Изобретение относится к системе автоматического регулирования частоты вращения двигателя и, в частности, к системе автоматического регулирования частоты вращения двигателя, быстро достигающей заданной частоты вращения и поддерживающей ее постоянной независимо от изменений загрузки двигателя.
В классических линейных системах автоматического регулирования с обратной связью, применяемых для автоматической стабилизации частоты вращения двигателя, команды на изменение частоты вращения двигателя вырабатываются на основе разности между заданной и измеренной частотой вращения двигателя. Поэтому в таких системах сигнал текущего положения дроссельного механизма не вырабатывается до тех пор, пока не установлено рассогласование частоты вращения двигателя.
Некоторые типы двигателей, такие как карбюраторные ротационные двигатели, работают в широком диапазоне частот вращения, и соотношение между мощностью на выводном валу двигателя и расходом топлива имеет отчетливо нелинейный характер. Для такого двигателя линейная система автоматического регулирования с обратной связью в чистом виде не обеспечивает идеально точного регулирования, особенно - в режиме стабилизации частоты вращения двигателя. В подобной линейной системе автоматического регулирования с обратной связью время реакции на внешние возмущения неприемлемо велико. Скорость реакции линейной системы автоматического регулирования с обратной связью можно повысить за счет увеличения коэффициентов усиления в системе регулирования, однако это может повлечь за собой снижение устойчивости системы.
Из европейского патентного документа EP-A-155748 известен способ регулирования скорости холостого хода двигателя внутреннего сгорания, приводящего генератор электрического тока, с обратной связью. При регулировании скорости холостого хода двигателя внутреннего сгорания с обратной связью в соответствии с этим документом на начальном этапе работы загрузочного устройства из-за большой электрической нагрузки двигатель может заглохнуть. Этот способ не применяется для регулирования двигателя на повышенных режимах (выше холостого хода), поскольку в этом случае изменения электрической загрузки точно отслеживаются, поэтому необходимость регулирования холостого хода с обратной связью отпадает. Для решения проблемы запуска большой электрической нагрузки в режиме холостого хода двигателя внутреннего сгорания в соответствии с упомянутой европейской заявкой измеряется значение сигнала режима генерирования тока, измеряется сигнал действительной частоты вращения двигателя, согласно измеренному значению сигнала режима генерирования тока и действительной частоты вращения двигателя задается значение коррекции электрической нагрузки, и корректируется расход топлива холостого хода в соответствии с заданным значением коррекции электрической нагрузки.
В японском патентном документе JP-A-1203636 также рассматривается решение задачи регулирования холостого хода двигателя при изменении нагрузки на генератор.
Это означает, что задача точного регулирования дроссельного механизма двигателя, обеспечивающего его быструю реакцию на резкое возрастание нагрузки, остается актуальной.
В соответствии с изобретением разработана система автоматического регулирования частоты вращения двигателя, которая быстро набирает заданную скорость и поддерживает ее постоянной независимо от изменений загрузки двигателя.
Изобретение также позволяет системе автоматического регулирования частоты вращения двигателя для двигателя, работающего в широком диапазоне рабочих скоростей, свести к минимуму время реакции двигателя на изменения заданной частоты вращения двигателя и заданной загрузки двигателя.
Кроме того, система автоматического регулирования частоты вращения двигателя по изобретению вырабатывает упреждающие сигналы об изменении загрузки двигателя, снижая тем самым колебания частоты вращения двигателя, обусловленные изменением загрузки двигателя.
В соответствии с настоящим изобретением сигнал рассогласования частоты вращения двигателя вычисляется как разность заданной оператором частоты вращения двигателя и действительной частоты вращения двигателя, сигнал рассогласования частоты умножается на коэффициент усиления рассогласования частоты вращения двигателя, после чего усиленный сигнал рассогласования частоты вращения двигателя подается через интегрирующее звено и пропорциональное звено на суммирующий узел, где он суммируется с упреждающими сигналами настройки режима по загрузке двигателя, в результате чего вырабатывается конечный сигнал настройки режима работы двигателя.
Далее, согласно изобретению упреждающие сигналы настройки режима по загрузке представляют собой сигналы прямой связи, заранее сигнализирующие двигателю об изменениях заданной загрузки, в результате сложения усиленного сигнала рассогласования скорости (сигнала настройки режима работы двигателя) и упреждающих сигналов коррекции настройки режима работы двигателя формируется команда положения дроссельного механизма (конечный сигнал настройки режима работы двигателя), регулирующая расход топлива и воздействующая тем самым на частоту вращения двигателя.
Кроме того, согласно изобретению коэффициент усиления рассогласования частоты вращения двигателя определяют, исходя из загрузки двигателя, после чего значение коэффициента усиления ограничивают по текущей частоте вращения двигателя.
Настоящее изобретение по сравнению с предшествующим уровнем техники обладает существенными преимуществами, касающимися более быстрой реакции на входные управляющие сигналы за счет упреждающих сигналов настройки режима по загрузке двигателя при поддержании коэффициентов усиления управляющих сигналов на уровнях, оптимальных для текущего режима работы двигателя. Поэтому ради повышения приемистости системы автоматического регулирования не приходится жертвовать коэффициентами усиления управляющих сигналов, а значит - и устойчивостью всей системы. Сигналы прямой связи имеют упреждающее воздействие на дроссельный механизм, и при поступлении входных управляющих сигналов изменения загрузки двигателя они без запаздывания командуют исполнительному устройству дроссельного механизма на установку дозирующего клапана в соответствующее положение. В отличие от большого времени запаздывания регулятора, работающего только по обратной связи, который при изменении заданного значения регулируемого параметра должен дождаться появления сигнала рассогласования и только после этого формирует соответствующий сигнал настройки режима, предложенный регулятор быстро выводит двигатель на заданный режим. Кроме того, изменение коэффициентов усиления регулятора частоты вращения двигателя по установленной программе обеспечивает оптимизацию значений коэффициентов усиления, используемых законами управления, при конкретном режиме работы двигателя.
Описанные выше возможности настоящего изобретения, его особенности и преимущества более наглядно отражены в подробном описании типовых вариантов его осуществления со ссылкой на прилагаемые чертежи.
Фиг.1 - вид в аксонометрической проекции, с частичным разрезом, беспилотного летательного аппарата (БЛА) с системой автоматического регулирования частоты вращения двигателя согласно настоящему изобретению.
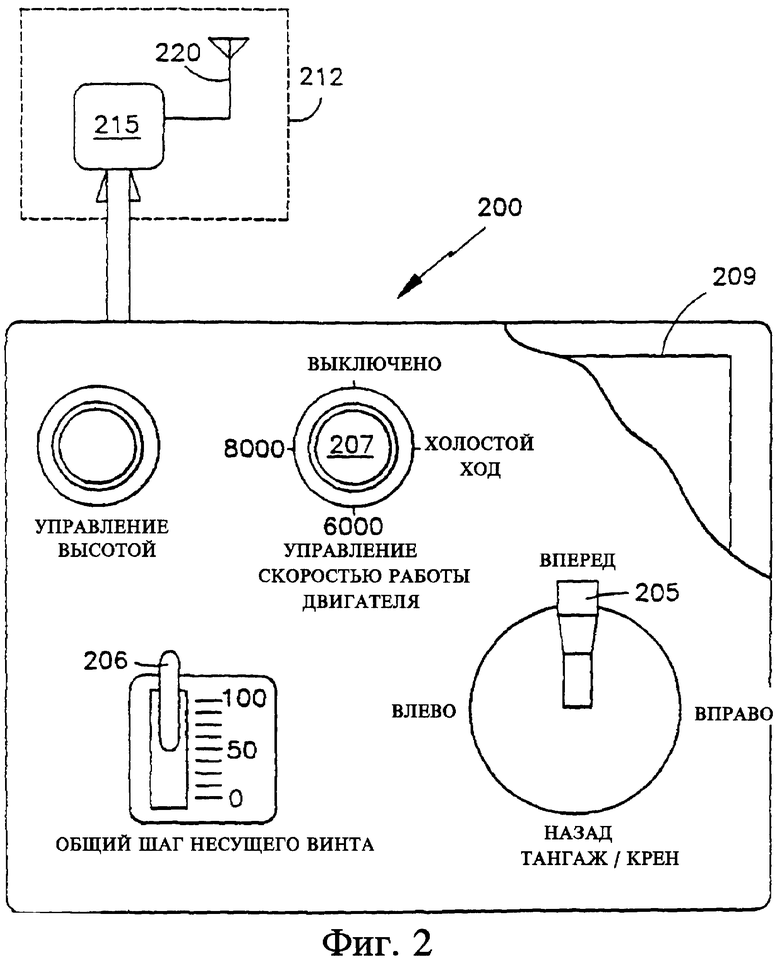
Фиг. 2 - схематическое изображение, с частичным вырезом, пульта дистанционного управления летательным аппаратом, изображенного на фиг.1.
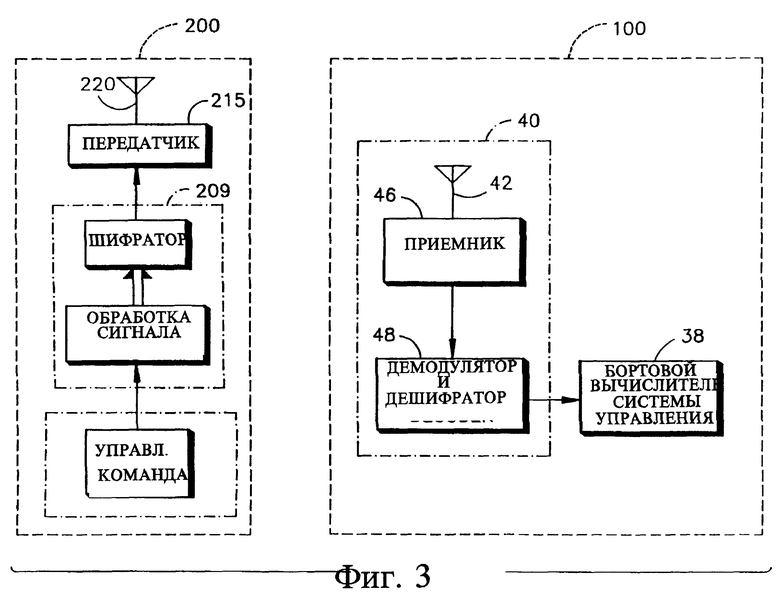
Фиг.3 - структурная схема передачи управляющих сигналов с пульта оператора, изображенного на фиг.2, на дистанционно управляемый летательный аппарат, изображенный на фиг.1.
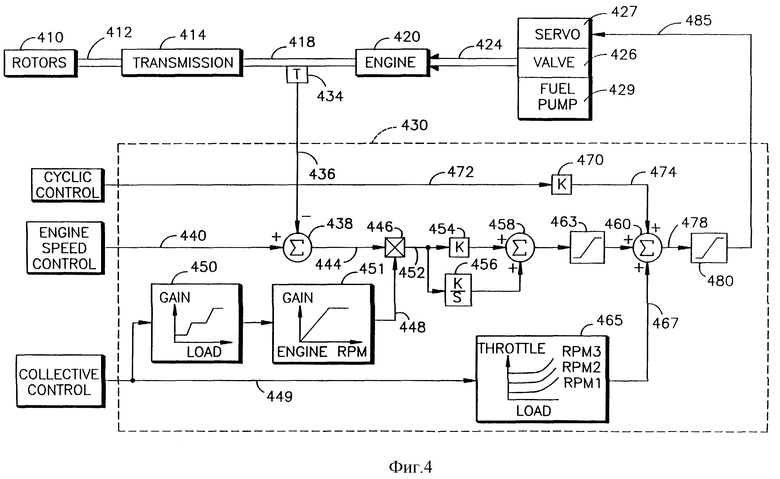
Фиг. 4 - структурная схема системы автоматического регулирования частоты вращения двигателя согласно настоящему изобретению.
Система автоматического регулирования частоты вращения двигателя согласно изобретению особенно удобна тем, что позволяет двигателю быстро набирать заданную частоту вращения и впоследствии поддерживать ее постоянной независимо от изменений загрузки двигателя. Система автоматического регулирования двигателя согласно настоящему изобретению описывается применительно к карбюраторному ротационному двигателю, устанавливаемому на БЛА, который подобен показанному на фиг.1. Такой двигатель работает в широком диапазоне рабочих скоростей, и соотношение между мощностью на выводном валу и расходом топлива является нелинейным. Однако специалисту понятно, что система регулирования согласно изобретению применима на любом типе двигателя, работающего в широком диапазоне рабочих скоростей и для которого соотношение между мощностью двигателя и расходом топлива является нелинейным.
На фиг.1 представлен вариант исполнения БЛА 100. Рассматриваемый в изобретении в качестве примера БЛА имеет тороидальный фюзеляж или корпус 20, силовую установку 50 и несущий винт 60. На тороидальном фюзеляже 20 расположено несколько стоек 24, соединенных с несущим винтом 60 и центрирующих его относительно тороидального фюзеляжа 20. Спереди тороидального фюзеляжа 20 расположены передние отсеки 26, используемые обычно для размещения различного полетного и специального оборудования 30, как описывается далее. Полетное и специальное оборудование 30, включающее в себя радиоэлектронные блоки 34, навигационное оборудование 36, бортовой вычислитель 38, блоки 40 системы обмена данными (для передачи данных с датчиков летательного аппарата и приема входных управляющих сигналов в масштабе реального времени), антенну 42 и т.д., распределено по нескольким внутренним отсекам 26, как показано, например, на фиг.1. Оптимизация распределения полетного и специального оборудования 30 увязана с расположением силовой установки 50 внутри тороидального фюзеляжа 20.
Состав полетного и специального оборудования 30, указанный выше, является типовым, обычно устанавливаемым на БЛА. В то же время специалисту должно быть очевидным, что само по себе наличие вычислителя ручной системы управления, бортового радиоэлектронного оборудования и навигационной системы недостаточно для осуществления функций, выполняемых настоящим изобретением.
На фиг.2 изображен пульт 200 дистанционного управления оператора, управляющего полетом БЛА, представленного на фиг. 1. Пульт дистанционного управления вырабатывает сигналы, управляющие режимом работы двигателя и аэродинамическими поверхностями БЛА и, в конечном итоге, управляющие режимом полета БЛА. В рассматриваемом случае в загрузку двигателя наибольший вклад вносит изменение общего шага лопастей несущего винта. При увеличении общего шага лопастей несущего винта возрастает тяга винта или подъемная сила, создаваемая его лопастями. Аналогично при уменьшении общего шага лопастей несущего винта подъемная сила, создаваемая его лопастями, уменьшается. Кроме того, при заданном значении общего шага загрузка двигателя может быть значительно увеличена или уменьшена путем соответственно увеличения или уменьшения его рабочей скорости. Другим существенным фактором загрузки двигателя является циклический шаг лопастей несущего винта. Изменением циклического шага лопастей несущего винта осуществляется изменение направления полета БЛА. Пульт 200 дистанционного управления имеет рычаг 205 управления циклическим шагом, применяя который, оператор может посылать БЛА управляющие сигналы по циклическому шагу. В показанном на чертежах исполнении рычаг 205 управления циклическим шагом имеет две степени свободы. Перемещением рычага вперед-назад БЛА управляется по тангажу, а перемещением рычага влево-вправо БЛА управляется по крену. Для управления общим шагом несущего винта БЛА предусмотрен рычаг 206 управления общим шагом, а для управления оборотами двигателя БЛА на пульте дистанционного управления предусмотрена рукоятка управления 207 частотой вращения двигателя. С пульта дистанционного управления с помощью этой рукоятки задается желаемая частота вращения двигателя (базовое число оборотов двигателя), которую двигатель БЛА старается поддерживать. Вычислитель 209 пульта дистанционного управления предназначен для приема команд управления, поступающих с рычагов 205 управления циклическим шагом, общим шагом 206, рукоятки 207 управления частотой вращения двигателя, и их преобразования в сигналы, передаваемые посредством связного оборудования 212. В состав связного оборудования 212 входит передатчик 215, воспринимающий управляющие сигналы от вычислителя 209 пульта дистанционного управления и передающий эти управляющие сигналы через антенну 220 пульта дистанционного управления.
На фиг.3 видно, что управляющие сигналы, посланные с антенны 220 пульта дистанционного управления, принимаются антенной 42 БЛА, после чего передаются на связное оборудование 40 БЛА. В состав связного оборудования 40 БЛА входят приемник 46 и демодулятор/дешифратор 48, принимающий и расшифровывающий сигналы, переданные оператором с пульта дистанционного управления. Затем демодулированные и расшифрованные сигналы поступают в бортовой вычислитель 38 системы управления полетом БЛА. В нем управляющие сигналы обрабатываются и преобразуются во входные сигналы управления скоростью работы двигателя и отклонения аэродинамических поверхностей БЛА. БЛА, следуя этим сигналам, должен выполнять заданные маневры.
Как показано на фиг.4, роторы 410 винтов соединяются посредством вала 412 с редуктором 414 (трансмиссией), который, в свою очередь, приводится от выводного вала 418 двигателя 420. Топливо подводится в работающий двигатель через дозирующий клапан 426 по линиям 424 топливопитания. Исполнительное устройство 427 дроссельного механизма управляет положением дозирующего клапана 426, обеспечивая требуемый расход топлива, подкачиваемого насосом 429, в линии 424 топливопитания.
Приведенное описание относится к типовой конструкции двигателя и связанных с ним технических устройств, совместно с которыми должна функционировать система автоматического регулирования частоты вращения двигателя, выполненная согласно настоящему изобретению.
В системе автоматического регулирования частоты вращения двигателя 420 вырабатываются сигналы положения дроссельного механизма (конечные сигналы настройки режима) и поступают на исполнительное устройство 427 дроссельного механизма, которое управляет дозирующим клапаном 426. Система автоматического регулирования частоты вращения двигателя 430 обычно старается поддерживать заданный расход топлива в линиях 424 топливопитания с тем, чтобы стабилизировать заданную желаемую скорость двигателя (например, частоту вращения его выводного вала 418), измеряемую датчиком частоты вращения двигателя 34. Датчик частоты вращения двигателя 434 передает сигнал действительной скорости по линии 436 в суммирующий узел 438. С другой стороны в суммирующий узел по линии 440 поступает сигнал заданной частоты вращения двигателя (с пульта дистанционного управления оператора). На выходе суммирующего узла 438 формируется сигнал рассогласования частоты вращения двигателя, передаваемый по линии 444 в усиливающую функцию 446.
В усиливающую функцию 446 по линии 448 также входит сигнал коэффициента усиления рассогласования частоты вращения двигателя. Сигнал коэффициента усиления рассогласования скорости формируется в результате наложения сигнала заданного общего шага несущего винта (с пульта дистанционного управления оператора), поступающего по линии 449, на передаточную функцию 450. Передаточная функция 450 вырабатывает сигнал коэффициента усиления с коррекцией по сигналу заданного общего шага. Затем коэффициент усиления проходит через ограничительную функцию 451, ограничивающую его значение в зависимости от частоты вращения двигателя. В результате комбинирования передаточной функции 450 и ограничительной функции 451 создана программа изменения коэффициента усиления, величина которого ограничивается по текущей частоте вращения двигателя.
На выходе усиливающей функции 446 формируется усиленный сигнал рассогласования частоты вращения двигателя, передаваемый по линии 452 через пропорциональное звено, содержащее передаточную функцию 454, и интегрирующее звено, содержащее интегрирующую функцию 456, на суммирующий узел 458. Усиленный сигнал рассогласования частоты вращения двигателя пропускается через пропорциональное и интегральное звенья с целью выработки команды на изменение положения дроссельного механизма, которое должно устранить рассогласование частоты вращения двигателя. Из суммирующего узла 458 выходит сигнал настройки режима работы двигателя, передаваемый через ограничитель 463 на суммирующий узел 460. Кроме того, на суммирующий узел 460 подаются упреждающие сигналы настройки режима по загрузке двигателя, предназначенные для сохранения постоянной частоты вращения двигателя при его переменной загрузке. В приведенном примере имеются два типа сигналов, упреждающих изменение загрузки двигателя: первый сообщает об изменении общего шага несущего винта, а второй - об изменении циклического шага несущего винта.
Формирование упреждающих сигналов настройки режима по загрузке в ответ на входящие команды изменения общего шага несущего винта и частоты вращения двигателя осуществляется на основе дроссельной характеристики 465. Дроссельная характеристика 465 представляет собой совокупность кривых, каждая из которых соответствует определенной рабочей скорости и связывает между собой значения общего шага несущего винта (в процентном исчислении) с положениями дроссельного механизма. Дроссельная характеристика 465 позволяет определить примерное значение регулировки положения дроссельного механизма, соответствующее комбинации заданной частоты вращения двигателя и значения общего шага несущего винта. Для определения значений положения дроссельного механизма, соответствующих промежуточным комбинациям заданных рабочих скоростей двигателя и значений общего шага несущего винта, которые явным образом не показаны, характеристика использует метод линейной интерполяции. Использование дроссельной характеристики для выработки упреждающего сигнала заданных частоты вращения двигателя и величины общего шага позволяет системе автоматического регулирования быстро, с минимальным временем запаздывания, выводить двигатель на требуемый режим работы. Сигнал на выходе дроссельной характеристики 465 подается по линии 467 на суммирующий узел 460.
Другим сигналом, входящим в суммирующий узел 460, является упреждающий сигнал настройки режима по изменению циклического шага несущего винта. Установлено, что упреждающая команда положения дроссельного механизма при подаче команды на изменение циклического шага может быть смоделирована в виде примерно линейной функции, поэтому для преобразования команды изменения циклического шага, проходящей по линии 472 (с пульта дистанционного управления оператора), в упреждающий сигнал положения дроссельного механизма по загрузке двигателя (ее составляющей по циклическому шагу) применяется передаточная функция 470, после чего упреждающий сигнал проходит по линии 474 на суммирующий узел 460. В качестве исходных данных для формирования команды изменения циклического шага, передаваемой по линии 472, принимается суммарное изменение циклического шага в каналах тангажа и крена. Упреждающее воздействие на расход топлива в двигатель по изменению циклического шага, подавляет колебания частоты вращения двигателя, обусловленные изменением циклического шага лопастей несущего винта. Сигнал, выходящий из суммирующего узла 460, пропускается по линии 478 через ограничитель 480 выходного сигнала. Ограничитель выходного сигнала следит за тем, чтобы сигнал настройки режима работы двигателя не выводил значение расхода топлива за пределы области допустимых значений, например 0% - 100%.
Из ограничителя 480 выходит сигнал положения дроссельного механизма, стабилизирующий частоту вращения двигателя (конечный сигнал настройки режима работы двигателя), который по линии 485 поступает на исполнительное устройство 427 дроссельного механизма. В формировании конечного сигнала настройки режима работы двигателя основную роль играют упреждающие сигналы настройки режима по загрузке, заранее "настраивающие" двигатель на изменение нагрузки, и поэтому позволяющие системе автоматического регулирования частоты вращения двигателя динамично, при минимальных забросах параметров и запаздывании, набирать заданную рабочую скорость и поддерживать ее.
Преимущества регулирования с упреждающим воздействием по изменению общего и циклического шага заключаются в том, что команда исполнительному устройству дроссельного механизма на его перемещение в заданное положение подается немедленно после поступления входных управляющих сигналов. Хотя дроссельная характеристика 465 используется для обработки сигналов управления общим шагом несущего винта и оборотами двигателя, а сигнал управления циклическим шагом пропускается через усиливающую или передаточную функцию 470, специалистам должно быть понятно, что упреждающее регулирование должно быть связано с доминирующим фактором загрузки двигателя. В некоторых случаях доля циклического шага в общей загрузке двигателя может быть настолько мала, что ею можно пренебречь. Кроме того, несмотря на то, что кривые дроссельной характеристики показаны в виде экспонент, в конкретном случае профиль кривой будет определяться характером поведения двигателя при изменении его основной загрузки.
Коэффициент усиления рассогласования частоты вращения двигателя в описанном случае зависит только от изменения общего шага или заданного значения общего шага и далее ограничивается по частоте вращения двигателя. Однако специалистам должно быть понятно, что коэффициент усиления рассогласования частоты вращения двигателя может зависеть от полной загрузки двигателя или, как в рассматриваемом примере, основной или доминирующей составляющей части загрузки двигателя.
Хотя в описании в качестве объекта внедрения изобретения выбран беспилотный летательный аппарат с карбюраторным ротационным двигателем, специалистам понятно, что принцип регулирования рабочей скорости двигателя согласно настоящему изобретению применим к различным типам самодвижущихся аппаратов и их двигателей. Важным является то, что рабочая скорость двигателя находится в широком диапазоне значений и/или соотношение между мощностью на валу двигателя и расходом топлива изменяется по нелинейному закону.
Изобретение относится к системе автоматического регулирования частоты вращения двигателя, в частности к системе автоматического регулирования частоты вращения двигателя, быстро достигающей заданной частоты вращения и поддерживающей ее постоянно независимо от изменений загрузки двигателя, и позволяет повысить точность регулирования. Система (430) автоматического регулирования скорости работы двигателя позволяет двигателю (420) быстро набирать заданную рабочую скорость и поддерживать ее впоследствии постоянной независимо от изменений загрузки двигателя. Сигнал (444) рассогласования скорости работы двигателя вычисляется как разность заданной оператором скорости (440) работы двигателя и действительной скорости (434, 436) работы двигателя. Сигнал (444) рассогласования скорости работы двигателя умножается на коэффициент (448) усиления рассогласования скорости, после чего усиленный сигнал (452) рассогласования скорости подается через интегрирующее звено (456) и пропорциональное звено (454) на суммирующий узел (478), где он суммируется с упреждающими (474, 467) сигналами настройки режима по загрузке двигателя, в результате чего вырабатывается конечный сигнал (485) настройки режима. Упреждающие сигналы (474, 467) настройки режима по загрузке представляют собой сигналы прямой связи, заранее сигнализирующие двигателю об изменениях заданной загрузки, в результате сложения сигнала (452) настройки режима и упреждающих сигналов (474, 467) настройки режима по загрузке двигателя формируется команда (485) положения дроссельного механизма (конечный сигнал настройки режима), регулирующая расход топлива в двигатель (420) и тем самым регулирующая скорость его работы. Коэффициент (448) усиления рассогласования скорости работы двигателя определяется, исходя из загрузки (450) двигателя, после чего значение коэффициента (451) усиления рассогласования ограничивается по текущей скорости работы двигателя. 4 с. и 20 з.п. ф-лы., 4 ил.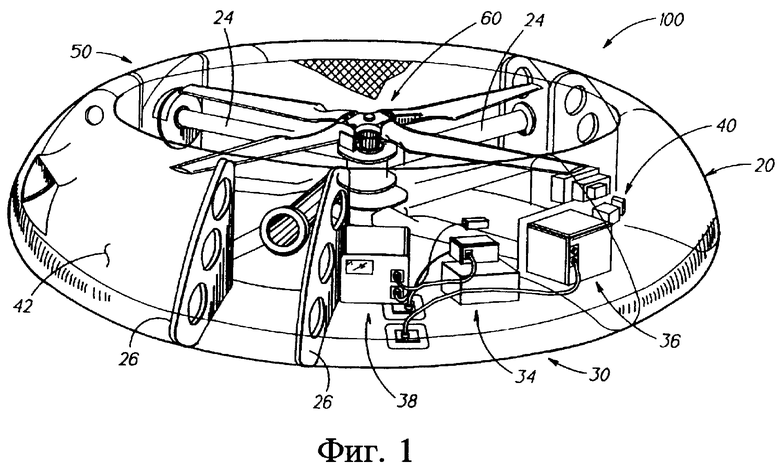
| 0 |
|
SU155748A1 | |
| Способ нарезания зубцов, двояковыпуклых в продольном направлении | 1939 |
|
SU57898A1 |
| Поршневой растворо- и бетононасос | 1953 |
|
SU96126A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ДЛИН ИЗВИЛИСТЫХ ЛИНИЙ | 1966 |
|
SU216291A1 |
| DE 3333392 A1, 22.03.84 | |||
| DE 3400951 A1, 18.07.85.DE 4103874 A1, 14.08.91 | |||
| DE 3937082 A1, 10.05.90 | |||
| Регулятор частоты вращения двигателя внутреннего сгорания | 1987 |
|
SU1574876A1 |
| Способ регулирования мощности двигателя внутреннего сгорания с внешним смесеобразованием и устройство для его осуществления | 1988 |
|
SU1677359A1 |
| Способ управления подачей топлива в двигатель внутреннего сгорания | 1986 |
|
SU1344929A1 |
| КОМПОЗИЦИЯ НА ОСНОВЕ НАТУРАЛЬНОГО ГОРЮЧЕГО СЛАНЦА ДЛЯ ПРОИЗВОДСТВА ЭБОНИТОВЫХ ИЗДЕЛИЙ | 1998 |
|
RU2173323C2 |
| УСТРОЙСТВО ОХЛАЖДЕНИЯ ГАЗА РВГ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОХЛАЖДЕНИЯ ГАЗА РВГ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2574122C1 |
