Изобретение относится к довольно широкой сфере применения, а именно к геологии, строительству и архитектуре, медицине, робототехнике, фотовидеотехнике, киноиндустрии, управлению движением транспорта.
Известен способ получения сферической перспективы методом определителя (Ткач Д.И., Голубь В.И. «Графическая технология построения сферической перспективы на плоскости.» / Прикладная геометрия и инженерная графика, выпуск 59. - К.: КГТУСА, 1996). В основе известного способа лежит графическая технология преобразования исходных ортогональных проекций объекта в его сферическую перспективу с помощью графических операций, а именно вторичную проекцию на плоскость первичной центральной проекции объекта из центра сферической картины на ее поверхность. Методика этого способа базируется на конструктивных особенностях сферической поверхности, которая, вращаясь вокруг вертикальной оси, остается позиционно неподвижной. В связи с этим любые соосные с нею поверхности будут пересекаться с нею по горизонтальным параллелям, которые будут ортогонально проецироваться на вертикальную плоскую картину в горизонтальные прямые, которые берут свое начало в точках пересечения их картинных очерков. Графическая конструкция в этом способе является определителем любой сферической перспективы любого объекта.
Погрешностью известного способа является невозможность решения обратной задачи.
По наличию сходных технических признаков известного способа и заявляемого технического решения принимаем известный способ за прототип.
Задачей заявляемого технического решения является получение координат движения различных механизмов, в том числе и в робототехнике.
Поставленная задача решается с помощью предлагаемого способа, который не содержит перечня замеров и откладываний, а базируется на плоско параллельных перемещениях в условиях замены плоскостей проекций.
На фигуре графически представлен алгоритм построения плана и фасада из сферической перспективы.
Для пояснения осуществления способа и его графической части представлен алгоритм последовательно выполняемых операций.
1. Принимая во внимание единство масштаба фокусного расстояния объектива (радиуса окружности сферических координат) и размеров кадра, совмещаем центры изображения и координат.
2. Получив посредством эллипсов, через точки объекта, систему горизонтальных и вертикальных координат, строим пучки лучей, точек зрения и след картинной поверхности с координатами.
3. Посредством подбора вариантов плана в горизонтальной проекции добиваемся перпендикулярности прямой основания и вертикалей во фронтальной проекции.
4. Добившись соответствия точек в обеих проекциях, получаем ортогональные чертежи с размерами (при размещении единицы масштаба в фотографии объекта).
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для построения проекций объекта | 1981 |
|
SU971684A1 |
| СПОСОБ ИЗОБРАЖЕНИЯ ПРЕДМЕТОВ (ВАРИАНТЫ) | 2003 |
|
RU2241258C2 |
| Прибор для построения панорамной перспективы | 1974 |
|
SU517520A1 |
| СПОСОБ КАЛИБРОВКИ ОПТИЧЕСКОЙ СИСТЕМЫ | 2008 |
|
RU2381474C2 |
| Способ определения планового положения точек объекта и устройство для его осуществления | 1981 |
|
SU979852A1 |
| СИСТЕМА И СПОСОБ МОДЕЛИРОВАНИЯ И КАЛИБРОВКИ УСТРОЙСТВА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2677562C2 |
| Прибор для построения плана изображения по его перспективе | 1945 |
|
SU68266A1 |
| Прибор для построения перспективного изображения по его плану и фасаду | 1947 |
|
SU78784A1 |
| Способ формирования цифрового панорамного изображения | 2016 |
|
RU2654127C1 |
| Прибор для построения перспективных изображений объекта по двум ортогональным проекциям комплексного чертежа | 1980 |
|
SU977219A1 |
Изобретение относится к геологии, строительству и архитектуре, медицине, робототехнике, фотовидеотехнике, киноиндустрии, управлению движением транспорта. Техническим результатом является расширение функциональных возможностей за счет получения ортогональных чертежей из каждой отдельной фотографии архитектуры. Способ распознавания геометрически организованных объектов на основе графической технологии построения сферической перспективы на плоскости не содержит перечня замеров и откладываний, а базируется на плоско параллельных перемещениях в условиях замены плоскостей проекций. 1 ил.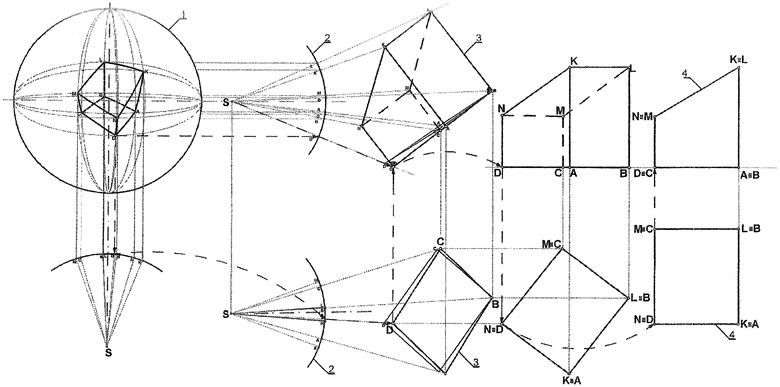
Способ распознавания геометрически организованных объектов на основе графической технологии построения сферической перспективы на плоскости, отличающийся тем, что способ базируют на плоскопараллельных перемещениях в условиях замены плоскости проекций, при этом ввиду единства масштаба фокусного расстояния объектива (радиуса круга сферических координат) и размеров кадра совмещают центры изображения и координат, после чего, получив с помощью эллипсов через точки объекта систему горизонтальных и вертикальных координат, строят пучки лучей, точек зрения и след картинной поверхности с координатами, потом с помощью подбора вариантов основания в горизонтальной проекции добиваются перпендикулярности прямой основания и вертикалей во фронтальной проекции, а достигнув соответствия точек в обеих проекциях, получают ортогональные чертежи с размерами (при размещении единицы масштаба в фотографии объекта).
| US 6486908 В1, 26.11.2002 | |||
| Плоскопараллельное перемещение | |||
| Вращение | |||
| Замена плоскостей проекций (http://web.archive.org/web/20100130002030/http://ngeom.ru/teorgeom.html) | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПОНОВКИ ЛАНДШАФТНЫХ ПАНОРАМНЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2384882C1 |
| СПОСОБ УПРАВЛЕНИЯ КУРСОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2275674C2 |
| СПОСОБ ПРОЕКЦИИ ИЗОБРАЖЕНИЙ | 1991 |
|
RU2016410C1 |
| Ходуля | 1989 |
|
SU1621977A1 |
| Способ определения аденилаткиназной активности сыворотки крови | 1981 |
|
SU983543A1 |

