Область изобретения
Изобретение относится к области гашения многомодовых электромагнитных колебаний в системах электроснабжения, связывающих множество генераторов и потребителей.
Предпосылки изобретения
В результате продолжающегося неурегулирования рынков электроэнергии общепринятой практикой стало распределение нагрузки и транзитная передача мощности от удаленных генераторов локальным потребителям. Вследствие конкуренции между энергетическими компаниями и растущей потребности в оптимизации активов увеличиваются объемы электроэнергии, передаваемые в существующих сетях, что неизменно вызывает перегрузку сетей, «узкие» места при передаче и/или колебания элементов систем передачи электроэнергии. В этом смысле электросети являются очень динамичными. В целом, электромагнитные колебания в системах энергоснабжения, включающих несколько генераторов переменного тока, имеют частоту менее нескольких Гц и считаются допустимыми, если они затухают. Они вызываются нормальными малыми изменениями в нагрузке системы и являются характерными для любой энергосистемы.
Однако при изменении эксплуатационного режима энергосистемы, например, в случае нового распределения потоков энергии, вызывающих соединение или разъединение генераторов, нагрузок и/или линий передачи, могут возникать недостаточно демпфированные колебания. Аналогично, объединение нескольких существующих энергораспределительных сетей может способствовать появлению недостаточно демпфированных колебаний даже в том случае, когда в каждой из них отдельно не существует плохо демпфированных колебаний до их объединения. В таких случаях повышение мощности передачи, достигающее нескольких МВт, может различным образом воздействовать на устойчивые колебания и неустойчивые колебания, которые потенциально могут привести к краху системы или вызвать нарушение синхронности, разрыву соединений и, в конце концов, невозможности передачи электроэнергии потребителю. Надлежащее автоматическое наблюдение за работой энергосистем может повышать точность оценки оператором сети состояний энергосистемы и предотвращать полное отключение за счет принятия необходимых мер, таких как подключение специально разработанного оборудования для демпфирования колебаний.
Системы и сети передачи и распределения электроэнергии включают высоковольтные межсистемные линии связи для подключения географически разделенных регионов, линии высокого напряжения и трансформаторные подстанции для преобразования напряжения и для переключения соединений между линиями. Из уровня техники известно, что для управления сетью применяют приборы для измерения фазоров электрических величин (PMU). PMU предоставляют локальную информацию о сети с временными отметками, в частности, о токах, напряжениях и потоках нагрузок. Множество векторных измерений, собираемых в сети с помощью PMU и обрабатываемых на центральном процессоре данных, предоставляют моментальный снимок общего электрического состояния энергосистемы.
В патентной заявке ЕР-А 1737098 описано управление объединенным потоком напряжения или энергии и демпфирование одномодовых электромагнитных колебаний в электроэнергосистемах с помощью приборов гибкой системы передачи электроэнергии переменным током (FACTS). Для этой цели информация о состоянии или эксплуатационном режиме энергосистемы генерируются из пригодного для этого сигнала дополнительной системы, и на ее основе выводится управляющий параметр для регулятора FACTS. Управляющий параметр и сигналы основной системы используют для вычисления управляющей команды, определяющей настройки прибора FACTS. Вслед за изменением состояния энергосистемы, таким как изменение топологии сети передачи, с помощью соответствующей перенастройки управляющего параметра демпфирующего или стабилизирующего оборудования можно избежать плохо демпфированных или даже неустойчивых колебаний.
Типовые приборы технологии гибких систем электропередач переменным током FACTS объединяют компоненты мощных полупроводниковых приборов и включают, например, статические регулируемые компенсаторы (SVC), объединенный регулятор потока мощности (UPFC), последовательные конденсаторы с тиристорным управлением (TSCS), фазорегулирующие трансформаторы с тиристорным управлением (TCPST), импедансные модуляторы, последовательные компенсирующие конденсаторы.
Такие известные технологии позволяют управлять демпфированием выбранного одномодового колебания на основе одного сигнала обратной связи. Это решение известно как «один вход, один выход» (SISO). Было выяснено, что электромеханические колебания в электроэнергосетях также принимают форму суперпозиции нескольких мод колебаний. Несколько мод колебаний вызывают сходные проблемы с наблюдаемыми при одномодовых колебаниях и, таким образом, могут потенциально приводить к краху электроэнергосистемы. Кроме того, в ситуациях, когда для стабилизации отдельной выбранной моды колебаний применяется регулятор демпфирования колебаний мощности (POD), это часто может вызвать дестабилизацию других имеющихся мод колебаний, например вторичной преобладающей моды колебаний, которые вследствие этого демпфируются в меньшей степени, чем первичная преобладающая мода колебаний. Таким образом, можно видеть, что работа регулятора SISO POD, настроенного для усиления демпфирования первичной преобладающей моды, оказывает негативное влияние на вторичную преобладающую моду (и любые другие моды).
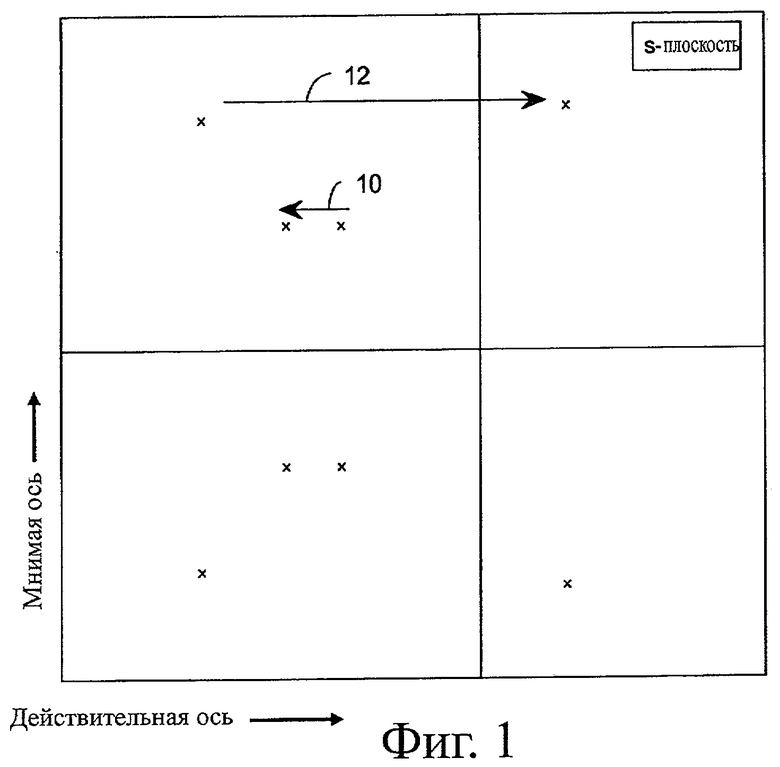
Со ссылкой на известные технологии, позволяющие управлять демпфированием одномодовых колебаний, на фиг.1 показан график комплексной частотной области воздействия известного регулятора SISO POD с применением локальной обратной связи. В таком графике комплексной частотной области (в s-плоскости) ось х обозначает действительную часть s (которая является абсолютным модальным демпфированием), а ось y обозначает мнимую часть s (которая является модальной частотой, выраженной в радианах в секунду), где преобразования s-плоскости общеизвестны как преобразования Лапласа, следовательно, в s-плоскости умножение на s равнозначно дифференцированию в соответствующей области реального времени, а деление на s равнозначно интегрированию. Каждая точка на s-плоскости представляет собой собственное значение или полюс функции преобразования. Стрелка 10 рядом с осью х показывает увеличение демпфирования первой преобладающей моды колебаний, так как изменение собственного значения направлено в сторону левой половины комплексной плоскости. Параллельная стрелка 12 далее от оси х показывает ухудшение демпфирования второй преобладающей моды колебаний (усиление колебаний во временной области), что отражается изменением собственного значения в сторону правой части комплексной плоскости.
В рамках настоящего описания раскрывается Статья Садиковича Р. и др. «Применение приборов FACTS для демпфирования колебаний энергосистемы» из трудов конференции Power Tech, проходившей 27-30 июня 2005 в Санкт-Петербурге (Россия), с целью ссылки на нее. В статье рассматривается вопрос выбора подходящих сигналов обратной связи и последующей адаптивной настройки параметров регулятора POD в случае изменения эксплуатационного режима. Рассмотрение базируется на линейной модели системы, функция преобразования которой G(s) раскрывается как сумма N вычетов:
N собственных значений λi соответствует N модам колебаний системы, где вычет Ri отдельной моды дает чувствительность собственного значения этой моды к обратной связи между выходом и входом системы.
Раскрытие изобретения
Таким образом, целью изобретения является демпфирование множества электромагнитных колебаний в сетях передачи электроэнергии гибким способом и с минимальным дополнительным оборудованием. Эти задачи достигаются с помощью способа и регулятора для демпфирования множества электромагнитных колебаний в энергосистеме по пп.1 и 5. Предпочтительные дополнительные варианты исполнения очевидны из зависимых пунктов формулы изобретения. В соответствии с первым аспектом изобретения предлагается способ демпфирования множества электромагнитных колебаний в энергосистеме. Способ включает получение сигналов данных фазоров из, по меньшей мере, одного местоположения энергосистемы, анализ каждой моды колебаний, выделение каждой моды колебаний из упомянутого сигнала, демпфирование каждой моды колебаний на основе анализа и подачу управляющего сигнала, полученного из демпфируемой моды колебаний, на устройство управления потоком мощности в энергосистеме. Данный способ характеризуется тем, что этап выделения моды колебания включает также выбор моды и максимизацию модального вычета.
Предпочтительно способ также включает суперпозицию двух или более ослабленных колебательных мод для получения сигнала суперпозиции и подачу сигнала управления, выведенного на основе сигнала суперпозиции, в устройство управления потоком мощности в энергосистеме. Таким образом, способ можно с преимуществом применять для демпфирования одной моды колебаний или множества мод колебаний.
Предпочтительно этап выбора моды также включает получение модальной управляемости и модальной наблюдаемости. Кроме того, каждый модальный вычет представляет собой произведение модальной управляемости и модальной наблюдаемости.
В соответствии со вторым аспектом изобретения для демпфирования множественных электромагнитных колебаний в энергосистеме предусматривается регулятор. Регулятор содержит, по меньшей мере, одно устройство измерения фазоров электрических величин, получающее сигналы данных фазоров, включающие сигналы колебательных мод, по меньшей мере, один регулятор гасителя колебаний мощности для приема и ослабления каждого сигнала колебательной моды, средств суперпозиции для приема и суммирования ослабленных сигналов и вычисления сигнала управления и регулятор обратной связи для подачи сигнала управления на устройство управления потоком мощности в энергосистеме. Регулятор характеризуется тем, что содержит средство выбора моды и средство максимизации вычета для выделения каждой моды колебаний в сигналах данных фазоров.
Энергосистемы являются крупномасштабными системами с большим количеством динамических состояний, мод колебаний и измеримых входов и выходов. Поэтому возможно получение множества сигналов, которые можно выбирать в качестве сигнала обратной связи. Настоящее изобретение обеспечивает надлежащий выбор сигнала обратной связи и процедуру разработки регулятора с тем, чтобы обеспечить эффективное демпфирование, по меньшей мере, одной моды колебаний. Необходимо отметить, что в настоящем описании регулятор из настоящего изобретения может также называться компенсатором.
Предпочтительно, по меньшей мере, один регулятор гасителя колебаний мощности может быть регулятором гасителя колебаний мощности MIMO, SISO, SIMO или MISO.
Предпочтительно, регулятор работает на платформе глобального контроля и управления.
В предпочтительном варианте исполнения, описанном далее, регулятор работает на устройстве измерения фазоров электрических величин.
В еще одном предпочтительном варианте исполнения регулятор работает на устройстве управления потоком мощности.
Регулятор из настоящего изобретения может применяться как программное обеспечение, работающее на цифровом компьютере, или как аппаратная реализация с применением таких технологий, как EPROM и т.д. Преимущество настоящего изобретения заключается в том, что оно сравнительно не сложно, при этом эффективно решает задачу демпфирования множества электромагнитных колебаний в сетях передачи электроэнергии.
Краткое описание чертежей
Предмет изобретения подробно описан далее со ссылками на предпочтительные примеры осуществления, иллюстрируемые с помощью прилагаемых чертежей, где:
фиг.1 графически иллюстрирует влияние известного регулятора SISO POD в области комплексной частоты с применением сигналов локальной обратной связи для управления в соответствии с известным уровнем техники;
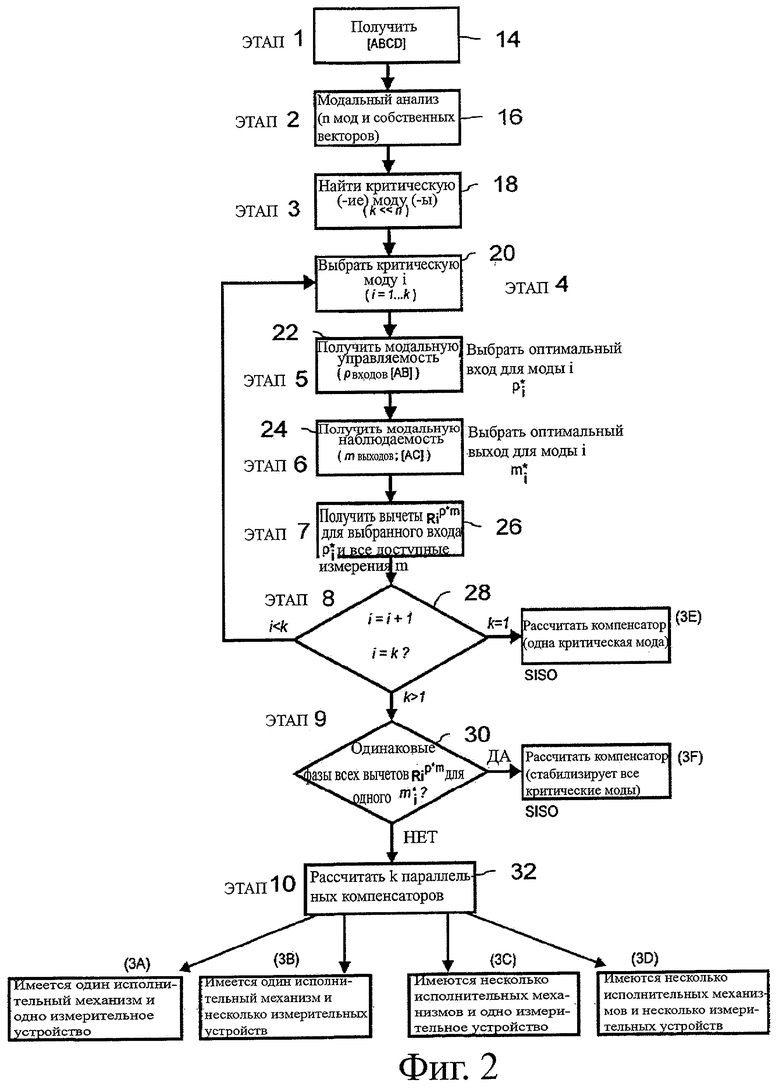
на фиг.2 изображена блок-схема способа разработки регулятора согласно настоящему изобретению;
на фиг.3А-3Е схематически показаны различные варианты исполнения регулятора согласно настоящему изобретению;
на фиг.4 изображена диаграмма Найквиста оптимального управляющего решения, базирующегося на всех имеющихся сигналах;
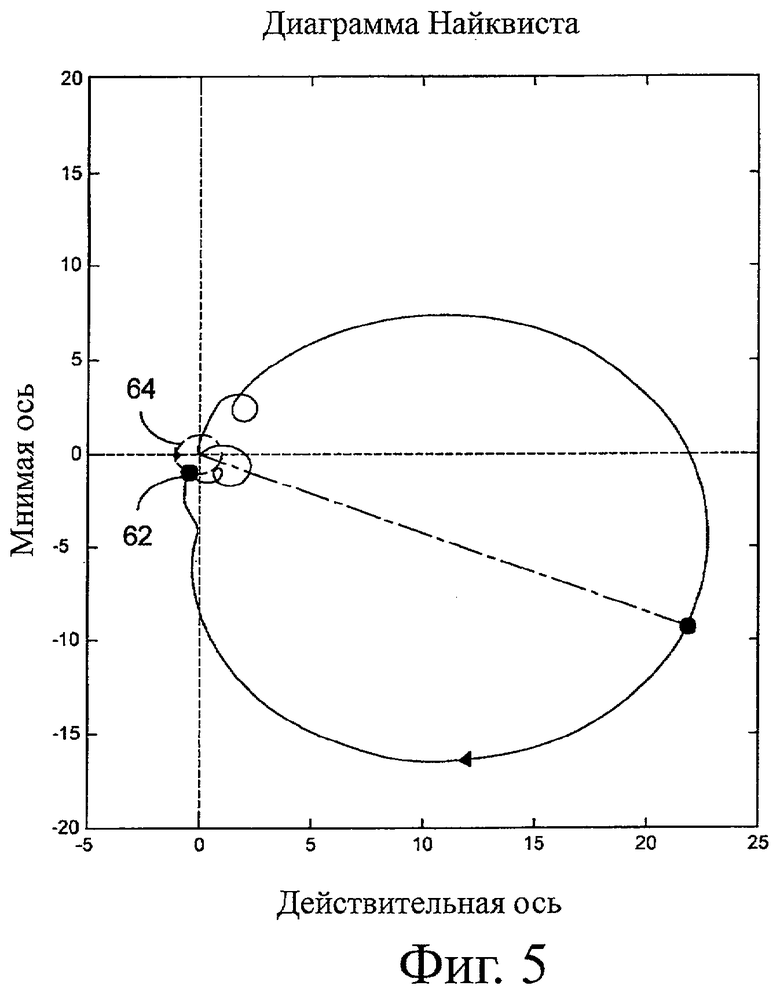
на фиг.5 изображена диаграмма Найквиста оптимального управляющего решения, базирующегося только на локальных сигналах;
на фиг.6 графически изображено влияние регулятора MIMO POD в области комплексной частоты с применением тщательно отобранных удаленных сигналов обратной связи PMU для осуществления управления в соответствии с настоящим изобретением;
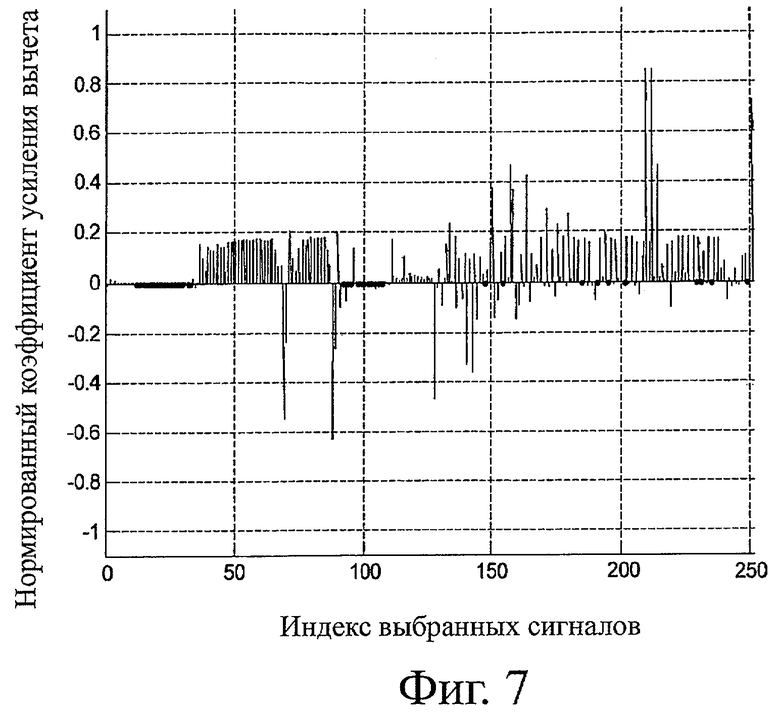
на фиг.7 показана схема коэффициентов усиления вычетов, соответствующих имеющимся сигналам, включая удаленные сигналы, в энергосистеме.
Используемые на чертежах ссылочные обозначения и их значения перечислены в сводном перечне ссылочных обозначений. Как правило, одинаковые элементы на фигурах имеют одни и те же ссылочные обозначения.
Подробное описание предпочтительных вариантов исполнения
На фиг.2 показана блок-схема этапов способа для обеспечения одновременного демпфирования множества мод колебаний в энергосистеме. Для полноты включен следующий вывод алгоритма настоящего изобретения. На первом этапе 14 математическую модель энергосистемы
линеаризуют относительно представляющего интерес узла х=x0 и таким образом получают
(для удобства и без потери общности полученных результатов далее в уравнениях сквозную матрицу D можно считать нулевой матрицей).
На втором этапе 16 с помощью модального анализа модель преобразуют в модальные координаты, получая n собственных значений λk и соответствующие левый lk и правый rk собственные векторы (k=1, …, n), выполняющие (3) и (4).
Следует заметить, что если матрица А пространства состояний имеет n отличных собственных значений, A, R, L являются соответственно диагональной матрицей собственных значений и матрицами правого и левого собственных векторов.
Вводится следующее схожее преобразование (5) и (2) переписывается как (6)

Выбирая матрицу Т преобразования равной R (матрице правых собственных векторов А), т.е. Δx=Rz из (6) получаем (7).

На третьем этапе 18 на фиг.2 находят критические моды. Затем на этапе 20 выбирается критическая мода i. Набор всех комплексных собственных значений λk характеризует колебания. Для оценки ослабления колебаний в большей мере Удобной, чем абсолютное демпфирование αk, является относительное ослабление ξk, получаемое из уравнения (8), дающего нормированные значения в процентах  .
.
Работающая энергосистема устойчива, что означает в показателях относительного ослабления (8), что выполняется условие (9), полезно сортировать все ξk (со всеми соответствующими собственными значениями и собственными векторами Λ, R и L). Обозначаем минимум как ξ1 и называем его (с соответствующей частотой ωk) преобладающей модой.

Другие представляющие интерес моды представляют собой моды, имеющие наименьший коэффициент (соответствующий слабому ослаблению). Как показано на пятом 22 и шестом 24 этапах блок-схемы, необходимо обеспечить модальную управляемость и наблюдаемость и выбрать оптимальный вход и выход для моды I соответственно.
Необходимо отметить, что в комплексном анализе «вычетом» называется комплексное число, описывающее поведение линейных интегралов мероморфной функции около сингулярности. Вычеты можно использовать для вычисления интегралов по более сложной траектории с помощью теоремы о вычетах. Каждый вычет представляет произведение модальной наблюдаемости и управляемости.
Для конкретной или любой выбранной представляющей интерес моды λk вычисляется 26 следующий набор вычетов; т.е. матрица RES размерности m×r с учетом всех возможных входов и выходов следующим образом:

Ссылаясь на восьмой этап 28 блок-схемы, можно видеть, что неполный регулятор SISO (для единственной моды) рассчитывают следующим образом.
Для представляющей интерес моды, например, λI выбирают вход i и выход j так, что отдельный комплексный вычет resij(λ1) имеет максимальную норму среди всех m×r RES(λ1):

В статье Садиковича Р. и др. «Применение приборов FACTS для ослабления колебаний энергосистемы» из трудов конференции Power Tech, проходившей 27-30 июня 2005 в Санкт-Петербурге (Россия), как упоминалось выше, показано, как рассчитать контролер SISO на основании известной чувствительности собственного значения λk, заданной (12) при условии закрытия контрольной петли между выбранным входом i и выходом j с помощью регулятора H(s).

Выберем другую представляющую интерес моду, λ2, λ3, … и т.д. Как показано на фиг.2, возможно вернуться к четвертому этапу для повтора этапов с четвертого по восьмой для следующей представляющей интерес моды. Ссылаясь на девятый этап 30, получают одни и те же фазы всех вычетов для одной моды, и это приводит к расчету следующего регулятора SISO, способного стабилизировать все критические моды.
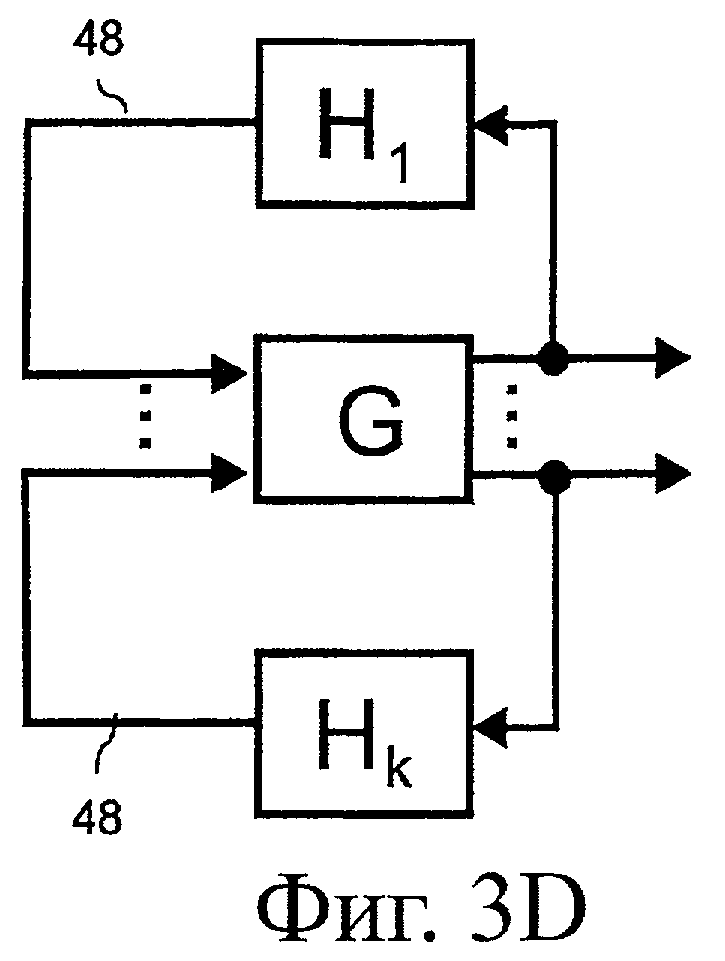
Ссылаясь на десятый этап 32 на фиг.2, k параллельных компенсаторов рассчитаны для k мод с оптимальной наблюдаемостью преобладающей моды. Различные компенсаторы, которые могут быть рассчитаны, описаны в элементах блок-схемы, обозначенных 3A-3F на фиг.2. Исполнительные механизмы 3С, 3D и 3F являются регуляторами MIMO и их выход является суперпозицией вкладов неполных регуляторов SISO.
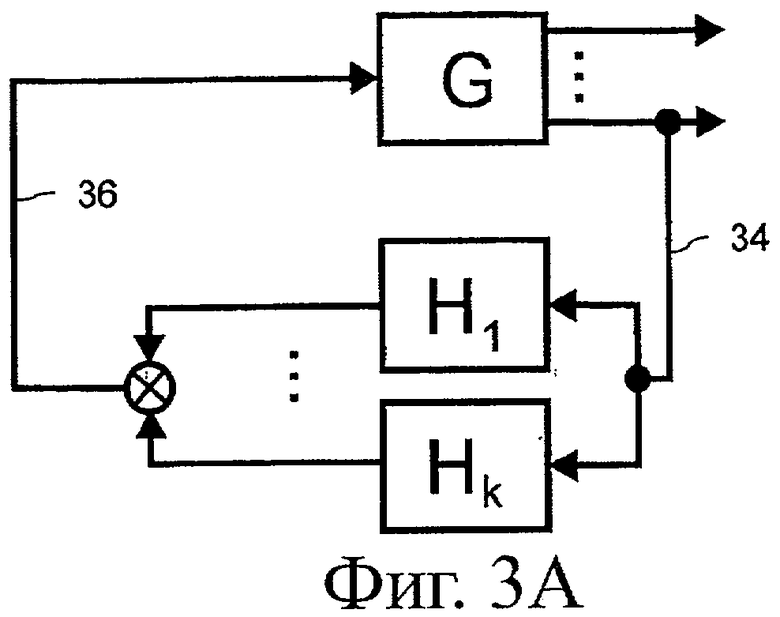
Если применяется регулятор H(s) обратной связи, то собственное значение λi исходной системы G(s) сдвигается, причем этот вызванный регулятором сдвиг пропорционален вычету Ri. Исходя из требуемого положения λi des, сдвинутого собственного значения таким образом можно рассчитать коэффициент К усиления регулятора, обратно пропорциональный вычету Ri. В условных обозначениях на фиг.3А-3Е регулятор Н с обратной связью и энергосистема G соединены с помощью измеряемого(ых) сигнала(ов) PMU (обозначенных как стрелки, направленные от G к Н) и исполнительного(ых) элемента(ов) соответственно (обозначенных как стрелки, направленные от Н к G).
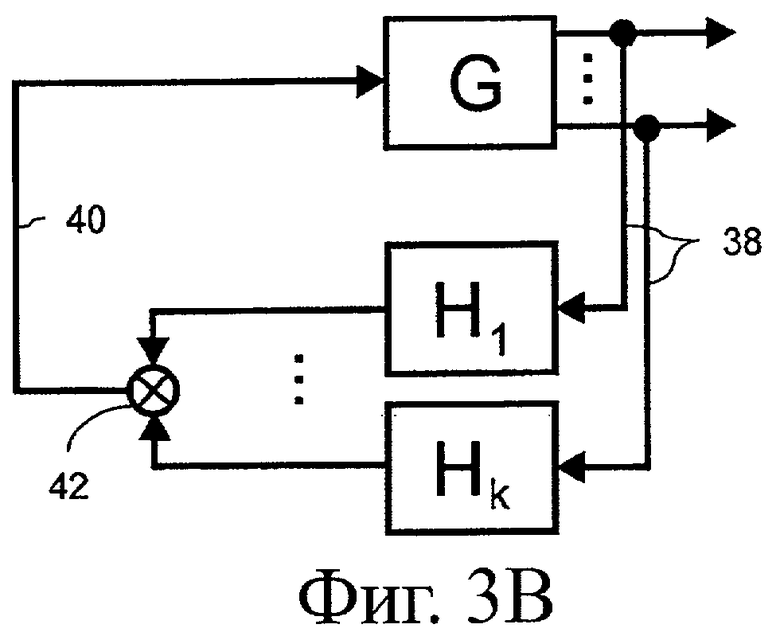
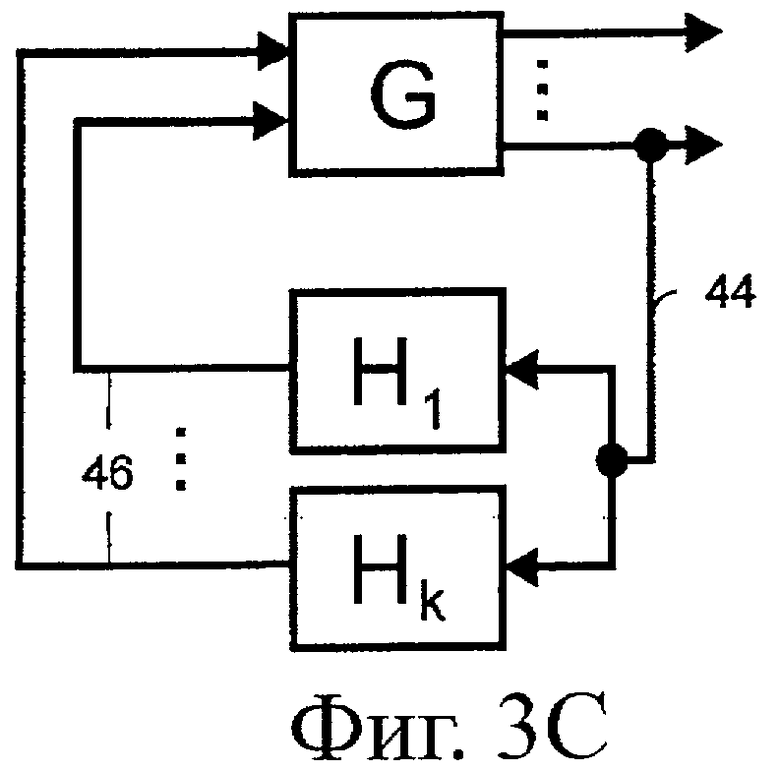
На фиг.3А-3Е схематически показаны различные варианты исполнения регулятора согласно настоящему изобретению. Число критических мод колебаний, которые необходимо стабилизировать, обозначено как k.
На фиг.3А изображен регулятор SISO, включающий PMU, с единственным входом 34, и обеспечивающий единственный выход 36 для исполнительного элемента. Такое устройство может стабилизировать все критические моды с применением единственного PMU и единственного исполнительного элемента.
На фиг.3В изображен регулятор MISO (несколько входов, один выход), включающий два или более неполных регулятора, параллельно получающих вход 38 от нескольких различных PMU и обеспечивающих один выход 40 для одного исполнительного элемента. Каждый PMU через соответствующий регулятор обеспечивает один вход в суммирующее устройство 42. Один выход суммирующего устройства является входом в исполнительный элемент. Такая компоновка ослабляет k мод и может применяться в случаях, когда имеется несколько различных измерений PMU. В противоположность этому компоновка на фиг.3А может применяться в случаях, когда предполагается, что будет установлено только единственное PMU.
На фиг.3С показан регулятор SIMO (один вход, несколько выходов), включающий одно PMU, подающее входной сигнал 44 на k параллельных регуляторов, рассчитанных для ослабления k критических мод с применением k исполнительных элементов. PMU обеспечивает единственный вход, который имеет обратную связь через k регуляторов и k исполнительных элементов 46 для энергосистемы. Такая компоновка стабилизирует k критических мод.
На фиг.3D показан регулятор MIMO (несколько входов, несколько выходов), включающий два или более PMU, регуляторы и исполнительные элементы; в каждом неполном контуре 48 управления применяются измерения PMU и исполнительный элемент. В данном варианте исполнения регулятора не требуется суммирования или суперпозиции устройств. Такая компоновка ослабляет k колебательных мод.
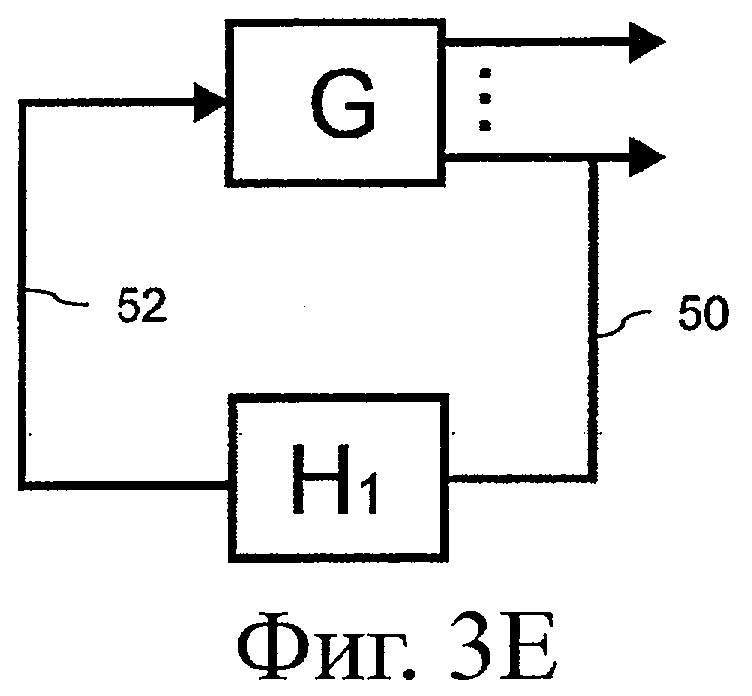
На фиг.3Е показан регулятор SISO, включающий одно PMU 50, один регулятор и один исполнительный элемент 52. PMU предоставляет одно измерение, которое передается по каналу обратной связи на исполнительный элемент с помощью одного регулятора. Такая компоновка предназначена специально для стабилизации одной критической моды.
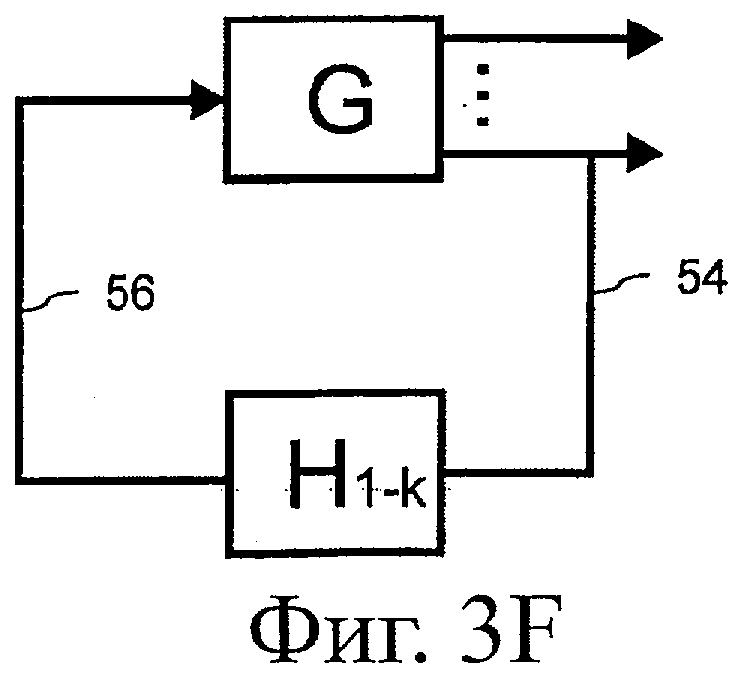
На фиг.3F изображен регулятор SISO, включающий одно PMU 54, один регулятор и один исполнительный элемент 56. PMU обеспечивает одно измерение, которое передается по каналу обратной связи на исполнительный элемент с помощью одного регулятора. Такая компоновка предназначена для стабилизации k критических мод с применением простой схемы SISO. Это возможно в случаях, когда все соответствующие углы вычетов одинаковы.
На практике каждый из описанных выше вариантов исполнения динамического компенсатора MIMO POD согласно настоящему изобретению выполняется следующим образом:
- получение данных фазоров от энергосистемы на удаленных PMU и ввод сигналов исходного нарушенного потока мощности с множественными колебаниями в регуляторы MIMO, SISO, SIMO, MISO POD,
- выделение каждой отдельной моды колебаний из сигнала с помощью выбора моды и максимизации вычета для каждой моды. Последующий ввод каждой моды в отдельный регулятор SISO POD,
- анализ размера и типа колебания в регуляторе SISO POD,
- ослабление отдельной моды колебаний с помощью POD и вывод сигнала от регулятора SISO POD,
- передача сигналов от каждого параллельного регулятора SISO POD на устройство суммирования или любые другие устройства суперпозиции сигналов (использующие взвешенную сумму и т.д.),
- передача элемента окончательного ослабляющего сигнала на исполнительные элементы. Получение данных фазоров от энергосистемы на удаленных PMU и результирующего сигнала для ослабления нескольких мод колебаний.
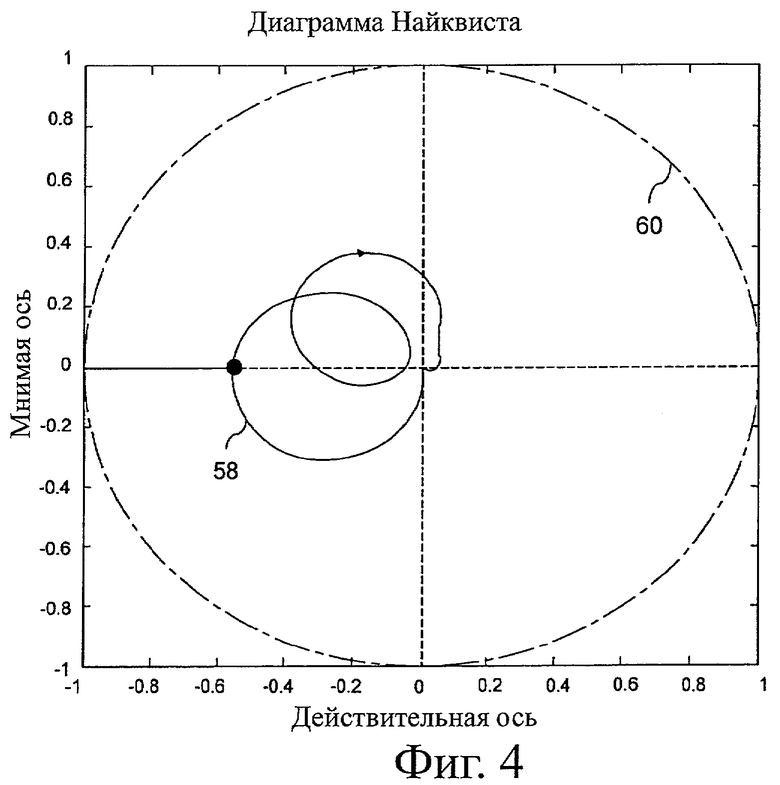
Диаграмма Найквиста применяется в автоматическом управлении и обработке сигналов для оценки устойчивости системы с обратной связью. Это представлено графиком, где отображены коэффициент усиления и фаза частотного отклика. Диаграмма таких векторных величин показывает фазу и размерность как расстояние и угол от начала координат. Критерий устойчивости Найквиста дает возможность выполнить простую проверку на устойчивость системы управления с замкнутым контуром на основе анализа диаграммы Найквиста системы с незамкнутым контуром управления (т.е. той же системы, включающей рассчитанный регулятор, но без замыкания контура обратной связи).
На фиг.4 показана диаграмма Найквиста для оптимального управляющего решения на основе имеющихся сигналов. Следует отметить, что удаленные сигналы также включены в выборку наилучших сигналов обратной связи. Черная точка (-1,0) 58 обозначает устойчивость. Маршрут графика образует две явные петли, не охватывающие точку устойчивости (-1,0), кроме того, график полностью остается в окружности 60 единичного радиуса (штрихпунктирная линия) для всех частот. Следовательно, такая система управления будет иметь бесконечный предел стабильности фазы задержки (на рисунке не имеет пересечения с единичной окружностью) и очень большой предел устойчивости усиления (показан с помощью относительно большого расстояния между ее пересечением с отрицательной осью х, т.е. с помощью черной точки и точки (-1,0)).
На фиг.5 изображена диаграмма Найквиста для наилучшего управляющего решения на основе только локальных сигналов. Черная точка 62 рядом с действительной осью представляет собой пересечение с единичной окружностью. Маршрут графика образует явную петлю, которая показывает, что система управления будет устойчива. Штрихпунктирная линия 64 около нуля обозначает единичную окружность. Такая диаграмма Найквиста показывает, что пределы устойчивости значительно меньше, чем для управляющего решения, показанного на фиг.4, где применяются удаленные сигналы. Следовательно, даже несмотря на то, что можно достичь одинаковой производительности в обоих случаях, локальное решение является менее устойчивым.
На фиг.6 изображен график области комплексных частот регулятора MIMO POD с применением обратной связи удаленных PMU в соответствии с настоящим изобретением, таким образом демонстрирующий, что ослабление колебаний мощности можно значительно улучшить за счет надлежащего выбора сигналов обратной связи, применяемых для управления обратной связью. В частности, регулятор POD из настоящего изобретения можно считать предназначенным для стабилизации не только первой преобладающей моды 66, как показано на фиг.1, но также и второй преобладающей моды 68. Таким образом, за счет тщательного подбора сигнала обратной связи и соответствующей процедуры расчета регулятора можно ослабить несколько преобладающих мод колебаний одновременно.
Нормированные коэффициенты 250 усиления вычетов выбранных сигналов показаны на фиг.7. На графике ось х обозначает индекс выбранного сигнала (1-250), а ось у обозначает нормированный коэффициент усиления вычета. Такой график вычетов вместе с диаграммами Найквиста на фиг.4 и 5 показывает, что чем выше коэффициент усиления комплексного вычета, тем меньший коэффициент усиления требуется от регулятора (представленного меньшей петлей в диаграмме Найквиста) для обеспечения такого же сдвига полюса влево (т.е. улучшения ослабления). Таким образом, можно видеть, что управляющие решения с использованием сигналов с высокими коэффициентами усиления вычетов являются наиболее устойчивыми. Например, два наибольших графика вычетов, имеющих 0,84 единиц вычетов сигнала с индексом 210 (удаленный сигнал PMU), показывает, что такой сигнал более подходит для управления обратной связью, чем сигнал с индексом 10 (локальный сигнал). Следовательно, правильный выбор сигнала обратной связи для управления можно рассматривать как первый этап в процедуре расчета регулятора. Наличие нескольких удаленных сигналов, дополняющих имеющиеся локальные сигналы, соответственно расширяет возможности, которые осуществляющий управление инженер имеет для выбора сигналов обратной связи.
В предпочтительном варианте исполнения регулятор MIMO из настоящего изобретения может работать на платформе для глобального мониторинга и управления. В другом предпочтительном варианте исполнения регулятор MIMO из настоящего изобретения может работать на PMU.
В еще одном предпочтительном варианте исполнения регулятор MIMO из настоящего изобретения может работать на устройстве FACTS, в частности на низкоуровневой платформе управления силовой электроники для устройств FACTS.
Для специалиста очевидно, что регулятор MIMO согласно настоящему изобретению может быть выполнен как аппаратное решение или как компьютерная программа.
Еще один вариант исполнения настоящего изобретения включает регулятор MIMO, имеющий только одно устройство FACTS. Ссылаясь на вышесказанное, из этого следует, что m=1, следовательно, RES(λk) является вектором-столбцом. Это означает, что данный производный вариант имеет меньше степеней свободы по сравнению со случаем, когда m>1.
В следующем варианте исполнения предусмотрено, что возможно применение нескольких устройств FACTS для обеспечения ослабления одной моды или одного сигнала ввода/обратной связи для нескольких устройств FACTS для ослабления нескольких мод. Все такие комбинации отражены в рассматриваемой форме и размерностях трехмерной матрицы RES(λk); три индекса i, j, k ограничены в процедуре поиска во время этапа (4А) предыдущего производного варианта.
В альтернативном варианте исполнения специалист сможет оценить возможность использования другого расчетного алгоритма для расчета нижележащего уровня регулятора SISO по сравнению с тем, на который дается ссылка на одиннадцатом этап блок-схемы на фиг.5. Также настоящее изобретение можно модифицировать с тем, чтобы обеспечить компоновку SISO, или SIMO, или MISO дополнительно к описанному выше варианту MIMO.
В альтернативном варианте исполнения, устройство FACTS из настоящего изобретения можно заменить на быстродействующее устройство, такое как AVR или модулятор прямой нагрузки.
Альтернативой операции суперпозиции, описанной выше, может быть минимальная сумма, максимальная сумма или взвешенная сумма и т.д.
Ссылаясь на блок-схему на фиг.2, специалистам хорошо известно, что неполный регулятор SISO (для одиночной моды) можно спроектировать с помощью альтернативного подхода по сравнению с описанным выше. Например, вместо опережающе-запаздывающего подхода можно применить так называемый векторный POD подход. Разумеется, принципиальный результат не меняется.
Однако специалисту будет ясно, что настоящее изобретение не является простой комбинацией нескольких систем одномодового демпфирования. В частности, регулятор FACTS из настоящего изобретения не требует регулятора установившегося режима. Если произвольно выбранные демпфирующие устройства SISO были бы соединены параллельно и их выходы суммировались бы без процедуры оптимизации/выбора сигнала, как показано на фиг.2, то демпфирующее устройство MIMO из настоящего изобретения не было бы получено, так как каждое устройство SISO не имело бы оптимальной наблюдаемости преобладающей моды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ШУМОВ В ПАССАЖИРСКОМ САЛОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2504025C2 |
| Способ и устройство для выполнения синхронизированных векторных измерений | 2019 |
|
RU2788340C2 |
| СПОСОБ СИНХРОФАЗОРНОГО ИЗМЕРЕНИЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В УСТРОЙСТВЕ ИЗМЕРЕНИЯ ФАЗОРОВ (PMU) Р-КЛАССА | 2014 |
|
RU2615216C2 |
| ФАЗОВАЯ КОРРЕКЦИЯ ДЛЯ OFDM И MIMO ПЕРЕДАЧ | 2007 |
|
RU2433552C2 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВСТАВКОЙ ПОСТОЯННОГО ТОКА | 2014 |
|
RU2539357C1 |
| ИЕРАРХИЧЕСКОЕ КОДИРОВАНИЕ С ИСПОЛЬЗОВАНИЕМ МНОЖЕСТВА АНТЕНН В СИСТЕМЕ РАДИОСВЯЗИ | 2004 |
|
RU2316900C1 |
| СПОСОБ БЫСТРОДЕЙСТВУЮЩЕГО УПРАВЛЕНИЯ ПЕРЕТОКОМ АКТИВНОЙ МОЩНОСТИ | 2011 |
|
RU2449446C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ВОЗБУЖДЕНИЯ УПРАВЛЯЕМОГО РЕАКТОРА | 1972 |
|
SU359732A1 |
| ОЦЕНКА ПАРАМЕТРОВ ТЕПЛОВОЙ МОДЕЛИ ЛИНИИ ЭЛЕКТРОПИТАНИЯ | 2007 |
|
RU2430457C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПОДАВЛЕНИЯ РЕЗОНАНСА | 2009 |
|
RU2508589C2 |
Использование: в области электротехники. Технический результат - обеспечение демпфирования электромагнитных колебаний в сетях передачи электроэнергии гибким способом и с минимальным дополнительным оборудованием. Регулятор для демпфирования множественных электромагнитных колебаний в энергосистеме (G) содержит, по меньшей мере, одно устройство (PMU) измерения фазоров электрических величин, получающее сигналы данных фазоров, включающие сигналы моды колебаний, по меньшей мере, один регулятор гасителя (POD) колебаний мощности для приема и ослабления сигнала каждой моды колебаний, устройство суперпозиции для приема и суммирования ослабленных сигналов и получения управляющего сигнала, регулятор (Н) обратной связи для возврата управляющего сигнала на устройство управления потоком мощности в энергосистеме (G), а также средство для выделения каждой моды колебаний в сигналах данных фазоров, причем это средство содержит средство выбора моды и средство для определения вычета, имеющего максимальную норму в матрице вычетов выделенной моды. 3 н. и 7 з.п. ф-лы, 12 ил.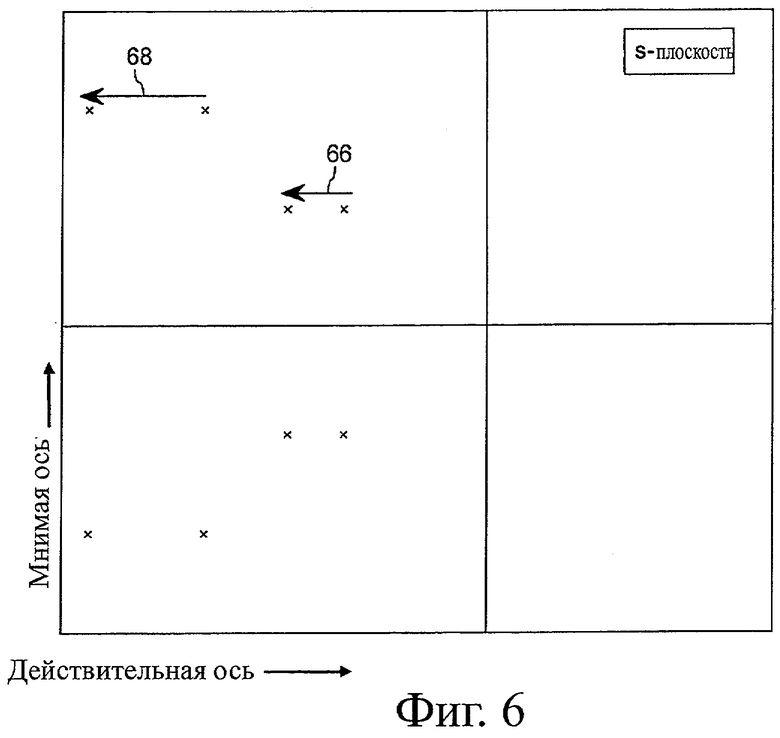
1. Способ демпфирования множественных электромагнитных колебаний в энергосистеме, включающий: получение сигналов данных фазоров из по меньшей мере одного местоположения энергосистемы, анализ (16) каждой моды колебаний с помощью модального анализа, выделение (20) каждой моды колебаний из упомянутых сигналов, демпфирование каждой моды колебаний на основе анализа, применение управляющего сигнала, полученного из ослабленной моды колебаний, к устройству управления потоком мощности в энергосистеме, отличающийся тем, что этап выделения моды колебаний включает выбор моды и определение вычета, имеющего максимальную норму в матрице вычетов выделенной моды (26).
2. Способ по п.1, в котором дополнительно осуществляют суперпозицию двух или более ослабленных мод колебаний для получения сигнала суперпозиции, и подают сигнал управления, полученный из сигнала суперпозиции, на устройство управления потоком мощности в энергосистеме.
3. Способ по п.1 или 2, в котором этап выбора моды включает получение модальной управляемости (22) и модальной наблюдаемости (24).
4. Способ по п.1, в котором вычет каждой моды представляет собой произведение модальной управляемости и модальной наблюдаемости.
5. Регулятор для демпфирования множественных электромагнитных колебаний в энергосистеме (G), содержащий: по меньшей мере, один регулятор гасителя (POD) колебаний мощности для приема и ослабления приема и ослабления сигнала каждой моды колебаний в сигналах данных фазоров, получаемых по меньшей мере одним устройством (PMU) измерения фазоров электрических величин, устройство суперпозиции для приема и суммирования ослабленных сигналов и получения управляющего сигнала, регулятор (Н) обратной связи для возврата управляющего сигнала на устройство управления потоком мощности в энергосистеме (G), отличающийся тем, что дополнительно содержит средство для выделения каждой моды колебаний в сигналах данных фазоров, причем это средство содержит средство выбора моды и средство для определения вычета, имеющего максимальную норму в матрице вычетов выделенной моды.
6. Регулятор по п.5, в котором по меньшей мере один регулятор гасителя колебаний мощности является регулятором гасителя колебаний мощности MIMO, регулятором гасителя колебаний мощности SISO, регулятором гасителя колебаний мощности SIMO или регулятором гасителя колебаний мощности MISO.
7. Регулятор по п.6, в котором регулятор работает на глобальной платформе мониторинга и управления.
8. Регулятор по п.6, в котором регулятор работает на устройстве измерений фазоров.
9. Регулятор по п.6, в котором регулятор работает на устройстве управления потоком мощности.
10. Внутренняя память цифрового компьютера с загруженной компьютерной программой для демпфирования множественных электромагнитных колебаний в энергосистеме, характеризующаяся тем, что содержит управляющую компьютерную программу, обеспечивающую выполнение компьютером следующих операций: выделение мод колебаний в сигналах данных фазоров, получаемых по меньшей мере одним устройством (PMU) измерения фазоров электрических величин, с помощью средства выбора моды и средства для определения вычета, имеющего максимальную норму в матрице вычетов выделенной моды, ослабление сигнала каждой выделенной моды колебаний, суммирование ослабленных сигналов и получение управляющего сигнала, возврат управляющего сигнала на устройство управления потоком мощности в энергосистеме (G).
| Двойной колонковый снаряд | 1990 |
|
SU1737098A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУМЯ ПРЕОБРАЗОВАТЕЛЯМИ | 1998 |
|
RU2148290C1 |
| Способ предотвращения нарушения статической устойчивости линии электропередачи | 1977 |
|
SU699608A1 |
| US 5703791 A1, 30.12.1997 | |||
| JP 6113462 A, 22.04.1994. | |||

