Изобретение относится к области оптико-электронных систем обработки информации и предназначено для использования в составе охранных систем и систем анализа движения в условиях сложных помех, обусловленных регулярными и временными изменениями освещенности, движением листвы и воды, осадками в виде дождя, снега и т.п.
Известен способ обнаружения движущихся транспортных средств [Dailey D.J., Li L. Video image processing to create a speed sensor. Washington: University of Washington, 1999]. Он включает получение кадров, вычисление разности между кадрами, бинаризацию по порогу, морфологические операции, вычисление оператора Собеля для определения границ объекта.
Недостатками данного способа являются низкая помехоустойчивость, а следовательно, низкая точность обнаружения вследствие заметного влияния изменений в области рабочей сцены, обусловленных временем суток, погодными условиями, появлением новых стационарных объектов в зоне контроля.
Наиболее близким по технической сущности является способ обнаружения движущихся транспортных средств [патент РФ №2262661]. Он включает получение кадров, вычисление разности между кадрами, бинаризацию по порогу, морфологические операции, вычисление оператора Собеля, фиксацию первого кадра, корректировку фона по определенной формуле, определение разности между кадром и фоном, получение гистограммы изображения, нахождения максимума яркости, проверяют разность на наличие объектов, разъединяют сливающиеся объекты, формируют прямоугольники, описывающие положение транспортных средств и их координаты принимают за координаты этих находящихся в кадре средств.
Недостатками данного способа являются: ложное обнаружение теней как объектов - транспортных средств, невозможность определения реального размера обнаруженных объектов. Еще одним недостатком способа является то, что в случае ложного обнаружения объекта или обнаружении объекта, принесенного и оставленного в сцене, обновление модели фона в соответствующих пикселях полностью прекращается, что приводит к невозможности автоматического включения в фон новых статических объектов. Т.о. способ обладает недостаточно высоким качеством определения транспортных средств.
Задачей изобретения является расширение функциональности и повышение качества обнаружения телевизионных охранных систем в сложных климатических условиях и при наличии динамического фона за счет снижения количества ложных срабатываний и повышения точности определения границ движущихся объектов.
Предложен способ обнаружения объектов. Он включает получение кадров, установление фона с последующей его корректировкой, которую осуществляют с помощью постоянной обновления фона ρ, которую в свою очередь выбирают в каждом пикселе в зависимости от обнаружения в нем объекта по правилу:

где 0<ρ1<1, k - коэффициент, 0<=k<=1. После чего вычисляют абсолютную разность между текущим кадром и фоном и проводят бинаризацию с пороговым кадром. Значения пикселей порогового кадра вычисляют по формуле  где k1 - коэффициент, а σi вычисляют по формуле скользящего среднего
где k1 - коэффициент, а σi вычисляют по формуле скользящего среднего  где Ii - текущий кадр, µi - текущий фоновый кадр.
где Ii - текущий кадр, µi - текущий фоновый кадр.
При бинаризации используют правило:
где Ii - текущий кадр. Далее осуществляют пространственную фильтрацию путем формирования зон предварительного обнаружения в бинаризованном кадре.
Зоны предварительного обнаружения, описывающие положение объектов, отбраковывают, оставшиеся разбивают на секции, затем формируют зоны сопровождения независимых частей объектов, часть которых отбраковывают, а оставшиеся объединяют в кластеры, после чего производят отбраковку кластеров. Отбраковку зон и кластеров производят с учетом их метрических размеров и координат. Координаты оставшихся кластеров принимают за координаты объектов.
Обновление фонового кадра с малой постоянной обновления, размер которой выбирают по правилу (1), позволяет автоматически включать в фоновый кадр объекты, находящиеся длительное время в зоне обнаружения в статическом состоянии. Осуществление пространственной фильтрации специальным образом с многоуровневой отбраковкой соответствующих зон и кластеров по заполненности, по метрическим размерам и по координатам позволяет снизить количество ложных срабатываний, отсечь тени, которые отбрасывают объекты, находящиеся в зоне обнаружения, тем самым повысить качество и точность предлагаемого способа. Определение метрических размеров объектов позволяет анализировать траектории движения объектов, что расширяет функциональность системы, реализующей данный способ. Т.о. отличительные признаки являются существенными и необходимыми для решения поставленной задачи.
Для реализации способа можно использовать, например, последовательность кадров, получаемых от стационарной телекамеры как цветных, так и черно-белых. В памяти вычислителя для каждого кадра формируют массив элементов. Для каждой точки изображения в массиве хранят значение яркости, например, отдельно по красному, зеленому и синему каналам (RGB-представление), либо отдельно по каналам YUV, либо по единственному каналу яркости [Л.Шапиро, Дж.Стокман. Компьютерное зрение. Москва: БИНОМ. Лаборатория знаний, 2006, стр.249-259].
Перед началом работы производят первоначальное задание параметров в устройстве, реализующем способ, например с использованием рабочего места оператора:
- параметров калибровки камеры (фокусного расстояния, угла наклона, угла поворота вокруг оси, высоты установки камеры, размера сенсора, разрешения сенсора) - эти параметры могут быть известны из непосредственных измерений, паспортных данных камеры, либо определяться автоматически с использованием известных методов калибровки [Л.Шапиро, Дж.Стокман. Компьютерное зрение. Москва: БИНОМ. Лаборатория знаний, 2006, стр.567-578];
- ширины w и высоты h секций и зон сопровождения, минимальной и максимальной ширины (WCMin, WCMax) и высоты (HCMin, HCMax) объекта, задают координаты зон игнорирования - частей изображения, в которых обнаруженные объекты будут отбракованы;
- постоянной обновления ρ1, коэффициента изменения постоянной обновления k, порогового коэффициента k1;
- коэффициента схожести с фоном CBkg, перекрытия секций и зон сопровождения, коэффициента близости с фоном, степени схожести для поиска зон сопровождения с предыдущих кадров CTrCorr;
- количества кадров, в течение которых будут сохранять зону сопровождения, если она не найдена в текущем кадре, расстояния между зонами сопровождения для формирования кластеров (например, в пикселях), порогового времени жизни кластера LT;
- ширины и высоты зоны сопровождения WMerge, HMerge;
- процента перекрытия для отнесения секции к зоне сопровождения COvr и процент отношения площадей для отбраковки зон сопровождения CARatio.
Далее получают первый кадр, проводят инициализацию фонового кадра, например, нулевыми значениями или, для сокращения времени выхода на рабочий режим первым кадром. Также проводят инициализацию порогового кадра постоянным значением, например, 255, если каждому пикселю порогового кадра соответствует 1 байт.
Далее получают следующий кадр и для каждого нового кадра выполняют:
1) постоянную обновления фона определяют для каждого пикселя в зависимости от наличия в нем обнаруженных объектов по правилу (1). Постоянную обновления выбирают, например, как ρ1=0,001, а коэффициент k=0,1. Постоянную обновления выбирают так, чтобы объекты, подлежащие обнаружению, не сливались с фоновым кадром, и при этом отфильтровывались колебания фона (травы, воды и т.п.) и медленно движущиеся тени. Коэффициент выбирают исходя из желаемого времени обнаружения остановившихся объектов τ:  .
.
2) производят обновление фонового кадра и среднеквадратичного отклонения по формулам экспоненциального скользящего среднего [Achelis, Stcven В. Technical Analysis irom A to Z. McGraw-Hill, 1995, стр.184-192].


где Ii - текущий кадр, Ii-1 - предыдущий кадр, µi - текущий фоновый кадр, µi-1 - предыдущий фоновый кадр,  - текущее значение среднеквадратичного отклонения,
- текущее значение среднеквадратичного отклонения,  - предыдущее значение среднеквадратичного отклонения, i - номер текущего кадра.
- предыдущее значение среднеквадратичного отклонения, i - номер текущего кадра.
3) попиксельно вычисляют абсолютную разность между текущим кадром и фоновым кадром [Л.Шапиро, Дж.Стокман. Компьютерное зрение. Москва: БИНОМ. Лаборатория знаний, 2006, стр.329-331], то есть формируют разностный кадр D:

4) формируют пороговый кадр по формуле:
где k1=3…5 - постоянный коэффициент. Большее значение выбирают для сцен с более интенсивным шумом, меньшее - для статических сцен.
5) производят бинаризацию - сравнение разностного кадра с пороговым кадром по правилу (2) с образованием бинарного кадра r;
6) при использовании цветных кадров цветовые каналы объединяют в один. Например, в случае представления значений пикселей в виде красного, зеленого и синего цветов (RGB - представление [Л.Шапиро, Дж.Стокман. Компьютерное зрение. Москва: БИНОМ. Лаборатория знаний, 2006, стр.249-252], объединение производят по правилу:

где m - результирующее значение, rR, rG и rB - значения в, соответственно, синем, зеленом и красном каналах, «ИЛИ» - функция булевого «ИЛИ», такая, что если значение любого из аргументов отличается от нуля, то результат равняется 1, иначе - 0.
Пространственную фильтрацию осуществляют следующим путем:
7) каким-либо известным способом маркируют все связные области ненулевого значения в бинарном кадре и формируют из них зоны предварительного обнаружения путем построения описывающих прямоугольников, координаты границ которых принимают за координаты зон [Л.Шапиро, Дж.Стокман. Компьютерное зрение. Москва: БИНОМ. Лаборатория знаний, 2006, стр.84-92]. Прямоугольники строят известным способом, выбирая крайние справа, сверху, снизу и слева точки каждой связной области и проводя через них, соответственно, правую, верхнюю, нижнюю и левую стороны прямоугольника (фиг.1);
8) вычисляют метрические размеры зон предварительного обнаружения с использованием, например, калиброванной камеры, и производят отбраковку по ширине wmin, wmax, высоте hmin, hmax кластеров;
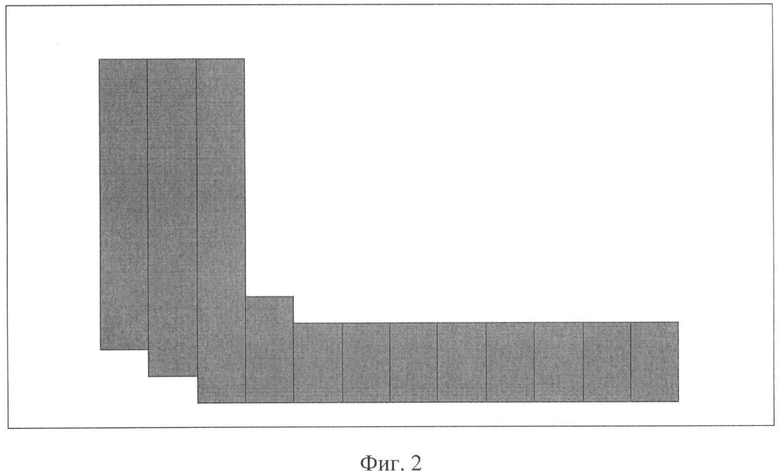
9) зоны предварительного обнаружения в бинарном кадре разбивают на секции одинаковой ширины (фиг.2). Ширину w выбирают на этапе настройки исходя из предполагаемых размеров обнаруживаемых частей объектов. Например, для человека или автомобиля можно выбирать ширину w=0,2 м. Ширину секции в пикселях уточняют с тем, чтобы зона могла быть разделена на целое число секций. Для этого вычисляют количество целых секций ширины w, которое может быть размещено внутри зоны, после чего делят ширину зоны на это количество, получая необходимую ширину секции;
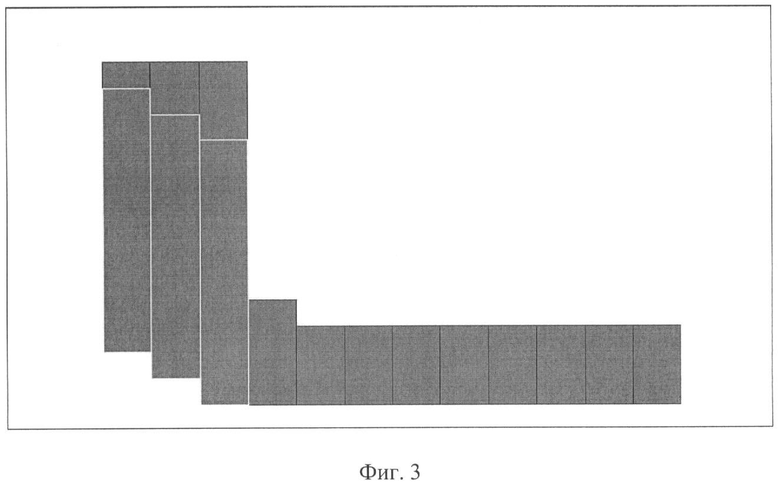
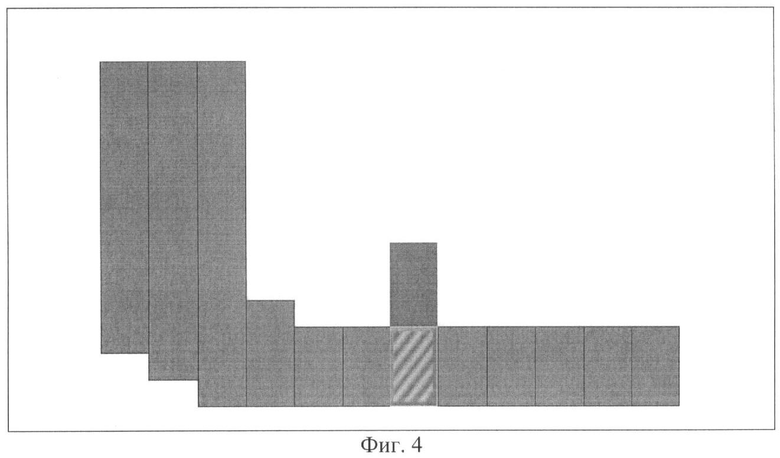
10) из секций формируют новые зоны сопровождения (фиг.3). Для этого сначала на месте секции, расположенной ближе всего к нижней центральной точке кадра, создают зону сопровождения предварительно заданной метрической высоты h (например, h=0,8 м - для человека, с тем, чтобы он был обнаружен, даже если половина его скрыта кустами, сливается с фоном или не обнаруживается по другим причинам) метрической ширины w. После этого для каждой секции вычисляют площадь перекрытия с зоной сопровождения (фиг.4). Если отношение этой площади к площади секции превышает заданный порог, например, 60%, то секцию относят к этой зоне сопровождения. Процедуру повторяют до тех пор, пока остаются неохваченные секции.
11) для каждой зоны сопровождения вычисляют суммарную площадь секций, отнесенных к ней, и суммарную площадь перекрытия. Зону сопровождения, для которой отношение суммарной площади перекрытия к суммарной площади секций превышает заданный порог, например, 50%, считают достоверной, а все секции, отнесенные к ней, исключают из дальнейшей обработки. В противном случае зону сопровождения отбраковывают.
12) производят сравнение зон сопровождения с фоновым кадром, например, посредством вычисления функции корреляции, и зоны, для которых значение функции корреляции превышает заданный порог (60%), отбраковывают. Производят поиск (например, корреляционный) в текущем кадре зон сопровождения, сформированных на предыдущих кадрах. Зоны, для которых значение функции схожести (корреляции) при каком-либо смещении превышает заданный порог, например, 70% (т.е. найдено соответствие), добавляют к списку новых зон сопровождения. Зоны, для которых соответствие не найдено более чем в Nmiss=5 последовательных кадров, отбраковывают [Л.Шапиро, Дж.Стокман. Компьютерное зрение. Москва: БИНОМ. Лаборатория знаний, 2006, стр.219-225];
13) близко расположенные новые зоны сопровождения объединяют в кластеры. Например, объединяют в один кластер зоны сопровождения, расстояние между границами которых меньше заданного, например 5 пикселей или 10 сантиметров;
14) вычисляют метрические размеры кластеров с использованием, например, калиброванной камеры, и производят отбраковку по ширине WCMin, WCMax, высоте HCMin, HCMax кластеров и по положению относительно заданных зон игнорирования [Л.Шапиро, Дж.Стокман. Компьютерное зрение. Москва: БИНОМ. Лаборатория знаний, 2006, стр 578-580]. Например, если нижняя средняя точка кластера («ноги») попадает внутрь заданной зоны игнорирования, то такой кластер отбраковывают;
15) время жизни кластера определяют как число кадров, в течение которых обнаруживают кластер. Для этого производят сравнение оставшихся кластеров с кластерами, сохраненных в предыдущих кадрах. Для кластеров, для которых найдены пары, близкие по координатам и размерам, записывают значение счетчика кадров, в течение которых обнаруживается кластер, из старого кластера, увеличенное на единицу. Кластеры, для которых счетчик кадров меньше заданного порога, например, 40, сохраняют, но исключают из дальнейшей обработки на данном шаге цикла. Порог выбирают экспериментально, таким образом, чтобы отбраковать короткоживущие ложно обнаруживаемые объекты. Для кластеров, для которых не найдены пары с предыдущих кадров, устанавливают значение времени жизни = 1, что дает первоначальное значение для последующих кадров.
16) координаты кластеров, прошедших отбраковку, принимают за координаты находящихся в кадре объектов.
Пример конкретного выполнения
Берут последовательность черно-белых телевизионных кадров от камеры видеонаблюдения и подают их один за другим на вход устройства, реализующего способ. С использованием методов калибровки определяют по одному из кадров и паспортным значениям камеры параметры калибровки: синус и косинус угла наклона камеры sin(α)=0,997564, cos(α)=0,069756, высоту установки камеры H=4 м, синус и косинус угла поворота камеры sin(β)=0, cos(β)=1, метрический размер пикселя Wpx = 0,0003, Hpx = 0,0003, фокусное расстояние камеры f=0,24, высоту линии горизонта на кадре Hhor=55.
Задают постоянную обновления ρ1=0,005, коэффициент k=0,2, коэффициент k1=3. Задают ограничения на размеры зон предварительного обнаружения в метрах: wmin=0,1, wmax=2, hmin=0,1, hmax=3.
Задают пороговый коэффициент схожести с фоном СBkg=70%, коэффициент расширения зоны сопровождения при формировании зоны поиска в ширину СTrWExp = 1 и в высоту СTrHExp = 1, т.е. определяют, что поиск будут производить в области, получаемой расширением зоны сопровождения на полуширину вправо и влево и на одну ее высоту вверх.
Задают степень схожести для поиска зон сопровождения с предыдущих кадров СTrCorr=60%.
Задают коэффициент заполнения зон сопровождения СTrFill = 30%.
Задают коэффициент перекрытия зон CZOvr = 95%.
Задают количество кадров, в течение которых будут сохранять зону сопровождения, если она не найдена в текущем кадре, Nmf=1.
Задают расстояние между зонами сопровождения для формирования кластеров СF=5 пикселей.
Задают пороговое время жизни кластера LT=40 кадров.
Задают допустимую ширину и высоту кластера WCMin=0, WCMax=2 м, HCMin=0, HCMax=4 м.
Задают ширину и высоту зоны сопровождения WMerge=0,2 м, HMerge=0,8 м.
Задают процент перекрытия для отнесения секции к зоне сопровождения СOvr = 10% и процент отношения площадей для отбраковки зон сопровождения СARatio = 50%.
Берут первый кадр со значениями  и используют его для инициализации фонового кадра B1=I1. Здесь и далее верхние индексы соответствуют координатам пикселя в пределах кадра: первый индекс - столбец, второй - строка, третий - R, G или В - цветовой канал. Устанавливают значения пикселей порогового кадра равными 255 в каждом цветовом канале:
и используют его для инициализации фонового кадра B1=I1. Здесь и далее верхние индексы соответствуют координатам пикселя в пределах кадра: первый индекс - столбец, второй - строка, третий - R, G или В - цветовой канал. Устанавливают значения пикселей порогового кадра равными 255 в каждом цветовом канале: 
Берут второй кадр со значениями  Производят обновление фонового и порогового кадра по формулам (3, 4, 6). Получают
Производят обновление фонового и порогового кадра по формулам (3, 4, 6). Получают 

Вычисляют разностный кадр D по формуле (5) и получают 
Производят бинаризацию его с использованием порогового кадра:

Объединяют цветовые каналы по правилу ИЛИ и получают:
 .
.
Маркируют связные области и получают количество областей = 0. Дальнейшую обработку для второго кадра не выполняют.
Для кадров с третьего по 9750 производят аналогичные действия.
Берут кадр 9751 со значениями 
Производят обновление фонового и порогового кадра по формулам (3, 4, 6).
Получают


Вычисляют разностный кадр D по формуле (5) и получают

Производят бинаризацию его с использованием порогового кадра:
 Объединяют цветовые каналы по правилу ИЛИ и получают:
Объединяют цветовые каналы по правилу ИЛИ и получают:

Маркируют связные области ненулевого значения и получают количество областей = 928.
Формируют зоны предварительного обнаружения путем построения описывающих прямоугольников: Dz0={62,14,62,15}, …, Dz927={200,238,203,239}, где координаты приведены в следующем порядке:
{левая граница по горизонтали, верхняя граница по вертикали, правая граница по горизонтали, нижняя граница по вертикали}.
Вычисляют размер каждой зоны в метрах и получают: ширина Dz0=1,38 м, высота Dz0=2,66 м, …, ширина Dz927=0,11 м, высота Dz927=0,10 м.
Отбраковывают предварительные зоны обнаружения по размерам и получают 119 зон.
Зоны предварительного обнаружения в бинарном кадре разбивают на секции. Получают 149 секций с координатами: Sz0={11,14,11,14}, …, Sz148={200,238,203,239}.
Из секций формируют новые зоны сопровождения. Для этого сначала на месте секции, расположенной ближе всего к нижней центральной точке кадра, то есть секции с координатами {118, 128, 121, 163}, создают зону сопровождения предварительно заданной метрической высоты 0,8 м ширины 0,2 м. Получают зону сопровождения с координатами {117, 150, 121, 163}. Соответствующую секцию исключают из дальнейшей обработки.
После этого для каждой оставшейся секции вычисляют площадь перекрытия с зоной сопровождения. Для секции с координатами {113, 126, 117, 165} получают площадь перекрытия 14. Площадь самой секции 169. Так как отношение этой площади к площади секции не превышает заданный порог 10%, то секцию не относят к зоне сопровождения. Процедуру повторяют для оставшихся секций.
Процедуру формирования зон сопровождения повторяют до тех пор, пока остаются неохваченные секции.
Вычисляют отношение суммарной площади секций, отнесенных к каждой зоне сопровождения, к суммарной площади перекрытия секций с зоной сопровождения. Для зоны сопровождения с координатами {1,18, 1,18} получают величину 0,97. Так как эта величина больше заданного порога, то зону сопровождения, таким образом, считают достоверной.
Получают, что в текущем кадре имеется одна зона сопровождения с координатами {1,18, 1,18}.
Объединяют в один кластер зоны сопровождения, расстояние между границами которых меньше 5 пикселей. В данном случае формируют один кластер Сl0={1,18, 1,18}.
Вычисляют метрические размеры кластера с использованием калиброванной камеры. Получают ширину кластера 0,83 м, высоту - 0,81 м.
Производят отбраковку по ширине WCMin, WCMax и высоте HCMin, HCMax кластеров. Кластер проходит отбраковку, поэтому продолжают дальнейшую обработку.
Так как зон игнорирования не задано, то отбраковки по положению относительно них не производят.
Время жизни кластера определяют как число кадров, в течение которых обнаруживают кластер. Для этого производят сравнение оставшихся кластеров с кластерами, сохраненными в предыдущих кадрах.
Так как ранее кластеров обнаружено не было, то устанавливают для кластера Сl0 значение времени жизни 1.
Так как эта величина не превышает заданного порогового значения 40, то обработку на этом кадре заканчивают, но сохраняют кластер для следующих кадров.
Производят аналогичные вычисления для каждого следующего кадра до кадра 9819.
Берут кадр 9820 со значениями

Производят обновление фонового и порогового кадра по формулам (3, 4, 6). Получают


Вычисляют разностный кадр D по формуле (5) и получают

Производят бинаризацию его с использованием порогового кадра:

Объединяют цветовые каналы по правилу ИЛИ и получают:

Маркируют связные области ненулевого значения и получают количество областей = 837.
Формируют зоны предварительного обнаружения путем построения описывающих прямоугольников: Dz0={115, 19, 116, 22}, …, Dz836={4, 163, 12, 167}, где координаты приведены в следующем порядке: {х - левая граница, y - верхняя граница, х - правая граница, y - нижняя граница}.
Вычисляют размер каждой зоны в метрах и получают: ширина Dz0=1,38 м, высота Dz0=2,66 м, ширина Dz836=0,36 м, высота Dz836=0,29 м.
Отбраковывают предварительные зоны обнаружения по размерам и получают 78 зон.
Зоны предварительного обнаружения в бинарном кадре разбивают на секции. Получают 109 секций с координатами: Sz0={115, 21, 115, 22}, …, Sz148={4, 163, 12, 167}.
Из секций формируют новые зоны сопровождения. Для этого сначала на месте секции, расположенной ближе всего к нижней центральной точке кадра, то есть секции с координатами {100, 135, 104, 165}, создают зону сопровождения предварительно заданной метрической высоты 0,8 м ширины 0,2 м. Получают зону сопровождения с координатами {100, 152, 104, 165}. Соответствующую секцию исключают из дальнейшей обработки.
После этого для каждой оставшейся секции вычисляют площадь перекрытия с зоной сопровождения. Для секции с координатами {100, 135, 104, 165} получают площадь перекрытия 155. Площадь самой секции 155. Так как отношение этой площади к площади секции превышает заданный порог 10%, то ее относят к этой зоне сопровождения.
Другие секции не относят к этой зоне сопровождения, так как пересечения нет.
Процедуру повторяют до тех пор, пока остаются неохваченные секции.
Вычисляют отношение суммарной площади секций, отнесенных к каждой зоне сопровождения, к суммарной площади перекрытия секций с зоной сопровождения. Для зоны сопровождения с координатами {100, 152, 104, 165} получают величину 1. Так как эта величина больше заданного порога, то зону сопровождения, таким образом, считают достоверной.
В результате получают 37 зон сопровождения с координатами: {108, 149, 112, 162}, {139, 69, 140, 76}, …, {2, 26, 2, 27}.
Производят сравнение зон сопровождения с фоновым кадром посредством вычисления нормированной корреляции и для зоны с координатами {116, 21, 116, 22} получают, что сходство не превышает пороговых 60%, поэтому зону сопровождения сохраняют, а все прочие зоны отбраковывают, так как для них сходство с фоном превышает 60%.
После формирования новых зон сопровождения получают одну зону с координатами {116, 21, 116, 22}.
Производят поиск в текущем кадре зон сопровождения, сформированных на предыдущих кадрах. Зоны, для которых значение функции схожести при каком-либо смещении превышает заданный порог, 70% (т.е. найдено соответствие), добавляют к списку новых зон сопровождения. Зоны, для которых соответствие не найдено, отбраковывают.
Обнаруживают соответствие для 24 зон сопровождения и добавляют их к списку новых зон сопровождения.
Таким образом, получают 25 зон сопровождения с координатами: Тr0={35, 132, 39, 145}, Тr1={35,125, 39, 138}, …, Тr24={116, 21, 116, 22}.
Объединяют в один кластер зоны сопровождения, расстояние между границами которых меньше 5 пикселей. В данном случае формируют четыре кластера: Сl0={30, 125, 39, 159}, Cl1={96, 125, 109, 166}, Cl2={63, 116, 63, 157}, Сl3={116, 21, 116, 22}.
Вычисляют метрические размеры кластеров с использованием калиброванной камеры. Получают: для Сl0 ширину кластера 0,21 м, высоту - 0,79 м, для Cl1 ширину кластера 0,20 м, высоту - 0,78 м, для Сl2 ширину кластера 0,38 м, высоту - 1,89 м, для Сl3 ширину кластера 0,54 м, высоту - 1,06 м.
Производят отбраковку по ширине wmin, wmax, hmin, hmax кластеров.
Кластер проходит отбраковку, поэтому продолжают дальнейшую обработку.
Так как зон игнорирования не задано, то отбраковки по положению относительно них не производят.
Время жизни кластера определяют как число кадров, в течение которых обнаруживают кластер. Для этого производят сравнение оставшихся кластеров с кластерами, сохраненных в предыдущих кадрах.
Для кластера Сl0 находят, что близкого по координатам кластера ранее обнаружено не было. Поэтому устанавливают ему время жизни = 1. Обработку кластера на этом кадре заканчивают, но сохраняют кластер для следующих кадров.
Для кластера Cl1 находят, что ранее был обнаружен кластер с координатами {95, 126, 108, 166} и принимают решение, что это тот же самый кластер. Переписывают из него время жизни кластера, увеличивая его на единицу и получая 26. Так как эта величина не превышает заданного порогового значения 40, то обработку на этом кадре заканчивают, но сохраняют кластер для следующих кадров.
Для кластера Cl2 находят, что ранее был обнаружен кластер с координатами {53, 116, 63, 157} и принимают решение, что это тот же самый кластер. Переписывают из него время жизни кластера, увеличивая его на единицу, и получают 41. Так как эта величина превышает заданное пороговое значение 40, то координаты кластера принимают за координаты находящегося в кадре объекта.
Для кластера Сl3 находят, что близкого по координатам кластера ранее обнаружено не было. Поэтому устанавливают ему время жизни = 1. Обработку кластера на этом кадре заканчивают, но сохраняют кластер для следующих кадров.
Тем самым, принимают решение об обнаружении на текущем кадре объекта с экранными координатами {63, 116, 63, 157}, с метрическим размером 0,38 на 1,89 м.
Производят аналогичные вычисления для каждого следующего кадра.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| Способ анализа видеопотока | 2018 |
|
RU2676026C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОСТОРОННИХ ИЗОБРАЖЕНИЙ НА БАНКНОТЕ | 2019 |
|
RU2700737C1 |
| Способ помехоустойчивого обнаружения дыма и пламени в сложной фоно-световой обстановке | 2021 |
|
RU2760921C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ СЛАБОИЗЛУЧАЮЩИХ ПОДВИЖНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ НА ПРОСТРАНСТВЕННО-НЕОДНОРОДНОМ ФОНЕ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ | 2013 |
|
RU2536082C1 |
| Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне | 2015 |
|
RU2634374C2 |
| СПОСОБ ИЗМЕРЕНИЯ И КОНТРОЛЯ ЩЕЛЕВЫХ ЗАЗОРОВ ПРОТИВОПЕСОЧНЫХ ФИЛЬТРОВ И ИНСПЕКЦИОННАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2022 |
|
RU2791144C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОЯВЛЕНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИЯХ | 2011 |
|
RU2465649C1 |
Изобретение относится к обнаружению объектов. Способ обнаружения объектов содержит этапы получения кадров, инициализации фонового кадра, инициализации порогового кадра. Далее для каждого из полученных кадров выполняют вычисление разности между текущим кадром и фоновым кадром, бинаризацию с пороговым кадром, пространственную фильтрацию, обеспечивающую обнаружение объектов. При этом корректировку фонового кадра осуществляют с помощью постоянной обновления фонового кадра ρ, которую в свою очередь выбирают в каждом пикселе в зависимости от обнаружения в нем объекта по правилу:

где 0<ρ1<1, k - коэффициент, 0<=k<=1. А пороговый кадр вычисляют по формуле 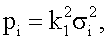 где k1 - коэффициент, а дисперсию σi обновляют по формуле
где k1 - коэффициент, а дисперсию σi обновляют по формуле  где Ii - текущий кадр, µi - текущий фоновый кадр, i - номер кадра. Заявленное изобретение направлено на повышение качества обнаружения телевизионных охранных систем в сложных климатических условиях и при наличии динамического фона, уменьшение количества ложных срабатываний. 4 ил.
где Ii - текущий кадр, µi - текущий фоновый кадр, i - номер кадра. Заявленное изобретение направлено на повышение качества обнаружения телевизионных охранных систем в сложных климатических условиях и при наличии динамического фона, уменьшение количества ложных срабатываний. 4 ил.
Способ обнаружения объектов, включающий получение кадров, инициализацию фонового кадра, инициализацию порогового кадра, и для каждого кадра выполняют вычисление разности между текущим кадром и фоновым кадром, бинаризацию с пороговым кадром, пространственную фильтрацию, которую осуществляют путем формирования зон предварительного обнаружения в бинаризованном изображении, вычисление размеров зон предварительного обнаружения и произведение отбраковки по ширине Wmin, Wmax, высоте hmin, hmax, оставшиеся разбивают на секции, из секций формируют зоны сопровождения, часть которых отбраковывают, формируют кластеры зон сопровождения, объединяя близко расположенные зоны сопровождения, вычисляют размеры, координаты и время жизни кластеров, которое определяется как число кадров, в течение которых обнаруживают кластер, производят отбраковку кластеров, и координаты оставшихся кластеров принимают за координаты находящихся в кадре объектов, осуществляют корректировку фонового кадра с помощью постоянной обновления фонового кадра ρ, которую, в свою очередь, выбирают в каждом пикселе в зависимости от обнаружения в нем объекта по правилу:

где 0<ρ1<1, k - коэффициент, 0≤k≤1, вычисляют пороговый кадр по формуле  где k1 - коэффициент, а дисперсию σi обновляют по формуле
где k1 - коэффициент, а дисперсию σi обновляют по формуле  где Ii - текущий кадр, µi - текущий фоновый кадр, i - номер кадра.
где Ii - текущий кадр, µi - текущий фоновый кадр, i - номер кадра.
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2000 |
|
RU2262661C2 |
| RU 2193825 C2, 27.11.2002 | |||
| Станок для шлифования линз | 1940 |
|
SU61890A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1992 |
|
RU2031545C1 |
| US 4739401 А, 19.04.1988. | |||

