Изобретение относится к авиации и ракетной технике, к системам управления, действующим автоматически, с автопилотом.
В качестве прототипа принята система стабилизации высоты полета летательного аппарата (ЛА) (Боднер В.А., Козлов М.С. "Стабилизация летательных аппаратов и автопилоты" Оборонгиз, М., 1961, стр.92), обеспечивающая автоматическое управление высотой полета ЛА и содержащая сумматор, имеющий четыре входа, усилитель, рулевую машину, руль высоты, обратную связь, гировертикаль (свободный гироскоп тангажа), скоростной гироскоп (датчик угловой скорости) и высотомер, причем выходы свободного гироскопа тангажа, датчика угловой скорости и высотомера соединены с входами сумматора, выход сумматора соединен с входом усилителя, выход которого подключен к входу рулевой машины, а выход рулевой машины соединен с рулем высоты и через обратную связь подключен к входу сумматора.
Все данные существенные признаки присутствуют в предлагаемом техническом решении за исключением подключения выхода высотомера непосредственно к входу сумматора.
Принятая в качестве прототипа система управления обеспечивает стабилизацию высоты полета ЛА, однако при необходимости быстрого изменения высоты полета ЛА, например с высоты полета самолета-носителя в момент пуска, которая может составлять 10000 м и более, до высоты маршевого полета 10...20 м, использование этой системы управления не обеспечивает стабилизации полета на маршевой высоте без перерегулирования, которое в рассматриваемом случае приводит к столкновению с подстилающей поверхностью.
Предлагаемым решением решается техническая задача обеспечения стабилизации высоты полета ЛА без перерегулирования после быстрого изменения высоты полета.
Для решения этой задачи в систему автоматического управления высотой полета беспилотного летательного аппарата, содержащую сумматор, усилитель, рулевую машину, руль высоты, обратную связь, свободный гироскоп тангажа, датчик угловой скорости и высотомер с выходами по значениям высоты и скорости ее изменения, причем выходы свободного гироскопа тангажа и датчика угловой скорости соединены с входами сумматора, выход сумматора соединен с входом усилителя, выход которого подключен к входу рулевой машины, а выход рулевой машины соединен с рулем высоты и через обратную связь подключен к входу сумматора; дополнительно включены два блока формирования сигналов рассогласования между истинной высотой полета и заданной, коммутатор и интегратор, коммутатор имеет два входа, первый из которых соединен с выходом высотомера по значению высоты, второй вход подключен к выходу высотомера по значению скорости изменения высоты, и два выхода, причем выход коммутатора по значению высоты полета соединен с входами первого и второго блоков формирования сигналов рассогласования, а выход по значению скорости изменения высоты полета с входом сумматора, вход интегратора подключен к выходу второго блока формирования сигнала рассогласования, а выходы интегратора и первого блока формирования сигнала рассогласования подключены к входам сумматора.
Основой технического решения предлагаемого изобретения является наличие в сигнале управления высотой полета двух составляющих, формируемых соответственно первым и вторым блоками формирования сигналов рассогласования
ΔHc=Н-Нс;
ΔНм=Н-Нм,
где Н - текущая высота полета,
Hc - высота полета начала стабилизации,
Нм - маршевая высота полета.
Вторая составляющая (ΔНм) формирует ту составляющую сигнала управления, которая стимулирует выход на высоту маршевого полета, в то время как первая составляющая оказывает демпфирующее воздействие, не допуская перерегулирования при выходе на маршевую высоту полета. Высота начала стабилизации превышает маршевую высоту полета на несколько десятков метров, причем конкретное значение этого превышения (Нc-Нм) выбирается заранее путем математического моделирования.
Предлагаемое техническое решение имеет следующие отличительные признаки: система автоматического управления высотой полета ЛА содержит два блока формирования сигналов рассогласования между истинной высотой полета и заданной, коммутатор и интегратор, коммутатор имеет два входа, первый из которых соединен с выходом высотомера по значению высоты, второй вход подключен к выходу высотомера по значению скорости изменения высоты, и два выхода, причем выход коммутатора по значению высоты полета соединен с входами первого и второго блоков формирования сигналов рассогласования, а выход по значению скорости изменения высоты полета с входом сумматора, вход интегратора подключен к выходу второго блока формирования сигнала рассогласования, а выходы интегратора и первого блока формирования сигнала рассогласования подключены к входам сумматора.
Благодаря наличию указанных отличительных признаков в совокупности с известными (указанными в ограничительной части формулы) достигается следующий технический результат - выход на маршевую высоту полета происходит без перерегулирования.
В результате поиска по источникам патентной и научно-технической информации совокупность признаков, характеризующая предлагаемую конструкцию устройства стабилизации высоты полета ЛА, не была обнаружена. Таким образом, предлагаемое изобретение соответствует критерию охраноспособности "новое".
Предложенное техническое решение может найти применение в системах управления беспилотными летательными аппаратами, а следовательно, отвечает требованию "промышленно применимо".
Предлагаемое техническое решение иллюстрируется фиг.1 и 2.
На фиг.1 представлена блок-схема предлагаемой системы управления.
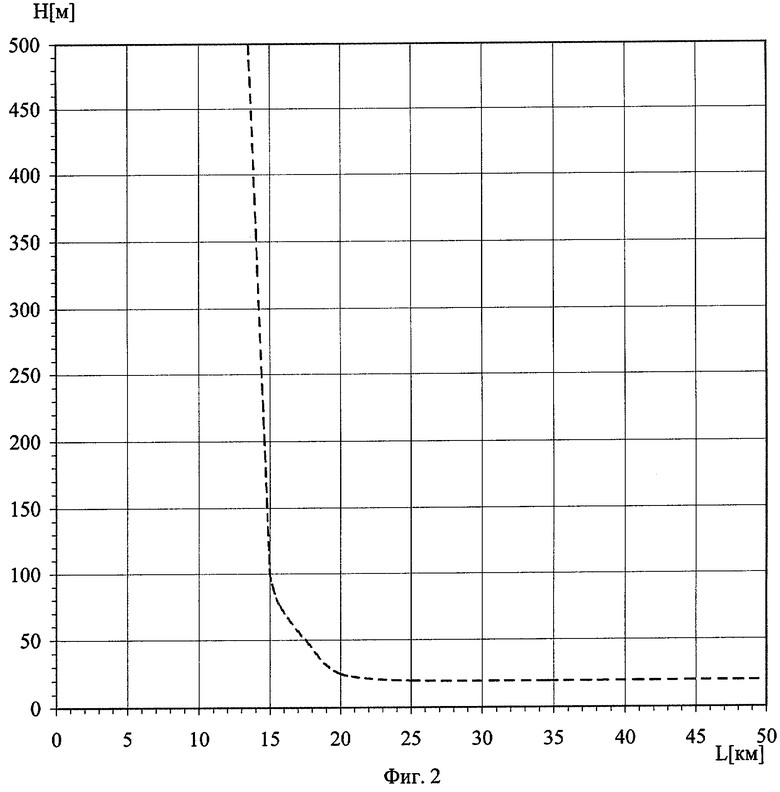
На фиг.2 показан конечный участок траектории перехода ЛА с высоты пуска на маршевую высоту.
Представленная на фиг.1 блок-схема системы автоматического управления высотой полета беспилотного ЛА содержит сумматор 1, усилитель 2, рулевую машину 3, обратную связь 4, руль высоты 5, свободный гироскоп тангажа 6, датчик угловой скорости 7, высотомер 8 с выходами по значениям высоты и скорости ее изменения, коммутатор 9, первый блок формирования сигнала рассогласования 10, второй блок формирования сигнала рассогласования 11 и интегратор 12.
При этом выход сумматора 1 соединен с входом усилителя 2, выход которого подключен к входу рулевой машины 3, выход рулевой машины 3 соединен с рулем высоты 5 и через обратную связь 4 подключен к входу сумматора 1, выходы свободного гироскопа тангажа 6, датчика угловой скорости 7, интегратора 12, первого блока формирования сигнала рассогласования 10 подключены к входам сумматора 1, выходы высотомера 8 по значениям высоты полета и скорости ее изменения соединены с входами коммутатора 9, выход коммутатора 9 по значению высоты полета подключен к входам первого блока формирования сигнала рассогласования 10 и второго блока формирования сигнала рассогласования 11, выход последнего соединен с входом интегратора 12, выход коммутатора 9 по значению скорости изменения высоты полета подключен к сумматору 1.
Вновь введенные устройства - первый и второй блоки формирования сигналов рассогласования (10, 11), коммутатор 9 и интегратор 12 - представляют собой электронные блоки, построенные на базе одного или нескольких усилителей, коммутатор 9 содержит в своем составе реле.
Выполняемые этими блоками задачи могут быть решены и на базе цифровой техники, в частности, с использованием микропроцессоров.
Сумматор представляет устройство, позволяющее суммировать несколько напряжений, каждое из которых пропорционально соответствующему сигналу (Ю.П.Добровенский, В.И.Иванова, Г.С.Поспелов. Автоматика управляемых снарядов. Оборонгиз, М., 1963, стр.218).
В предлагаемом техническом решении в отличие от прототипа выход высотомера 8 по значению высоты полета подается в сумматор 1 через коммутатор 9 и первый блок рассогласования 10. Кроме того, сумматор 1 имеет по сравнению с прототипом два дополнительных входа, на которые подаются напряжения, пропорциональные скорости изменения высоты полета (с выхода коммутатора 9) и  (с интегратора 12).
(с интегратора 12).
Предложенная система автоматического управления высотой полета беспилотного ЛА работает следующим образом.
При достижении в процессе снижения высоты полета Н≤Нc коммутатор 9 включает в работу первый и второй блоки формирования сигналов рассогласования 10, 11, запускает интегратор 12 и подключает свой выход по значению скорости изменения высоты полета к входу сумматора 1; система управления переходит в режим стабилизации высоты полета.
Угол тангажа ( ) и угловая скорость (
) и угловая скорость ( ), измеренные соответственно свободным гироскопом тангажа 6 и датчиком угловой скорости 7, поступают непосредственно на входы сумматора 1.
), измеренные соответственно свободным гироскопом тангажа 6 и датчиком угловой скорости 7, поступают непосредственно на входы сумматора 1.
Скорость изменения высоты полета, измеренная высотомером 8, поступает на вход сумматора 1 через коммутатор 9.
Текущая высота полета, измеренная высотомером 8, через коммутатор 9 поступает в первый и второй блоки формирования сигналов рассогласования 10, 11, на выходе которых соответственно формируются сигналы рассогласования
ΔHc=Н-Нс;
ΔНм=Н-Нм,
причем последний проходит через интегратор 12, на выходе которого формируется сигнал  где tc - время начала режима стабилизации.
где tc - время начала режима стабилизации.
Сигналы  и ΔHc поступают на входы сумматора 1, на выходе которого формируется управляющий сигнал
и ΔHc поступают на входы сумматора 1, на выходе которого формируется управляющий сигнал

Здесь iв, ρв, kн,  kiH - передаточные числа.
kiH - передаточные числа.
В сумматоре 1 формируется сигнал рассогласования между управляющим сигналом и выходом обратной связи 4, который через усилитель 2 поступает на вход рулевой машины 3. Рулевая машина отклоняет руль высоты 5, в результате чего происходит изменение углового положения летательного аппарата и, как следствие, высоты его полета.
В результате система автоматического управления высотой полета обеспечивает не только полет ЛА на высоте, близкой к маршевой, но и реализует безопасный для ЛА выход на маршевую высоту полета независимо от перепада между высотой пуска и высотой маршевого полета.
Положительный эффект предложенного технического решения иллюстрируется на фиг.2, где показан конечный участок траектории перехода ЛА с высоты 11000 м на маршевую высоту Нм=15 м при высоте начала стабилизации Нc=100 м. Предлагаемая система автоматического управления обеспечивает стабилизацию высоты полета ЛА без перерегулирования после быстрого изменения высоты полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, и устройство для его осуществления | 2021 |
|
RU2764322C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ НАБОРЕ И СТАБИЛИЗАЦИИ ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА | 2016 |
|
RU2619793C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2461041C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
Изобретение относится к авиации и ракетной технике, к системам управления, действующим автоматически, с автопилотом. Система автоматического управления высотой полета беспилотного летательного аппарата включает в себя сумматор, усилитель, рулевую машину, руль высоты, обратную связь, свободный гироскоп тангажа, датчик угловой скорости и высотомер с выходами по значениям высоты и скорости ее изменения. Причем выходы свободного гироскопа тангажа и датчика угловой скорости соединены с входами сумматора, а выход сумматора соединен с входом усилителя, выход которого подключен к входу рулевой машины. Выход рулевой машины соединен с рулем высоты и через обратную связь подключен к входу сумматора. Кроме этого, система содержит дополнительно два блока формирования сигналов рассогласования между истинной высотой полета и заданной, коммутатор и интегратор. Коммутатор имеет два входа, первый из которых соединен с выходом высотомера по значению высоты, второй вход подключен к выходу высотомера по значению скорости изменения высоты, и два выхода, причем выход коммутатора по значению высоты полета соединен с входами первого и второго блоков формирования сигналов рассогласования, а выход по значению скорости изменения высоты полета - с входом сумматора, вход интегратора подключен к выходу второго блока формирования сигнала рассогласования, а выходы интегратора и первого блока формирования сигнала рассогласования подключены к входам сумматора. Техническим результатом является обеспечение стабилизации высоты полета ЛА без перерегулирования после быстрого изменения высоты полета. 2 ил.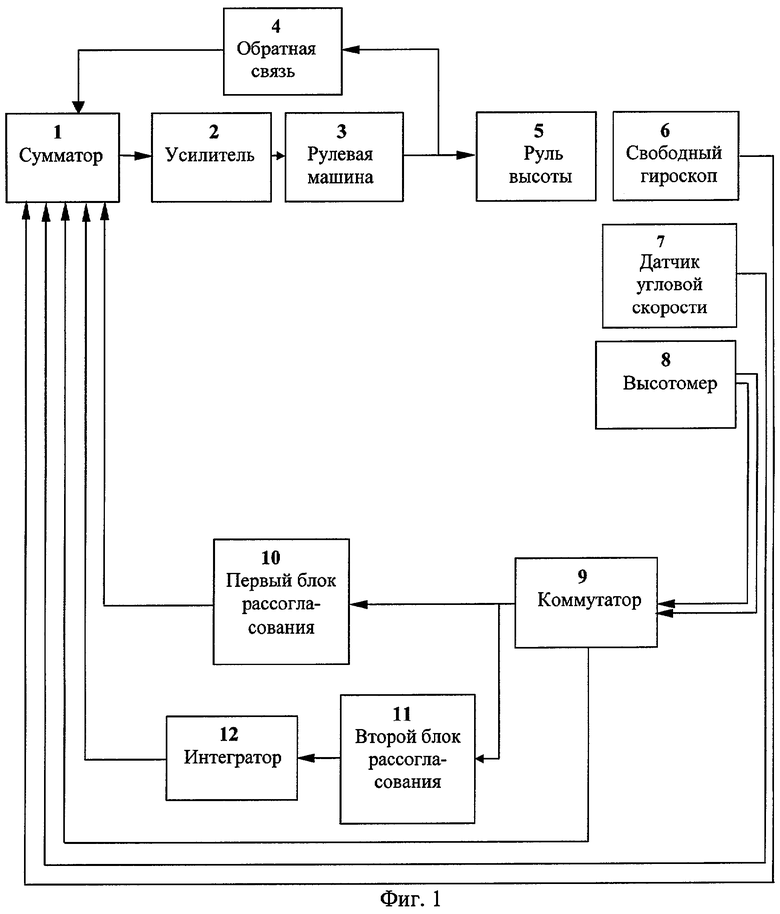
Система автоматического управления высотой полета беспилотного летательного аппарата, содержащая сумматор, усилитель, рулевую машину, руль высоты, обратную связь, свободный гироскоп тангажа, датчик угловой скорости и высотомер с выходами по значениям высоты и скорости ее изменения, причем выходы свободного гироскопа тангажа и датчика угловой скорости соединены с входами сумматора, выход сумматора соединен с входом усилителя, выход которого подключен к входу рулевой машины, а выход рулевой машины соединен с рулем высоты и через обратную связь подключен к входу сумматора, отличающаяся тем, что система содержит два блока формирования сигналов рассогласования между истинной высотой полета и заданной, коммутатор и интегратор, коммутатор имеет два входа, первый из которых соединен с выходом высотомера по значению высоты, второй вход подключен к выходу высотомера по значению скорости изменения высоты, и два выхода, причем выход коммутатора по значению высоты полета соединен с входами первого и второго блоков формирования сигналов рассогласования, а выход по значению скорости изменения высоты полета - с входом сумматора, вход интегратора подключен к выходу второго блока формирования сигнала рассогласования, а выходы интегратора и первого блока формирования сигнала рассогласования подключены к входам сумматора.
| В.А.Боднер, М.С.Козлов, "Стабилизация летательных аппаратаов и автопилоты", Оборонгиз, М.: 1961, стр.92-97 | |||
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| US 2003212478 A1, 13.11.2003. | |||

