Изобретение относится к устройствам бортовых систем автоматического управления летательными аппаратами (ЛА).
Известны способы и системы управления и стабилизации углового положения ЛА. Наиболее близким к предлагаемому изобретению являются способ и система управления каналом тангажа летательного аппарата, входящие в "Систему управления угловым движением беспилотного летательного аппарата" (патент РФ №2234117, кл. G05D 1/08, 2004 г.).
Этот способ управления состоит в том, что задают сигнал управления, измеряют сигнал углового положения ЛА, измеряют сигнал угловой скорости ЛА, формируют сигнал рассогласования между заданным сигналом управления и измеренным сигналом углового положения ЛА, усиливают сигнал рассогласования, усиливают сигнал угловой скорости, формируют управляющий сигнал как сумму усиленных сигналов рассогласования и угловой скорости и ограничивают сигнал суммы.
Устройство для формирования сигнала управления по этому способу содержит измеритель углового положения ЛА, измеритель угловой скорости, последовательно соединенные задатчик сигнала управления, блок сравнения, второй вход которого соединен с выходом измерителя углового положения, суммирующий усилитель, второй вход которого соединен с выходом измерителя угловой скорости, управляемый переключатель, первый и второй ограничители сигнала, сумматор, первый вход которого соединен с выходом первого ограничителя сигнала, а второй вход подключен к выходу второго ограничителя сигнала, и исполнительное устройство объекта управления.
Существенными признаками прототипа-способа, совпадающими с существенными признаками предлагаемого технического решения, являются следующие признаки: способ формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата, включающий задание сигнала управления, измерение сигнала углового положения летательного аппарата, измерение сигнала угловой скорости летательного аппарата, формирование сигнала рассогласования между заданным сигналом управления и измеренным сигналом углового положения, усиление сигнала рассогласования, усиление сигнала угловой скорости, формирование сигнала суммы усиленных сигналов рассогласования и угловой скорости и ограничение сигнала суммы.
Существенными признаками прототипа-устройства, совпадающими с существенными признаками предлагаемого технического решения, являются следующие признаки: устройство формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата, содержащее измеритель углового положения, измеритель угловой скорости, последовательно соединенные задатчик сигнала управления, блок сравнения, второй вход которого соединен с выходом измерителя углового положения, первый суммирующий усилитель, второй вход которого соединен с выходом измерителя угловой скорости, и первый ограничитель сигнала.
Недостатками способа и устройства, принятого за прототип, являются ограниченность функциональных возможностей управления и невысокая точность при больших углах атаки, поскольку на поддержание балансировочного угла атаки ЛА расходуется основная часть сигнала управления, а для реализации эволюций при разворотах ЛА остается незначительная часть ограниченного сигнала управления.
Указанный недостаток особенно заметно проявляется в реальных условиях при управлении летательным аппаратом, рулевые поверхности которого задействуются во всех трех каналах управления (т.е. не только по тангажу, но и по курсу и крену).
Решаемой в предлагаемых способе и устройстве технической задачей является расширение функциональных возможностей устройства и повышение точности управления.
Для решения названной технической задачи в способе формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата, включающем задание сигнала управления, измерение сигнала углового положения летательного аппарата, измерение сигнала угловой скорости летательного аппарата, формирование сигнала рассогласования между заданным сигналом управления и измеренным сигналом углового положения, усиление сигнала рассогласования, усиление сигнала угловой скорости, формирование сигнала суммы усиленных сигналов рассогласования и угловой скорости и ограничение сигнала суммы, дополнительно масштабируют сигнал рассогласования, интегрируют масштабированный сигнал рассогласования, ограничивают интегральный сигнал и суммируют ограниченный интегральный сигнал с ограниченным сигналом суммы усиленных сигналов рассогласования и угловой скорости.
Для решения названной технической задачи устройство формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата, содержащее измеритель углового положения, измеритель угловой скорости, последовательно соединенные задатчик сигнала управления, блок сравнения, второй вход которого соединен с выходом измерителя углового положения, первый суммирующий усилитель, второй вход которого соединен с выходом измерителя угловой скорости, и первый ограничитель сигнала, дополнительно содержит последовательно соединенные интегрирующий усилитель, вход которого соединен с выходом блока сравнения, второй ограничитель сигнала и второй суммирующий усилитель, второй вход которого соединен с выходом первого ограничителя сигнала, а выход является выходом устройства.
Отличительными признаками предлагаемого технического решения - способа формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата - является то, что масштабируют сигнал рассогласования между заданным сигналом управления и измеренным сигналом углового положения летательного аппарата, интегрируют масштабированный сигнал рассогласования, ограничивают интегральный сигнал и суммируют ограниченный интегральный сигнал с ограниченным сигналом суммы усиленных сигналов рассогласования и угловой скорости.
Отличительными признаками предлагаемого технического решения - устройства формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата является то, что в него введены последовательно соединенные интегрирующий усилитель, вход которого соединен с выходом блока сравнения, второй ограничитель сигнала и второй суммирующий усилитель, второй вход которого соединен с выходом первого ограничителя сигнала, а выход является выходом устройства.
Предложенные способ формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата и устройство для его осуществления, как показывает проведенное математическое моделирование, позволяют расширить функциональные возможности управления летательным аппаратом (т.е. дают возможность отрабатывать интенсивные медленно меняющиеся "опорные" сигналы управления и быстро меняющиеся стабилизационные сигналы) и повысить при этом точность управления. По существу, сформированы два взаимосвязанных канала, сочетающие в целом управление медленным балансировочным и быстрым маневренным движением ЛА.
Способ формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата и устройство для его осуществления могут найти применение в системах управления маневренными летательными аппаратами, к которым предъявляются достаточно высокие требования по точности управления при ограниченных энергетических или динамических ресурсах исполнительных органов систем управления.
Предлагаемые технические решения поясняются блок-схемой, на которой представлена структурная схема устройства формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата.
Устройство формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата содержит измеритель углового положения ЛА 1, измеритель угловой скорости 2, последовательно соединенные задатчик сигнала управления 3, блок сравнения 4, второй вход которого подключен к выходу измерителя углового положения 1, первый суммирующий усилитель 5, второй вход которого соединен с выходом измерителя угловой скорости 2, первый ограничитель сигнала 6, последовательно соединенные интегрирующий усилитель 7, вход которого подключен к выходу блока сравнения 4, второй ограничитель сигнала 8 и второй суммирующий усилитель 9, второй вход которого соединен с выходом первого ограничителя сигнала 6, а выход является выходом устройства.
Устройство с реализацией способа работает следующим образом.
Задатчиком сигнала управления 3 формируется (задается) сигнал управления ϑзад.(t), основными составными компонентами которого являются:
- медленная компонента ϑзад.м(t), соответствующая медленным разворотам ЛА с балансировочными углами атаки αбал и балансировочными углами отклонения рулей δбал;
- быстрая компонента ϑзад.б(t), соответствующая маневренным разворотам ЛА.
Таким образом,

Закон регулирования (управления и стабилизации) формируется по сигналу управления ϑзад(t), сигналу углового положения ЛА, ϑ(t) и угловой скорости ЛА ωz(t). Основная, базовая компонента сигнала управления σб(t) формируется в суммирующем усилителе 5 в виде:

где Δϑ(t) - сигнал рассогласования,

формируемый блоком сравнения 4 по сигналам ϑзад(t) от задатчика 3 и ϑ(t) от измерителя углового положения 1;
Kϑ, Кωz - передаточные числа;
ωz(t) - сигнал угловой скорости ЛА, поступающий от измерителя угловой скорости 2, 
Сигнал σб(t) ограничивается по уровню первым ограничителем сигнала 6, и ограниченный сигнал  поступает на второй суммирующий усилитель 9. Уровень ограничения, установленный на первом ограничителе 6, определяет величину сигналов рассматриваемого канала управления, необходимую для отработки их соответствующими рулевыми поверхностями, с учетом бездефицитности отработки этими же рулями сигналов смежных каналов (курса и крена, здесь не рассматриваемых).
поступает на второй суммирующий усилитель 9. Уровень ограничения, установленный на первом ограничителе 6, определяет величину сигналов рассматриваемого канала управления, необходимую для отработки их соответствующими рулевыми поверхностями, с учетом бездефицитности отработки этими же рулями сигналов смежных каналов (курса и крена, здесь не рассматриваемых).
Сигнал, сформированный в соответствии с базовым законом управления (2), дополняется сигналом интегральной компоненты σи(t), который формируется интегрирующим усилителем 7 по сигналу рассогласования (3)

где Ки - масштабный передаточный коэффициент интегрирующего усилителя 7. Величина этого коэффициента назначается пропорционально передаточному коэффициенту по рассогласованию Kϑ:

Сигнал σи(t) ограничивается вторым ограничителем сигнала 8, уровень ограничения которого соответствует рассчитанному значению балансировочного отклонения рулей δбал. Ограниченный сигнал интегральной компоненты σогр и(t) со второго ограничителя 8 поступает на сумматор 9, сигнал на выходе которого равен:

и является выходным сигналом устройства.
Введение канала интегральной компоненты - блоков 7, 8, 9 - обеспечивает отработку балансировочной, медленной компоненты сигнала управления ϑзад.м(t). Действительно, пусть ϑзад.б=0; ϑзад.м≠0. Тогда в силу того, что закон формирования выходного сигнала представленного устройства является астатическим законом нулевого порядка, установившееся значение сигнала рассогласования для такого режима

Тогда, в соответствии с (3) установившееся значение ϑуст:

Очевидно также, что для этого режима  Следовательно, и установившееся значение интегральной компоненты σи уст соответствует балансировочному значению угла отклонения рулевых поверхностей ЛА:
Следовательно, и установившееся значение интегральной компоненты σи уст соответствует балансировочному значению угла отклонения рулевых поверхностей ЛА:

Поскольку для рассматриваемого режима Δϑуст=0, ωzуст=0, то и σбуст=0 и σогрбуст=0.
При поступлении на вход прямой цепи устройства (блоки 4, 5, 6, 9) быстрой компоненты сигнала управления ϑзад.б(t) для управления маневром ЛА отработка его будет осуществляться относительно балансировочного движения ЛА и будет симметричной для сигналов ϑзад.б(t) разных знаков, т.е. будет производиться относительно нуля характеристики первого ограничителя 6 (ограничителя прямой цепи формирования управляющего сигнала σвых(t)), что повышает точность отработки управляющих воздействий на ЛА в целом.
Введение ограничения сигнала интегральной компоненты позволяет уменьшить колебательность в замкнутом контуре регулирования и выбросы (перерегулирование) в переходных процессах.
Таким образом, предложенные способ формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата и устройство для его осуществления позволяют расширить функциональные возможности управления летательным аппаратом и повысить при этом точность управления. Сформированы два взаимосвязанных канала, сочетающие в целом управление медленным балансировочным и быстрым маневренным движением ЛА.
Положительный эффект предложения подтвержден результатами анализа и математического моделирования.
Все составные операции способа, звенья и блоки устройства управления могут быть выполнены на современных элементах автоматики и вычислительной техники, а также и программно-алгоритмически в бортовых вычислительных машинах ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459744C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491602C1 |
| Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления | 2016 |
|
RU2631718C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339990C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2469373C1 |
| СПОСОБ ФОРМИРОВАНИЯ НЕЛИНЕЙНОГО АДАПТИВНОГО ЦИФРОАНАЛОГОВОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА СТАБИЛИЗАЦИИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601089C1 |
Изобретение относится к области приборостроения и может найти применение в бортовых системах автоматического управления летательными аппаратами. Технический результат - расширение функциональных возможностей и повышение точности управления. Для достижения данного результата устройство формирования сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата содержит измеритель углового положения, измеритель угловой скорости, последовательно соединенные задатчик сигнала управления, блок сравнения. При этом второй вход блока сравнения соединен с выходом измерителя углового положения, второй вход первого суммирующего усилителя соединен с выходом измерителя угловой скорости. Первый ограничитель сигнала дополнительно содержит последовательно соединенный интегрирующий усилитель. 2 н.п. ф-лы, 1 ил.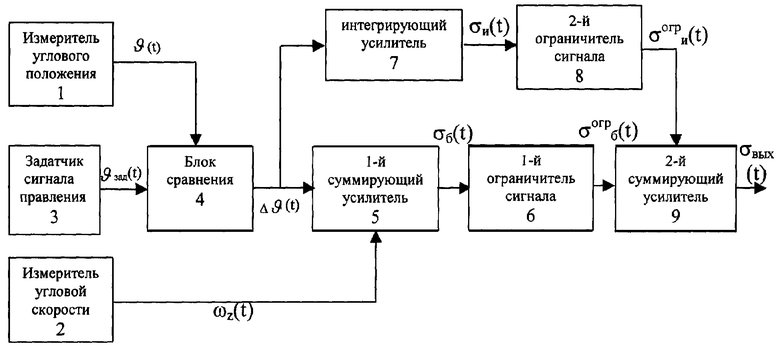
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| МИХАЛЕВ И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174 | |||
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| А.А.Лебедев, В.А.Карабанов | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| - М.: Машиностроение, 1965, с.218-223 | |||
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |

