ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Согласно 119(е) раздела 35 Кодекса законов США по этой заявке испрашивается приоритет предварительной заявки №62/242142 на патент США, поданной 15 октября 2015 года, под названием «Dynamically controlled foil systems and methodsʺ, которая полностью включена в эту заявку путем ссылки.
УРОВЕНЬ ТЕХНИКИ
Это раскрытие относится к динамически управляемым крыльевым системам и к способам управления такими системами. Притязания включают в себя, но без ограничения ими, динамически управляемые крыльевые и гидрокрыльевые системы, выполненные с возможностью расположения сейсмических источников и других элементов морской сейсмической установки и поддержания расстояния между ними.
Как описано в публикации №2014/0247691 патента США, которая полностью включена в эту заявку путем ссылки, сейсмические группы с источниками и буксируемыми косами используют при исследовании пластов породы ниже земной поверхности. Одно или несколько морских судов обычно используют для буксирования источника и/или групп приемников, чтобы получать соответствующие геологические данные, охватывающие заданную площадь поверхности морского дна. Например, одно надводное судно может одновременно буксировать как группу источников, так и группу сейсмических буксируемых кос, или различные суда можно использовать для раздельного буксирования групп источников и приемников. В ином случае буксируемая группа источников может использоваться в сочетании со стационарными приемниками, например, с группой узлов на морском дне или с морскими донными кабелями, размещенными на дне моря.
Во время работы акустические ударные волны, создаваемые группой источников, распространяются в воде, проникают сквозь морское дно и отражаются от подземных структур. Отраженные акустические волны регистрируются как сигналы или сейсмические отклики на приемниках, например на гидрофонах и/или геофонах, буксируемых позади судна или размещенных на морском дне.
Для поддержания положения и разнесения сейсмических источников и других элементов группы при буксировании позади судна используют поперечные силы. Разнесение зависит от количества размещенных источников и/или буксируемых кос и от расстояния между компонентами соседних источников и/или приемников. Обычно некоторое количество подгрупп или связок источников размещают позади судна при использовании конфигурации буксирного троса, обеспечивающей разнесение источников в поперечном направлении на расстояния от приблизительно десяти до ста метров или на большие. Буксируемые косы обычно размещают с намного большим разнесением в поперечном направлении, например, на расстояниях от одной сотни метров до километра или на больших, и они могут тянуться на продолжении нескольких километров позади буксирующего судна.
Разнесение в поперечном направлении можно получать при развертывании паравана или отклоняющего устройства на специально предназначенной для этого системе буксирных тросов при использовании распорки или набора отдельных привязных тросов для обеспечения заданного разнесения между соседними буксируемыми косами. Кроме того, можно располагать позиционирующие устройства вдоль каждой буксируемой косы, чтобы поддерживать глубину и/или боковое смещение по длине косы.
Обычно параваны, створки, отклонители и подобные инженерные решения для управления направлением движения, приводят к возрастанию сил лобового сопротивления, и требуется значительная площадь палубы во время хранения, спуска на воду и извлечения. Кроме того, характеристика управления направлением движения может ограничиться не только работающей системой отклонителя, но также сложными природными условиями или дополнительными буксирными тросами, оттяжками и другими необходимыми элементами. В результате сохраняется необходимость в системах управления положением для обеспечения улучшенного динамического управления при меньшем лобовом сопротивлении и без других ограничений, существующих в предшествующем уровне техники.
Информация, включенная в этот раздел описания, относящийся к уровню техники, включающая любые упомянутые источники и любое описание или рассмотрение их, включена только для справки и не должна рассматриваться как объект, которым должен ограничиваться объем изобретения, определенный в формуле изобретения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Эти заявка относится к сейсморазведке и к крыльевым системам для установок с источниками и приемниками, предназначенных для сбора сейсмических данных, и способам управления таковыми. Например, крыльевые системы могут применяться в установке для управления положением сейсмических источников, подгрупп и/или буксируемых кос и поддержания расстояния между ними во время сейсмических исследований, например, в группе источников, буксируемых позади судна, или в буксируемой морской сейсмической установке. Кроме того, заявка относится к крыльевым системам для развертывания морских донных кабелей, например, развертывания двух или многочисленных морских донных кабелей при использовании подводных салазок или буксируемого объекта с динамически управляемой крыльевой системой для обеспечения поперечного перемещения, подъема/спуска или того и другого.
Согласно одному осуществлению установка включает в себя устройство с положительной плавучестью, пару кабелей управления, множество секций подводного крыла и исполнительный механизм. Пара кабелей управления может быть прикреплена к плавучему устройству и продолжаться вниз от плавучего устройства до погруженного конца. Множество секций подводного крыла могут быть расположены по направлению кабелей управления между плавучим устройством и погруженным концом. Исполнительный механизм может быть выполнен с возможностью регулирования углов атаки секций подводного крыла путем изменения натяжения одного или обоих кабелей управления.
Согласно другому осуществлению система включает в себя надводное или подводное плавучее устройство, передний кабель управления, задний кабель управления, исполнительный механизм и множество секций подводного крыла. Передний кабель управления может быть соединен с плавучим устройством и продолжаться ниже него. Задний кабель управления также может быть соединен с плавучим устройством и продолжаться ниже него. Исполнительный механизм может быть установлен на плавучем устройстве. Исполнительный механизм может быть выполнен с возможностью регулирования натяжения заднего кабеля управления относительно переднего кабеля управления. Множество секций подводного крыла могут быть расположены по направлению переднего и заднего кабелей управления. Секции подводного крыла могут быть выполнены с возможностью создания подъемной силы на основании углов атаки их. Углы атаки секций подводного крыла могут изменяться как функция натяжения.
Согласно еще одному осуществлению сейсмическая установка включает в себя множество буксируемых сейсмических источников и множество динамически управляемых рулевых систем, прикрепленных к каждому из сейсмических источников, соответственно. Каждая рулевая система может включать в себя устройство с положительной плавучестью, пару кабелей управления, множество секций подводного крыла и исполнительный механизм. Пара кабелей управления может быть прикреплена к плавучему устройству и продолжаться вниз от плавучего устройства до погруженного конца. Множество секций плавучего крыла могут быть расположены по направлению кабелей управления между плавучим устройством и погруженным концом. Исполнительный механизм может быть выполнен с возможностью регулирования углов атаки секций подводного крыла путем изменения натяжения одного или обоих кабелей управления.
Согласно дальнейшему осуществлению раскрыт способ управления сейсмической установкой. Сейсмическая установка может включать в себя множество буксируемых сейсмических устройств и множество динамически управляемых рулевых систем, прикрепленных к каждому из сейсмических источников, соответственно. Каждое рулевое устройство может включать в себя устройство с положительной плавучестью, передний кабель управления, задний кабель управления, множество секций подводного крыла, исполнительный механизм и контроллер подводного крыла. Передний кабель управления может быть соединен с плавучим устройством и продолжаться ниже него. Задний кабель управления также может быть соединен с плавучим устройством и продолжаться ниже него. Множество секций подводного крыла могут быть расположены по направлению переднего и заднего кабелей управления. Исполнительный механизм может быть установлен на плавучем устройстве. Исполнительный механизм может быть выполнен с возможностью регулирования углов атаки секций подводного крыла путем изменения натяжения одного или обоих кабелей управления. Контроллер подводного крыла может быть сконфигурирован для выдачи указания исполнительному механизму на регулирование натяжения любого из двух или обоих кабелей управления и тем самым на регулирование подъемной силы, создаваемой множеством секций подводного крыла. Способ может включать в себя передачу данных от контроллера подводного крыла к одной или нескольким рулевым системам, чтобы конкретизировать режим соответствующего исполнительного механизма. Кроме того, исполнительный механизм можно побуждать к регулированию натяжения заднего кабеля управления относительно переднего кабеля управления, чтобы создавать подъемную силу для управления соответствующим плавучим устройством и прикрепленным сейсмическим источником.
Этот раздел «Сущность изобретения» предназначен для ознакомления с выбором концепций в упрощенной форме, которые затем описываются ниже в разделе «Подробное описание». Этот раздел «Сущность изобретения» не предназначен для идентификации ключевых признаков или существенных признаков заявленного объекта изобретения, он не должен использоваться для ограничения заявленного объекта изобретения. Более развернутое представление признаков, деталей, свойств и преимуществ настоящего изобретения, определенного в формуле изобретения, дано в нижеследующем описании различных вариантов осуществления изобретения и показано на сопровождающих чертежах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
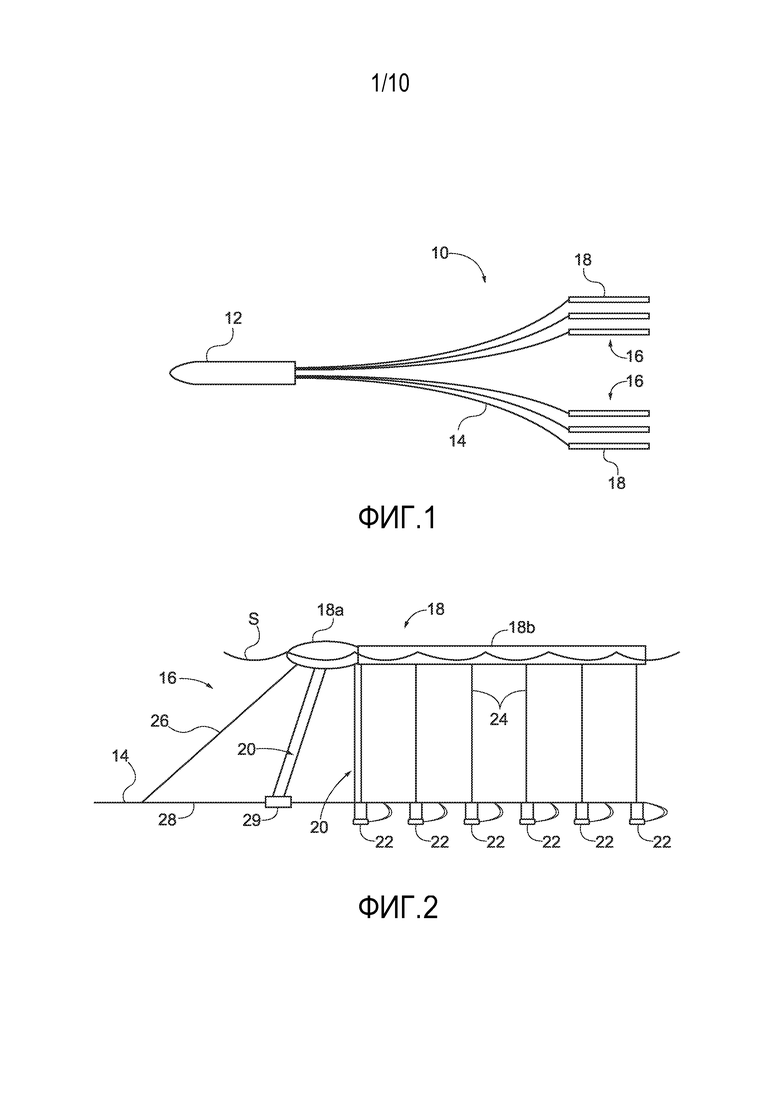
фиг. 1 - схематичный вид буксируемой группы источников с использованием динамически управляемой системы для удержания в заданном положении;
фиг. 2 - схематичный вид сбоку группы источников, иллюстрирующий типичную конфигурацию крыльевой системы;
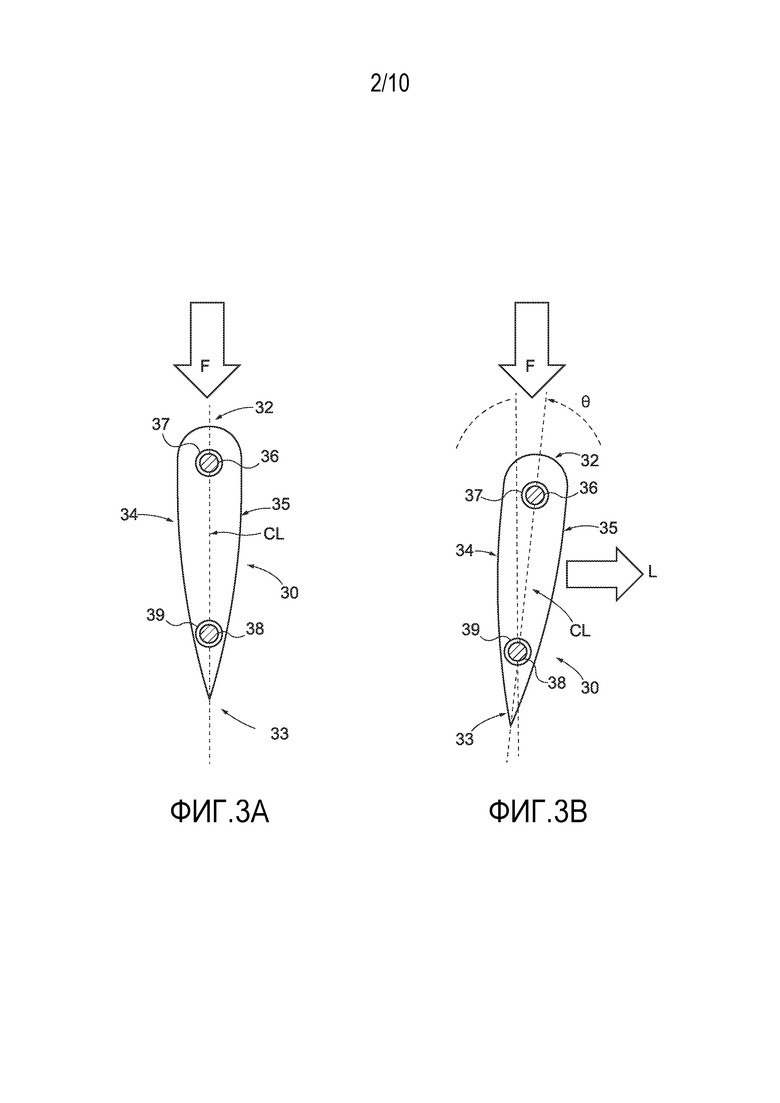
фиг. 3А - поперечное сечение сегмента подводного крыла для крыльевой системы из фиг. 1 и 2;
фиг. 3В - альтернативный вид сегмента подводного крыла, иллюстрирующий угол атаки;
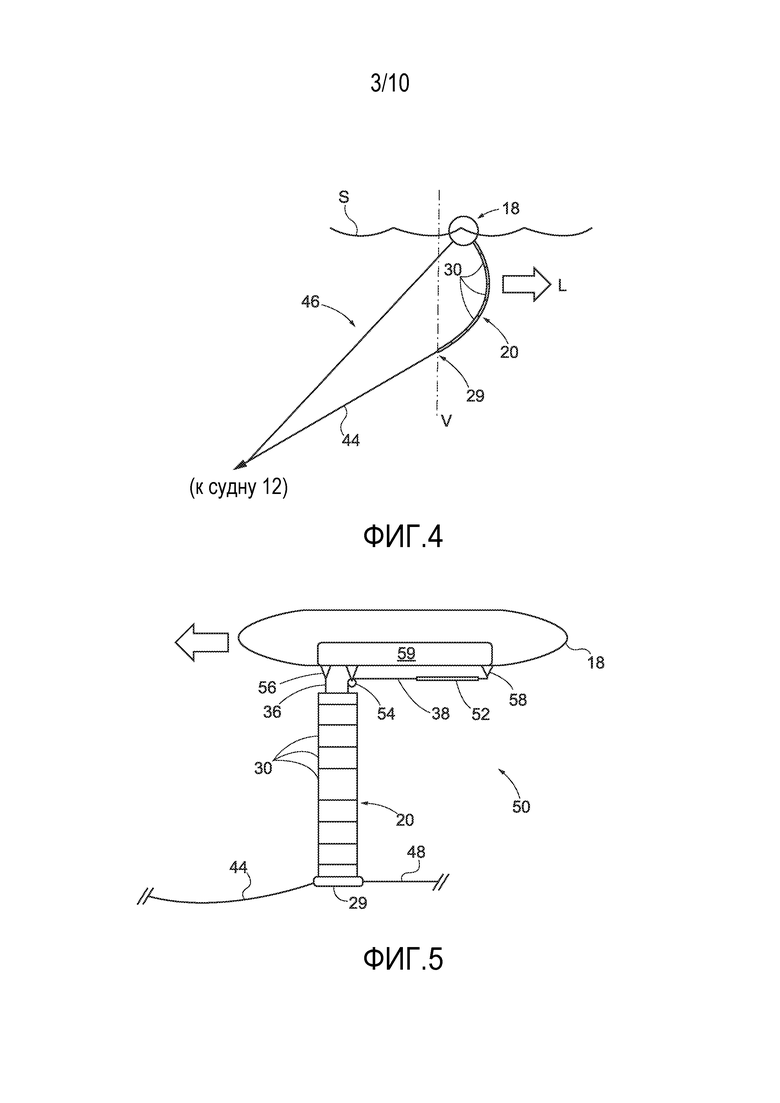
фиг. 4 - схематичный вид крыльевой системы, иллюстрирующий действие подъемной силы;
фиг. 5 - схематичный вид регулировочного механизма кабеля для крыльевой системы;
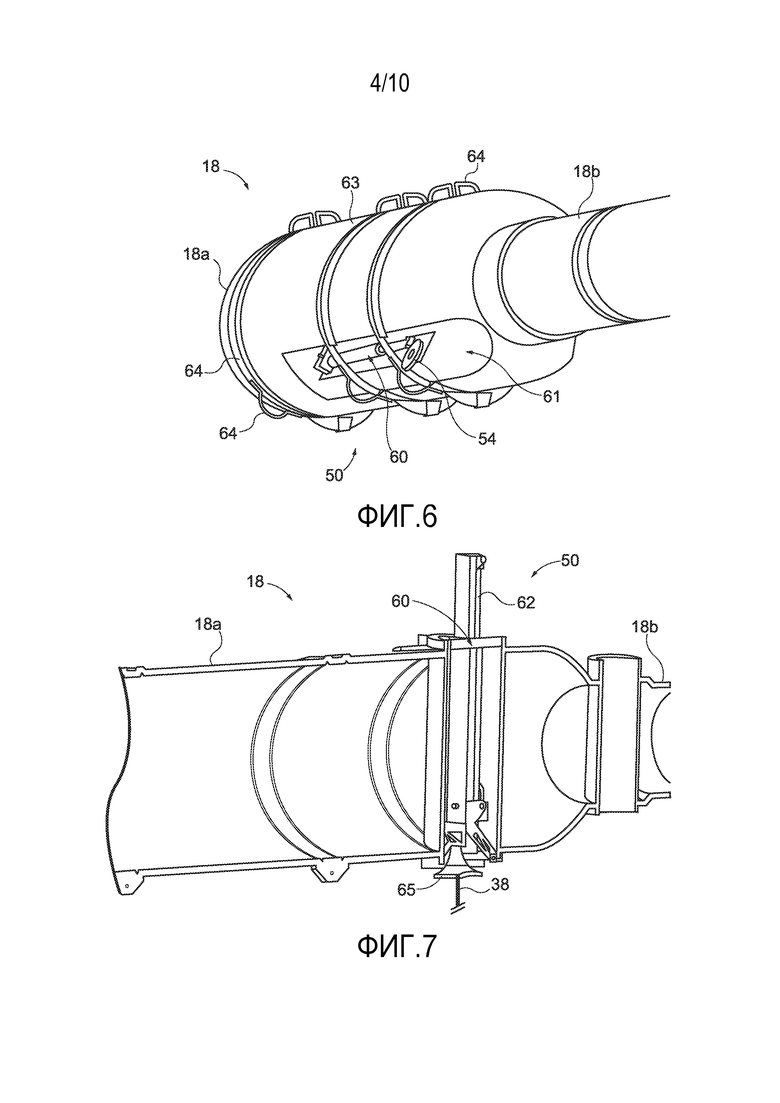
фиг. 6 - изометрический вид регулировочного механизма кабеля во внешней горизонтальной установочной конфигурации;
фиг. 7 - местный вид регулировочного механизма кабеля во внутренней вертикальной установочной конфигурации;
фиг. 8 - схематичный вид типичной буксируемой сейсмической установки с использованием одной или нескольких динамически управляемых крыльевых систем для удержания в заданных положениях компонентов источников и/или буксируемых кос;
фиг. 9А - поперечное сечение типичного плавучего устройства с внутренним вертикально ориентированным регулировочным механизмом кабеля;
фиг. 9В и 9С - виды сбоку и сверху, соответственно, плавучего устройства из фиг. 9А с показом регулировочного механизма кабеля;
фиг. 10A-10D - виды спереди, сбоку, в изометрии и снизу исполнительного механизма для регулировочного механизма кабеля из фиг. 9А-9С;
фиг. 11A-11D - виды типичных конфигураций источников для различных режимов работы динамически управляемой крыльевой системы;
фиг. 12 - схематичный вид динамически управляемой крыльевой системы, применяемой при развертывании подводных сейсмических кос; и
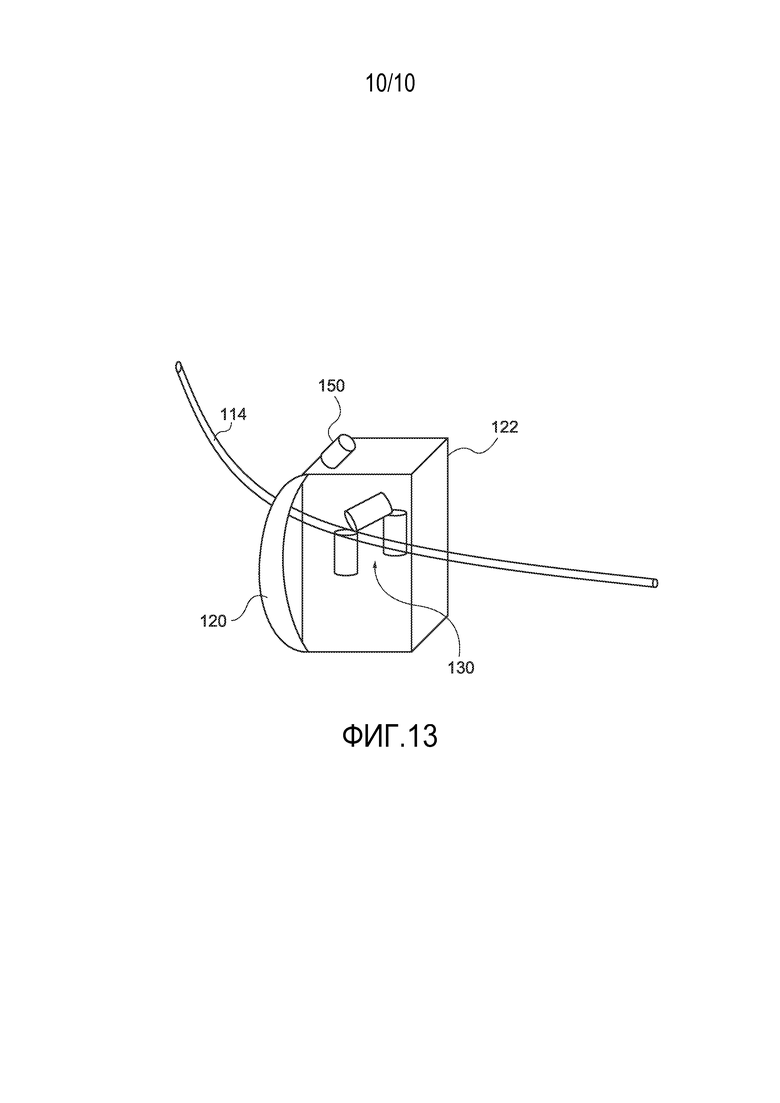
фиг. 13 - схематичный вид подводной направляющей рамы для подводного кабельного устройства.
ПОДРОБНОЕ ОПИСАНИЕ
В нижеследующем раскрытии делается обращение к некоторому количеству примеров вариантов осуществления или конкретных реализаций заявленного изобретения. Однако следует понимать, что притязания не ограничены конкретными описанными вариантами осуществления. Вместо этого любое сочетание приведенных ниже признаков и элементов независимо от того, относятся или они к различным вариантам осуществления или нет, предполагается относящимся к реализации и применению на практике заявленного изобретения. Кроме того, различные варианты осуществления могут иметь многочисленные преимущества по сравнению с предшествующим уровнем техники. Однако, хотя такие варианты осуществления могут обеспечивать преимущества по сравнению с другими возможными решениями и по сравнению с предшествующим уровнем техники, формула изобретения не ограничивается определенным вариантом осуществления независимо от того, достигается или нет конкретное преимущество. Поэтому приведенные ниже аспекты, признаки, варианты осуществления и преимущества являются только иллюстративными и не считаются элементами или ограничениями прилагаемой формулы изобретения за исключением случаев, когда это явно изложено в формуле изобретения. Точно так же упоминание изобретения не должно толковаться как обобщение любого объекта изобретения, раскрытого в этой заявке, и не должно считаться элементом или ограничением прилагаемой формулы изобретения за исключением случаев, когда это явно изложено в формуле изобретения.
На фиг. 1 представлено схематичное изображение группы 10 источников, буксируемой сейсморазведочным катером или другим судном 12. Как показано на фиг. 1, буксирные тросы или кабели 14 соединены с судном 12 на одном конце и прикреплены к подгруппе или связке 16 сейсмических источников на другом. Например, каждый буксирный трос 14 может быть соединен с рядом воздушных пушек или других источников, подвешенных к головному поплавку, бую или другому плавучему средству 18.
Группа 10 источников направляется по навигационному курсу или линии плавания буксирующим судном 12. В пределах группы 10 источников относительными положениями отдельных источников (или наборов источников) можно управлять, если снабдить каждое плавучее средство 18 или группы плавучих средств 18 динамически управляемой крыльевой системой, описанной в этой заявке.
На фиг. 2 представлен вид сбоку группы 10 источников, иллюстрирующий типичную конфигурацию динамически управляемой крыльевой системы 20. В этом конкретном примере подгруппа или связка 16 отдельных воздушных пушек или других сейсмических источников 22 подвешена к плавучему средству 18 на подвесных тросах 24, которыми определяется глубина погружения источников 22 ниже поверхности S. Подвесные тросы 24 соединены с отдельными участками поплавка 18, например, между головной секцией 18а поплавка и задним концом секции-сосиски 18b поплавка.
Поплавок 18 буксируется по поверхности S с помощью буксирного кабеля 14, который соединен с головной секцией 18а поплавка с помощью буксирного ведущего троса 26. Буксирный кабель 14 обычно содержит жизнеобеспечивающий кабель 28 с информационными и питающими соединениями для сейсмических источников 22 и соединен с крыльевой системой 20 на кабельном соединителе 29. При применении воздушных пушек жизнеобеспечивающий кабель 28 может включать в себя воздушный шланг или трубу, выполненную с возможностью подачи сжатого воздуха в сейсмические источники 22 для генерирования акустических ударных волн при возбуждении в ответ на команду с системы управления. Ударные волны (или другие сейсмические сигналы) распространяются от сейсмических источников 22 через воду или другую среду, проникают в дно моря и отражаются обратно от подземных объектов. Отраженные сигналы регистрируются на сейсмических датчиках (например, гидрофонах или геофонах в группе буксируемых кос или донных кабелях) и обрабатываются для получения геофизических данных в виде изображений, представляющих подземные структуры.
Как показано на фиг. 2, динамически управляемая крыльевая система 20 может быть подсоединена между плавучим средством 18 и погруженным участком буксирного кабеля 14, например, к кабельному соединителю 29 между головным поплавком 18а и участком 28 жизнеобеспечивающего кабеля от буксирного кабеля 14, после буксирного ведущего троса 26 и перед сейсмическими источниками 22. В ином случае погруженный конец крыльевой системы 20 может быть соединен с одним из сейсмических источников 22 (например, с плитой первой пушки в связке).
В этих конфигурациях крыльевая система 20 выполнена с возможностью удержания на заданном курсе головного поплавка 18а путем создания гидродинамических подъемных сил, управление которыми осуществляется для достижения заданного положения в поперечном направлении сейсмических источников 22 в группе 16 источников и относительно буксирующего судна 12. В ином случае одна или несколько крыльевых систем 20 могут быть соединены с секцией-сосиской 18b поплавка и расположены по направлению (или вместо) любого количества подвесных тросов или кабелей 24, например, перед первым сейсмическим источником 22, в промежуточном положении между отдельными сейсмическими источниками 22 или позади (или следующими позади) последнего сейсмического источника 22.
На фиг. 3А представлено поперечное сечение сегмента подводного крыла или секции 30 подводного крыла для динамически управляемой крыльевой системы 20, показанной выше на фиг. 1 и 2. Как показано на фиг. 3А, секция 30 подводного крыла продолжается от передней кромки 32 до задней кромки 33, задавая хорду или линию (CL) хорды между первой поверхностью 34 (например, нагнетающей поверхностью) и второй поверхностью 35 (например, засасывающей поверхностью).
Передний трос или кабель 36 управления протянут по переднему каналу 37 на переднем участке каждой секции 30 подводного крыла около передней кромки 32. Задний трос или кабель 38 управления протянут по заднему каналу 39 на заднем участке секции 30 подводного крыла около задней кромки 33. Передний и задний каналы 37, 39 могут продолжаться параллельно друг другу и передней кромке 32 секций 30 подводного крыла и находиться в общей плоскости друг с другом, ведущей кромкой 32 и продольным биссектором задней кромки 33 секций 30 подводного крыла. Кабели 36, 38 управления обычно расположены параллельно, когда они протянуты по переднему и заднему каналам 37, 39 в секциях 30 подводного крыла. В вариантах осуществления, в которых размеры множества секций 30 подводного крыла между передней кромкой 32 и задней кромкой 33 являются одинаковыми или по существу эквивалентными, кабели 36, 38 управления могут быть расположены на одинаковом расстоянии на всем протяжении их длины.
Как показано на фиг. 3А, передний и задний каналы 37, 39 обычно центрированы по линии (CL) хорды вблизи передней кромки 32 и задней кромки 33, соответственно. При такой компоновке повышается или по существу становится максимальным продольное разнесение переднего и заднего кабелей 36, 38, но это является только типичным случаем. В более общем случае продольные положения переднего и заднего каналов 37, 39 (и переднего и заднего кабелей 36, 38) изменяется между передней кромкой 32 и задней кромкой 33, равно как и соответствующие поперечные положения относительно линии (CL) хорды между первой и второй противоположными крыльевыми поверхностями 34, 35.
Поэтому передний и задний каналы 37, 39 могут быть предусмотрены для укладки переднего и заднего кабелей 36, 38 на различных местах между любым плавучим средством 18 и погруженным концом, кабелем или компонентом, например, как это показано выше на фиг. 2. Управление поворотом секции 30 подводного крыла вокруг переднего кабеля 36 осуществляется регулированием относительной длины или натяжения переднего и заднего кабелей 36, 38 для управления секцией 30 подводного крыла.
Поэтому динамически управляемая крыльевая система 20 может быть образована как управляемый обтекатель, лопатка или гидрокрыльевое устройство с использованием одной или нескольких секций 30 подводного крыла, которые управляются посредством переднего и заднего кабелей 36, 38 для создания заданных гидродинамических подъемных или управляющих сил. В ином случае крыльевая система 20 может быть описана как динамически управляемая связка обтекателей с использованием либо множества индивидуальных секций 30 подводного крыла, либо одного непрерывного гибкого подводного крыла 30 с сегментами 30, установленными по длине в направлении размаха.
Подходящие материалы для секции 30 подводного крыла включают в себя композиционные материалы или полиуретан и другие пластики или отверждаемые полимеры. Например, в одном варианте осуществления непрерывное гибкое по размаху подводное крыло 30 из полимера или композиционного материала может быть закреплено между передним и задним кабелями 36, 38 для образования по существу унитарного обтекателя или связки обтекателей. В ином случае множество отдельных жестких или гибких секций подводного крыла или лопаток 30 может быть надето на передний и задний кабели 36, 38, либо разнесенных, либо прилегающих и с соединительными звеньями или без них.
В этих вариантах осуществления секции 30 подводного крыла могут быть образованы из гибких или жестких материалов, а каждая секция 30 подводного крыла может иметь по существу один и тот же размах, или размахи могут выбираться индивидуально. Аналогично этому, каждая секция 30 подводного крыла может иметь по существу одну и ту же геометрию подводного крыла или геометрии подводных крыльев могут изменяться как функция глубины погружения или положения (например, между поверхностным поплавком или погруженными кабельными заделками). Кроме того, секции 30 подводного крыла могут быть образованы симметричными или асимметричными по форме, например, при использовании одной или нескольких официально признанных геометрий подводных крыльев, таких как НАСА, геттингенская или Эпплера.
На фиг. 3В представлен альтернативный вид секции или сегмента 30 подводного крыла, иллюстрирующий угол θ атаки, определенный относительно направления (F) потока. Подъемные или управляющие силы, образуемые секцией 30 подводного крыла, обозначены стрелкой (L).
В общем случае подъемная сила (L) зависит от геометрии подводного крыла и угла θ атаки. Поэтому регулировки относительной длины или натяжения переднего и заднего кабелей 36, 38 можно использовать для регулирования управляющих сил на каждой секции 30 подводного крыла путем изменения угла атаки. Однако следует отметить, что в случае асимметричных секций 30 подводного крыла подъемная сила (L) обычно образуется в положительном направлении (например, в направлении от нагнетающей крыльевой поверхности 34 к засасывающей крыльевой поверхности 35) даже при нулевых или несколько отрицательных углах θ атаки. С другой стороны, при симметричных секциях 30 подводного крыла подъемная сила (L) может менять знак в зависимости от угла θ атаки.
Поэтому асимметричные геометрии подводных крыльев представляют собой более стабильные конфигурации, в которых направление подъемной силы (L) по существу определяется ориентацией нагнетающей и засасывающей крыльевых поверхностей 34, 35, а управление осуществляется изменением угла атаки для увеличения или уменьшения величины соответствующих управляющих сил, действующих на секции 30 подводного крыла. Одно такое поперечное сечение асимметричного подводного крыла соответствует подводному крылу НАСА 2318, но могут использоваться другие подходящие геометрии, в том числе, но без ограничения ими, другие геометрии подводных крыльев НАСА, геттингенских и Эпплера. В ином случае передний и задний кабели 36, 38 могут быть смещены путем расположения каналов 37 и 39 вне хорды, смещены в поперечном направлении от линии (CL) хорды, описанной выше.
На фиг. 4 представлен схематичный вид динамически управляемой крыльевой системы 20, иллюстрирующий действие подъемной силы. Как показано на фиг. 4 и 5, каждая крыльевая система 20 может быть составлена из множества секций 30 подводного крыла, установленных в линию и расположенных поверх друг друга, так что все передние кромки 32 и задние кромки 33, соответственно, выровнены по существу в одном и том же направлении. Секции 30 подводного крыла удерживаются в совмещении друг с другом благодаря переднему и заднему кабелям 36, 38, проходящим по передним и задним каналам 37, 39 в каждой секции 30 подводного крыла. При создании подъемной силы (L) отдельные секции 30 подводного крыла обычно принимают криволинейный или синусоидальный профиль по размаху крыльевой системы 20 между плавучим средством 18 на поверхности (S) и погруженным концом или на соединении между кабельным соединителем 29 и буксирным кабелем 14, сейсмическим источником 22 или другим погруженным кабелем 44. Даже когда крыльевая система 20 искривляется под действием натяжения, передняя и задняя кромки 32, 33, соответственно, секций 30 подводного крыла остаются в обычной ориентации.
Следует отметить, что амплитуда воздействия показана не в масштабе и преувеличена на фиг. 4 для иллюстрации относительного смещения секций 30 подводного крыла относительно вертикали (V), в основном перпендикулярной к поверхности (S). Кроме того, кручение обычно создается по размаху, так что угол атаки может быть относительно меньше для верхней и нижней секций 30 подводного крыла вблизи плавучего средства 18 и кабельного соединителя 29 для погруженного кабеля 44, соответственно, и относительно больше для секций 30 подводного крыла в области на середине размаха. Таким образом, для секций 30 подводного крыла в области на середине размаха характерна тенденция образовывать более значительную подъемную силу, чем для верхней и нижней секций, что приводит к прогибу или синусоидальному эффекту из фиг. 4.
В ином случае геометрия подводного крыла, состоящего из отдельных секций 30 подводного крыла, может быть выбрана из условия уменьшения подъемной силы в области на середине размаха между плавучим средством 18 и погруженным кабелем 44, а не для верхней и нижней секций 30 подводного крыла. Например, секции 30 подводного крыла могут иметь различные крыльевые геометрии, выбираемые из условия образования более равномерной подъемной силы по размаху или снижения действия подъемной силы по размаху.
На фиг. 5 представлен схематичный вид, иллюстрирующий регулировочный механизм 50 для динамической крыльевой системы 20. Как показано на фиг. 5, винтовая стяжка 52 и шкив, храповой механизм, лебедка или подобное направляющее кабель средство и подающий механизм могут быть установлены на плавучем средстве 18, например, между верхним концом заднего кабеля 38 управления и задней точкой 58 крепления на задней или передней секции плавучего средства 18 (по направлению к задней кромке секций 30 подводного крыла). Передний кабель 36 прикреплен к переднему анкеру 56, прикрепленному к передней секции плавучего средства 18 (по направлению к передней кромке секций 30 подводного крыла).
Регулировочный механизм 50 может быть выполнен с возможностью регулирования либо переднего кабеля 36, либо заднего кабеля 38; оба варианта осуществления реализуются. Еще один вариант заключается в использовании регулировочного механизма 50, который обеспечивает различные регулировки как переднего, так и заднего кабелей 36, 38; например, укорочение одного кабеля при удлинении другого в то же самое время. В некоторых конструкциях может использоваться один кабель управления, протянутый от анкера 56 переднего кабеля вниз вдоль участка переднего кабеля 36, затем проходящий через участок возврата, или оборачивающийся, или изгибающийся вокруг кабельного соединителя 29, прикрепленного к погруженному кабелю 44, и возвращающийся обратно вдоль участка заднего кабеля 38 к заднему анкеру 58 по шкиву 54. В ином случае могут быть предусмотрены передний и задний кабели 36, 38 управления, например, индивидуально прикрепленные к погруженному кабельному соединителю 29. Погруженный кабель 44 может быть выполнен как буксирный трос для кабеля 48 буксируемой косы или как жизнеобеспечивающий кабель для группы воздушных пушек.
Устройство 59 управления для регулировочного механизма 50 может быть расположено на верхнем или нижнем конце крыльевой системы 20, например, как показано на фиг. 5, внутри плавучего средства 18. Подходящие устройства 59 управления включают в себя процессор, запоминающее устройство и компоненты программного обеспечения, сконфигурированные для выдачи инструкции регулировочному механизму 50 по избирательному изменению длины и/или натяжения переднего и заднего кабелей 36, 38 для регулирования подъемных и управляющих сил, создаваемых крыльевой системой 20 при изменении угла атаки, на всем протяжении отдельных секций 30 подводного крыла. Например, устройство 59 управления может быть выполнено с возможностью управления электродвигателем или подобным приводом для приведения в действие регулировочного механизма 50, при этом будет обеспечиваться автоматизированное управление путем регулирования относительной длины и натяжения переднего и заднего кабелей 36, 38 управления. Другие варианты управления включают в себя, но без ограничения ими, гидравлически и пневматически управляемый ползун или поршневые механизмы, приводы электрических лебедок и зубчатую рейку с приводом от электродвигателя и шестеренные устройства.
На фиг. 6 представлен изометрический вид регулировочного механизма 50 во внешней горизонтальной установочной конфигурации на головном поплавке 18а. В этом примере регулировочный механизм 50 включает в себя линейный исполнительный механизм 60 и шкив 54, установленные горизонтально в выемке 61 с вогнутой поверхностью, которая образована во внешней поверхности головного поплавка 18а.
Выемка 61 продолжается в продольном направлении вдоль нижнего (или подкрыльного) участка головного поплавка 18а непосредственно от переднего конца, противоположного секции-сосиске 18b, к заднему концу головного поплавка 18а вблизи секции-сосиски 18b. Несколько конструктивных обручей 63 может быть предусмотрено для опоясывания головного поплавка 18а с несколькими скобами 64 для обращения во время спуска на воду и извлечения.
На фиг. 7 представлен изометрический вид с местным разрезом головного поплавка 18а с показом регулировочного механизма 50 во внутренней вертикальной установочной конфигурации. В этом примере линейный исполнительный механизм 60 установлен внутри на заднем конце головного поплавка 18а и при работе перемещает ползун 62 вертикально вверх и вниз. Ползун 62 соединен с задним кабелем 38 управления, который протянут вниз по воронкообразной соединительной втулке 65. Соединительная втулка 65 придает радиус изгиба заднему кабелю 38 управления.
Обычно натяжение заднего кабеля 38 управления может быть увеличено для повышения мощности крыльевой системы, при этом увеличивается угол атаки и возрастает соответствующая подъемная сила. И наоборот, натяжение заднего кабеля 38 может быть уменьшено для снижения мощности системы, при этом уменьшается угол атаки и падает подъемная сила. В альтернативных вариантах осуществления регулирование может быть обратным, например, путем придания заднему кабелю 38 фиксированного натяжения и повышения или понижения натяжения переднего кабеля 36 или путем реализации различных регулировок длин тросов.
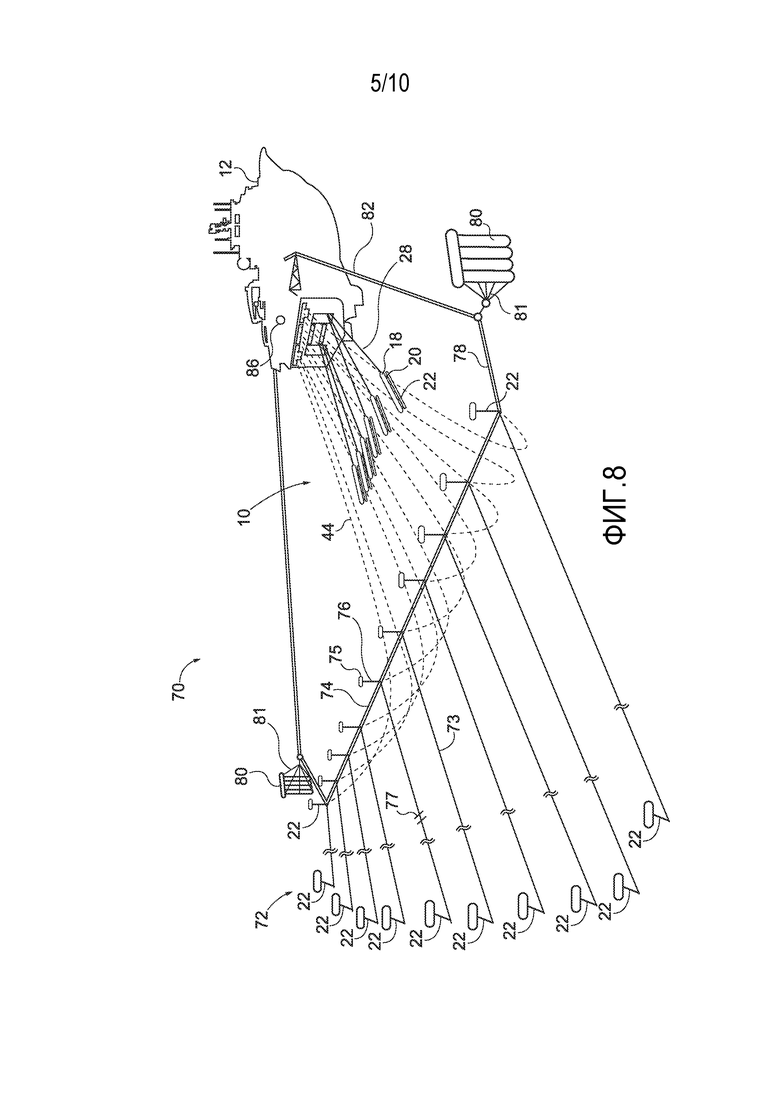
На фиг. 8 представлен схематичный вид типичной буксируемой сейсмической установки 70 с использованием одной или нескольких динамически управляемых крыльевых систем 22 для удержания в заданных положениях компонентов источников и/или буксируемых кос. Как показано на фиг. 8, сейсмическая установка 70 включает в себя группу 10 источников и группу 72 буксируемых кос. Группа 10 источников включает в себя некоторое количество головных поплавков/поплавков 18 по форме сосиски, к которым подвешены отдельные сейсмические источники 22, с жизнеобеспечивающими кабелями 28 для электроэнергии, данных и соединительными воздушными каналами, ведущими к сейсморазведочному судну 12. Группа 72 буксируемых кос включает в себя множество отдельных буксируемых кос 73 с сейсмическими приемниками, распределенными по длине каждой косы, для наблюдения отраженных сигналов, возникающих в результате излучений сейсмических источников 22.
Буксируемые косы 73 соединены с буксирными тросами или другими погруженными кабелями 44 на всем протяжении распорного или разделительного троса 74, который подвешен на глубине погружения буксируемых кос под соответствующими головными буями 75 при использовании оттяжных тросов или глубинных тросов 76. Буксируемые косы 73 могут продолжаться на много километров от головных буев 75 к соответствующему количеству хвостовых буев 77 на заднем конце (показано не в масштабе).
Как показано на фиг. 8, разделительный трос 74 протянут в поперечном направлении с прикреплением к ответвительным тросам 78, которые соединены с параванами или отклонителями 80 через посредство направляющих строп 81. Широкие буксирные тросы 82 проходят между параванами или отклонителями 80 и буксирующим судном 12. Динамически управляемую крыльевую систему 20 можно располагать на одном или нескольких оттяжных тросах или глубинных тросах 76 буксируемых кос или вместо них, продолжающихся от головных буев 75 вниз к переднему концу буксируемых кос 73. Кроме того, управляемые крыльевые системы 20 можно располагать между хвостовыми буями 77 и задними концами буксируемых кос 73 и на промежуточных местах нахождения буксируемых кос.
Сейсморазведочное судно 12 снабжено навигационной системой 86, включающей один или несколько модулей управления подводными крыльями, выполненных с возможностью поддержания связи с динамически управляемыми крыльевыми системами 20, размещенными различным образом в группе 10 источников и группе 72 буксируемых кос и/или среди других компонентов буксируемой сейсмической установки 70. Кроме того, в дополнение к управлению источниками крыльевые системы 20 можно использовать для независимого управления и позиционирования в поперечном направлении буксируемых кос 73 с отдельной распоркой или разделительным тросом 74 или без них.
Кроме того, управляемые крыльевые системы 20 можно размещать вместо отклонителей или параванов 80, например, на конечных местах нахождения буксируемых кос, показанных на фиг. 8, без необходимости в отдельных ответвительных тросах и широкого буксирного троса 82. В ином случае крыльевые системы 20 можно использовать в одном или нескольких отклонителях или параванах 80 или вместо них при использовании аналогичной конфигурации ответвительных кабелей.
В более общем случае крыльевую систему 20 можно использовать для управления направлением движения целого ряда погруженных кабелей и поплавковых устройств, пригодных не только для удержания в заданных положениях сейсмических источников и буксируемых кос, но также при развертывании морского донного кабеля и узла, съемках гидролокатором бокового обзора и применениях гидролокатора. Кроме того, управляемую крыльевую систему 20 можно приспособить для более общих (несейсмических) применений, включающих использование паравана, отклонителя и гидрокрыльевых систем. К дополнительным вариантам относится использование вместе с кабелем или P-кабелем и морскими донными кабелями паравана/отклонителя.
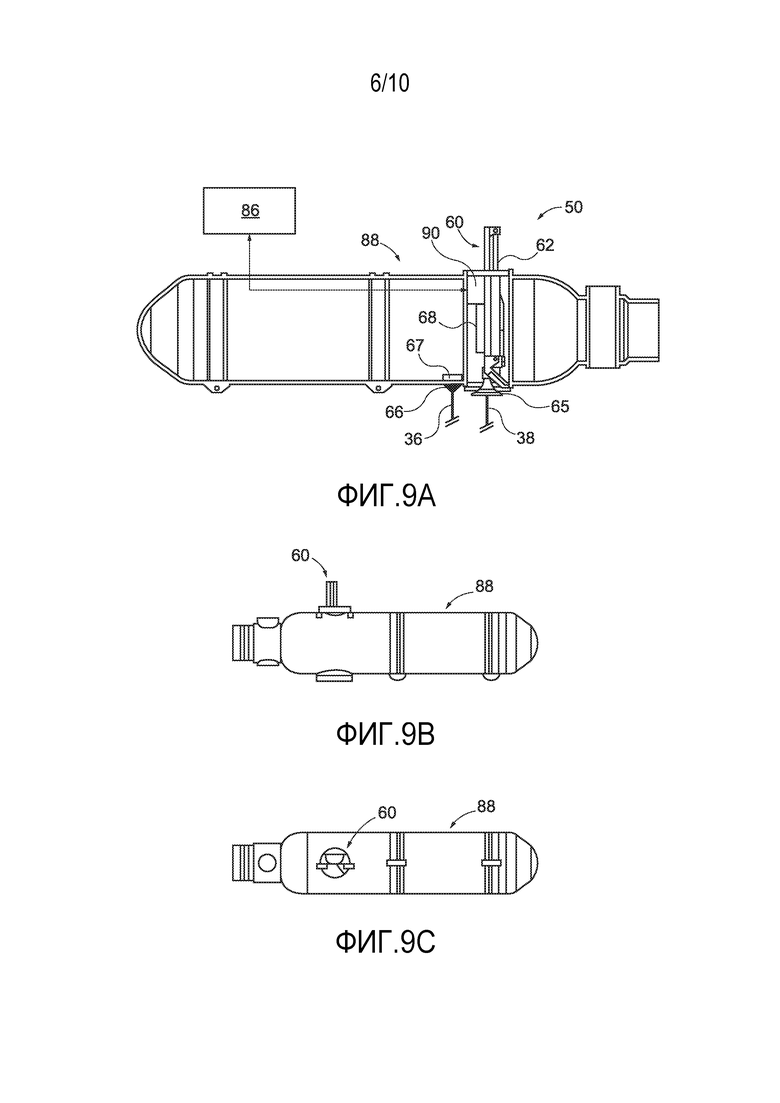
На фиг. 9А представлено поперечное сечение типового поплавка или плавучего устройства 88 с внутренним вертикально ориентированным регулировочным механизмом 50 кабеля. На фиг. 9В и 9С представлены виды сбоку и сверху, соответственно, поплавка или плавучего устройства 88.
Плавучее устройство 88 может иметь форму надводного или подводного поплавка, устройства с положительной плавучестью или другого устройства, которым определяется некоторая форма верхней и/или нижней точки крепления, с которой можно соединять и буксировать многоярусную крыльевую систему 20. Подходящие примеры включают в себя, но без ограничения ими, головной поплавок, буй-сосиску, хвостовой поплавок, хвостовой буй или подобное надводное или подводное плавучее средство, выполненное с возможностью управления сейсмическим источником или буксируемой косой или, как описывалось выше, предназначенное для применения совместно с типовым динамически управляемым гидрокрылом или лопаткой. В дополнительных вариантах осуществления исполнительная система может использоваться вместе с горизонтальной связкой подводных крыльев, например, для создания направленной вверх или вниз силы. Точно так же, динамически управляемые подводные крылья можно располагать в параванной системе с нейтральной плавучестью, выполненной с возможностью буксирования трехмерной расстановки буксируемых кос подо льдом. Кроме того, концепцию можно использовать для поплавкового устройства источников с нейтральной плавучестью (например, подо льдом), например, в Арктике или в другой холодной водной среде.
Как показано на фиг. 9А, регулировочный механизм 50 включает в себя линейный исполнительный механизм 60 с перемещаемым вертикально ползуном 62, соединенным с задним кабелем 38 управления. Передний кабель 36 управления прикреплен к плавучему средству 18 с помощью передней монтажной опоры 66, например, вместе с динамометрическим датчиком или тензометрическим датчиком 67, выполненным с возможностью определения натяжения переднего кабеля 36 управления. Дополнительная система 68 датчиков может быть сконфигурирована для определения вертикального положения ползуна 62 и соответствующей длины и натяжения заднего кабеля 38 управления. Подходящие компоненты для системы 68 датчиков включают в себя, но без ограничения ими, тензометрические датчики, динамометрические датчики, язычковые переключатели и линейные и оптические кодирующие компоненты. Кроме того, могут использоваться датчики поворота и кодовые датчики положения, например, для определения положения ползуна 62 путем подсчета числа поворотов ходового винта или другого поворотного приводного компонента линейного исполнительного механизма 60.
Система 90 управления подводным крылом может быть установлена в плавучем устройстве 88 и снабжена подходящим процессором и компонентами запоминающего устройства, поддерживающими обмен данными с линейным исполнительным механизмом 60 и модулем (или модулями) управления подводным крылом в навигационной системе 86. Система 90 управления подводным крылом взаимодействует с контроллером 59 и навигационной системой 86 для обеспечения управляемости в различных режимах работы, описанных ниже.
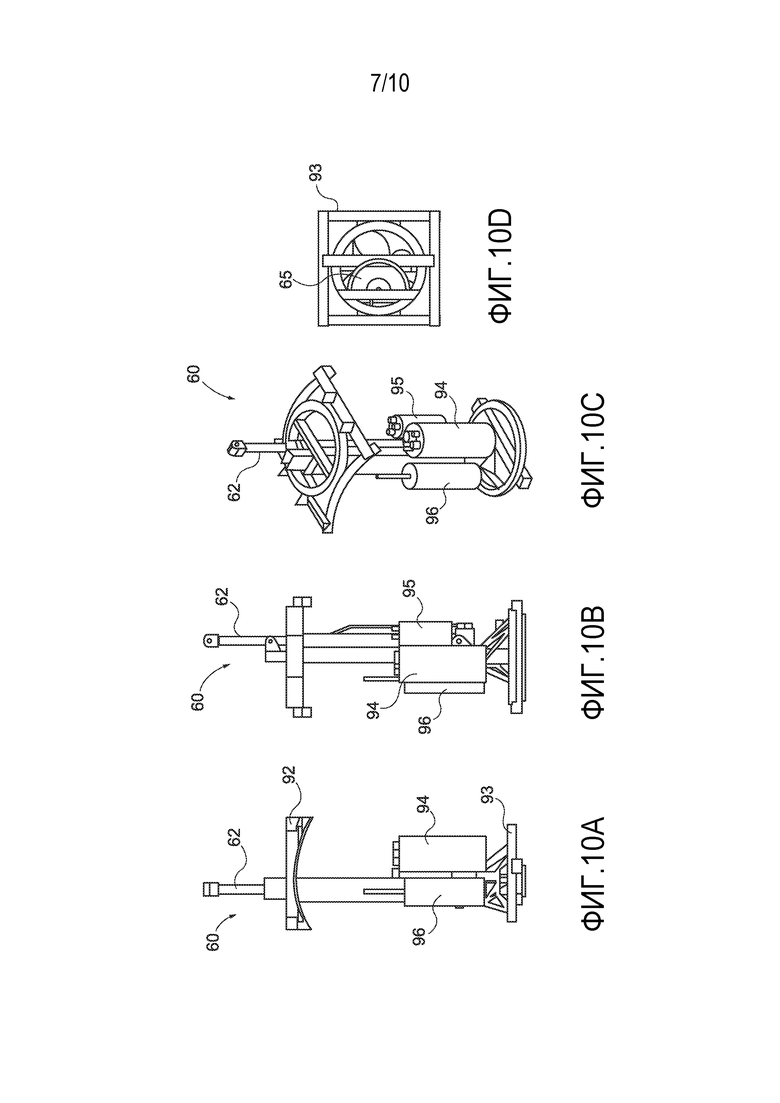
На фиг. 10А-10D представлены виды спереди, сбоку, в изометрии и снизу линейного исполнительного механизма 60 для регулировочного механизма кабеля, например регулировочного механизма 50, показанного выше на фиг. 5-7 и 9. Как показано на фиг. 10A-10D, линейный исполнительный механизм 60 может быть установлен между верхним кронштейном 92 и нижним кронштейном 93, которые приспособлены для установки линейного исполнительного механизма 60 внутри головного поплавка, буя или другого устройства 88 с положительной плавучестью, описанного в этой заявке, для использования при регулировании длины и натяжения кабеля управления динамически управляемого крыльевого или лопаточного устройства.
Исполнительная система 60 может включать в себя одно или несколько средств 94 управления исполнительным механизмом, электронику исполнительного механизма (или регулятор электродвигателя) 95 и аккумулятор 96. В ином случае, как описано выше, один или несколько из этих компонентов могут быть встроены в систему 90 управления подводным крылом. В дополнительных вариантах осуществления функции исполнительного механизма и регулятора электродвигателя могут выполняться в модуле управления подводным крылом или в более универсальной системе навигации и управления.
РЕЖИМЫ РАБОТЫ
Различные режимы работы можно программировать в управляющем программном обеспечении для обеспечения активной навигации подгрупп источников и буксируемых кос при использовании динамически управляемых крыльевых систем, описанных в этой заявке. Компоненты программного обеспечения могут быть включены как в локальные системы управления подводными крыльями, которые расположены на поплавковом устройстве или вместе с исполнительной системой, так и в соответствующие модули управления подводными крыльями, которые используются вместе с навигационной системой на борту буксирующего судна. В ином случае один или несколько компонентов программного обеспечения могут быть сконфигурированы для работы по сети, например электрической, радиосети, или в структуре акустической связи и команд.
Более конкретно, программное обеспечение сконфигурировано для управления линейным исполнительным механизмом, установленным на каждом головном поплавке (или другом поплавковом устройстве) подгруппы источников. Чтобы изменить подъемную силу набора управляемых подводных крыльев, закрепленного между головным поплавком и плитой первой пушки или другим местом погруженного кабеля, линейный исполнительный механизм изменяет относительную длину или натяжение заднего кабеля управления в сравнении с передним кабелем управления, изменяет угол атаки, чтобы, как описано выше, обеспечить заданную подъемную или управляющую силу.
На фиг. 11A-11D показаны типичные конфигурации источников для различных режимов работы динамически управляемой крыльевой системы. Эти четыре конфигурации могут буксироваться позади судна с источниками, при этом на фиг. 11А и 11В представлены конфигурации с одним источником, а на фиг. 11С и 11D представлены конфигурации с многочисленными источниками.
Номера на фиг. 11A-11D могут обозначать источники или связки подгрупп. Номера связок источников последовательно возрастают от правого борта к левому борту, как номера всех источников (комбинаций связок подгрупп, которые возбуждаются согласованно). В ином случае номера подгрупп могут относиться к положениям буксируемых кос, а не к положениям источников, или к индексам параванов или отклонителей.
УПРАВЛЯЮЩЕЕ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
При работе поток навигационных данных подается с модулей управления подводными крыльями навигационной системы в локальную систему управления подводным крылом, чтобы команды исполнительному механизму могли быть определены на основании положений подгрупп. Управляющее программное обеспечение может включать в себя логический блок пропорционально-интегрально-дифференциального (ПИД) регулирования для поддержания надлежащего разделения. В альтернативных проектах программного обеспечения система управления подводными крыльями и/или модули управления подводными крыльями могут заменять одну или несколько систем управления исполнительными механизмами, а программное обеспечение управления исполнительными механизмами может быть встроено в систему управления подводными крыльями, модули управления подводными крыльями или в саму навигационную систему. Например, соответствующий управляющий код может быть включен в модуль управления источником или буксируемой косой. Предполагаются функциональные возможности последующего отслеживания и 4-мерного управления, но ни то, ни другое не требуется обязательно в любом конкретном техническом решении.
ВХОДНЫЕ ДАННЫЕ ДЛЯ УПРАВЛЯЮЩЕГО ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
Кроме того, программное обеспечение для навигации судна может осуществлять определение в реальном времени положений каждой подгруппы или связки подгрупп. Каждая подгруппа может быть снабжена по меньшей мере одной гондолой глобальной системы определения местоположения (например, дифференциальной глобальной системы определения местоположения или относительной глобальной системы определения местоположения), а в некоторых случаях - двумя. Понятно, что по меньшей мере одна гондола пушки или источника должна обладать функциональной возможностью обмена информацией о местоположении с управляющим программным обеспечением. Кроме того, могут использоваться акустические, радиолокационные или лазерные системы определения местоположения.
Имеются два сообщения с данными, одно от навигационной системы (или модулей управления подводными крыльями) к контроллеру подводного крыла с информацией о местоположении и одно от контроллера подводного крыла к навигационной системе (или модулей управления подводными крыльями), содержащее состояние крыльевой системы и аварийные сигналы. Для этих сообщений навигационных данных может использоваться существующий протокол для передачи навигационных данных, например, во взаимодействии с предоставляемой клиентом или специализированной системой управления. Форматы сообщений, описываемых в этой заявке, могут быть определены как подобные по содержанию существующим навигационным сообщениям, но обеспечивают динамическое управление крыльевыми системами, описанными выше.
Данные от навигационной системы к контроллеру подводного крыла. Данные от навигационной системы к компьютеру управления подводными крыльями предоставляются через равные промежутки времени, например, один раз в секунду. Независимо от режима работы судна (например, интерактивного, автономного и т.д.) выходные данные могут быть доступны во все моменты времени. Навигационная система делает информацию о местоположении в воде доступной компьютеру управления подводными крыльями в реальном времени, например, информацию, которая существует не больше чем 2 с или находится в другом временном окне. Может передаваться сообщение с командой и каждое сообщение может быть привязано к всеобщему скоординированному времени.
Сообщение от навигационной системы к компьютеру управления подводными крыльями. Эти сообщения можно разделить на три части: 1) главная часть; 2) данные о судне; и 3) данные об источнике. Соответствующая нумерация источников может использоваться для различных компонентов источников и группы буксируемых кос (например, от 1 до N, от правого борта к левому борту). Кроме того, может использоваться соответствующая нумерация связок подгрупп (от 1 до N, от правого борта к левому борту). Механизм обеспечения безопасности предусмотрен для предупреждения контроллера о любых проблемах при определении местоположения.
Состояние и аварийные сигналы от контроллера подводного крыла к навигационной системе. Соответствующие основные поля сообщений, относящиеся к состоянию и аварийным сигналам, посылаемым с контроллера подводного крыла к навигационной системе (или модулям управления подводными крыльями), включают в себя, но без ограничения ими: заголовок, время сообщения (время сообщения; всеобщее скоординированное время), идентификационный номер источника (1…N; 1 - правый борт; N - левый борт), идентификационный номер исполнительного механизма (порядковый номер исполнительного механизма), состояние контроллера (в режиме ожидания, активный, неисправен), натяжение троса (например, 0-2000 кг), сообщение о неисправностях (неисправность имеется, код неисправности; в противном случае 0) и конец сообщения (конец сообщения; например, <CR><LF>). Эти поля могут повторяться в зависимости от количества связок источников, например, один раз для каждой связки источников.
РЕЖИМЫ РАБОТЫ
Функции программного обеспечения исполнительного механизма в одном или нескольких режимах работы включают в себя, но без ограничения ими, любой из режимов 1-6 работы, перечисленных ниже.
1. Ручной режим. Любой исполнительный механизм можно перемещать вручную до границ функциональных возможностей исполнительных механизмов. Минимальное и максимальное фиксируемые положения должны быть известны, чтобы отсутствовало всякое механическое повреждение ползуна. Этот режим обычно следует использовать во время спуска на воду (и извлечения), чтобы комплектовать подгруппы на одной стороне, что позволит работать подгруппе. В программном обеспечении должен быть задан параметр минимального разнесения подгрупп, чтобы оператор не мог перемещать подгруппы на столь близкие расстояния, при которых они спутываются.
2. Режим калибровки. Любые две подгруппы можно выбирать (в идеальном случае №2 и №5 в режиме многочисленных источников), чтобы получать фиксированное разнесение при выравнивании отсчетов натяжения на их соответствующих динамометрических датчиках. Этот режим позволяет удовлетворять требованиям по разнесению подгрупп, но в то же время выравнивать подъемную силу таким образом, чтобы сохранялся запас подъемной силы в направлениях левого борта и правого борта. Во время этой калибровки подгруппы 1 и 6 следует перемещать при максимальном разнесении. При неизбежном столкновении любых подгрупп (разнесение меньше, чем параметр минимального разнесения из режима №1), функция калибровки должна прерываться, а оператор предупреждаться об опасности.
3. Режим неавтономной работы. Одна подгруппа может быть выбрана ведущей подгруппой, относительно которой все другие должны удерживаться на фиксированном расстоянии, основанном на номинальной геометрии. Если обнаруживается ситуация, приводящая к столкновению, подъемная сила всех подгрупп должна снижаться для поддержания безопасного разнесения. Для компенсации переменных течений и скоростей буксировки можно использовать пропорционально-интегрально-дифференциальное регулирование, чтобы выполнять автоматические коррекции.
4. Автономный режим работы. Этот режим может быть выбран при выполнении одного из двух условий: либо поддержание неавтономного режима работы после изменения режима, либо переход к альтернативной конфигурации, если навигационная система указывает на автономное состояние. Альтернативной ситуацией может быть веерный режим работы, в котором все подгруппы сами пытаются поддерживать максимальное разнесение.
5. Режим выполнения работы. Во время этой ситуации все подгруппы могут переходить из альтернативной конфигурации автономного режима в режим неавтономной работы. Если подгруппы уже находятся в режиме неавтономной работы, то нет необходимости выполнять изменение.
6. Управление в режиме действия. Этот режим позволяет независимо управлять каждым источником по левому борту и по правому борту для соответствия заданным требованиям по изгибу и перекрытию. Во время управления поддерживается номинальное расстояние между подгруппами в каждом источнике.
РЕЖИМ ЗАЩИЩЕННЫХ ОТКАЗОВ
Кроме того, программное обеспечение исполнительного механизма работает в любом из двух режимов защищенных отказов, перечисленных ниже.
1. Если обмен информацией между судном и любым исполнительным механизмом или контроллером подводного крыла нарушается, последнее известное положение исполнительного механизма должно сохраняться, а оператору выдаваться предупреждающее сообщение. В этом случае отказавшая подгруппа должна становиться ведомой подгруппой, а все другие должны управляться для поддержания на расстоянии от отказавшей подгруппы.
2. Если измеряемое натяжение буксирного троса становится ниже некоторого минимального порогового значения, что указывает на отделившийся трос, режим должен автоматически переключаться и становиться автономным веерным режимом работы для снижения вероятности потенциального захлестывания и образования предупреждающего сигнала.
ДОПОЛНИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
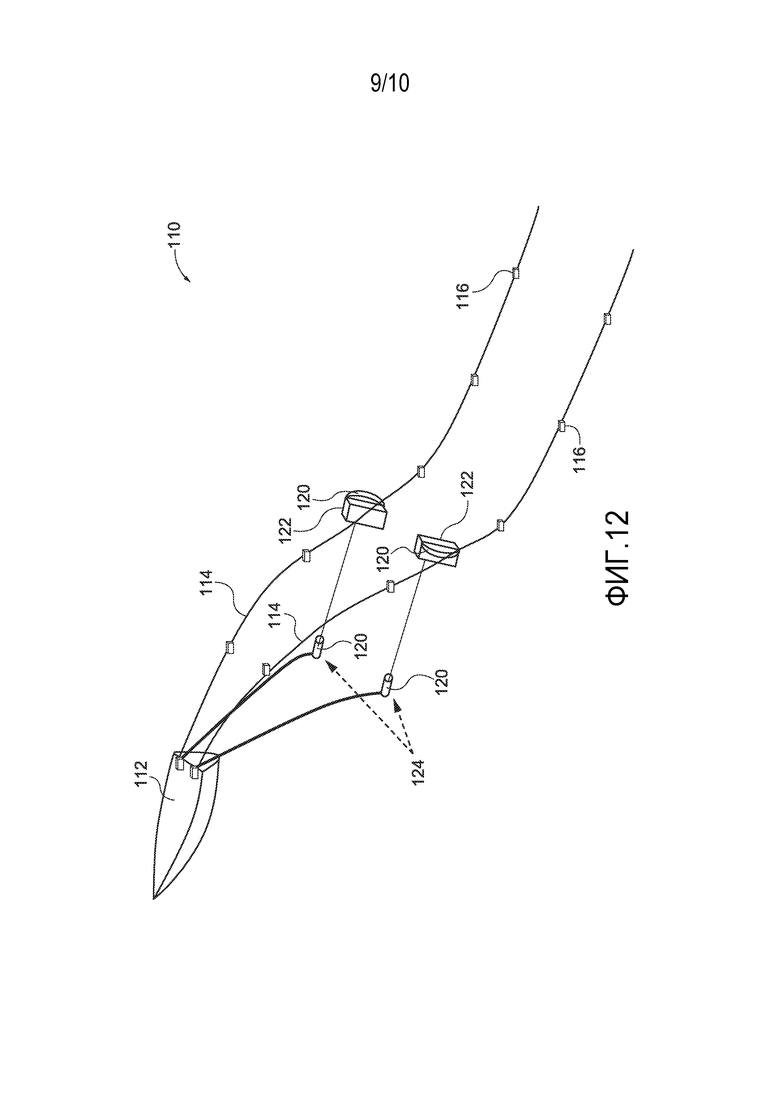
На фиг. 12 представлен схематичный вид динамически управляемой крыльевой системы 120, применяемой при развертывании подводной косы, в составе устройства 110 с использованием, например, динамически управляемой крыльевой системы 20, описанной выше. Как показано на фиг. 12, подводное устройство 110 включает в себя узловые соединительные тросы или кабели 114 для соединения узлов 116. Кабели 114 могут буксироваться позади судна 112 или выпускаться с судна.
Одна или несколько динамически управляемых крыльевых систем 120 могут использоваться на различных местах в устройстве 110, например, в управляющей направляющей раме 122 или аналогичном рулевом устройстве, выполненном с возможностью создания поперечной силы. В ином случае одна или несколько динамически управляемых крыльевых систем 120 могут использоваться, например, в заглубляющей системе 124 в горизонтальной конфигурации, выполненной с возможностью создания действующей вниз силы или действующей вверх/вниз силы. В некоторых вариантах осуществления крыльевые системы 120 используются как в рулевом устройстве (устройствах) 122, так и в заглубляющей системе (системах) 124.
На фиг. 13 представлен схематичный вид подводной направляющей рамы 122 или подобного рулевого устройства для подводного кабельного устройства 110. Как показано на фиг. 13, направляющая рама 122 соединена с узловым соединительным кабелем 114. Направляющая рама 122 включает в себя динамически управляемую крыльевую систему 120, измерительное оборудование 130 и исполнительный механизм 150 (например, такой же, как исполнительный механизм 60, описанный выше). Измерительное оборудование 130 может включать в себя дополнительные компоненты, включая, но без ограничения ими, акустические системы определения местоположения с ультракороткой базой (УКБ) или другие акустические системы, один или несколько датчиков перемещения, фатометр, акустические доплеровские профилометры течений (АДПТ), гидролокатор переднего обзора и электросиловое и связное оборудование, выполненное с возможностью поддержания связи с модулем управления подводным крылом или надводной навигационной системой, например, на буксирующем судне.
Изложенное выше касается примеров вариантов осуществления, но другие и дальнейшие варианты осуществления могут быть получены путем дополнительного сочетания как с признаками, раскрытыми в этой заявке, так и с другими, известными из предшествующего уровня техники, без отступления от основного объема этого раскрытия, и эти варианты могут охватываться формулой изобретения, которая приведена ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| ОПЕРАЦИИ АРКТИЧЕСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2624835C2 |
| Буксируемое устройство | 2018 |
|
RU2688634C1 |
| СЕЙСМОКОСА, ОТСЛЕЖИВАЮЩАЯ МОРСКОЕ ДНО | 2007 |
|
RU2451309C2 |
| БУКСИРУЕМАЯ ЛИНИЯ | 2007 |
|
RU2361773C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СУДНОМ | 2018 |
|
RU2756410C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |

Изобретение относится к области геофизики и может быть использовано для поведения морских сейсморазведочных мероприятий. Крыльевые системы для удержания в заданных положениях источников и приемников в установке для сбора сейсмических данных соединены с буями, поддерживающими сейсмические источники и приемники. Каждая крыльевая система включает в себя устройство (18) с положительной плавучестью, пару кабелей управления, множество секций (30) подводного крыла и исполнительный механизм (52). Пара кабелей управления может быть прикреплена к плавучему устройству и продолжаться вниз от плавучего устройства до погруженного конца. Множество секций подводного крыла могут быть расположены по направлению кабелей управления между плавучим устройством (18) и погруженным концом. Исполнительный механизм может быть выполнен с возможностью регулирования углов атаки секций подводного крыла путем изменения натяжения одного или обоих кабелей управления. Управление направлением движения осуществляется в нескольких режимах, описываемых данными, распределяемыми через систему управления, находящуюся в связи с крыльевыми системами. Технический результат – повышение точности и информативности получаемых данных. 4 н. и 25 з.п. ф-лы, 13 ил.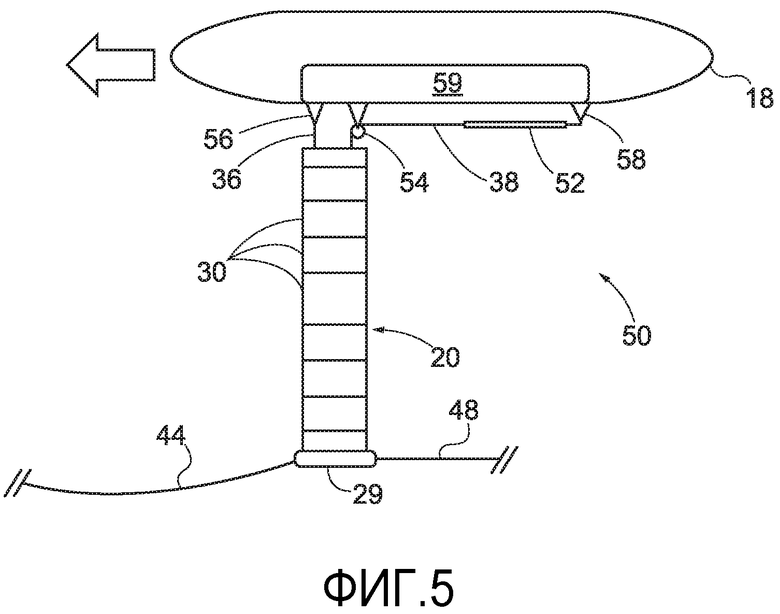
1. Сейсмическая установка, содержащая:
устройство с положительной плавучестью;
пару кабелей управления, прикрепленных к устройству с положительной плавучестью и продолжающихся вниз от устройства с положительной плавучестью до погруженного конца;
множество секций подводного крыла, расположенных по направлению кабелей управления между устройством с положительной плавучестью и погруженным концом; и
линейный исполнительный механизм, установленный по меньшей мере частично в устройстве с положительной плавучестью и выполненный с возможностью регулирования углов атаки секций подводного крыла путем изменения натяжения одного или обоих кабелей управления, и
контроллер, выполненный с возможностью выдачи указания линейному исполнительному механизму на регулирование натяжения одного или обоих кабелей управления и тем самым на регулирование подъемной силы, создаваемой множеством секций подводного крыла.
2. Установка по п. 1, в которой линейный исполнительный механизм выполнен с возможностью регулирования натяжения посредством регулирования длины одного из кабелей управления.
3. Установка по п. 2, в которой линейный исполнительный механизм расположен вертикально относительно кабелей управления.
4. Установка по п. 1, в которой в каждой из секций подводного крыла образованы передний канал вблизи передней кромки каждой секции подводного крыла, по которому протянут первый из кабелей управления, и задний канал вблизи задней кромки каждой секции подводного крыла, по которому протянут второй из кабелей управления.
5. Установка по п. 4, в которой передний канал и задний канал расположены на одинаковом расстоянии друг от друга в каждой из множества секций подводного крыла.
6. Установка по п. 4, в которой линейный исполнительный механизм выполнен с возможностью регулирования длины второго кабеля управления, чтобы тем самым регулировать натяжение второго кабеля управления.
7. Установка по п. 1, в которой пара кабелей управления образована в виде одного кабеля, который изгибается на погруженном конце с образованием пары кабелей управления.
8. Установка по п. 1, в которой погруженный конец соединен с кабелем, выполненным с возможностью буксирования одного или нескольких сейсмических источников, подвешенных к устройству с положительной плавучестью.
9. Установка по п. 1, в которой погруженный конец соединен с кабелем, выполненным с возможностью буксирования сейсмической буксируемой косы позади устройства с положительной плавучестью.
10. Установка по п. 1, в которой контроллер расположен в устройстве с положительной плавучестью и выполнен с возможностью поддерживать связь с передачей данных с линейным исполнительным механизмом.
11. Установка по п. 1, дополнительно содержащая навигационный модуль, поддерживающий связь с передачей данных с контроллером, при этом навигационный модуль выполнен с возможностью подачи навигационных данных к контроллеру, так чтобы команды исполнительного механизма предназначались для направления устройства с положительной плавучестью на основе подъемной силы.
12. Установка по п. 1, в которой секции подводного крыла имеют по существу однородные асимметричные крыльевые геометрии.
13. Установка по п. 1, в которой секции подводного крыла имеют по существу неоднородные крыльевые геометрии, сконфигурированные для уменьшения подъемной силы в области середины размаха множества секций подводного крыла по сравнению с концевыми областями вблизи устройства с положительной плавучестью и погруженного конца.
14. Установка по п. 1, в которой пара кабелей управления содержит передний кабель управления, прикрепленный к устройству с положительной плавучестью посредством передней монтажной опоры и дополнительно содержащее динамометрический датчик или тензометрический датчик, выполненные с возможностью определения натяжения переднего кабеля управления.
15. Установка по п. 1, в которой линейный исполнительный механизм содержит ползун, соединенный с задним кабелем управления.
16. Установка по п. 15, дополнительно содержащая
датчик, выполненный с возможностью определения положения ползуна и соответствующей длины и натяжения заднего кабеля управления,
и датчик поворота или кодовый датчик положения сконфигурированные для определения положения ползуна путем подсчета числа поворотов ходового винта или другого поворотного приводного компонента линейного исполнительного механизма.
17. Система для морских сейсмических исследований, содержащая:
надводное или подводное плавучее устройство;
передний кабель управления, соединенный с устройством с положительной плавучестью и продолжающийся ниже него;
задний кабель управления, соединенный с устройством с положительной плавучестью и продолжающийся ниже него;
линейный исполнительный механизм, установленный по меньшей мере частично в устройстве с положительной плавучестью, при этом линейный исполнительный механизм выполнен с возможностью регулирования натяжения заднего кабеля управления относительно переднего кабеля управления; и
множество секций подводного крыла, расположенных по направлению переднего и заднего кабелей управления, при этом:
секции подводного крыла выполнены с возможностью создания подъемной силы на основании углов атаки их; и
углы атаки секций подводного крыла изменяются как функция натяжения, и
контроллер подводного крыла, выполненный с возможностью выдачи указания линейному исполнительному механизму на регулирование натяжения одного или переднего или заднего кабелей управления, и тем самым на регулирование подъемной силы, создаваемой множеством секций подводного крыла.
18. Система по п. 17, в которой:
линейный исполнительный механизм является вертикально установленным в плавучем устройстве; а
система также содержит датчик, выполненный с возможностью измерения натяжения одного или обоих из переднего и заднего кабелей управления.
19. Система по п. 18, дополнительно содержащая контроллер подводного крыла, расположенный в плавучем устройстве и сконфигурированный для выдачи указания линейному исполнительному механизму на регулирование натяжения заднего кабеля управления и тем самым на регулирование подъемной силы, создаваемой множеством секций подводного крыла.
20. Сейсмическая установка, содержащая:
множество буксируемых сейсмических источников; и
одну или более динамически управляемых рулевых систем, прикрепленных к сейсмическим источникам, соответственно, при этом каждая рулевая система содержит:
плавучее устройство;
пару кабелей управления, прикрепленных к плавучему устройству и продолжающихся вниз от плавучего устройства до погруженного конца;
множество секций подводного крыла, расположенных по направлению кабелей управления между плавучим устройством и погруженным концом; и
линейный исполнительный механизм, установленный по меньшей мере частично в плавучем устройстве, выполненный с возможностью регулирования углов атаки секций подводного крыла путем изменения натяжения одного или обоих кабелей управления, и
контроллер подводного крыла, выполненный с возможностью выдачи указания линейному исполнительному механизму на регулирование натяжения одного или обоих кабелей управления и тем самым на регулирование подъемной силы, создаваемой множеством секций подводного крыла.
21. Способ управления сейсмической установкой, содержащий:
множество буксируемых сейсмических устройств; и
одна или более динамически управляемых рулевых систем, прикрепленных к сейсмическим устройствам, соответственно, при этом каждая рулевая система содержит:
плавучее устройство;
передний кабель управления, соединенный с плавучим устройством и продолжающийся ниже плавучего устройства;
задний кабель управления, соединенный с плавучим устройством и продолжающийся ниже плавучего устройства;
множество секций подводного крыла, расположенных по направлению переднего и заднего кабелей управления;
линейный исполнительный механизм, по меньшей мере частично установленный в плавучем устройстве, при этом исполнительный механизм выполнен с возможностью регулирования углов атаки секций подводного крыла путем изменения натяжения одного или обоих кабелей управления; и
контроллер подводного крыла, сконфигурированный для выдачи указания линейному исполнительному механизму на регулирование натяжения любого из двух или обоих кабелей управления и тем самым на регулирование подъемной силы, создаваемой множеством секций подводного крыла;
при этом способ содержит:
передачу данных от контроллера подводного крыла одной или нескольких рулевых систем, чтобы конкретизировать режим соответствующего линейного исполнительного механизма; и
побуждение линейного исполнительного механизма на регулирование натяжения заднего кабеля управления относительно переднего кабеля управления, чтобы создавать подъемную силу для управления соответствующим плавучим устройством и прикрепленными сейсмическими устройствами.
22. Способ по п. 21, дополнительно содержащий:
передачу данных от контроллера подводного крыла одной или нескольких рулевых систем, причем данные сконфигурированы для конкретизации минимального или максимального режима, и
побуждение одного или нескольких линейных исполнительных механизмов на перемещение к минимальному или максимальному упору, чтобы минимизировать или максимизировать подъемную силу.
23. Способ по п. 21, дополнительно содержащий: передачу данных от контроллера подводного крыла и двух или большего количества выбранных рулевых систем,
побуждение соответствующих линейных исполнительных механизмов на создание равного натяжения соответствующих задних кабелей управления в выбранных рулевых системах.
24. Способ по п. 21, дополнительно содержащий:
передачу данных от контроллера подводного крыла одной или более рулевых систем, причем данные сконфигурированы для конкретизации режима, определяющего одну из рулевых систем в качестве ведущей рулевой системы; и
побуждение соответствующих линейных исполнительных механизмов на создание натяжения задних кабелей, выполненных с возможностью ориентации множества секций подводного крыла для поддержания фиксированного поперечного разделительного расстояния между плавучим устройством ведущей рулевой системы и плавучих устройств других рулевых систем.
25. Способ по п. 21, дополнительно содержащий:
передачу данных от контроллера подводного крыла двух или большего количества выбранных рулевых систем, причем данные сконфигурированы для конкретизации режима выбранных рулевых систем для поддержания максимального поперечного разделительного расстояния между соответствующими плавучими устройствами выбранных рулевых систем; и при этом
побуждение исполнительных механизмов на создание натяжения задних кабелей, выполненных с возможностью ориентации множества секций подводного крыла, для поддержания максимального поперечного разделительного расстояния между плавучими устройствами одной или более соседних рулевых систем.
26. Способ по п. 21, дополнительно содержащий:
передачу данных от контроллера подводного крыла одной или более рулевых систем, причем данные сконфигурированы для конкретизации режима независимого управления, включающих инструкции по независимому управлению для каждого из плавучего устройств; побуждение исполнительных механизмов на создание натяжения задних кабелей, выполненных с возможностью реализации соответствующих инструкций по независимому управлению для каждого соответствующего плавучего устройства.
27. Способ по п. 21, дополнительно содержащий:
передачу данных от контроллера подводного крыла одной или более рулевых систем, причем данные сконфигурированы для конкретизации режима, определяющего одну из рулевых систем в качестве ведущей рулевой системы в случае потери связи с ними; и
побуждение ведущей рулевой системы к передаче данных к другим рулевым системам.
28. Способ по п. 21, также содержащий:
передачу данных от контроллера подводного крыла одной или более рулевых систем, причем данные сконфигурированы для конкретизации режима с поддержанием максимального поперечного разнесения между соответствующими плавучими устройствами на основании натяжения буксирного троса, прикрепленного к одному из плавучих устройств, находящегося ниже минимального порогового значения; и
побуждение линейных исполнительных механизмов к созданию натяжения задних кабелей, выполненных с возможностью ориентации множества секций подводного крыла, для поддержания максимального поперечного разделительного расстояния между плавучими устройствами рулевых систем, когда натяжение буксирного троса падает ниже минимального порогового значения.
29. Способ по п. 21, в котором одно или несколько буксируемых сейсмических устройств выбирают из сейсмического устройства-источника, подгруппы сейсмических устройств-источников, сейсмической буксируемой косы, паравана или отклонителя.
| US 20140247691 A1 04.09.2014 | |||
| Устройство для механической ломки и выволочки садочной соли | 1930 |
|
SU21094A1 |
| US 20100149910 A1 17.06.2010 | |||
| US 20120067265 A1 22.03.2012 | |||
| WO 9730361 A1 21.08.1997 | |||
| Устройство для автоматического регулирования глубины погружения буксируемого в воде объекта | 1978 |
|
SU938755A3 |
| Устройство для управления буксируемым подводным объектом | 1979 |
|
SU775974A1 |

