Изобретение относится к бортовым системам автоматического управления летательными аппаратами (ЛА).
Известна система управления углом тангажа летательного аппарата, содержащая датчик угловой скорости, задатчик сигнала тангажа, датчик углового положения, блок сравнения, интегрирующий и суммирующие усилители, ограничители сигнала (см. патент RU 2310899 С1, 25.05.2006). Недостатком данной системы управления является большое перерегулирование в переходных процессах при отработке заданной команды угла тангажа.
Наиболее близким к данному изобретению, принятым за прототип, является система управления углом тангажа ЛА, которая содержит датчик угловой скорости, задатчик сигнала тангажа, датчик углового положения, блок сравнения, интегратор, блоки усилителей, сумматор, усилитель рулевой машины, рулевую машину с обратной связью и руль высоты, при этом первый вход блока сравнения соединен с выходом датчика углового положения, второй вход блока сравнения соединен с выходом задатчика сигнала тангажа, выход блока сравнения через блок усилителя Кϑ соединен с первым входом сумматора, второй вход сумматора через блок усилителя Кω соединен с выходом датчика угловой скорости, третий вход сумматора, подключен через блок усилителя К∫ и интегратор к выходу блока сравнения, выход сумматора через усилитель рулевой машины соединен с входом рулевой машины, выход рулевой машины соединен с входом руля высоты и через обратную связь подключен к четвертому входу сумматора (И.А.МИХАЛЕВ, c.174 и др. «Системы автоматического управления самолетом». - М.: Машиностроение, 1987 г.).
Недостатком этой системы управления является большое перерегулирование в переходных процессах при отработке заданной команды угла тангажа и связанное с этим увеличение потребной мощности привода органа управления.
Техническим результатом заявленного изобретения является уменьшение перерегулирования в переходных процессах при отработке заданной команды угла тангажа и связанное с этим уменьшение потребной мощности привода органа управления.
Для достижения технического результата в системе управления углом тангажа, содержащей датчик угловой скорости, задатчик сигнала тангажа, датчик углового положения, блок сравнения, интегратор, блоки усилителей, сумматор, усилитель рулевой машины, рулевую машину с обратной связью и руль высоты, первый вход блока сравнения соединен с выходом датчика углового положения, второй вход блока сравнения соединен с выходом задатчика сигнала тангажа, второй вход сумматора через блок усилителя Кω соединен с выходом датчика угловой скорости, третий вход сумматора, подключен через блок усилителя К∫ и интегратор к выходу блока сравнения, выход сумматора через усилитель рулевой машины соединен с входом рулевой машины, выход рулевой машины соединен с входом руля высоты и через обратную связь подключен к четвертому входу сумматора, согласно изобретению выход датчика углового положения через блок усилителя Кϑ соединен с первым входом сумматора.
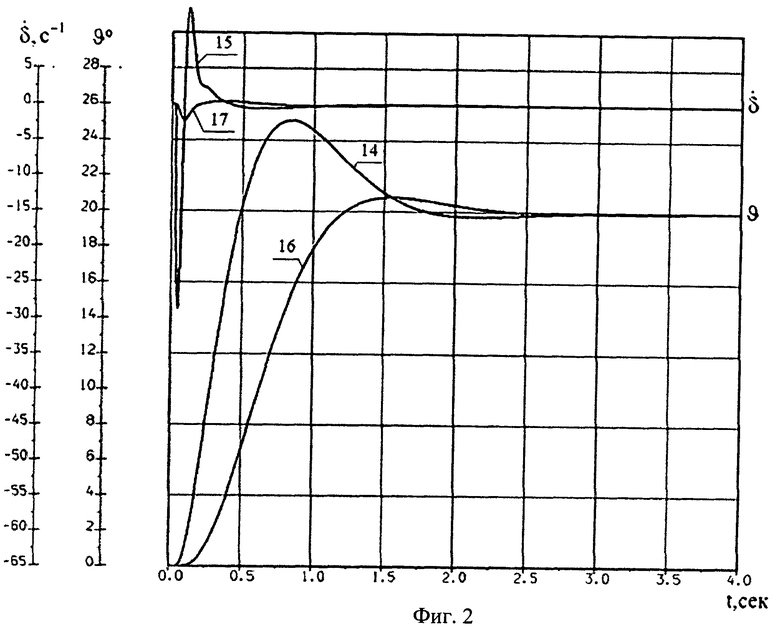
На фиг.1 показана структурная схема предлагаемой системы управления углом тангажа ЛА.
На фиг.2 показаны переходные процессы при отработке заданного значения угла тангажа и изменение скорости руля высоты в случае использования управляющих сигналов представленых в заявленном изобретении и в прототипе.
Предлагаемая система управления углом тангажа ЛА (фиг.1) содержит датчик угловой скорости 1, задатчик сигнал тангажа 2, датчик углового положения 3, блок сравнения 4, интегратор 5, блоки усилителей Кϑ 6, Кω, 7 и К∫ 8, сумматор 9, усилитель рулевой машины 10, рулевую машину 11 с обратной связью 12 и руль высоты 13, при этом первый вход блока сравнения 4 соединен с выходом датчика углового положения 3, второй вход блока сравнения 4 соединен с выходом задатчика сигнала тангажа 2, выход датчика углового положения 3 через блок усилителя Кϑ 6 соединен с первым входом сумматора 9, второй вход сумматора 9 через блок усилителя Кω 7 соединен с выходом датчика угловой скорости 1, третий вход сумматора 9 подключен через блок усилителя К∫ 8 и интегратор 5 к выходу блока сравнения 4, выход сумматора 9 через усилитель рулевой машины 10 соединен с входом рулевой машины 11, выход рулевой машины 11 соединен с входом руля высоты 13 и через обратную связь 12 подключен к четвертому входу сумматора 9.
Система управления углом тангажа ЛА работает следующим образом.
Сигнал угловой скорости (ωz), измеренный датчиком угловой скорости 1, поступает через блок усилителя Кω 7 на второй вход сумматора 9. Начальное значение угла тангажа ϑ, измеренное датчиком углового положения 3, поступает на первый вход блока сравнения 4 и через блок усилителя Кϑ 6 на первый вход сумматора 9. С задатчика 2 сигнал тангажа (ϑзад) поступает на второй вход блока сравнения 4. На выходе блока сравнения 4 формируется сигнал рассогласования по тангажу (Δϑ), который поступает через интегратор 5 и блок усилителя К∫ 8 на третий вход сумматора 9. На выходе сумматора 9 формируется управляющий сигнал:

В сумматоре 9 формируется сигнал рассогласования между управляющим сигналом и сигналом с выхода обратной связи 12, который через усилитель рулевой машины 10 поступает на вход рулевой машины 11. Рулевая машина 11 отклоняет руль высоты 13, в результате происходит изменение углового положения летательного аппарата.
Передаточная функция заявляемой системы управления углом тангажа при идеальном автопилоте, неизменном векторе скорости (что допустимо для высокоскоростных ЛА при высоких требованиях к быстродействию системы управления) и постоянном нулевом угле крена имеет следующий вид:

где  ,
,  ,
,  - приведенные к моменту инерции ЛА относительно поперечной оси Z производные аэродинамических моментов вокруг этой оси.
- приведенные к моменту инерции ЛА относительно поперечной оси Z производные аэродинамических моментов вокруг этой оси.
Для сравнения, управляющий сигнал, представленный в прототипе, выглядит следующим образом:

Передаточная функция в этом случае имеет следующий вид:

Передаточная функция (4) имеет форсирующее звено, что приводит к большому перерегулированию в переходных процессах при отработке заданной команды угла тангажа.
По результатам моделирования получены переходные процессы при отработке заданного значения угла тангажа ϑ и изменение скорости руля высоты  (см. фиг.2), для системы управления прототипа (кривые ϑ 14,
(см. фиг.2), для системы управления прототипа (кривые ϑ 14,  15) и для заявляемой системы управления (кривые ϑ 16, 17) с одинаковыми значениями Кϑ, Кω и К∫.
15) и для заявляемой системы управления (кривые ϑ 16, 17) с одинаковыми значениями Кϑ, Кω и К∫.
Таким образом, после сравнения переходных процессов видно, что предложенная в заявленном изобретении система управления углом тангажа ЛА позволяет уменьшить перерегулирование в переходных процессах при отработке заданной команды угла тангажа и уменьшить потребную мощность привода органа управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2290346C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ НА ЭТАПЕ СТАБИЛИЗАЦИИ ВЫСОТЫ КРУГА | 2018 |
|
RU2703378C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335009C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
Изобретение относится к бортовым системам автоматического управления летательными аппаратами (ЛА). Система управления углом тангажа ЛА содержит датчик угловой скорости, задатчик сигнала тангажа, датчик углового положения, блок сравнения, интегратор, блоки усилителей Kϑ, Kω и K∫, сумматор, усилитель рулевой мащины, рулевую машину с обратной связью и руль высоты. Первый вход блока сравнения соединен с выходом датчика углового положения, второй вход блока сравнения соединен с выходом задатчика сигнала тангажа. Выход датчика углового положения через блок усилителя Kϑ соединен с первым входом сумматора. Второй вход сумматора через блок усилителя Kω, соединен с выходом датчика угловой скорости. Третий вход сумматора, подключен через блок усилителя K∫ и интегратор к выходу блока сравнения. Выход сумматора через усилитель рулевой машины соединен с входом рулевой машины, выход рулевой машины соединен с входом руля высоты и через обратную связь подключен к четвертому входу сумматора. Достигается уменьшение перерегулирования в переходных процессах при отработке заданной команды угла тангажа и связанное с этим уменьшение потребной мощности привода органа управления. 2 ил.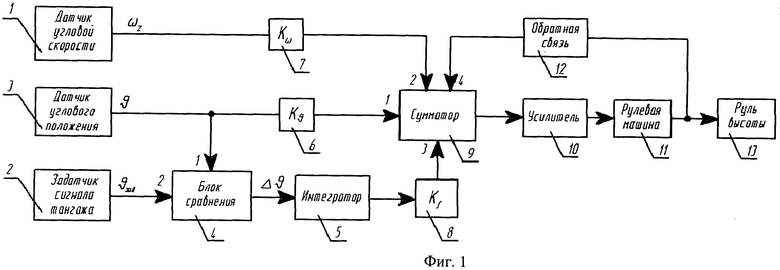
Система управления углом тангажа летательного аппарата, содержащая датчик угловой скорости, задатчик сигнала тангажа, датчик углового положения, блок сравнения, интегратор, три блока усилителей, сумматор, усилитель рулевой машины, рулевую машину с обратной связью, руль высоты, при этом первый вход блока сравнения соединен с выходом датчика углового положения, второй вход блока сравнения соединен с выходом задатчика сигнала тангажа, второй вход сумматора через блок усилителя Kω соединен с выходом датчика угловой скорости, третий вход сумматора подключен через блок усилителя K∫ и интегратор к выходу блока сравнения, выход сумматора через усилитель рулевой машины соединен с входом рулевой машины, выход рулевой машины соединен с входом руля высоты и через обратную связь подключен к четвертому входу сумматора, отличающаяся тем, что выход датчика углового положения через блок усилителя Kϑ соединен с первым входом сумматора.
| Михалев И.А., Окоемов Б.Н., Чикулаев М.С | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174 | |||
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2290346C1 |
| US 5979835 A, 09.11.1999. | |||

