за горизонтальное положение поперечной оси контейнера принимается положение акселерометра с измерительной осью, направленной по поперечной оси контейнера, при котором сигнал этого акселерометра равен нулю с учетом компенсирующей добавки
- оценка ускорения силы тяжести в месте установки навигационно-топографического внутритрубного инспектирующего снаряда, при этом за горизонтальное положение поперечной оси контейнера принимается положение акселерометра с измерительной осью, направленной по поперечной оси контейнера, при котором сигнал этого акселерометра равен нулю с учетом компенсирующей добавки  , в оценки сигналов гироскопов и акселерометров
, в оценки сигналов гироскопов и акселерометров  вводят компенсационные добавки по следующим алгоритмам:
вводят компенсационные добавки по следующим алгоритмам:



где  - уточненные по углам перекосов αi оценки абсолютных угловых скоростей и кажущихся ускорений контейнера.
- уточненные по углам перекосов αi оценки абсолютных угловых скоростей и кажущихся ускорений контейнера.
В случае, когда подвижный объект имеет существенные поворотные ускорения, их влияние во многом устраняется путем введения компенсационных добавок, которые находят нижеследующим образом.
Способ выставки осей, жестко связанных с контейнером навигационно-топографического внутритрубного инспектирующего снаряда, состоит в том, что контейнер приводят во вращение с постоянной угловой скоростью  , измеряют осредненные сигналы гироскопа
, измеряют осредненные сигналы гироскопа  и акселерометров
и акселерометров  и по алгоритмам
и по алгоритмам
определяют оценки смещения геометрического центра трех акселерометров относительно центра подвеса контейнера и вводят компенсационные добавки
в сигналы нормального и поперечного акселерометров.
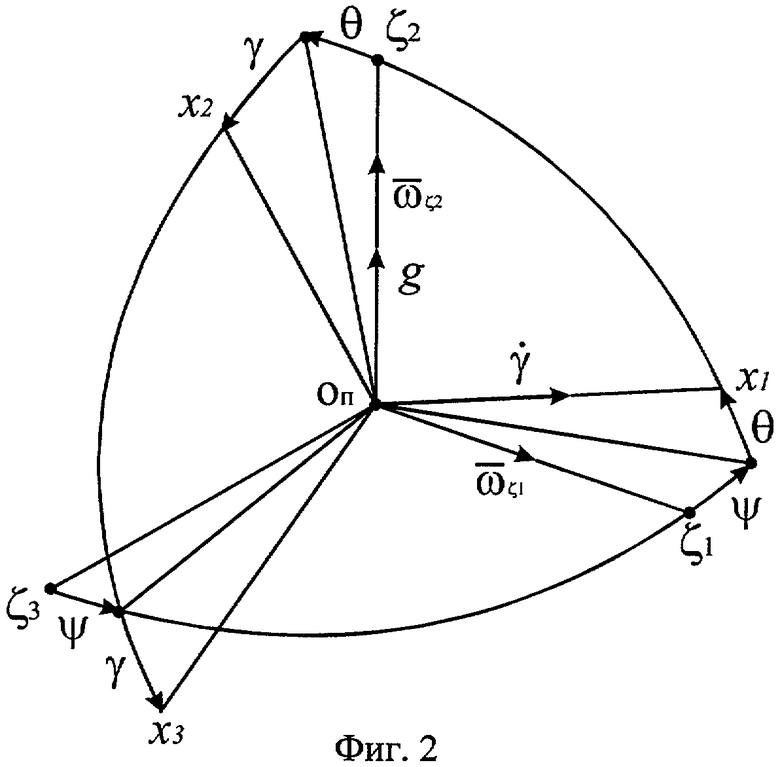
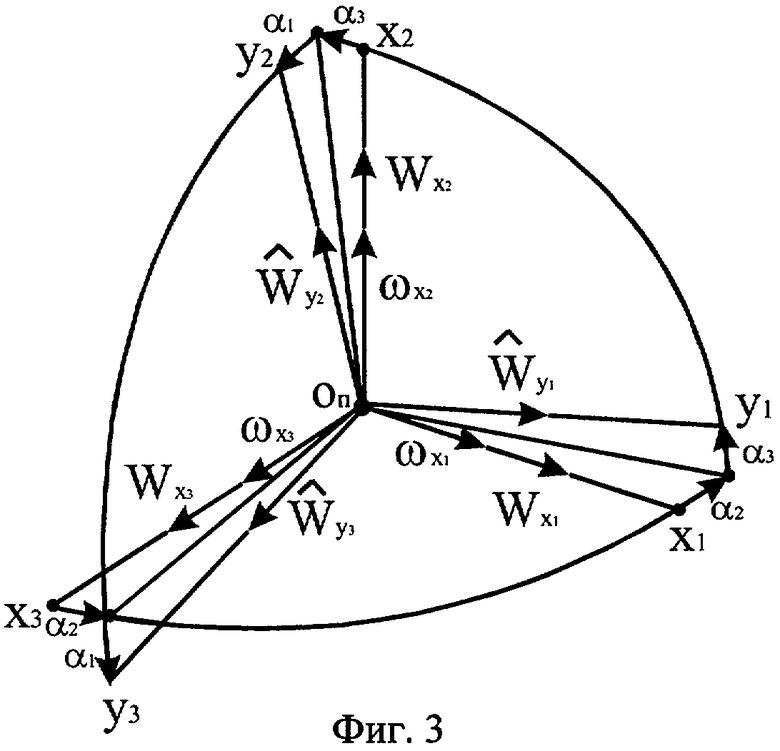
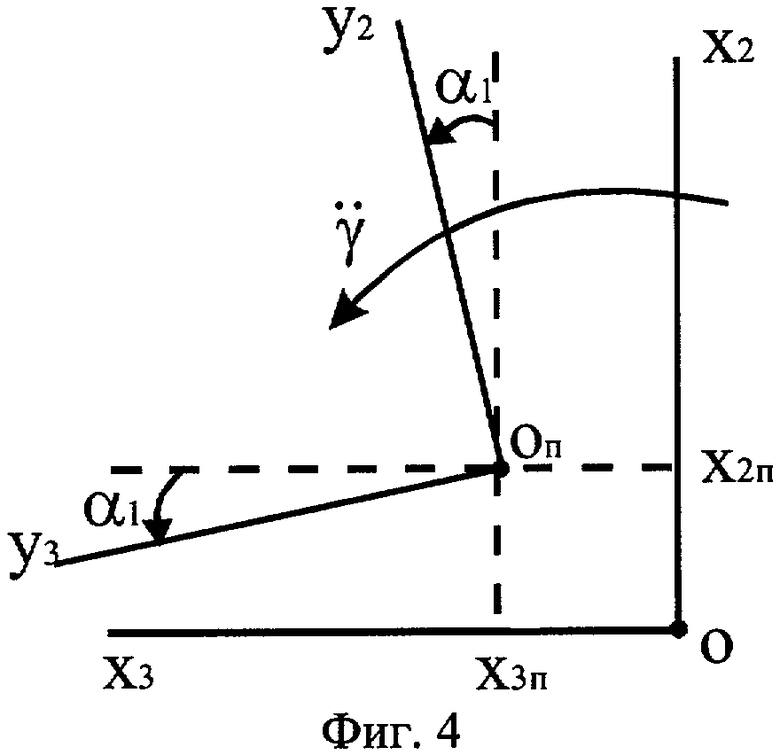
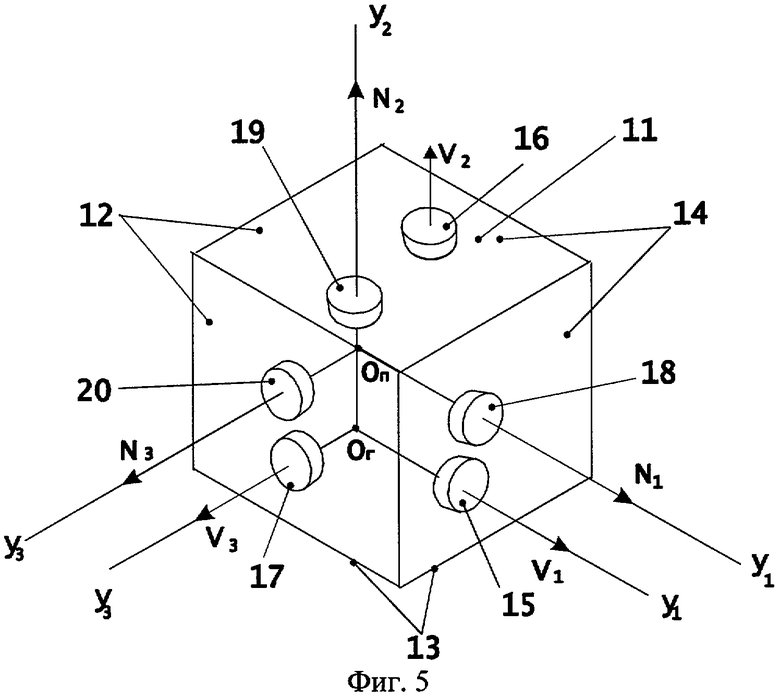
На фиг.1 изображена кинематическая схема НТВИС в желобе; на фиг.2 изображен поворот системы координат, связанной с контейнером 1, относительно географической системы координат Oζ1ζ2ζ3; на фиг.3 представлены повороты системы координат ОПy1y2y3 связанной с посадочными поверхностями 9, относительно системы координат Ох1х2х3, связанной с контейнером 1; на фиг.4 представлена плоская схема поворота и смещения системы координат (СК), связанной с корпусом БИИМ (ОПy1y2y3) или, что то же самое, с посадочными поверхностями 9, относительно системы координат Ох1х2x3, связанной с контейнером 1 НТВИС; на фиг.5 дано размещение ТГИУС и ТИКУ в бесплатформенном инерциальном измерительном модуле (БИИМ).
Ниже излагается пример на осуществление заявляемого способа.
За базовый элемент конструкции принимается контейнер 1 НТ ВИС, в нем за базовые поверхности принимаются цилиндрические части 2 и 3 по краям контейнера 1 - фиг.1 - до установки на нем навесного оборудования - одометров и других элементов. Контейнер 1 помещается в желоб 4 на укрепленные в нем колеса 5, 6. Эти колеса с помощью электродвигателей приводят во вращение контейнер 1 вокруг оси Oζ1 желоба 4 (вместо желоба может быть использовано металлическое основание).
Внутри контейнера 1 расположены направляющие 7, к которым жестко крепят установочный кронштейн 8 с установочными поверхностями 9, определяющими положение корпуса бесплатформенного инерциального измерительного модуля (БИИМ) (СК ОПy1y2y3) относительно контейнера 1 (СК Ох1x2x3). Положение системы координат (СК) Ох1х2x3 относительно СК Оζ1ζ2ζ3 связанной с желобом 4, задано углами курса, тангажа и крена ψ,θ,γ (фиг.2), а угловое положение СК ОПy1y2y3, относительно СК Ох1х2х3 - углами α1, α2, α3. Центр площадки ОП смещен относительно центра О подвеса (фиг.1, фиг.4) контейнера; номером 10 обозначен корпус желоба (Земля). Нужно определить углы α1, α2, α3 (фиг.4).
На фиг.5 изображена кинематическая схема БИИМ, состоящего из корпуса 11 с опорными гранями 12, 13 и 14, соприкасающимися с опорными поверхностями 9. На трех других гранях установлены три однокомпонентных гироскопических измерителя угловой скорости (ТГИУС) 15, 16 и 17 (например, волоконно-оптические гироскопы), они составляют ТГИУС. Их измерительные оси обозначены через V1, V2, V3, которые пересекаются в точке ОГ системы координат ОГy1y2y3. На этих же гранях установлены три измерителя кажущихся ускорений (ТИКУ) на основе, например, кварцевых акселерометров 18, 19 и 20 с измерительными осями N1, N2 и N3 соответственно. Эти оси пересекаются в точке ОП, являющейся центром ТИКУ и системы координат Опy1y2y3. Нужно также определить координаты вектора  , т.к. смещение акселерометров относительно центра подвеса О НТВИС приводит к возникновению в них погрешностей; ОГ - центр ТГИУС (фиг.5). В случае, когда определяются углы
, т.к. смещение акселерометров относительно центра подвеса О НТВИС приводит к возникновению в них погрешностей; ОГ - центр ТГИУС (фиг.5). В случае, когда определяются углы  , на установочные поверхности 9 устанавливают БИИМ, подлежащий к использованию в данном НТВИС. Он должен быть откалиброван по углам установки измерительных осей ТГИУС и ТИКУ, т.е. должны быть определены углы их неперпендикулярности относительно своего кронштейна (корпуса) и непараллельности между собой. БИИМ включается, и контейнер 1 приводится во вращение вокруг оси оζ1 с угловой скоростью ωх1=const в следующем диапазоне угловых скоростей:
, на установочные поверхности 9 устанавливают БИИМ, подлежащий к использованию в данном НТВИС. Он должен быть откалиброван по углам установки измерительных осей ТГИУС и ТИКУ, т.е. должны быть определены углы их неперпендикулярности относительно своего кронштейна (корпуса) и непараллельности между собой. БИИМ включается, и контейнер 1 приводится во вращение вокруг оси оζ1 с угловой скоростью ωх1=const в следующем диапазоне угловых скоростей:

где  абсолютное значение верхнего предела измерения ГИУС-1.
абсолютное значение верхнего предела измерения ГИУС-1.
В начале испытаний БИИМ производят оценку нулевых сигналов ТГИУС и ТИКУ в составе БИИМ при γ≡0. Запись сигналов ТГИУС и ТИКУ производят в течение 50-60 с. БИИМ устанавливают в горизонтальное положение на кронштейне 8 в установочных поверхностях 9. Повторяют измерения 3-4 раза. При обработке информации сигналы гироскопов и акселерометров осредняют по формулам:

где i - номер измерительной оси ГИУС и ИКУ; k - номер дискретного измерения; n - количество точек в одной 50-60 секундной записи процесса;  - k-е оценки угловых скоростей и кажущихся ускорений;
- k-е оценки угловых скоростей и кажущихся ускорений;  - осредненные значения указанных оценок нулевого сигнала.
- осредненные значения указанных оценок нулевого сигнала.
Затем запускают электропривод и задают повороты контейнеру 1. Т.к. ось ох1 отклонена от плоскости горизонта и от направления на север, то угловые скорости и кажущиеся ускорения в контейнере описываются формулами:



При малых углах курса и тангажа ψ и θ с учетом поворота по γ (крену) имеем:
Оценки  проекций угловых скоростей контейнера на оси системы координат
проекций угловых скоростей контейнера на оси системы координат  с учетом введения компенсационных добавок, вызванных углами βs i измерительных осей к установочным поверхностям 9, определяют по формулам (фиг.2, 3, 4) (
с учетом введения компенсационных добавок, вызванных углами βs i измерительных осей к установочным поверхностям 9, определяют по формулам (фиг.2, 3, 4) ( - сигналы ТГИУС):
- сигналы ТГИУС):
где  - оценка соответствующего угла, где i - номер оси; s - номер гироскопа;
- оценка соответствующего угла, где i - номер оси; s - номер гироскопа;  - угловые скорости дрейфов ТГИУС по соответствующим осям;
- угловые скорости дрейфов ТГИУС по соответствующим осям;  - сигнал i-го гироскопа.
- сигнал i-го гироскопа.
Оценки  проекций кажущегося ускорения, т.е. ускорения силы тяжести, на оси ОПyi
проекций кажущегося ускорения, т.е. ускорения силы тяжести, на оси ОПyi с учетом компенсационных добавок dWyi и сдвигов нулей ΔWyi, акселерометров определяются формулами (фиг.2, 3, 4):
с учетом компенсационных добавок dWyi и сдвигов нулей ΔWyi, акселерометров определяются формулами (фиг.2, 3, 4):
где  - оценка угла неперпендикулярности измерительной оси s-го акселерометра вокруг i-ой оси;
- оценка угла неперпендикулярности измерительной оси s-го акселерометра вокруг i-ой оси;  - сигнал ТИКУ по i-ой измерительной оси. Углы
- сигнал ТИКУ по i-ой измерительной оси. Углы  и
и  калибруются БИИМ и являются известными.
калибруются БИИМ и являются известными.
Введение компенсационных добавок dωyi и  при
при  ;
;  приводит к компенсации погрешностей, содержащих сомножителями данные углы, так что имеем:
приводит к компенсации погрешностей, содержащих сомножителями данные углы, так что имеем:
Здесь WП x2, WП x3 - компоненты поворотного ускорения, возникающего за счет смещения точки ОП относительно О (фиг.1):

где х2П, х3П - компоненты радиуса-вектора смещения;  - орты соответствующих осей.
- орты соответствующих осей.


Для постоянных угловых скоростей  имеем:
имеем:

Нетрудно видеть, что в выходные сигналы WП y2, WП y3 входят погрешности, вызванные поворотными ускорениями WП x2, WП x3. С целью повышения точности выставки осей подвижного объекта влияние этих погрешностей значительно снижается путем введения компенсационных добавок, которые ниже вводятся в сигналы WП y2, WП y3 - формулы (12), (13).
После этого для оценок  кажущихся ускорений с учетом (3) имеем следующие формулы:
кажущихся ускорений с учетом (3) имеем следующие формулы:

Формулы (8) являются исходными для определения оценок углов  неточной установки поверхностей 9 кронштейна 8 относительно контейнера 1 и координат х2П и х3П. В состав углов αi входят как углы неточной ориентировки установочных поверхностей 9 относительно контейнера 1, так и углы неточной установки контейнера относительно желоба 4. Для определения этих углов производят повороты контейнера 1 на фиксированные углы γ, придавая им значения, при которых ряд членов обращается в 0, и тогда можно определять искомые углы αi. Рассмотрим процедуру исключения постоянных составляющих сдвигов нулей акселерометров из их показаний, при которой контейнер разворачивают на следующие по углу γ фиксированные положения:
неточной установки поверхностей 9 кронштейна 8 относительно контейнера 1 и координат х2П и х3П. В состав углов αi входят как углы неточной ориентировки установочных поверхностей 9 относительно контейнера 1, так и углы неточной установки контейнера относительно желоба 4. Для определения этих углов производят повороты контейнера 1 на фиксированные углы γ, придавая им значения, при которых ряд членов обращается в 0, и тогда можно определять искомые углы αi. Рассмотрим процедуру исключения постоянных составляющих сдвигов нулей акселерометров из их показаний, при которой контейнер разворачивают на следующие по углу γ фиксированные положения:

В каждом из этих фиксированных положений производят измерение, осреднение, а затем вычитание сигналов акселерометров, измерительная ось одного из них направлена по продольной оси контейнера; а второго - по нормальной оси:
В формулы (10) следует подставлять осредненные значения сигналов акселерометра. Имеем следующие алгоритмы для определения оценок углов  :
:
Задание угла γ может производиться не только с помощью электродвигателей по одному на каждое колесо 5 и 6, но и от одного электродвигателя через редуктор к двум колесам. Кроме того, может производиться разворот и вручную. Главное, что начальное положение по углу γ=0° контейнера должно быть задано от плоскости горизонта. За горизонтальное положение поперечной оси контейнера 1, а значит, НТВИС, принимается положение акселерометра с измерительной осью, направленной по поперечной оси контейнера, при котором сигнал этого акселерометра равен нулю, когда к сигналу его вводится добавка в этом положении, равная 
Для определения координат х2П, х3П вектора  задают постоянные угловые скорости
задают постоянные угловые скорости  , причем
, причем

Например,  . Тогда из соотношений (8) получаем, пренебрегая малыми членами:
. Тогда из соотношений (8) получаем, пренебрегая малыми членами:

Измеряют  - по акселерометрам 19 и 20 (фиг.4) и гироскопу 15 соответственно. Т.к. оценки
- по акселерометрам 19 и 20 (фиг.4) и гироскопу 15 соответственно. Т.к. оценки  и
и  известны, то из (12) определяют оценки
известны, то из (12) определяют оценки  алгоритмам:
алгоритмам:
где  .
.
С учетом алгоритмов (11)и(13) компенсируются погрешности ТГИУС и ТИКУ по следующим алгоритмам:

Преимущество изобретения состоит в том, что при выполнении точных оценок  при использовании алгоритмов (4), (5), (11), (13) и (14) выходная информация ТГИУС и ТИКУ не будет содержать погрешностей перекрестных связей и от поворотных ускорений, в связи с чем их сигналы достаточно точно будут определяться формулами:
при использовании алгоритмов (4), (5), (11), (13) и (14) выходная информация ТГИУС и ТИКУ не будет содержать погрешностей перекрестных связей и от поворотных ускорений, в связи с чем их сигналы достаточно точно будут определяться формулами:

За счет этого погрешности ТИКУ и ТГИУС будут снижены в 2-2,5 раза. Нетрудно видеть, что перекосы измерительных осей гироскопов и акселерометров после этого практически не влияют на их показания, т.е. оси, жестко связанные с контейнером 1, выставлены с достаточной точностью.
Источники информации
1. Патент РФ №2207512, МПК G01С 21/12, F17D 5/06, G01N 27/83. Навигационно-топографический внутритрубный инспектирующий снаряд, Авторы А.И.Синев, П.К.Плотников, А.П.Рамзаев, В.Б.Никишин, 2003 г., Б. №18.
2. Ишлинский А.Ю., Стороженко В.А., Темченко М.Е. Вращение твердого тела на струне и смежные задачи. - М.: Наука, 1991. - 331 с.
3. АС СССР №1612716. МПК G01М 11/00. Способ выставки осей подвеса динамического моделирующего стенда, Автор А.Н.Гормаков, БИ 1991, №14.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ СМЕЩЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2206871C2 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2002 |
|
RU2207512C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
| Способ измерения радиусов изгиба трубопровода на основе данных диагностического комплекса для определения положения трубопровода | 2017 |
|
RU2655614C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СМЕЩЕНИЙ ОСЕВОЙ ЛИНИИ ТРУБОПРОВОДА | 2016 |
|
RU2621219C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| СПОСОБ КАЛИБРОВКИ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ ПО КАНАЛУ АКСЕЛЕРОМЕТРОВ | 2011 |
|
RU2477864C1 |
Изобретение относится к области внутритрубных инспектирующих снарядов, предназначенных для автономного определения геодезических координат трассы подземных газо- и нефтепроводов. Способ выставки осей, жестко связанных с контейнером навигационно-топографического внутритрубного инспектирующего снаряда, заключается в том, что на установочных поверхностях внутри контейнера закрепляют корпус бесплатформенного инерциального измерительного модуля с установленными на нем трехкомпонентным гироскопическим измерителем угловой скорости и трехкомпонентным измерителем кажущегося ускорения, в которых положения измерительных осей трех гироскопов и трех акселерометров откалиброваны на предмет определения углов неперпендикулярности измерительных осей к установочным поверхностям корпуса бесплатформенного инерциального измерительного модуля, а также на предмет определения углов непараллельности между собой измерительных осей трех гироскопов и одноименных измерительных осей трех акселерометров. На контейнере выделяют две цилиндрические поверхности вращения, которыми опирают контейнер на четыре колеса, и приводят колеса в медленное вращение. Находят угол крена, при котором сигналы акселерометров принимают минимальные значения, а затем разворачивают продольную ось контейнера по углу тангажа до положения, при котором сигналы акселерометров с измерительными осями, направленными по продольной и поперечной осям контейнера, станут близкими к нулю, что соответствует состоянию горизонтирования установочных поверхностей кронштейна контейнера, а затем с помощью колес разворачивают контейнер в следующие четыре угловые фиксированные положения по углу крена, определяя эти углы по осредненным сигналам двух акселерометров, и определяют оценки углов отклонения продольной оси контейнера вокруг его продольной, нормальной и поперечной осей относительно установочной поверхности корпуса бесплатформенного инерциального измерительного модуля. 1 з.п. ф-лы, 5 ил.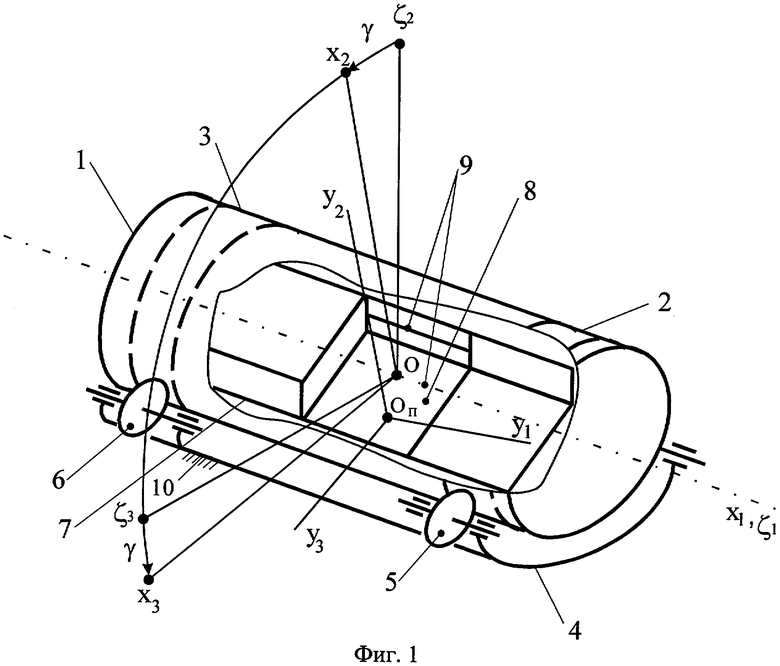
 неперпендикулярности измерительных осей к установочным поверхностям корпуса бесплатформенного инерциального измерительного модуля, а также на предмет определения углов непараллельности между собой измерительных осей трех гироскопов и одноименных измерительных осей трех акселерометров
неперпендикулярности измерительных осей к установочным поверхностям корпуса бесплатформенного инерциального измерительного модуля, а также на предмет определения углов непараллельности между собой измерительных осей трех гироскопов и одноименных измерительных осей трех акселерометров  в соответствующих плоскостях, вводят компенсационные добавки
в соответствующих плоскостях, вводят компенсационные добавки  в сигналы гироскопов и акселерометров
в сигналы гироскопов и акселерометров  по алгоритмам
по алгоритмам




на контейнере до установки на нем навесного оборудования выделяют две цилиндрические поверхности вращения в носовой и хвостовой частях, затем этими поверхностями опирают контейнер на четыре колеса, имеющие возможность регулировки их по высоте в желобе, неподвижном относительно Земли, приводят в медленное вращение колеса, посредством которых контейнер разворачивается по крену и, контролируя сигналы двух акселерометров, измерительные оси которых направлены вдоль продольной и поперечной осей контейнера, находят угол крена, при котором сигналы акселерометров принимают минимальные значения, а затем с помощью регулировочных устройств на опорах, например, двух носовых колес, разворачивают продольную ось контейнера по углу тангажа до положения, при котором сигналы акселерометров с измерительными осями, направленными по продольной и поперечной осям контейнера, станут близкими к нулю, что соответствует состоянию горизонтирования установочных поверхностей кронштейна контейнера, а затем с помощью колес разворачивают контейнер в следующие четыре угловых фиксированных положения по углу крена:
а)γ=0°; б)γ=90°; с)γ=180°; d)γ=270°,
определяя эти углы по осредненным сигналам двух акселерометров  измерительные оси которых направлены по нормальной и поперечной осям контейнера, измеряя одновременно в каждом из четырех по углу γ положений осредненные сигналы
измерительные оси которых направлены по нормальной и поперечной осям контейнера, измеряя одновременно в каждом из четырех по углу γ положений осредненные сигналы  (k=a, b, с, d), акселерометра, измерительная ось которого направлена по продольной оси объекта, после чего по алгоритмам
(k=a, b, с, d), акселерометра, измерительная ось которого направлена по продольной оси объекта, после чего по алгоритмам
определяют оценки углов  отклонений продольной оси контейнера вокруг его продольной, нормальной и поперечной осей относительно установочной поверхности корпуса бесплатформенного инерциального измерительного модуля, где
отклонений продольной оси контейнера вокруг его продольной, нормальной и поперечной осей относительно установочной поверхности корпуса бесплатформенного инерциального измерительного модуля, где  - оценка ускорения силы тяжести в месте установки навигационно-топографического внутритрубного инспектирующего снаряда, при этом за горизонтальное положение поперечной оси контейнера принимается положение акселерометра с измерительной осью, направленной по поперечной оси контейнера, при котором сигнал этого акселерометра равен нулю с учетом компенсирующей добавки
- оценка ускорения силы тяжести в месте установки навигационно-топографического внутритрубного инспектирующего снаряда, при этом за горизонтальное положение поперечной оси контейнера принимается положение акселерометра с измерительной осью, направленной по поперечной оси контейнера, при котором сигнал этого акселерометра равен нулю с учетом компенсирующей добавки  в оценки сигналов гироскопов и акселерометров
в оценки сигналов гироскопов и акселерометров  вводят компенсационные добавки по следующим алгоритмам:
вводят компенсационные добавки по следующим алгоритмам:



где  - уточненные по углам перекосов αi оценки абсолютных угловых скоростей и кажущихся ускорений контейнера.
- уточненные по углам перекосов αi оценки абсолютных угловых скоростей и кажущихся ускорений контейнера.
 измеряют осредненные сигналы гироскопа
измеряют осредненные сигналы гироскопа  и нормального и поперечного акселерометров
и нормального и поперечного акселерометров  по алгоритмам
по алгоритмам
определяют оценки смещения геометрического центра трех акселерометров относительно центра подвеса контейнера и вводят компенсационные добавки

в сигналы  нормального и поперечного акселерометров.
нормального и поперечного акселерометров.
| SU 1612716 A1, 27.02.2000 | |||
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2002 |
|
RU2207512C1 |
| САМООРИЕНТИРУЮЩИЙСЯ В АЗИМУТЕ ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2123664C1 |
| ЕР 0884202 А2, 16.12.1998 | |||
| JP 2000180171 А, 30.06.2000. | |||

