Изобретение относится к области электротехники, а именно к управлению входными преобразователями электроподвижного состава переменного тока.
Известен способ управления четырехквадрантным преобразователем, заключающийся в том, что ток дросселя регулируют изменением продолжительности времени приложения к нему напряжения источника переменного напряжения или же разности напряжений источника переменного напряжения и емкости выходного фильтра, продолжительности приложения напряжения источника напряжения переменного тока и разности напряжений источника переменного напряжения и емкости выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала (см. книгу А.М.Солодунов, Ю.М.Иньков, Г.Н.Коваливкер, В.В.Литовченко. Преобразовательные устройства электропоездов с асинхронными тяговыми двигателями. Рига: Зинатне, 1991 г., с.104-108).
Этот способ не учитывает изменение значения индуктивного сопротивления контура протекания тока тягового трансформатора при движении электроподвижного состава.
Наиболее близким по технической сущности является способ управления четырехквадрантным преобразователем, состоящий в том, что ток дросселя регулируют изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и емкости выходного фильтра, продолжительности приложения напряжения источника напряжения переменного тока и разности напряжений источника переменного напряжения и емкости выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала сдвинутых относительно питающего напряжения на угол
 ,
,
где Х - индуктивное сопротивление контура протекания тока дросселя при приложении к нему напряжения источника переменного напряжения;
I - действующее значение тока дросселя;
U - действующее значение напряжения источника переменного напряжения (см. Литовченко В.В. 4q-S-Четырехквадрантный преобразователь электровозов переменного тока. // Изв. вузов. Электромеханика. 2000. №3. С.64-73).
Этот способ также не учитывает изменение входящего в формулу индуктивного сопротивления, включающего индуктивное сопротивление питающей сети, и не может обеспечить хорошее качество регулирования, т.к., если действующие значения тока дросселя и напряжения источника переменного напряжения можно измерить, то величина индуктивного сопротивления контура протекания тока, как правило, неизвестна. Поэтому при таком способе управления правильно определить и реализовать величину угла сдвига сигналов не представляется возможным.
Задачей изобретения является повышение энергетических показателей тягового электропривода за счет более точного определения угла сдвига ψ, а следовательно, сведения к минимуму угла сдвига фаз между напряжением сети и первой гармоникой входного тока преобразователя и повышения коэффициента мощности преобразователя.
Поставленная задача решается тем, что в известном способе управления четырехквадрантным преобразователем, при котором ток дросселя регулируют изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и емкости выходного фильтра, продолжительности приложения напряжения источника переменного напряжения и разности напряжении источника переменного напряжения и емкости выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых на угол
где Х - индуктивное сопротивление контура протекания тока дросселя при приложении к нему напряжения источника переменного напряжения;
I - действующее значение тока дросселя;
U - действующее значение напряжения источника переменного напряжения. Во время предыдущего приложения к дросселю напряжения источника переменного напряжения в предыдущем полупериоде вводят значение тока дросселя в начале и в конце приложения к нему напряжения источника переменного напряжения, а индуктивное сопротивление контура протекания тока дросселя определяют по формуле:
 ,
,
где Um - максимальное напряжение источника переменного напряжения;
i1 и i2 - значения тока дросселя в начале и в конце приложения к нему напряжения источника переменного напряжения;
ω - частота переменного напряжения;
t - время.
Определение величины индуктивного сопротивления контура протекания тока дросселя происходит с учетом индуктивного сопротивления питающей сети, что позволяет с большей точностью определить и реализовать необходимый угол сдвига ψ, тем самым улучшив регулировочные и энергетические свойства входного преобразователя.
Значение индуктивного сопротивления не обязательно определять в каждом полупериоде, а можно с интервалом времени, равным, например, 15 с, т.к. за это время при современных скоростях движения э.п.с. значение Х не может изменяться больше чем на 1÷2%, что соответствует точности измерения I и U.
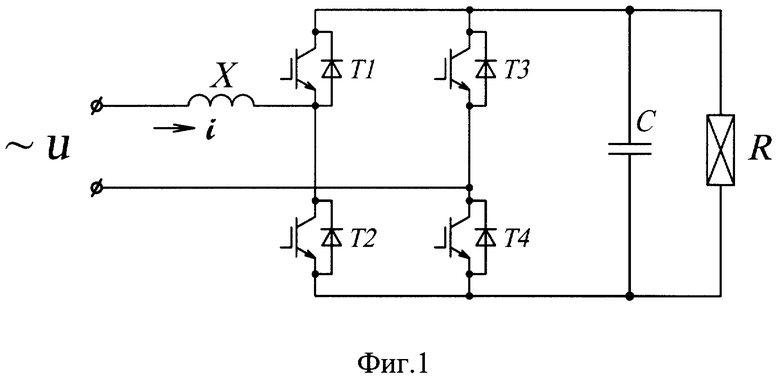
На фиг.1 показана принципиальная схема преобразователя;
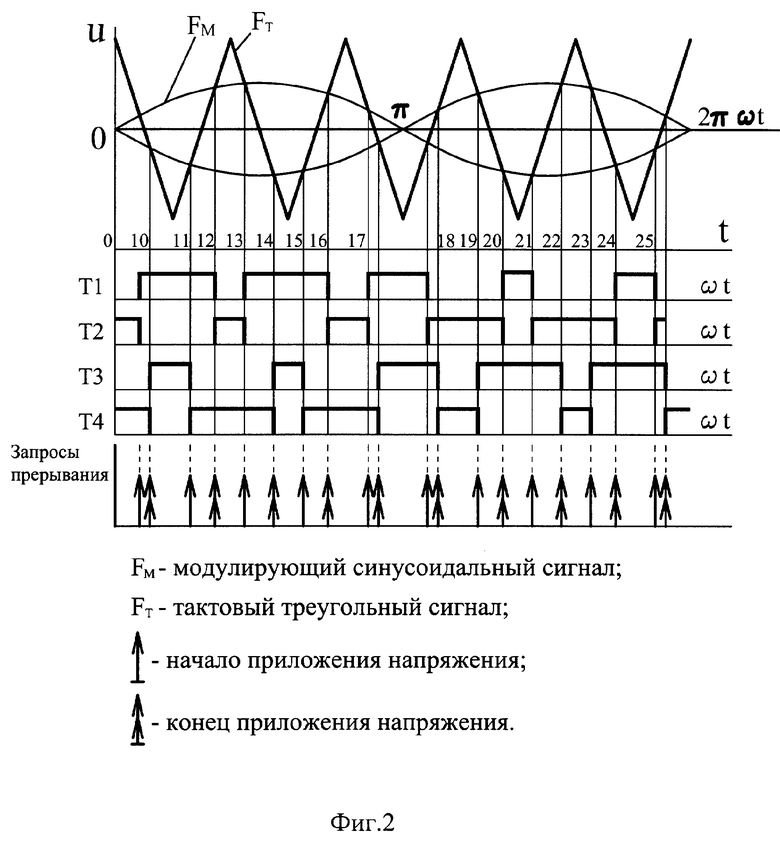
На фиг.2 - диаграмма переключения его вентилей;
На фиг.3 - устройство, реализующее данный способ управления;
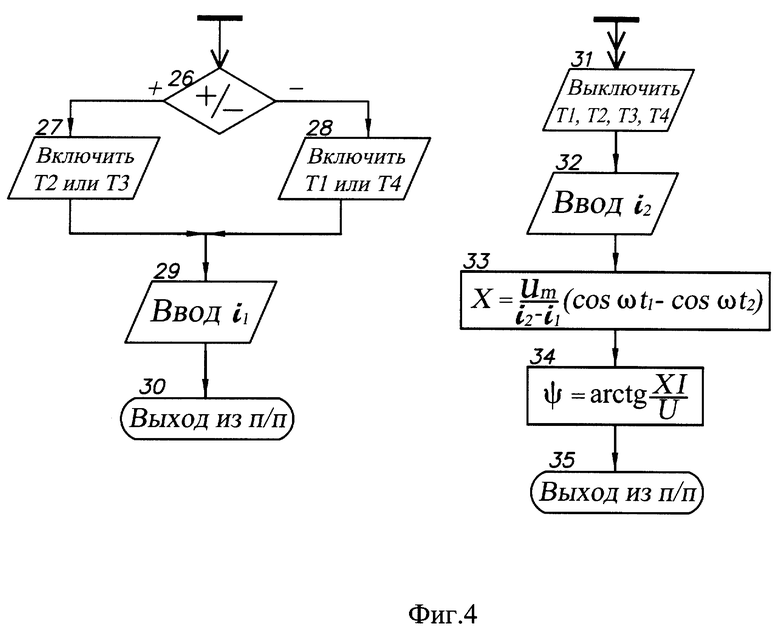
На фиг.4 - алгоритм функционирования устройства в текущем полупериоде.
Преобразователь 1 управляется микропроцессорной системой, состоящей из блока синхронизации 2, блока формирования прерываний 3, процессора 4, оперативного запоминающего устройства (ОЗУ) 5, постоянного запоминающего устройства (ПЗУ) 6, аналогово-цифрового преобразователя (АЦП) 7, блока ввода-вывода дискретных сигналов 8.
Входы-выходы блока формирования прерываний 3, процессор 4, ОЗУ 5, ПЗУ 6, АЦП 7, блок ввода-вывода дискретных сигналов 8 соединены шиной адресов-данных 9.
Таймер, процессор, ОЗУ, ПЗУ и АЦП могут быть интегрированы в специализированный контроллер, например, M167-1С (см. каталог продукции "Бортовая промышленная электроника" АО "Каскод", 105037 Москва, Измайловская пл., 7).
Выход блока ввода-вывода дискретных сигналов 8 соединен с управляющими цепями вентилей преобразователя 1, нагруженного на однофазную сеть переменного тока, с которой соединен и вход блока синхронизации 2, выход которого соединен со входами блока обработки прерываний 3, процессора 4, ОЗУ 5, ПЗУ 6, АЦП 7 и блока ввода-вывода дискретных сигналов 8.
Четырехквадрантный преобразователь 1 и синхронизатор 2 запитаны переменным напряжением, которое подается и на вход АЦП 7.
Способ реализуется алгоритмом, приведенным на фиг.4.
При переходе питающего напряжения через нулевое значение на выходе блока синхронизации 2 появляется импульс, который запускает блок формирования прерываний 3. На выходе блока формирования прерываний 3 появляются сигналы прерывания ↑ в моменты времени 10, 12, 14, 16, 18, 20, 22, 24 и  в моменты времени 11, 13, 15, 17, 19, 21, 23, 25. При приходе прерываний ↑ запускается подпрограмма прерывания, соответствующая началу приложения к дросселю напряжения источника переменного напряжения, а при приходе сигналов запускается подпрограмма, соответствующая окончанию приложения напряжения источника переменного напряжения.
в моменты времени 11, 13, 15, 17, 19, 21, 23, 25. При приходе прерываний ↑ запускается подпрограмма прерывания, соответствующая началу приложения к дросселю напряжения источника переменного напряжения, а при приходе сигналов запускается подпрограмма, соответствующая окончанию приложения напряжения источника переменного напряжения.
При превышении по модулю треугольным сигналом синусоидального осуществляют вход по прерыванию в подпрограмму ↑ и в положительном полупериоде питающего напряжения (блок 26, фиг.4) включают транзисторы Т2 или Т3 (блок 27), а в отрицательном - транзисторы Т1 или Т4 (блок 28), прикладывая к дросселю напряжение источника переменного напряжения, после чего вводят посредством АЦП 7 значение тока i1 (блок 29) и осуществляют выход из подпрограммы ↑ (блок 30).
При превышении по модулю синусоидальным сигналом треугольного (подпрограмма ) все транзисторы выключают (блок 31), вводят значение тока i2 (блок 32), определяют значение индуктивного сопротивления Х (блок 33) по формуле 
где Um - максимальное напряжение источника переменного напряжения;
i1 и i2 - значения тока дросселя в начале и в конце приложения к нему напряжения источника переменного напряжения;
ω - частота переменного напряжения;
t - время,
определяют значение угла сдвига ψ модулирующего синусоидального сигнала и тактового треугольного сигнала относительно напряжения источника переменного напряжения (блок 34) по формуле ,
где Х - индуктивное сопротивление контура протекания тока дросселя при приложении к нему напряжения источника переменного напряжения;
I - действующее значение тока дросселя;
U - действующее значение напряжения источника переменного напряжения
и выходят из подпрограммы (блок 35).
По приходу импульса синхронизации в следующем полупериоде питающего напряжения процессор 3 запускает блок формирования прерываний с учетом нового значения угла сдвига ψ.
Корректировку угла ψ можно производить не в каждом полупериоде питающего напряжения, а один раз, например, в 15 с, т.к. скорость перемещения электровоза по участку гораздо меньше скорости протекания электромагнитных процессов.
Таким образом, учет изменения реактивного сопротивления питающей сети позволяет точнее сформировать моменты переключения вентилей преобразователя, обеспечив требуемый угол сдвига между напряжением и током питающей сети и необходимый коэффициент мощности преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЁХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ФОРМИРОВАНИЕМ МОДУЛИРУЮЩЕГО СИГНАЛА | 2008 |
|
RU2396690C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2006 |
|
RU2315416C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
| СПОСОБ ФОРМИРОВАНИЯ СЕТЕВОГО ТОКА ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2009 |
|
RU2419950C2 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТОЙ ЧЕТЫРЕХКВАДРАНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2005 |
|
RU2305361C2 |
| Четырехквадрантный преобразователь | 2015 |
|
RU2622889C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2003 |
|
RU2261519C2 |
Изобретение относится к области электротехники и может быть использовано в выпрямительных установках с принудительной коммутацией, в качестве входных преобразователей на электроподвижном составе переменного тока. Техническим результатом является повышение энергетических показателей тягового электропривода, повышение коэффициента мощности. В способе управления четырехквадрантным преобразователем моменты переключения вентилей преобразователя определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, фаза которых сдвинута относительно напряжения питающей сети на угол, зависящий от реактанса питающей сети. Регулирование фазы сдвига сигналов осуществляют с учетом изменяющегося, приведенного к вторичной обмотке трансформатора, реактивного сопротивления питающей сети, определяемого по формуле  , где Um - максимальное напряжение источника переменного напряжения; t1 и t2 - значения тока дросселя в начале и в конце приложения к нему напряжения источника переменного напряжения; ω - круговая частота переменного напряжения; t - время. 1 з.п. ф-лы, 4 ил.
, где Um - максимальное напряжение источника переменного напряжения; t1 и t2 - значения тока дросселя в начале и в конце приложения к нему напряжения источника переменного напряжения; ω - круговая частота переменного напряжения; t - время. 1 з.п. ф-лы, 4 ил.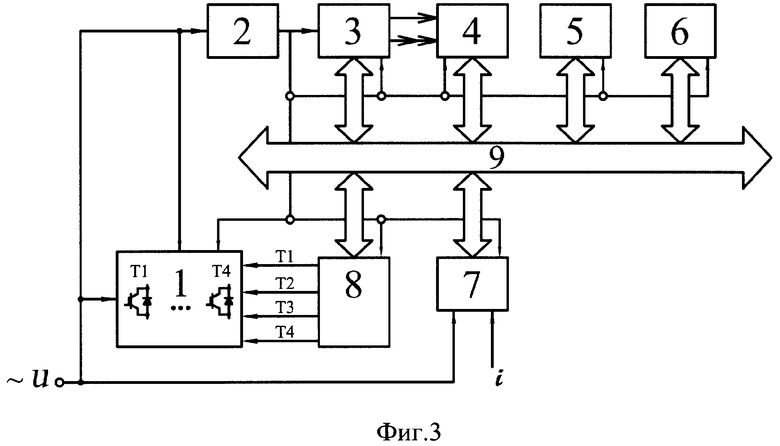
где Х - индуктивное сопротивление контура протекания тока дросселя при приложении к нему напряжения источника переменного напряжения;
I - действующее значение тока дросселя;
U - действующее значение напряжения источника переменного напряжения, отличающийся тем, что в предыдущем полупериоде питающего напряжения во время приложения к дросселю напряжения источника переменного напряжения вводят значение тока дросселя в начале и в конце приложения к нему напряжения источника переменного напряжения, а индуктивное сопротивление контура протекания тока дросселя определяют по формуле
где Um - максимальное напряжение источника переменного напряжения;
i1 и i2 - значения тока дросселя в начале и в конце приложения к нему напряжения источника переменного напряжения;
ω - круговая частота переменного напряжения;
t - время.
| ЛИТОВЧЕНКО В.В | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| «Известия вузов | |||
| Электромеханика», 2000, №3, с.64-73» | |||
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2003 |
|
RU2261519C2 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД МНОГОСИСТЕМНОГО ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2248892C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2046517C1 |
| Способ управления мостовым инвертором напряжения | 1989 |
|
SU1653106A1 |
| Устройство для управления компенсированным выпрямительно-инверторным преобразователем электроподвижного состава | 1987 |
|
SU1418111A1 |
| Способ прокладки балластируемого трубопровода | 1984 |
|
SU1252594A1 |
| US 4853832 A, 01.08.1989 | |||
| Способ лечения туберкулеза мочевого пузыря | 2018 |
|
RU2702607C1 |
| DE 3905701 A, 22.06.1989 | |||
| Приспособление для смазки ходовых колёс повозок, преимущественно комбайнов | 1939 |
|
SU61415A1 |

