Изобретение относится к области электротехники, а именно к управлению входными преобразователями электроподвижного состава переменного тока.
Известен способ управления четырехквадрантным преобразователем, заключающийся в том, что ток дросселя регулируют изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра, продолжительности приложения напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала (см. книгу А.М.Солодунов, Ю.М.Иньков, Г.Н.Коваливкер, В.В.Литовченко. Преобразовательные устройства электропоездов с асинхронными тяговыми двигателями. Рига: Зинатне, 1991 г. С.104-108).
Этот способ не учитывает наличие на э.п.с других потребителей электроэнергии индуктивного характера и не предполагает работу с заранее заданным углом сдвига между входными напряжением и током преобразователя.
Наиболее близким, по технической сущности, является способ управления четырехквадрантным преобразователем, состоящий в том, что в каждом полупериоде переменного напряжения измеряют действующее значение напряжения и тока дросселя и регулируют ток дросселя изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра, продолжительности приложения напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно питающего напряжения на угол
где X - суммарное индуктивное сопротивление источника переменного напряжения и дросселя;
I - действующее значение тока дросселя;
U - действующее значение напряжения источника переменного напряжения (см. Литовченко В.В. 4q-S-Четырехквадрантный преобразователь электровозов переменного тока // Изв. вузов. Электромеханика. 2000. №3. С.64-73).
Этот способ регулирования реализуется при отсутствии фазового сдвига между напряжением источника переменного напряжения и током дросселя. Однако на э.п.с присутствуют другие потребители электроэнергии индуктивного характера, потому общий коэффициент мощности тяговой единицы становится меньше заданного, как правило - 1,0.
Кроме того, этот способ предполагает измерение действующего значения напряжения источника переменного напряжения, т.е. контактной сети, что само по себе является нелегкой задачей, т.к. это напряжение, как правило, сильно искажено.
Задачей изобретения является повышение энергетических показателей э.п.с. за счет управления четырехквадрантным преобразователем с заданным, в том числе и опережающим, углом сдвига между напряжением источника переменного напряжения и потребляемым током (током дросселя), компенсирующим индуктивный характер других потребителей электроэнергии на э.п.с.
Поставленная задача решается тем, что в известном способе управления четырехквадрантным преобразователем, при котором в каждом полупериоде переменного напряжения измеряют действующее значение тока дросселя и напряжения выходного фильтра и регулируют ток дросселя изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра, продолжительности приложения напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно напряжения источника переменного напряжения на угол ψ, определяют разность между заданным и текущим напряжениями выходного фильтра, вводят эту разность в регулятор, уменьшают значение глубины модуляции на величину сигнала с выхода регулятора и определяют величину угла сдвига между напряжением источника переменного напряжения и синусоидальным модулирующим сигналом для следующего полупериода переменного напряжения по формуле
где Х - суммарное индуктивное сопротивление источника переменного напряжения и дросселя;
I - действующее значение тока источника переменной эдс;
U - напряжение конденсатора выходного фильтра;
ϕз - заданное значение угла сдвига между напряжением и током источника переменного напряжения;
μ - глубина модуляции, определяющая отношение амплитуды модулирующего синусоидального сигнала к амплитуде тактового треугольного сигнала.
Изменение глубины модуляции в соответствии с рассогласованием между заданным и текущим напряжениями конденсатора выходного фильтра и определение угла сдвига между входным напряжением преобразователя и модулирующим синусоидальным сигналом с учетом заданного угла сдвига между входными напряжением и током преобразователя и нового значения глубины модуляции, позволяет поддерживать на заданном уровне как выходное напряжение четырехквадрантного преобразователя, так и коэффициент мощности тяговой единицы во всем диапазоне изменения нагрузок, что выгодно отличает предлагаемое техническое решение от прототипа.
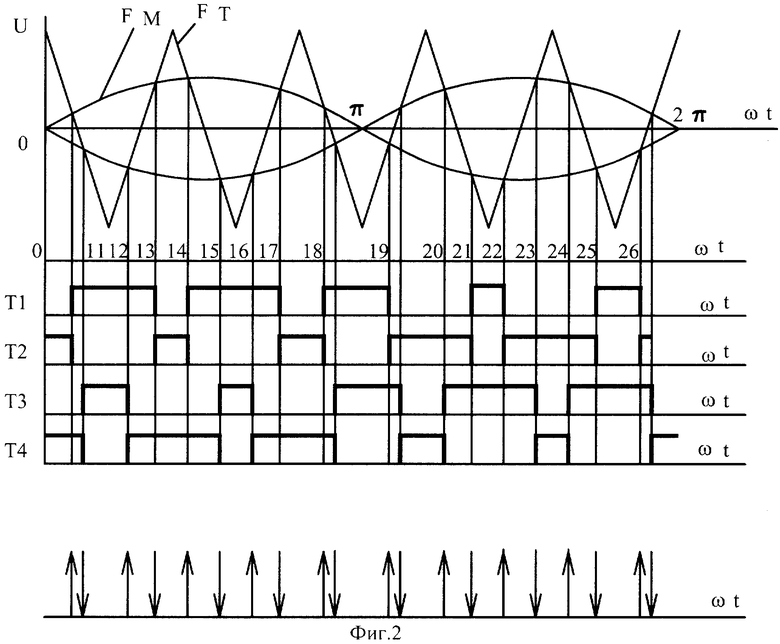
На фиг.1 показана принципиальная схема преобразователя; на фиг.2 - диаграмма переключения его вентилей; на фиг.3 - устройство, реализующее данный способ управления; на фиг.4 - алгоритм функционирования устройства в текущем полупериоде переменного напряжения.
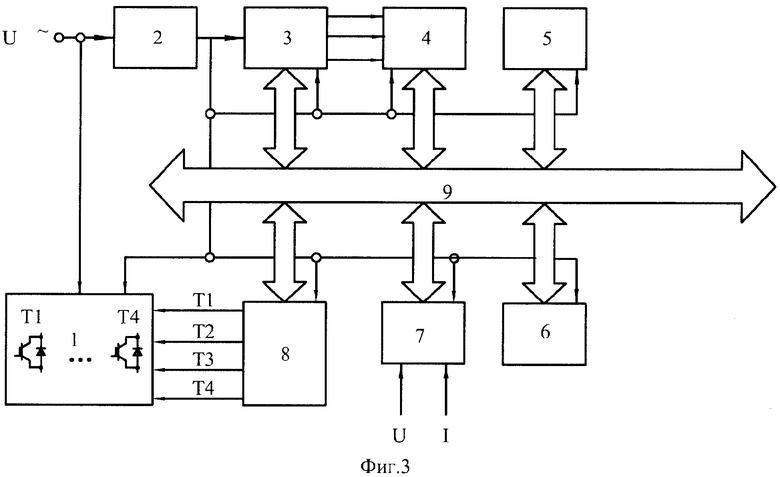
Преобразователь 1 (фиг.1) управляется микропроцессорной системой (фиг.3), состоящей из блока синхронизации 2, блока формирования прерываний 3, процессора 4, оперативного запоминающего устройства (ОЗУ) 5, постоянного запоминающего устройства (ПЗУ) 6, аналогово-цифрового преобразователя (АЦП) 7, блока ввода-вывода дискретных сигналов 8.
Входы-выходы блока формирования прерываний 3, процессора 4, ОЗУ 5, ПЗУ 6, АЦП 7, блока ввода-вывода дискретных сигналов 8 соединены шиной адресов-данных 9. Выход блока ввода-вывода дискретных сигналов 8 соединен с управляющими цепями вентилей преобразователя 1, нагруженного на однофазную сеть переменного напряжения, с которой соединен и вход блока синхронизации 2, выход которого соединен со входом блока обработки прерываний 3. Выходы 3 соединены с шинами прерывания процессора 4. На входы АЦП 7 подаются сигналы тока дросселя I и напряжения конденсатора выходного фильтра U.
Микропроцессорная система функционирует в соответствии с командами и константами, записанными в ПЗУ 6, причем в первом полупериоде питающего напряжения значение ψ задают в пределах 20÷25 эл.град, а начальное значение глубины модуляции μн определяют по номинальным параметрам преобразователя. Обычно это значение около 0,8.
Способ реализуется следующим образом.
При переходе питающего напряжения через нулевое значение на выходе блока синхронизации 2 появляется синхроимпульс СИ, который запускает блок формирования прерываний 3. При превышении по модулю треугольным сигналом синусоидального на выходе блока формирования прерываний 3 появляются сигналы прерывания «$» в моменты времени 11, 13, 15, 17, 19, 21, 23, 25. В моменты времени 12, 14, 16, 18, 20, 22, 24, 26, соответствующие превышению по модулю синусоидальным сигналом треугольного, формируется сигналом прерывания «#» (фиг.2). При приходе запроса прерываний «$» запускается подпрограмма прерывания «$», соответствующая началу приложения к дросселю напряжения источника переменного напряжения, а при приходе запроса прерываний «#» запускается подпрограмма «#», соответствующая приложению к дросселю разности напряжений источника переменного напряжения и конденсатора выходного фильтра (фиг.4).
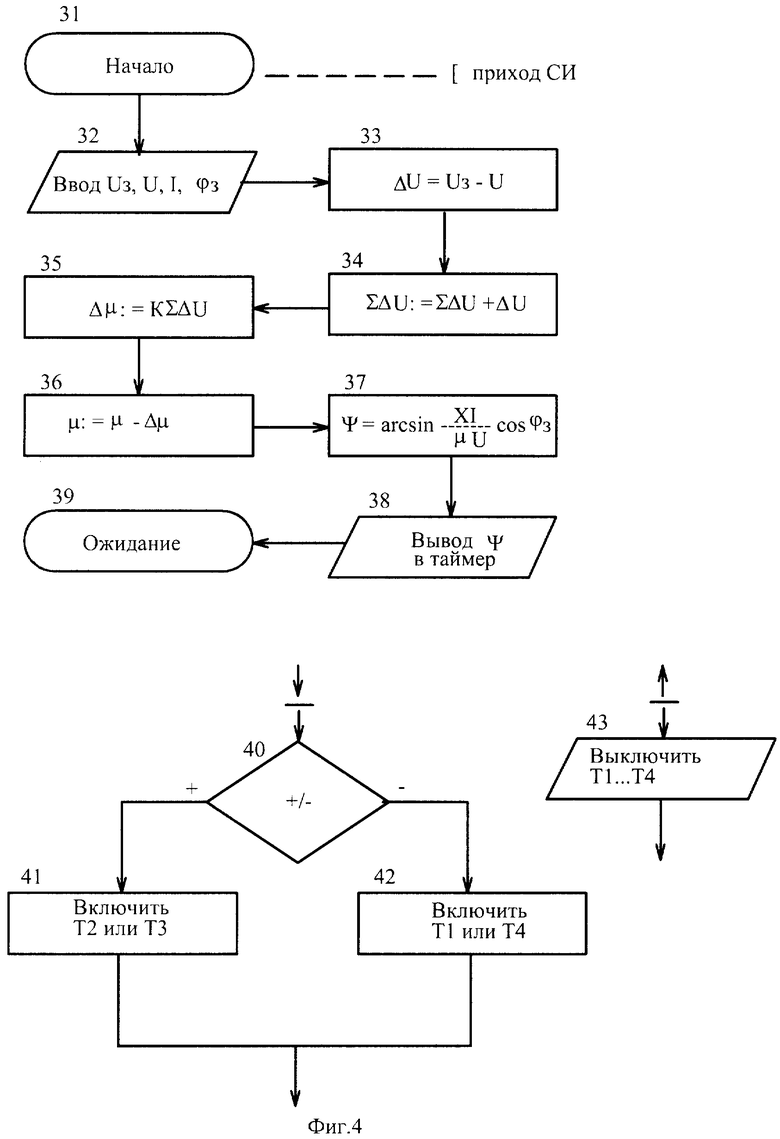
По синхроимпульсу СИ запускается основная подпрограмма (блок 31, фиг.4), реализующая способ. Осуществляется ввод заданного Uз и текущего U значений выходного напряжения преобразователя, тока дросселя I и заданного значения угла сдвига ϕз между напряжением источника переменного напряжения и током дросселя (блок 32). В блоке 33 определяют разность ΔU между заданным Uз и текущим U напряжениями выходного фильтра, в блоках 34, 35 реализован интегральный, например, регулятор глубины модуляции: в блоке 34 интегрируют величину рассогласования между заданным и текущим напряжениями на конденсаторе выходного фильтра, а в блоке 35 формируется величина Δμ, уменьшающая номинальную глубину модуляции μн (блок 36). Номинальная глубина модуляции определяется параметрами четырехквадратного преобразователя и обычно равна 0,8, что и равно ее начальному значению. Затем, в блоке 37, определяют величину угла сдвига ψ между напряжением источника переменного напряжения и синусоидальным модулирующим сигналом для следующего полупериода переменного напряжения по формуле.
где Х - суммарное индуктивное сопротивление источника переменного напряжения и дросселя;
I - действующее значение тока источника переменного напряжения;
U - напряжение конденсатора выходного фильтра;
ϕз - заданное значение угла сдвига между напряжением и током источника переменного напряжения;
μ - глубина модуляции, определяющая отношение амплитуды модулирующего синусоидального сигнала к амплитуде тактового треугольного сигнала.
В блоке 38 величину угла ψ выдают в таймер, который запустится в следующем полупериоде переменного напряжения синхроимпульсом и сдвинет синусоидальный модулирующий сигнал на угол ψ, после чего процессор ожидает прихода следующего прерывания (блок 39).
Подпрограммы  и
и  (фиг.4) переключают вентили четырехквадрантного преобразователя Т1...Т4 (см. фиг.1, 2), обеспечивая регулирование тока дросселя приложением к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра.
(фиг.4) переключают вентили четырехквадрантного преобразователя Т1...Т4 (см. фиг.1, 2), обеспечивая регулирование тока дросселя приложением к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра.
В подпрограмме (фиг.4) в блоке 40 определяют знак полупериода переменного напряжения и в положительном полупериоде переменного напряжения включают транзистор Т2 или Т3(блок 41), а в отрицательном - Т1 или Т4 (блок 42), при этом к дросселю подключают только источник переменного напряжения. Вентили включают поочередно, чтобы уменьшить их токовую нагрузку.
В программе все вентили Т1...Т4 выключают (блок 43), включая дроссель на разность напряжений источника переменного напряжения и конденсатора выходного фильтра.
Таймер, процессор, ОЗУ, ПЗУ и АЦП могут быть интегрированы в специализированный контроллер, например M167-1С (см. каталог продукции «Бортовая промышленная электроника» АО «Каскод», 105037 Москва, Измайловская пл., 7).
Этот способ регулирования четырехквадрантного преобразователя учитывает наличие других потребителей электроэнергии на э.п.с и, работая с необходимым углом сдвига между входными напряжением и током, позволяет повысить коэффициент мощности локомотива в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЁХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ФОРМИРОВАНИЕМ МОДУЛИРУЮЩЕГО СИГНАЛА | 2008 |
|
RU2396690C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТОЙ ЧЕТЫРЕХКВАДРАНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2005 |
|
RU2305361C2 |
| СПОСОБ ПРОГНОЗИРУЮЩЕГО ВЕКТОРНОГО РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2004 |
|
RU2284635C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2006 |
|
RU2315416C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2005 |
|
RU2310263C2 |
| Четырехквадрантный преобразователь | 2015 |
|
RU2622889C1 |
Использование: в электротехнике, в выпрямительных установках с принудительной коммутацией, в качестве входных преобразователей на электроподвижном составе переменного тока. Сущность: поддерживают на выходе преобразователя заданное напряжение, изменяя глубину модуляции напряжения на входе преобразователя, при этом реализуют заданный угол сдвига между гармониками входного напряжения и тока, повышая технико-эксплуатационные показатели электровоза переменного тока в целом, учитывая работу всего электрооборудования. 4 ил.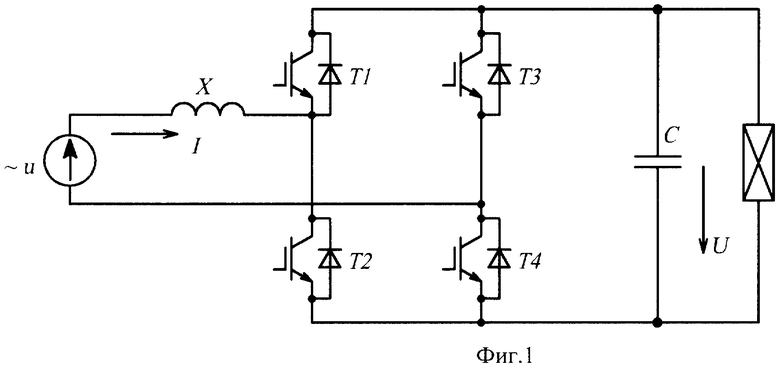
Способ управления четырехквадрантным преобразователем, заключающийся в том, что в каждом полупериоде переменного напряжения измеряют действующее значение тока дросселя и регулируют ток дросселя изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра, продолжительности приложения напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно напряжения источника переменного напряжения на угол ψ отличающийся тем, что в каждом полупериоде переменного напряжения измеряют значение напряжения конденсатора выходного фильтра, определяют разность между заданным и текущим напряжениями выходного фильтра, вводят эту разность в регулятор, уменьшают значение глубины модуляции на величину сигнала с выхода регулятора и определяют величину угла сдвига между напряжением источника переменного напряжения и синусоидальным модулирующим сигналом для следующего полупериода переменного напряжения по формуле
где X - суммарное индуктивное сопротивление источника переменного напряжения и дросселя;
I - действующее значение тока источника переменного напряжения;
U - напряжение конденсатора выходного фильтра;
ϕз - заданное значение угла сдвига между напряжением и током источника переменного напряжения;
μ - глубина модуляции, определяющая отношение амплитуды модулирующего синусоидального сигнала к амплитуде тактового треугольного сигнала.
| УНИВЕРСАЛЬНЫЙ МОДУЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2231907C2 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА В ЭНЕРГИЮ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2216845C2 |
| СПОСОБ ОЦЕНКИ УГЛОВЫХ НЕВЯЗОК КОМПЛЕКСА ПОДГОТОВКИ И ОЦЕНКИ ТОЧНОСТИ НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2001 |
|
RU2191350C2 |

