Настоящее изобретение относится к технике для сейсмических исследований и к сейсмическому отображению подповерхностных слоев. В частности, но не исключительно, относится к аппаратам для подводных сейсмических исследований.
В обычных сейсмических методах исследования подземных слоев под морским дном используют возбуждение сейсмической волны и измерение отклика от подземного слоя. Сейсмическая волна может быть простой или сложной и может образоваться на уровне моря, под поверхностью воды или на морском дне. Отклик фиксируют несколько разнесенных приемников, которые могут быть расположены на кабелях или "сейкосах", буксируемых ниже морской поверхности за исследовательским судном, они могут также быть расположены на дне моря. При размещении приемников стационарно на морском дне после этапа детектирования может потребоваться переместить их в другое место для повторения процесса или извлечь, если исследование завершено.
Отклик на сейсмическую волну в твердой скальной породе на донной поверхности включает продольную волну (Р-волна) и поперечные волны (S-волны). Считается, что Р-волны хорошо подходят для формирования изображения структур, а комбинация S-волн хорошо подходит для определения характеристик скальных пород и флюидов. Р-волны проходят через скальную породу и морскую воду, в то время как S-волны проходят только через скальную породу. Таким образом, если приемники будут гидрофонами, расположенными на поверхности или ниже, то они обнаружат только Р-волны. Чтобы обнаружить S-волны, необходимо использовать гидрофон, расположенный на морском дне.
Установлено, что наилучшее сейсмическое изображение может быть получено при использовании Р- и S-волн в так называемом 4С-сейсмическом изображении, где 4С обозначает "четыре компонента": одна Р-волна и три S-волны. Для эффективного обнаружения S-волн требуются три независимых ортогональных стационарных гидрофона в каждом месте регистрации. Однако недавно стало возможно использовать детектирующий аппарат, расположенный на небольшом расстоянии от морского дна, который контролирует перемещение частиц на поверхности земли и обнаруживает обе Р- и S-волны, например, таким является детектирующий аппарат, описанный в WO 2004/003589.
В WO 2004/003589 описаны приборы под названием «Устройства для записи колебаний морского дна» (ОВМ), они обнаруживают Р-волны и S-волны при расположении на небольшом расстоянии от морского дна путем измерения отклика частиц на морском дне на сейсмические волны.
4С-сейсмическое изображение нижнего горизонта может дать дополнительную и лучшую информацию для исследований благодаря высококачественной записи S-волн на дне моря. К сожалению, 4С-изображение имеет такие недостатки, как высокая стоимость исследования, переменные результаты и неопределенность при прогнозировании результатов. Это связано с тем, что размещение и перемещение в другое место гидрофонов на морском дне было очень дорогостоящим и неточным.
Авторы настоящего изобретения установили, что эффективность выполнения сейсмического изображения может быть улучшена, если будет доступен метод, обеспечивающий непрерывное управляемое движение соответствующих приемников Р- и S-волны относительно морского дна. Однако дистанционное детектирование над морским дном имеет проблемы, связанные с тем, что детектирующие аппараты подвергаются воздействию океанских течений, что оказывает отрицательное влияние на эффективное позиционирование аппарата и вносит в измерения шумы, делая корреляцию результатов затруднительной.
Известные в настоящее время сейсмокосы сконструированы для буксировки немного ниже уровня моря и управляются в боковом направлении. В некоторых системах глубина погружения сейсмокосы регулируема и может достигать нескольких метров ниже уровня моря. Такие системы не являются подходящими для использования вблизи морского дна на большой глубине, и их не легко развертывать в таких местах.
В связи с этим объектом изобретения является создание аппарата для подводных исследований, для которого не требуется поднимать, перемещать и изменять положение датчиков строго на морском дне, для чего используется буксирование приемников на регулируемой глубине на небольшом расстоянии над морским дном.
Настоящее изобретение обеспечивает систему, которая включает исследовательское судно; по меньшей мере, одну сейсмокосу, причем сейсмокоса выполнена с возможностью буксирования судном: сейсмокоса связана с детектирующей аппаратурой, контроллером глубины погружения и, по меньшей мере, одним задатчиком высоты над дном и системой управления, контроллер глубины погружения и по меньшей мере один задатчик высоты над дном выполнены с возможностью удерживания сейсмокосы в положении вблизи морского дна при ее буксировании судном; детектирующая аппаратура выполнена с возможностью обнаружения и записи данных при движении сейсмокосы относительно морского дна во время ее буксирования судном.
Изобретение особенно применимо для сейсмических исследований, но также может применяться для любого типа исследований, которые могут получить преимущества при таком управляемом буксировании приборов для исследований. Например, такой аппарат с успехом может применяться при исследованиях, которые определяют местонахождение потенциальных месторождений, инородных объектов около морского дна, загрязнителей.
Сейсмокоса является буксируемым аппаратом, приспособленным для работы под высоким давлением. Детектирующая аппаратура может включать приборы для обнаружения Р- и S -волн, например, гидрофоны для обнаружения волны Р-волн в воде, и детектирующую аппаратуру такого типа, как описанная в WO 2004/003589, для обнаружения Р- и S-волн на морском дне (ОВМ). Число и положение приборов зависит от выполняемых исследований. Детектирующая аппаратура может содержать средства для компенсации собственного движения, когда производится детектирование и запись данных.
Сейсмокоса может быть короткой, например длиной 50 м, невращающиеся секции расположены непосредственно после, за или между последовательными частями оборудования, прикрепленными к сейсмокосе, такими как приборы и задатчики высоты над дном. Невращающиеся секции могут быть оснащены продольными крыльями, чтобы предотвратить вращение сейсмокосы. Навивка покрытия кабеля должна быть выполнена так, чтобы изменение нагрузки не вызывало поворота. Сейсмокоса может также включать модули изоляции вибрации (VIM-МИВ) для уменьшения шума в данных.
Система согласно изобретению позволяет разворачивать сейсмокосы на глубине до несколько тысяч метров ниже уровня моря, при этом глубина погружения сейсмокос регулируемая. Множество сейсмокос может буксироваться в одной группе. Длина каждой сейсмокосы может составлять от 3000 до 8000 м, например 5000 м. Схема буксировки сейсмокос диктуется характером предпринимаемых исследований и может быть приспособлена для учета батиметрических данных в области исследования.
Исследовательское судно предпочтительно оборудуется по крайней мере одной лебедкой буксировки и забортной лебедочной системой для опускания, буксирования и подъема из глубины сейсмокосы (сейсмокос). Условия в исследуемой области влияют на оптимальную длину, ширину, число приборов и глубину исследования группы сейсмокос, которые в свою очередь определяют природу и число элементов требующегося буксировочного оборудования.
Судно предпочтительно снабжено GPS и гидроакустическим устройством позиционирования, которое является, предпочтительно, многолучевым.
Каждая сейсмокоса снабжена определенными элементами оборудования. Глубина погружения переднего конца сейсмокосы регулируется контроллером глубины, который является предпочтительно многокорпусным маневренным регулятором глубины погружения и в рабочем состоянии имеет оптимальное положение от 50 до 100 м над морским дном в зависимости от ландшафта. Контроллер глубины может быть, необязательно, однокорпусным регулятором глубины погружения в зависимости от требований приборов и условий исследования.
Предпочтительно, каждая сейсмокоса прикреплена с помощью кабеля к отдельному маневренному контроллеру глубины, который обеспечивает независимое регулирование глубины погружения каждой сейсмокосы. Контроллер глубины является активно управляемым устройством и может выполнять вертикальное и горизонтальное маневрирование. Альтернативно или дополнительно могут быть применены дополнительные отдельные элементы оборудования, которые влияют на горизонтальное перемещение сейсмокосы при ее использовании, такие как оборудование типа паравана.
Контроллер глубины может быть снабжен рулевыми поверхностями, включая регулируемые крылья, руль баланса и руль направления. Предпочтительно он может быть снабжен датчиком глубины, высотомером, волоконно-оптической системой, гироскопом, высотомером, гидроакустическими транспондерами позиционирования и/или альтернативными устройствами контроля положения и/или скорости, такими как видеокамеры. Имеется также система управления контроллера глубины, которая может сообщаться с главной системой управления, и блок распределения мощности контроллера глубины для активации рулевых поверхностей контроллера глубины, когда это необходимо.
Основные цели контроллера глубины состоят в том, чтобы опускать сейсмокосу как можно ближе к морскому дну, с обеспечением безопасного проведения исследований с учетом окружающего ландшафта и обеспечивая горизонтальное управление сейсмокосой. Контроллером глубины можно управлять активно, обеспечивая мягкий спуск или подъем, который может быть скомбинирован с подъемом или погружением с помощью буксировочной лебедки, позволяя безопасно выполнять исследования в направлениях к материку и от него. Высотомер в контроллере глубины обеспечивает часть входной информации для определения безопасной высоты для задатчика высоты положения сейсмокосы над дном. В этой роли высотомер контроллера глубины действует, как устройство раннего обнаружения и предупреждения, и помогает предотвратить ненужные погружения и подъемы.
Сейсмокоса может также быть выполнена с балластом для того, чтобы облегчить погружение подводной секции системы, и с системой выброса балласта, которая активируется акустически, позволяя выполнить подъем подводной системы в чрезвычайной ситуации.
Сейсмокоса предпочтительно оснащена одним или более задатчиками высоты, прикрепленными с интервалами вдоль косы. Интервал между каждой парой задатчиков высоты, расположенных последовательно, может составлять от 200 до 500 м, например 250 м.
Задатчики высоты предпочтительно имеют форму крылатой рыбки, которая может быть однокорпусной или многокорпусной. Задатчики высоты более точно управляются, чем контроллеры глубины, и могут использоваться для уменьшения любого вращения сейсмокосы, а также для удерживания ее на расстоянии от 2 до 50 м над морским дном во время исследований, предпочтительно, от 5 до 30 м или от 5 до 20 м выше морского дна. Для использования определенных инструментов, позволяющих обнаружить Р- и S-волны, требуется, чтобы сейсмокоса находилась как можно ближе ко дну моря, но без риска повреждения приборов.
Минимальное число и оптимальное число задатчиков высоты, требующихся для сейсмокосы, зависят от ее длины, морских течений и других рабочих условий. Каждый задатчик предпочтительно оснащают гидроакустическим устройством позиционирования и/или альтернативными устройствами контроля положения и/или скорости, такими как камеры, а также системой управления задатчика высоты, которая может обмениваться информацией с системой управления контроллера глубины и с главной системой управления прямо или через систему управления контроллера глубины. Каждый задатчик высоты также снабжен системой управления для активации рулевых поверхностей, когда это требуется. Каждый задатчик высоты содержит ряд приборов, которые обеспечивают данными систему управления и которые могут также сохранять данные в задатчике высоты, приборы, измеряющие данные, включая данные батиметрии и каротажные данные по доплеровской скорости.
Кроме того, любой из элементов оборудования, относящегося к сейсмокосе, включая например задатчики высоты и детектирующее оборудование, может также нести вспомогательную измерительную аппаратуру, предназначенную для записи данных, касающихся любого из следующих параметров: давление воды, температура, глубина, концентрация солей, скорость подводных течений, колебания сейсмокосы, колебания исследовательских приборов, коэффициент отражения поверхности морского дна (используя, например, белый свет или лазерный свет), геометрия профиля буксировки.
Система управления предпочтительно состоит из главной системы управления и ряда вспомогательных систем. Мультиплексор может использоваться для поддержания связи между подводными секциями системы и системами управления, находящимися на поверхности. Главная система управления получает входную информацию от GPS и эхолота судна, контроллера(ров) глубины, гидроакустических приборов позиционирования, батиметрические и скоростные данные от подводных устройств. Главная система управления выдает команды для системы управления лебедкой и всех систем управления для подводных устройств, чтобы регулировать высоту и глубину погружения сейсмокосы (сейсмокос) до, во время и после исследований и предотвращать столкновение сейсмокосы с морским дном.
Системой управления лебедки управляет главная система управления, но дополнительно возможно ручное управление в случае чрезвычайной ситуации.
Система управления контроллера глубины предпочтительно вводит данные от датчиков положения на контроллере глубины в главную систему управления. На основе этих данных и другой информации главная система управления может тогда взаимодействовать с системой управления контроллера глубины, которая выдает команды для рулевых поверхностей контроллера глубины, чтобы удерживать контроллер глубины в горизонтальной плоскости и оптимизировать регулировку глубины погружения.
Управление крыльями контроллера глубины, предпочтительно, связано с управлением лебедкой так, что, если требуется быстрый подъем, лебедке выдается команда на подъем с максимальной скоростью, одновременно рулевые поверхности контроллера глубины наклоняются в положение, при котором сила опускания минимальна, для быстрого подъема. Контроллер глубины может также содержать балласт, который может быть сброшен, если необходим быстрый подъем в чрезвычайной ситуации.
Каждой системе управления задатчика высоты предварительно задается значение высоты, которое она должна поддерживать, как соответствующее окружающему ландшафту и любым препятствиям при буксировке. Используя топографию ниже контроллера глубины, главная система управления может выдавать команды системам управления задатчиков высоты через систему управления контроллера глубины, чтобы предотвратить столкновение сейсмокосы с морским дном.
Настоящее изобретение также обеспечивает способ проведения подводных исследований, способ включает этапы буксирования, по крайней мере, одной сейсмокосы позади исследовательского судна, причем сейсмокоса связана с детектирующей аппаратурой, контроллером глубины, задатчиком высоты и системой рулевого управления; поддерживания сейсмокосы в положении вблизи дна моря, используя контроллер глубины и задатчик высоты, при буксировании сейсмокосы судном; управления направлением движения сейсмокосы, используя систему рулевого управления; и детектирования и записи информации с использованием детектирующей аппаратуры, в то время как сейсмокоса находится в движении относительно морского дна при буксировании ее судном. Предпочтительно, способ дополнительно включает возбуждение сейсмической волны с использованием морского сейсмического источника. Тип источника и метод, который используется, будет зависеть от географии области исследований и типа выполняемого исследований.
Таким образом, согласно настоящему изобретению можно измерить небольшие перемещения и сейсмические волны, включая и Р- и S-волны, на морском дне при перемещении аппарата в воде над морским дном.
Предоставление возможности использования морских сейсмокос, а не стационарных датчиков на морском дне означает, что относительно большие морские площади могут быть исследованы в относительно короткое время и более рентабельно.
Изобретение может быть использовано на практике разными путями, один из вариантов осуществления будет описан ниже, с использованием соответствующих чертежей.
Фиг.1 - принципиальная схема исследовательской системы в соответствии с изобретением;
фиг.2 - пример контроллера глубины погружения;
фиг.3 - пример задатчика высоты.
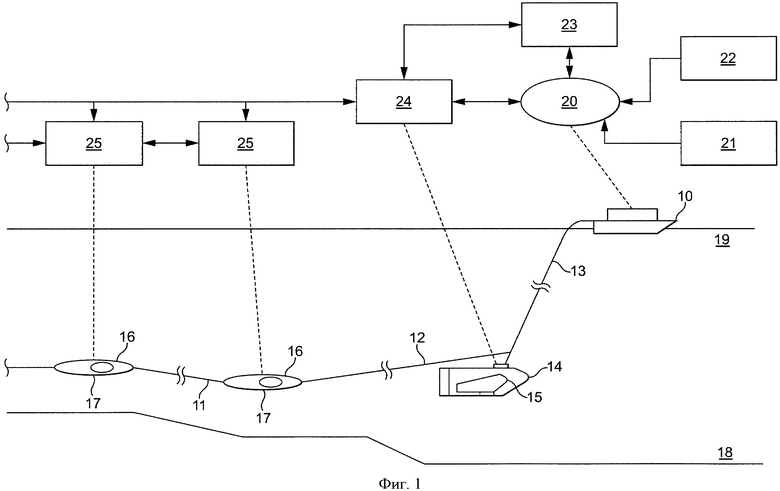
На фиг.1 показана исследовательская система в соответствии с изобретением. Исследовательская система включает судно 10 на уровне 19 моря, которое буксирует сейсмокосу 11, прикрепленную кабелем 12 к буксировочному тросу 13. Буксировочный трос 13 может быть оборудован одним или более приспособлениями (не показаны), «смягчающими» потоки, приспособления могут быть расположены через равные промежутки вдоль буксировочного троса и служат для подавления колебаний троса в связи с турбулентностью, возникающей при буксировании. Приспособления могут быть выполнены в виде пластин клиновидной формы, прикрепленных к тросу. Такие приспособления могут способствовать снижению шума при проведении исследований благодаря уменьшению колебаний в системе, прикрепленной к буксировочному тросу. Сейсмокоса 11 содержит сейсмическую детектирующую аппаратуру (не показана). Глубина погружения сейсмокосы 11 регулируется многокорпусным регулятором 14 глубины погружения и задатчиками 16 высоты, которые расположены вдоль длины сейсмокосы 11. Расстояние от многокорпусного регулятора 14 глубины погружения до самого дальнего от регулятора 14 задатчика высоты около 5000 м. Задатчики 16 высоты размещены через каждые 500 м вдоль длины сейсмокосы 11. Кабель 12 имеет длину приблизительно 250 м и буксировочный трос 13 около 150 м длины. Сейсмокоса 11 снабжена плавучими якорями (не показаны) на конце, удаленном от многокорпусного регулятора глубины погружения, для стабилизации положения сейсмокосы.
Глубина погружения сейсмокосы 11 регулируется с помощью многокорпусного регулятора 14 глубины погружения, который может выполнять независимые маневрирования. Регулируемые рулевые поверхности регулятора глубины погружения включают крылья 15, а также балансный руль и руль направления (не показаны). Регулятор снабжен датчиком глубины, высотомером, датчиком положения и гидроакустическими транспондерами позиционирования.
После того как регулятор 14 глубины погружения вывел сейсмокосу 11 в положение вблизи морского дна 18, задатчики 16 высоты поддерживают и осуществляют небольшие коррекции положения сейсмокосы 11 по высоте над морским дном 18. Имеется десять независимых задатчиков 16 высоты (восемь не показаны), расположенных с равными промежутками вдоль сейсмокосы 11 для управления положением сейсмокосы по всей длине. Каждый задатчик высоты использует рулевые поверхности 17 для удерживания высоты сейсмокосы и выполнения небольших корректировок.
Система рулевого управления сейсмокосой координируется главной системой управления 20 исследовательского судна 10, которая получает данные от GPS-системы 21 и от эхолота 22 судна. Главная система управления 20 также получает данные от системы 23 управления лебедки, системы управления регулятора 24 глубины погружения и систем 25 управления задатчиков высоты, которые в этом воплощении изобретения взаимодействуют с главной системой управления через систему управления регулятора глубины погружения. Системы 25 управления задатчиками высоты также взаимодействуют непосредственно одна с другой, чтобы удерживать глубину погружения сейсмокосы 11 на необходимом уровне.
Система 23 управления лебедкой, система 24 управления регулятора глубины погружения и системы 25 управления задатчиками высоты управляются главной системой 20 управления для безопасного погружения, буксирования и подъема сейсмокосы 11 и соединенных с ней устройств, предназначенных для исследований.
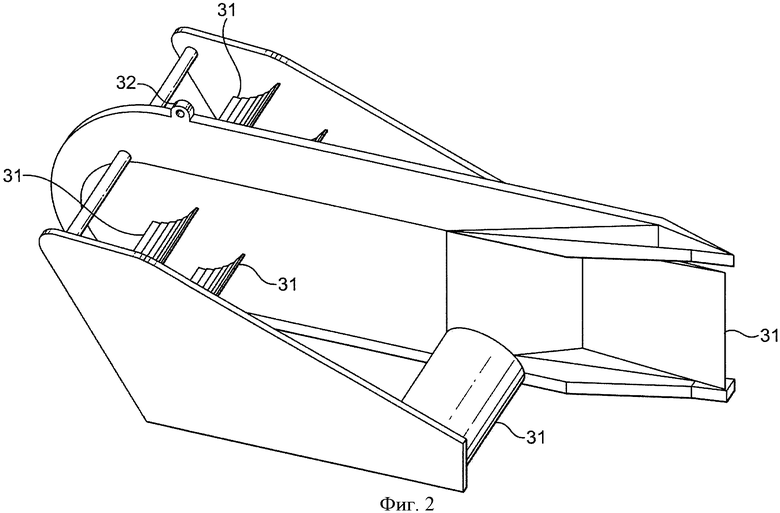
Фиг.2 показывает контроллер глубины погружения, подходящий для использования в системе, согласно настоящему изобретению, в виде регулятора глубины погружения. Регулятор 30 глубины погружения оснащен рулевыми поверхностями 31, способными изменять положение регулятора глубины погружения в воде. Регулятор глубины погружения имеет буксировочную точку 32, от которой он может присоединяться к буксирующему судну, например, буксировочным тросом (фиг.1). Регулятор глубины погружения также оснащен приборами, ранее описанными, и системой управления (не показана).
Фиг.3 показывает задатчик высоты, подходящий для использования в системе согласно настоящему изобретению, который имеет форму крылатой буксируемой рыбки. Буксируемая рыбка 40 содержит две части приблизительно симметричной формы, которые снабжены рулевыми поверхностями 41. Две части буксируемой рыбки 40 разделены щелью 42 и присоединены одна к другой только в узле 44 крепления, приблизительное положение которого отмечено. Когда буксируемая рыбка используется, трос 43 заводится в щель 42 и присоединяется к буксируемой рыбке в узле 44 крепления. Буксируемая рыбка также снабжена соответствующей аппаратурой, упоминавшейся выше, и системой управления (не показаны).
Следует принять во внимание, что существует множество альтернативных способов для работы систем управления, чтобы регулировать глубину погружения подводной секции исследовательской системы. Оборудование, требующееся для поддержания глубины погружения сейсмокосы, может также варьироваться и зависеть от области исследований и типа выполняемых исследований. Детектирующая аппаратура, связанная с каждой сейсмокосой, также будет зависеть от типа выполняемых исследований. Множество типов датчиков может использоваться для получения характеристик месторождения, включая магнитные датчики и приборы для регистрации Р- и S-волн.
| название | год | авторы | номер документа |
|---|---|---|---|
| Буксируемое устройство | 2018 |
|
RU2688634C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОДВОДНО-ПОДЛЕДНОЙ СЕЙСМОАКУСТИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ЛЕДОКОЛЬНОГО СУДНА И КОМПЛЕКСА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562747C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ СЕЙСМИЧЕСКИМИ КОСАМИ | 2009 |
|
RU2516591C2 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| СЕЙСМОГРАФИЧЕСКОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2589242C1 |
| ГРУППА ИСТОЧНИКОВ ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2017 |
|
RU2739725C2 |
| Автоматическое устройство для развертывания и свертывания донной антенны под водой и под ледовым покровом | 2016 |
|
RU2640896C1 |
Настоящее изобретение относится к технике сейсмических исследований и сейсмическому изображению подземных слоев, в частности к аппарату для сейсмических исследований близи морского дна. Аппарат содержит контроллер глубины погружения сейсмокосы и, по меньшей мере, один задатчик высоты, прикрепленные с интервалами вдоль длины буксируемой сейсмокосы. Сейсмокоса несет приемники для измерения, например, Р- и S-волн. Технический результат: аппарат позволяет осуществлять регулируемое по глубине буксирование сейсмоприемников на небольшом расстоянии над морским дном. 3 н. и 14 з.п-лы, 3 ил.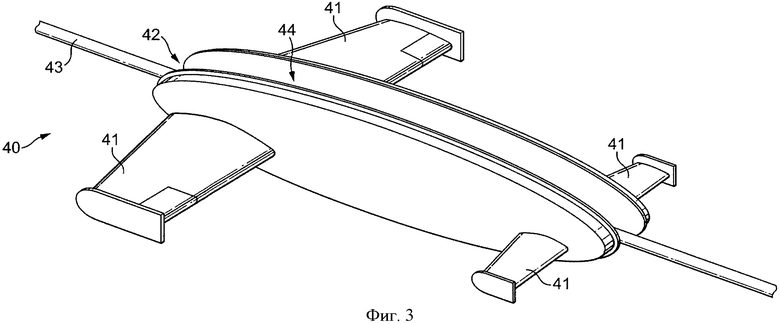
1. Подводная исследовательская сейсмическая система для использования при подземных сейсмических исследованиях, содержащая исследовательское судно и по меньшей мере одну сейсмокосу, выполненную с возможностью буксирования судном; причем сейсмокоса связана с детектирующей аппаратурой, контроллером глубины погружения, по меньшей мере одним задатчиком высоты и системой рулевого управления; при этом контроллер глубины погружения и указанный по меньшей мере один задатчик высоты выполнены с возможностью удерживания сейсмокосы в положении вблизи морского дна при буксировании ее судном; при этом контроллер глубины погружения является активно управляемым устройством и обеспечивает вертикальное и горизонтальное маневрирование, а указанный по меньшей мере один задатчик высоты выполнен с возможностью поддержания положения и осуществления коррекции положения сейсмокосы по высоте над морским дном; детектирующая аппаратура выполнена с возможностью приема и записи данных, когда сейсмокоса находится в движении относительно морского дна при ее буксировании судном.
2. Подводная исследовательская система по п.1, в которой контроллер глубины погружения представляет собой регулятор глубины погружения.
3. Подводная исследовательская система по п.2, в которой контроллер глубины погружения связан с датчиком глубины погружения, высотомером, датчиком высоты и гидроакустическими транспондерами позиционирования.
4. Подводная исследовательская система по п.3, в которой исследовательское судно снабжено лебедкой, системой забортных шкивов, GPS-системой и системой многолучевого эхолокатора.
5. Подводная исследовательская система по п.1, в которой система содержит множество сейсмокос.
6. Подводная исследовательская система по п.1, в которой задатчики высоты размещены на конце каждой сейсмокосы, удаленном от исследовательского судна, и в средней точке каждой сейсмокосы.
7. Подводная исследовательская система по п.1, характеризующаяся тем, что дополнительно содержит сейсмический источник.
8. Подводная исследовательская система по п.1, в которой система рулевого управления сейсмокосы содержит вспомогательные системы управления, связанные с каждым устройством в исследовательской системе, главную систему управления, расположенную на исследовательском корабле, которая координирует вспомогательные системы управления, и мультиплексор, выполненный с возможностью осуществлять связь между подводными вспомогательными системами управления и главной системой управления.
9. Подводная исследовательская система по п.1, в которой детектирующая аппаратура включает один или более приборов, выбранных из группы, содержащей устройства для записи колебаний морского дна, гидрофоны и геофоны.
10. Подводная исследовательская система по п.1, в которой детектирующая аппаратура содержит средства для компенсации собственного движения при приеме и записи информации.
11. Подводная исследовательская система по п.1, в которой сейсмокоса выполнена с возможностью расположения на глубине от 2 до 50 м над морским дном во время приема и записи информации с использованием детектирующей аппаратуры.
12. Способ проведения подводных сейсмических исследований, включающий этапы: буксирования по меньшей мере одной сейсмокосы за исследовательским судном; при этом сейсмокоса содержит связанную с ней детектирующую аппаратуру, контроллер глубины погружения, задатчик высоты и систему рулевого управления; удерживания сейсмокосы в положении вблизи морского дна с использованием контроллера глубины погружения и задатчика высоты, когда сейсмокоса буксируется судном; при этом контроллер глубины погружения является активно управляемым устройством и обеспечивает вертикальное и горизонтальное маневрирование, а указанный по меньшей мере один задатчик высоты выполнен с возможностью поддержания и осуществления коррекции положения сейсмокосы по высоте над морским дном; а также этапы управления направлением движения сейсмокосы при использовании системы рулевого управления; и приема и записи информации с использованием детектирующей аппаратуры, когда сейсмокоса находится в движении относительно морского дна при буксировании ее судном.
13. Способ проведения подводных исследований по п.12, в котором указанное положение сейсмокосы представляет собой высоту от 2 до 5 м над морским дном.
14. Способ проведения подводных исследований по любому из пп.12 или 13, в котором указанное положение сейсмокосы по высоте над морским дном поддерживается постоянным, насколько это возможно.
15. Способ проведения подводных исследований по п.12, характеризующийся тем, что дополнительно включает этапы, на которых генерируют сейсмическую волну с использованием сейсмического источника и детектируют отклик.
16. Способ проведения подводных исследований по п.12, характеризующийся тем, что дополнительно включает этап использования указанной информации для подготовки отчета об исследованиях.
17. Способ определения профилей буксирования сейсмокос, подходящих для подводной сейсмической исследовательской системы по п.1, характеризующийся тем, что используют информацию о морском дне, включающую информацию о глубине и изменчивости глубины.
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2072534C1 |
| US 4942557 A, 17.07.1990 | |||
| ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ С РАСШИРЕННЫМ ДИАПАЗОНОМ АКТИВНОЙ РАБОТЫ | 2007 |
|
RU2331971C1 |
| Регулятор глубины погружения сейсмоприемной косы | 1989 |
|
SU1728825A1 |
| Приспособление для прикрепления косы к косовищу | 1927 |
|
SU9533A1 |
| НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2121133C1 |
| СПОСОБ МОРСКОЙ МНОГОВОЛНОВОЙ МНОГОКОМПОНЕНТНОЙ СЕЙСМОРАЗВЕДКИ | 2003 |
|
RU2246122C1 |

