Изобретение относится к функциональным устройствам для бортовых систем автоматического управления и стабилизации аэродинамических летательных аппаратов (ЛА).
Известны системы управления угловым положением ЛА, содержащие датчик угла, датчик угловой скорости, последовательно соединенные задатчик сигнала управления, блок сравнения, второй вход которого соединен с выходом датчика угла, и суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости [1].
Недостатком известного устройства является ограниченность функциональных возможностей управления и невысокая точность при больших значениях углов атаки, поскольку значительная часть сигнала управления расходуется на переходные процессы с учетом балансировочного значения угла атаки.
Наиболее близким к предлагаемому изобретению является устройство формирования сигнала управления, которое содержит измеритель углового положения, измеритель угловой скорости, последовательно соединенные задатчик сигнала управления, блок сравнения, второй вход которого соединен с выходом измерителя углового положения, и первый суммирующий усилитель, второй вход которого соединен с выходом измерителя угловой скорости, последовательно соединенные интегрирующий усилитель, вход которого соединен с выходом блока сравнения, и первый ограничитель сигнала, и второй суммирующий усилитель [2].
Недостатками известного устройства, принятого за прототип, являются повышенная динамичность канала балансировки летательного аппарата, обусловливающая дополнительное движение относительно осредненных параметров балансировки балансировочного канала, что в условиях нестационарности летательного аппарата, например, по скорости и высоте, ограничивает функциональные возможности устройства в целом.
Указанные недостатки особенно заметно проявляются в реальных условиях при управлении летательным аппаратом, рулевые поверхности которого задействуются во всех каналах управления (по тангажу, крену).
Решаемой в предлагаемом устройстве технической задачей является расширение функциональных возможностей устройства и повышение точности управления.
Указанный результат достигается тем, что в известное устройство, содержащее измеритель углового положения, измеритель угловой скорости, последовательно соединенные задатчик сигнала управления, блок сравнения, второй вход которого соединен с выходом измерителя углового положения, и первый суммирующий усилитель, второй вход которого соединен с выходом измерителя угловой скорости, последовательно соединенные интегрирующий усилитель, вход которого соединен с выходом блока сравнения, и первый ограничитель сигнала, и второй суммирующий усилитель, дополнительно введены последовательно соединенные измеритель скоростного напора и апериодический фильтр, второй вход которого соединен с выходом первого ограничителя сигнала, а выход - со входом второго суммирующего усилителя, и второй ограничитель сигнала, вход которого соединен с выходом второго суммирующего усилителя, а выход является выходом устройства, при этом выход измерителя скоростного напора соединен со вторыми входами интегрирующего усилителя и первого ограничителя сигнала, а выход первого суммирующего усилителя соединен с вторым входом второго суммирующего усилителя, при этом величина постоянной времени апериодического фильтра Тф составляет Тф=(0,2÷0,5) Тϑ, где Тϑ - постоянная времени канала тангажа летательного аппарата.
Введенный в канал балансировки апериодический фильтр определяет необходимое замедление процесса в этом канале по сравнению с более динамичным процессом в основном канале управления. По предложенному решению корректно распределены функции ограничения выходных сигналов в каналах управления по физическому смыслу, исходя из ограничения ресурса рулевых органов и расчетного значения балансировки для балансировочного канала. Таким образом, отработка сигналов управления по основному каналу производится функционально - без предварительного избыточного ограничения. Введены средства адаптации - перестройка требуемых параметров балансировочного канала: коэффициента усиления интегрирующего усилителя, ограничения и постоянной времени апериодического фильтра - в функции скоростного напора как наиболее характерной функции условий полета ЛА: скорости V и высоты H.
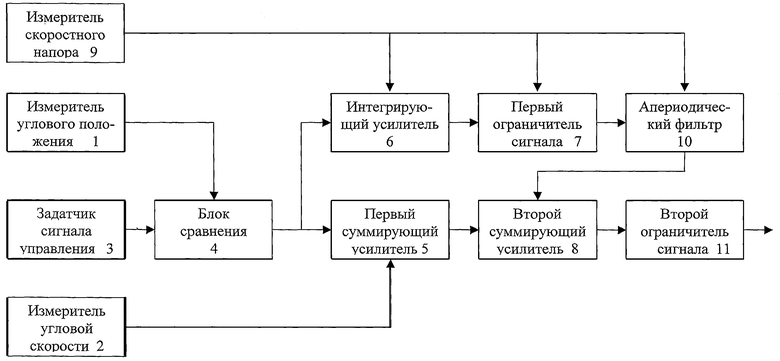
На чертеже представлена структурная схема адаптивного устройства формирования сигнала управления продольно-балансировочным движением летательного аппарата.
Адаптивное устройство формирования сигнала управления продольно-балансировочным движением летательного аппарата содержит измеритель углового положения 1, измеритель угловой скорости 2, последовательно соединенные задатчик сигнала управления 3, блок сравнения 4, второй вход которого соединен с выходом измерителя углового положения 1, и первый суммирующий усилитель 5, второй вход которого соединен с выходом измерителя угловой скорости 2, последовательно соединенные интегрирующий усилитель 6, вход которого соединен с выходом блока сравнения 4, и первый ограничитель сигнала 7, и второй суммирующий усилитель 8, последовательно соединенные измеритель скоростного напора 9 и апериодический фильтр 10, второй вход которого соединен с выходом первого ограничителя сигнала 7, а выход - с первым входом второго суммирующего усилителя 8, и второй ограничитель сигнала 11, вход которого соединен с выходом второго суммирующего усилителя 8, а выход является выходом устройства, при этом выход измерителя скоростного напора 9 соединен со вторыми входами интегрирующего усилителя 6 и первого ограничителя сигнала 7, а выход первого суммирующего усилителя 5 соединен с вторым входом второго суммирующего усилителя 8.
Устройство сформировано для канала тангажа и работает следующим образом.
Задатчиком сигнала управления 3 формируется сигнал управления ϑзад.(t), составными компонентами которого являются:
- балансировочная, медленная компонента ϑзад.м(t), соответствующая изменениям балансировочных углов атаки αбал. и отклонениям рулей δбал.
- текущая, быстрая компонента ϑзад.б(t), соответствующая управляемым разворотам ЛА.
Таким образом,

Закон регулирования формируется по сигналам управления ϑзад.(t) углового положения ЛА ϑ(t) и угловой скорости ЛА ωz(t). Основная, базовая компонента сигнала управления σб(x) формируется в первом суммирующем усилителе 5 в виде:

где Δϑ(t) - сигнал рассогласования,

формируемый блоком сравнения 4 по сигналам ϑзад.(t) от задатчика сигнала управления 3 и ϑ(t) от измерителя углового положения 1;
Kϑ, Кωz - передаточные числа по рассогласованию и угловой скорости, соответственно;
ωz(t) - сигнал угловой скорости ЛА, поступающий от измерителя угловой скорости 2, ωz(t)= (t).
(t).
Сигнал σб(t) поступает на второй суммирующий усилитель 8. Сигнал σб(t), сформированный в соответствии с базовым законом управления (2), дополняется сигналом интегральной компоненты σu(t), который формируется интегрирующим усилителем 6 по сигналу рассогласования (3):

где Ки - масштабный передаточный коэффициент интегрирующего усилителя 6.
Сигнал σи(t) ограничивается первым ограничителем сигнала 7, уровень ограничения σогр и(t) которого соответствует рассчитанному значению балансировочного отклонения рулей δбал. Сигнал σогр и(t) с первого ограничителя 7 поступает через апериодический фильтр 10 в виде сигнала σф(t) на второй суммирующий усилитель 8, сигнал на выходе которого равен:

Далее сигнал σвых(t) ограничивается по уровню вторым ограничителем сигнала 11, полученный ограниченный сигнал  (t) и является выходным сигналом устройства. Уровень ограничения, установленный на втором ограничителе сигнала 11, определяет величину сигналов рассматриваемого канала управления по тангажу, необходимую для отработки их соответствующими рулевыми поверхностями, с учетом бездефицитности отработки этими же рулями сигналов смежных каналов (курса и крена, здесь не рассматриваемых). При этом величина постоянной времени апериодического фильтра 10 Тф, с точки зрения компромисса по эффективности интегральной компоненты и обеспечения устойчивости контура управления, определяется в пределах Тф=(0,2÷0,5Тϑ, где Tϑ - постоянная времени канала тангажа ЛА.
(t) и является выходным сигналом устройства. Уровень ограничения, установленный на втором ограничителе сигнала 11, определяет величину сигналов рассматриваемого канала управления по тангажу, необходимую для отработки их соответствующими рулевыми поверхностями, с учетом бездефицитности отработки этими же рулями сигналов смежных каналов (курса и крена, здесь не рассматриваемых). При этом величина постоянной времени апериодического фильтра 10 Тф, с точки зрения компромисса по эффективности интегральной компоненты и обеспечения устойчивости контура управления, определяется в пределах Тф=(0,2÷0,5Тϑ, где Tϑ - постоянная времени канала тангажа ЛА.
Введение интегральной компоненты в балансировочный канал - блоки 6, 7, 10, 8 - обеспечивает отработку балансировочной, медленной компоненты сигнала управления ϑзад.м(t). Действительно, пусть ϑзад.б=0, ϑзад.м≠0. Тогда в силу того, что закон формирования выходного сигнала представленного устройства является астатическим законом нулевого порядка, установившееся значение сигнала рассогласования для такого режима

Тогда, в соответствии с (3) установившееся значение ϑуст:

Очевидно также, что для этого режима  Следовательно, и установившееся значение интегральной компоненты σи уст соответствует балансировочному значению угла отклонения рулевых поверхностей ЛА:
Следовательно, и установившееся значение интегральной компоненты σи уст соответствует балансировочному значению угла отклонения рулевых поверхностей ЛА:
Поскольку для рассматриваемого режима Δϑуст=0, ωzуст=0, то и σб уст=0 и  .
.
При поступлении на вход основного канала (блоки 4, 5, 8, 11) быстрой компоненты сигнала управления ϑзад.б(t), например, для управления маневром ЛА, отработка его будет осуществляться относительно балансировочного движения ЛА и будет симметричным для сигналов ϑзад.б(t) разных знаков, т.е. будет производиться относительно нуля характеристики второго ограничителя 11 (ограничителя прямой цепи формирования управляющего сигнала σвых(t)), что повышает точность отработки управляющих воздействий на ЛА в целом.
Введение ограничения сигнала интегральной компоненты и последующей фильтрации позволяет уменьшить колебательность в замкнутом контуре регулирования и значительные выбросы в переходных процессах.
Таким образом, предложенное адаптивное устройство формирования сигнала управления продольно-балансировочным движением летательного аппарата позволяет расширить функциональные возможности управления летательным аппаратом в целом и повысить точность.
Положительный эффект подтвержден результатами анализа и математического моделирования.
Все составные звенья и блоки устройства управления могут быть выполнены на современных элементах автоматики и вычислительной техники, а также и программно-алгоритмически в бортовых вычислительных машинах ЛА.
Источники информации
1. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998, с.411.
2. Полезная модель РФ №56663, кл. G05D 1/08, 25.05.2006 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459744C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления | 2016 |
|
RU2631718C1 |
Изобретение относится к области авиакосмического приборостроения и может найти применение при проектировании бортовых систем автоматического управления летательными аппаратами. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит измеритель углового положения, измеритель угловой скорости, задатчик сигнала управления, блок сравнения, первый и второй суммирующие усилители, интегрирующий усилитель, первый и второй блоки ограничения сигнала, измеритель скоростного напора и апериодический фильтр. При этом величина постоянной времени апериодического фильтра Тф составляет Тф=(0,2÷0,5)Тϑ, где Тϑ - постоянная времени канала тангажа летательного аппарата. 1 ил.
Адаптивное устройство формирования сигнала управления продольно-балансировочным движением летательного аппарата, содержащее измеритель углового положения, измеритель угловой скорости, последовательно соединенные задатчик сигнала управления, блок сравнения, второй вход которого соединен с выходом измерителя углового положения, и первый суммирующий усилитель, второй вход которого соединен с выходом измерителя угловой скорости, последовательно соединенные интегрирующий усилитель, вход которого соединен с выходом блока сравнения, и первый ограничитель сигнала, и второй суммирующий усилитель, отличающееся тем, что оно содержит последовательно соединенные измеритель скоростного напора и апериодический фильтр, второй вход которого соединен с выходом первого ограничителя сигнала, а выход - со входом второго суммирующего усилителя, и второй ограничитель сигнала, вход которого соединен с выходом второго суммирующего усилителя, а выход является выходом устройства, при этом выход измерителя скоростного напора соединен со вторыми входами интегрирующего усилителя и первого ограничителя сигнала, а выход первого суммирующего усилителя соединен с вторым входом второго суммирующего усилителя, при этом величина постоянной времени апериодического фильтра Тф составляет Тф=(0,2÷0,5)Тϑ, где Тϑ - постоянная времени канала тангажа летательного аппарата.
| Интегратор | 1938 |
|
SU56663A2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |

