Настоящее изобретение касается проектирования трехмерных (3D) объектов и, в частности, способа и устройств обеспечения моделирования трехмерных объектов, позволяющих получать конкретную модель трехмерного объекта на основании родовой модели этого объекта и специфических моделей элементов этого объекта или специфической модели второго объекта, содержащей часть этого объекта.
Проектирование сложных систем, таких как самолеты, требует относительного позиционирования нескольких элементов. Как правило, позиционирование первого элемента по отношению ко второму требует участия специалистов разных профессий. Например, позиционирование двигателя на крыле самолета требует рекомендаций разработчиков двигателя, механиков, специалистов по аэродинамике, акустиков и специалистов многих других профессий.
Традиционно разработку позиционирования организуют в виде последовательных частичных анализов. Специалисты профессий, по которым последствия, связанные с выбором позиционирования, являются наиболее значительными, согласно заранее определенным критериям, начинают разработку и предлагают первое положение. После этого разработку передают специалисту другой профессии, который ее дополняет, и так далее. После того как специалисты всех вовлеченных профессий приняли участие в разработке, досье, как правило, передают каждому из них для утверждения результата. Если во время разработки позиционирование было изменено и по какой-либо отдельной профессии некоторые критерии не были выполнены, необходимо изменить позиционирование и повторить последовательность частичных анализов по каждой из профессий для утверждения нового положения.
Как правило, эти разработки основаны на цифровых трехмерных моделях реальных трехмерных объектов. Однако в ходе этого процесса часто случается, что в силу предписываемых условий форму позиционируемого объекта необходимо изменить. Если этот объект был разработан сторонней организацией, необходимо сделать запрос с целью получения частной версии цифровой модели этого объекта. Таким образом, анализ приостанавливают до получения новой модели. Если форму объекта необходимо менять несколько раз, это приводит к значительному увеличению сроков.
Кроме того, специфическая модель, полученная от сторонней организации, как правило, является статичной моделью, что не позволяет автоматизировать выполнение некоторых задач и некоторых расчетов, необходимых для некоторых разработок.
Использование родовой модели в некоторых обстоятельствах позволяет осуществить предварительную разработку, но отсутствие точности в родовой модели, как правило, не позволяет довести до конца точную разработку.
Поэтому возникает необходимость в создании реалистических и поддающихся параметризации конкретных моделей, в особенности для разработки позиционирования объектов, с которыми они связаны, по отношению к другим объектам.
Изобретение позволяет решить, по меньшей мере, одну из вышеуказанных проблем.
Таким образом, объектом изобретения является способ обеспечения геометрического моделирования первого объекта на основании родовой модели первого объекта и, по меньшей мере, одной специфической модели, по меньшей мере, одного второго объекта, содержащего, по меньшей мере, часть первого объекта, при этом способ содержит следующие этапы:
- получение родовой модели первого объекта;
- получение, по меньшей мере, одной специфической модели, по меньшей мере, одного второго объекта;
- извлечение, по меньшей мере, одного элемента данных из упомянутой, по меньшей мере, одной специфической модели согласно, по меньшей мере, одному параметру родовой модели; и
- построение конкретной модели первого объекта на основании родовой модели и упомянутого, по меньшей мере, одного элемента данных, извлеченного из упомянутой, по меньшей мере, одной специфической модели.
Предпочтительно упомянутый, по меньшей мере, один параметр родовой модели адаптируют к упомянутому, по меньшей мере, одному элементу данных, извлеченному из упомянутой, по меньшей мере, одной специфической модели, для построения конкретной модели.
Предпочтительно родовая модель является динамичной моделью, а специфическая модель является статичной моделью.
Создание конкретной модели трехмерного объекта на основании родовой модели позволяет получить динамичную модель, адаптированную для взаимодействия с прикладной программой проектирования. В частности конкретная модель позволяет изменять параметры этой модели и автоматизировать некоторые операции, такие как вычисления, в частности, оценки поверхностей и кривых линий.
Согласно частному варианту выполнения, упомянутый, по меньшей мере, один извлеченный элемент данных является участком кривой, характеризующим часть моделируемого объекта, который можно легко извлечь из упомянутой, по меньшей мере, одной специфической модели напрямую или при помощи прикладной программы проектирования. Этот участок кривой является, например, пересечением части второго объекта с заранее определенной плоскостью.
Согласно частному варианту выполнения, способ дополнительно содержит следующие этапы:
- определение экстремумов участка кривой, извлеченного из упомянутой, по меньшей мере, одной специфической модели; и
- адаптация участка кривой родовой модели, соответствующего участку кривой, извлеченному из упомянутой, по меньшей мере, одной специфической модели таким образом, чтобы экстремумы участка кривой родовой модели были подобны пределам участка кривой, извлеченного из упомянутой, по меньшей мере, одной специфической модели,
для быстрой и точной выверки участка кривой родовой модели по участку кривой, извлеченному из упомянутой, по меньшей мере, одной специфической модели.
Предпочтительно этап адаптации дополнительно содержит этап выверки, по меньшей мере, одной промежуточной точки, находящейся между экстремумами участка кривой родовой модели, для более точной выверки участка кривой родовой модели по участку кривой, извлеченному из упомянутой, по меньшей мере, одной специфической модели.
Предпочтительно этап адаптации содержит также этап определения, по меньшей мере, одной касательной к упомянутому участку кривой, извлеченному из упомянутой, по меньшей мере, одной специфической модели, по меньшей мере, в одной точке участка кривой родовой модели тоже для более точной выверки участка кривой родовой модели по участку кривой, извлеченному из упомянутой, по меньшей мере, одной специфической модели.
Согласно частному варианту выполнения, упомянутый, по меньшей мере, один второй объект соответствует первому объекту или является частью первого объекта, что позволяет создать конкретную модель объекта на основании специфической модели объекта или одного или нескольких элементов этого объекта.
Согласно частному варианту выполнения, способ дополнительно содержит этап импорта, по меньшей мере, одного элемента данных, при этом импортируемый элемент данных сохраняют в памяти в качестве параметра конкретной модели, что позволяет осуществлять обмен данными между конкретными моделями.
Согласно частному варианту выполнения, первый объект является трехмерным объектом, таким как гондола, двигатель или силовая установка.
Объектом изобретения является также устройство, содержащее средства, выполненные с возможностью осуществления каждого из этапов описанного выше способа.
Объектом изобретения является также компьютерная программа, содержащая команды, предназначенные для осуществления каждого из этапов описанного выше способа.
Другие преимущества, задачи и отличительные признаки настоящего изобретения будут более очевидны из нижеследующего подробного описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых изображено следующее.
Фиг.1 - пример прибора, позволяющего применять изобретение.
Фиг.2 - некоторые этапы, применяемые в изобретении для получения конкретной модели гондолы на основании специфической модели гондолы и родовой модели гондолы.
Фиг.3 - схематичная иллюстрация примера применения алгоритма адаптации сохраненного в памяти профиля в родовой модели к сохраненному в памяти профилю в специфической модели трехмерного объекта.
Фиг.4 - механизм, позволяющий конкретизировать родовую модель на основании конкретной модели.
Фиг.5 - некоторые этапы, применяемые в изобретении для получения конкретной модели силовой установки на основании родовой модели силовой установки, специфической модели гондолы и специфической модели двигателя.
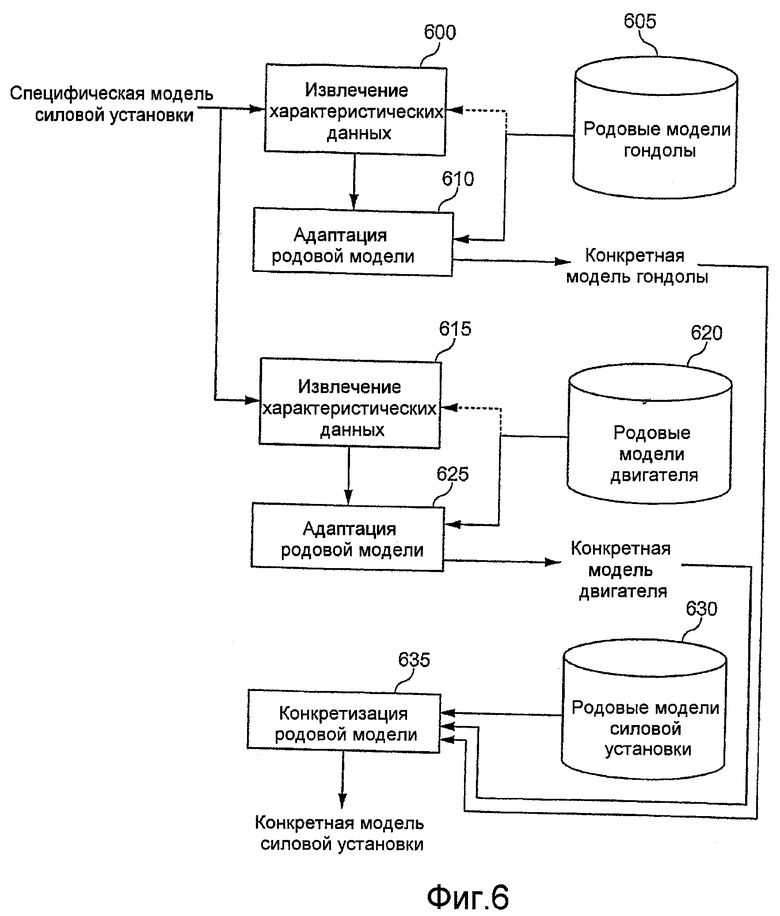
Фиг.6 - другой пример, в котором конкретную модель гондолы, конкретную модель двигателя и конкретную модель силовой установки получают на основании специфической модели силовой установки.
Способ и устройства в соответствии с настоящим изобретением являются инструментами обеспечения моделирования трехмерного объекта на основании родовой модели этого объекта и специфических моделей элементов этого объекта или специфических моделей других объектов, содержащих часть этого объекта, предназначенными, в частности, для реализации разработок силовых установок на обычных и других самолетах. Согласно частному варианту применения, этот способ использует прикладную программу трехмерного проектирования CATIA. Нижеследующее описание иллюстрирует применение изобретения в этом контексте. Вместе с тем понятно, что изобретение не ограничивается этим частным вариантом применения.
Программа “Catia”, разработанная французской компанией «Дассо Систем» и выпускаемая в продажу компанией IBM, является прикладной программой для системы автоматизированного проектирования (САПР) с ориентацией по трем измерениям, в которой можно осуществлять управление всеми этапами разработки изделия.
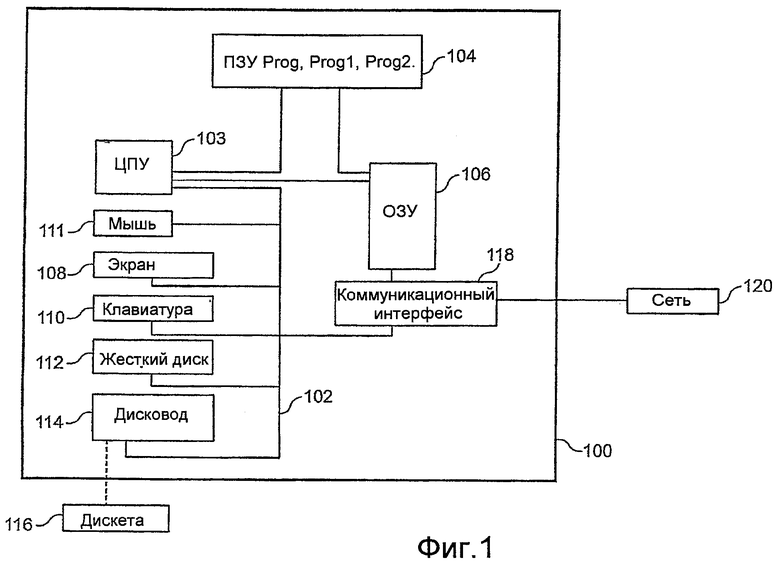
На фиг.1 показан пример прибора 100, выполненного с возможностью применения настоящего изобретения, такого как микрокомпьютер или рабочая станция.
Предпочтительно прибор 100 содержит коммуникационную шину 102, с которой соединены:
- центральный блок 103 обработки, такой как микропроцессор;
- постоянная память 104 или постоянное запоминающее устройство (ПЗУ), которое может содержать несколько программ “Prog”, “Prog1” и “Prog2”;
- оперативная память 106 или оперативное запоминающее устройство (ОЗУ), содержащее регистры, выполненные с возможностью записи переменных данных и параметров, создаваемых и изменяемых во время выполнения вышеуказанных программ; и
- коммуникационный интерфейс 118, соединенный с распределенной сетью 120 связи, например сетью Интернет, при этом интерфейс выполнен с возможностью передачи и приема данных.
Факультативно прибор 100 может также содержать одно, или несколько, или все следующие устройства:
- экран 108, позволяющий отображать данные и/или служить графическим интерфейсом для пользователя, который может взаимодействовать с программами в соответствии с настоящим изобретением при помощи клавиатуры 110 или любого другого средства, такого как устройство управления позицией курсора, например, такое как мышь 111, оптический карандаш, тактильный экран или пульт дистанционного управления;
- жесткий диск 112, который может содержать программы и/или данные, в частности, обработанные или предназначенные для обработки в соответствии с настоящим изобретением;
- дисковод 114, выполненный с возможностью введения в него дискеты 116 и считывания с нее или записи на нее обработанных данных или данных, предназначенных для обработки в соответствии с настоящим изобретением; и
- устройство считывания карт памяти, выполненное с возможностью считывания с них или записи на них данных, в частности обработанных данных или данных, предназначенных для обработки в соответствии с настоящим изобретением.
Коммуникационная шина обеспечивает связь и взаимодействие между различными элементами, включенными в прибор 100 или соединенными с этим прибором. Использование шины не является ограничительным, и, в частности, центральный блок выполнен с возможностью передачи команд любому элементу прибора 100 напрямую или через другой элемент прибора 100.
Исполнимый код программы или программ, позволяющий прибору 100 применять процесс в соответствии с настоящим изобретением, может быть сохранен на жестком диске 112 или в постоянной памяти 104.
Согласно варианту, дискета 116 может содержать данные, а также исполнимый код вышеуказанных программ, которые после считывания прибором 100 могут быть сохранены на жестком диске 112.
В альтернативном варианте исполнимый код программ может быть получен при помощи сети 120 связи через интерфейс 118 и сохранен так же, как это было указано выше.
Дискеты можно заменить любым носителем информации, например, таким как компакт-диск (CD-ROM) или карта памяти. Как правило, средство хранения информации, считываемое микрокомпьютером или микропроцессором, интегрированное в прибор или нет и, в случае необходимости, съемное, выполнено с возможностью сохранения в памяти одной или нескольких программ, исполнение которых обеспечивает осуществление способа в соответствии с настоящим изобретением.
Программу или программы можно загружать в одно из средств хранения информации прибора 100 непосредственно перед исполнением.
Центральный блок 103 управляет исполнением команд или частей кода программного обеспечения программы или программ в соответствии с настоящим изобретением, при этом команды сохранены на жестком диске 104, в постоянной памяти 104 или в других вышеуказанных элементах хранения информации. Во время подачи напряжения программа или программы, которые сохранены в энергонезависимом запоминающем устройстве, например на жестком диске 112 или в постоянной памяти 104, передаются в оперативную память 106 (ОЗУ), которая содержит исполнимый код программы или программ в соответствии с настоящим изобретением, а также регистры для записи переменных данных и параметров, необходимых для реализации изобретения.
Следует также отметить, что прибор, содержащий устройство в соответствии с настоящим изобретением, может быть также программируемым прибором. Команды программы или программ для реализации изобретения могут быть, например, установлены в программируемую или специализированную интегральную схему (Application Specific Integrated Curcuit, ASIC).
В фазе проектирования конструкторское бюро располагает, с одной стороны, родовыми моделями гондолы, двигателя и силовой установки и, с другой стороны, специфическими моделями гондолы, двигателя и силовой установки, предложенными поставщиками. Если родовые модели не могут быть использованы по причине отсутствия точных данных, то недостатком специфических моделей является то, что они не являются «динамичными», то есть их нельзя легко изменять, и они не позволяют автоматизировать некоторые вычисления, такие как вычисления масс или размеров, и производить некоторые оценки, такие как оценки конуса разброса при разрушении двигателя. Поэтому, согласно изобретению, основные характеристики специфической модели извлекают и добавляют в родовую модель для получения конкретной модели, поддающейся параметризации, и динамичной, которую можно использовать для разработок, таких как позиционирование силовой установки на крыле самолета.
Как правило, специфическая модель, получаемая от поставщика, является файлом, связанным со специальной прикладной программой системы автоматизированного проектирования САПР, то есть описывающим точки, кривые и объемы. Таким образом, геометрические характеристики специфических моделей, предлагаемых поставщиками, доступны, в частности, через программное обеспечение CATIA.
Родовые модели моделируемых объектов предпочтительно хранятся в памяти в виде templates, то есть параметрических моделей, связанных с трехмерной геометрией детали или узла деталей, и позволяют пользователю, не являющемуся специалистом в программном обеспечении САПР, легко отыскать и изменить параметр, зная только результат, которого он хочет добиться. Таким образом, использование параметрических моделей позволяет получить упрощенный интерфейс для изменения параметров, не меняя исходный код. Этот упрощенный интерфейс может представлять собой, например, диалоговые окна, позволяющие просматривать и изменять параметры в заранее определенных полях. Использование параметрических моделей позволяет также автоматизировать некоторые вычисления или некоторые задачи, такие как автоматическое обозначение размеров или вычисление масс.
Параметрическая модель гондолы позволяет, например, определить:
- внешнюю форму гондолы;
- форму реактивного сопла;
- центральное тело сопла;
- капоты двигателя и их ось вращения; и
- реверсоры тяги и их ось вращения.
Эти данные могут быть сохранены в памяти, например, в виде точек и профилей. Предпочтительно профили определяются совокупностью точек и касательных в этих точках, позволяющих соединять их кривыми. Каждый профиль соответствует пересечению кривой, характеризующей элемент объекта, связанного с моделью, с заранее определенной плоскостью.
Кроме того, предпочтительно каждая параметрическая модель содержит систему отсчета, позволяющую производить позиционирование одного объекта по отношению к другому. Например, системой отсчета гондолы является система координат, начало которой находится на оси гондолы на заранее определенном расстоянии от самой передней точки гондолы. Ось Х может быть осью гондолы, ось Y может быть осью, перпендикулярной к оси Х в горизонтальной плоскости, и ось Z может быть осью, перпендикулярной к оси Х в вертикальной плоскости.
Таким образом, профиль гондолы может быть определен по плоскости X-Y и по плоскости X-Z. В предпочтительном варианте по плоскости X-Z определяют два профиля - нижний профиль и верхний профиль, поскольку двигатели самолета, как правило, не являются симметричными относительно плоскости X-Y.
В зависимости от потребностей разработки можно создать несколько параметрических моделей одного трехмерного объекта. Например, одну параметрическую модель можно создать со всеми основными данными гондолы, тогда как другую параметрическую модель можно создать со всеми основными данными гондолы и дополнительно содержащую формулы расчета масс и рисков, связанных с позиционированием.
Точно так же параметрическая модель может быть связана с одним или несколькими трехмерными объектами. Например, одну параметрическую модель можно использовать для гондолы, а другую для двигателя, или одну параметрическую модель можно использовать для моделирования силовой установки, содержащей гондолу и двигатель.
В дальнейшем тексте описания специфическая модель относится к «статичной» модели трехмерного объекта, которая может рассматриваться как векторный чертеж, определенный совокупностью точек, линий и поверхностей. Как правило, специфическая модель является изображением объекта, получаемым от поставщика. Родовая модель является параметрируемой моделью, значения которой не инициализированы или инициализированы со значениями по умолчанию. Таким образом, значения параметров родовой модели могут быть любыми или могут быть заранее определены максимально близко к специфическим моделям. Конкретная модель является родовой моделью, некоторые значения которой были инициализированы. Конкретная модель является «динамичной» моделью, которая позволяет автоматизировать некоторые задачи или некоторые вычисления и параметры которой можно изменять. Конкретная модель динамично связана с другими конкретными моделями, например, для автоматизации расчетов и обновления значений, в частности значений размерности. Таким образом, родовую модель можно рассматривать как скелет конкретной модели.
На фиг.2 показаны некоторые этапы, применяемые в рамках настоящего изобретения для получения конкретной модели гондолы на основании специфической модели гондолы и родовой модели гондолы. Специфическую модель (200), полученную от поставщика, анализируют таким образом, чтобы извлечь основные данные (этап 205). В этом примере основные данные содержат, в частности, профиль гондолы по заранее определенным плоскостям. Если профили в специфической модели не доступны напрямую, их можно извлечь при помощи стандартной функции программного обеспечения проектирования. Основные данные определяются характером параметров родовой модели. Извлечение этих данных можно, таким образом, осуществлять автоматически согласно используемой родовой модели или вручную.
Данные, извлеченные из специфической модели, используют для адаптации параметров родовой модели (210) трехмерного объекта согласно алгоритму адаптации (215), описание которого следует ниже. Родовая модель, адаптированная согласно данным, извлеченным из специфической модели, образует конкретную модель (220). Конкретную модель можно использовать как таковую в программном обеспечении проектирования. Значения конкретной модели можно также использовать для создания сложных конкретных моделей (225). Например, значения конкретной модели гондолы можно использовать для конкретизации родовой модели силовой установки, значения которой, связанные с двигателем, могли быть или могут быть получены таким же способом.
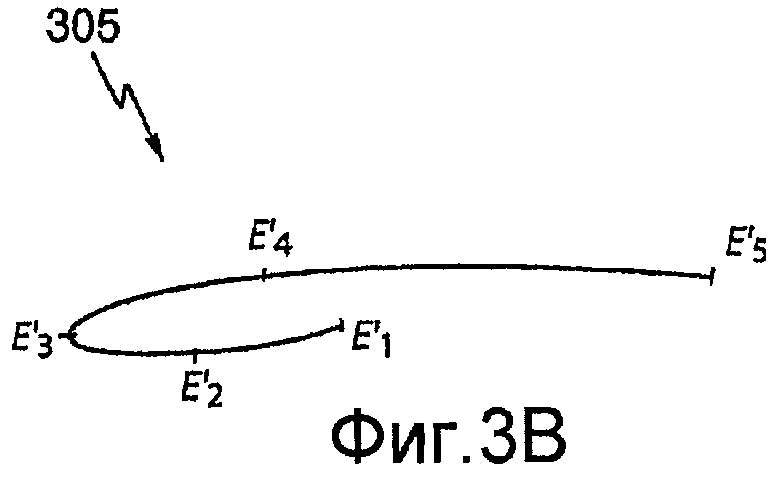
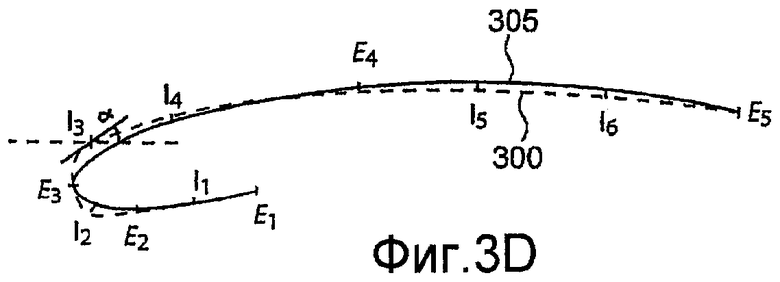
На фиг.3 показан пример алгоритма адаптации профиля, сохраненного в памяти в родовой модели, к профилю, сохраненному в памяти в специфической модели трехмерного объекта. На фиг.3а показан заранее определенный профиль (300) родовой модели гондолы, тогда как на фиг.3b показан профиль (305) специфической модели, соответствующий профилю 300 родовой модели. В этом примере адаптируемой кривой является верхний профиль гондолы, то есть кривая, образованная пересечением гондолы с плоскостью, образованной осями Х и Z. В данном случае профиль 300 родовой модели характеризуется пятью экстремумами (Е1-Е5) и шестью промежуточными точками (I1-I6), определенными по плоскостям, ортогональным к плоскости сечения профиля, а также углами касательных в каждой из этих точек. Таким образом, профиль 300 сам по себе не сохраняется в памяти как таковой в родовой модели, а сохраняются только упомянутые точки и углы касательных. Предпочтительно экстремумы (Е'1-Е'5) профиля 305 специфической модели определяются автоматически при помощи программного обеспечения проектирования. Когда экстремумы профиля, извлеченного из специфической модели, найдены, на профиле 300 родовой модели применяют геометрическое преобразование, как показано на фиг.3с, таким образом, чтобы экстремумы профиля родовой модели соответствовали экстремумам профиля специфической модели. Для каждой части профиля, определенной двумя соседними экстремумами, применяют отдельное преобразование.
Так, в примере, показанном на фиг.3с, экстремумы Е1 и Е2 с координатами соответственно (xE1;zE1) и (xE2;zE2) принимают значения экстремумов Е'1 и Е'2 соответственно с координатами (xE'1;zE'1) и (xE'2;zE'2). Вычисление новых координат промежуточной точки I1 происходит автоматически по положению экстремумов, углу касательной в этих точках и напряжениям касательных в этих точках (напряжение касательной определяет влияние касательной на точки вблизи точки, где находится касательная). Эта функция деформации кривой широко используется в программном обеспечении систем автоматизированного проектирования, поэтому ее подробное описание опускается.
На фиг.3d показано наложение профилей 300 и 305 после первой адаптации, связанной с наложением экстремумов.
Если промежуточные точки адаптированного профиля родовой модели не находятся на профиле специфической модели или вблизи профиля специфической модели, пользователь может переместить эти промежуточные точки. Согласно частному варианту выполнения, перемещение промежуточных точек осуществляют при помощи простого инкремента или декремента, который перемещает выбранную промежуточную точку вдоль профиля родовой модели, то есть путем перемещения плоскости, связанной с промежуточной точкой, в том или другом направлении. Пользователь может также изменить угол и напряжение касательной экстремумов и промежуточных точек для улучшения наложения адаптированного профиля родовой модели на профиль специфической модели. Например, пользователь может переместить точку I3 и выверить касательную (угол и напряжение) в этой точке таким образом, чтобы сблизить участки кривых, находящиеся между пределами Е3-Е4 и Е'3-Е'4.
На фиг.3е показаны профили 300 и 305 после адаптации пределов, промежуточных точек и углов и напряжений касательных.
Способ, описанный выше со ссылками на фиг.3, предпочтительно повторяют для всех общих профилей родовой модели и специфической модели. В альтернативном варианте этот способ повторяют для всех профилей совокупности выбранных профилей. Например, для модели гондолы этот способ повторяют для трех разных внешних профилей гондолы, для профиля реактивного сопла, для профиля центрального тела сопла, для профиля капотов двигателя и их оси вращения и для профиля реверсоров тяги и их оси вращения.
После адаптации всех профилей или всех выбранных профилей родовой модели родовая модель становится конкретной моделью.
Конкретную модель можно использовать напрямую в программном обеспечении проектирования. Ее можно также использовать для конкретизации другой родовой модели, например, более сложной родовой модели путем копирования переменных данных, общих для конкретной модели и для родовой модели.
Для конкретизации родовой модели на основании другой конкретной модели применяют решение, согласно которому экспортируют данные (или часть данных) конкретной модели, которые соответствуют переменным данным, общим для конкретной модели и для родовой модели, в виде текста и импортируют их в предназначенную для конкретизации родовую модель. Этот механизм показан на фиг.4. Данные конкретной модели (220) экспортируют (этап 400) в виде текста, например в виде текстового файла (405). Затем экспортированные данные (405) импортируют (этап 410) и сохраняют в другой родовой модели, обозначенной в виде сложной родовой модели (415), чтобы отличать ее от исходной родовой модели, для реализации сложной конкретной модели (425). При помощи этого же механизма можно также импортировать данные сложной конкретной модели в более простую родовую модель. Предпочтительно пользователь может выбирать экспортируемые или импортируемые параметры или профили.
На основании одной или нескольких специфических моделей элементов объекта можно создать конкретную модель этого объекта. Например, конкретную модель силовой установки можно создать на основании родовой модели силовой установки, специфической модели гондолы и специфической модели двигателя, как показано на фиг.5.
Параметрическая модель двигателя позволяет, например, определить:
- турбины;
- камеру сгорания;
- конус воздухозаборника; и
- передний и задний узлы подвески.
Использование систем координат параметрических моделей гондолы и двигателя, а также параметров, содержащихся в этих моделях, позволяет позиционировать двигатель относительно гондолы после конкретизации соответствующих родовых моделей, то есть когда параметрам приданы значения, позволяющие производить позиционирование.
На фиг.5 показаны различные этапы применения изобретения для получения конкретной модели силовой установки на основании родовой модели силовой установки, специфической модели гондолы и специфической модели двигателя.
Согласно этапу 500, кривые или профили и характеристические точки гондолы извлекают из специфической модели гондолы. Кривые и характеристические точки гондолы могут быть определены пользователем по параметрам используемой родовой модели силовой установки, могут быть выбраны в базе данных 505 или могут быть определены автоматически по параметрам этой родовой модели, выбранной пользователем. Выбранную родовую модель затем адаптируют к характеристическим данным, извлеченным из специфической модели гондолы (этап 510). На этом этапе изменяют только параметры, связанные с гондолой. Адаптацию родовой модели к кривым, извлеченным из специфической модели гондолы, предпочтительно осуществляют согласно способу, описанному ранее со ссылками на фиг.3. Точно так же, согласно этапу 515, кривые или профили и характеристические точки двигателя извлекают из специфической модели двигателя. Опять же кривые и характеристические точки двигателя могут быть определены пользователем по параметрам выбранной родовой модели или могут быть определены автоматически по этой модели. После этого родовую модель, частично конкретизированную по характеристикам гондолы, адаптируют к характеристическим данным, извлеченным из специфической модели двигателя (этап 520). Здесь так же адаптацию кривых, извлеченных из специфической модели двигателя, предпочтительно осуществляют согласно описанному выше способу. На этом этапе изменяют только параметры, связанные с двигателем.
Следует отметить, что этапы 515 и 520 можно выполнять как после, как и до этапов 500 и 510. Можно также выполнять только этапы 500 и 510 или этапы 515 и 520 в зависимости от потребностей, связанных с использованием полученной конкретной модели.
Полученная конкретная модель силовой установки характеризуется данными, извлеченными из специфических моделей гондолы и двигателя. Эту конкретную модель можно использовать в прикладной программе проектирования, такой как Catia.
На фиг.6 показан другой пример, в котором конкретную модель гондолы, конкретную модель двигателя и конкретную модель силовой установки можно получить на основании специфической модели силовой установки. Согласно этапу 600, кривые или профили и характеристические точки гондолы извлекают из специфической модели силовой установки. Кривые и характеристические точки гондолы могут быть определены пользователем по параметрам используемой родовой модели гондолы, могут быть выбраны пользователем в базе данных 605 или могут быть определены автоматически по этой модели. После этого выбранную родовую модель гондолы адаптируют к характеристическим данным, извлеченным из специфической модели силовой установки (этап 610). Предпочтительно адаптацию родовой модели к кривым, извлеченным из специфической модели силовой установки, осуществляют согласно способу, описанному выше со ссылками на фиг.3. Адаптация родовой модели гондолы с данными, извлеченными из специфической модели силовой установки, дает конкретную модель гондолы.
Точно так же, согласно этапу 615, кривые или профили и характеристические точки двигателя извлекают из специфической модели силовой установки. Кривые и характеристические точки двигателя могут быть определены пользователем по параметрам используемой родовой модели двигателя, могут быть выбраны пользователем в базе данных 620 или могут быть определены автоматически по этой модели. После этого выбранную родовую модель двигателя адаптируют к характеристическим данным, извлеченным из специфической модели силовой установки (этап 625). Предпочтительно адаптацию родовой модели к кривым, извлеченным из специфической модели силовой установки, тоже осуществляют согласно способу, описанному выше со ссылками на фиг.3. Адаптация родовой модели двигателя с данными, извлеченными из специфической модели силовой установки, дает конкретную модель двигателя.
Данные конкретных моделей гондолы и двигателя можно экспортировать для использования в другой родовой модели. Так, пользователь может выбрать родовую модель силовой установки в базе данных 630 и импортировать данные конкретных моделей гондолы и двигателя, определенных ранее, для конкретизации родовой модели силовой установки (этап 635).
Естественно, для удовлетворения специфических потребностей специалист в области, к которой относится изобретение, может вносить изменения в приведенное выше описание.




Изобретение относиться к проектированию трехмерных (3D) объектов. Техническим результатом является расширение функциональных возможностей за счет создания реалистических и поддающихся параметризации конкретных моделей, в особенности для разработки позиционирования объектов, с которыми они связаны, по отношению к другим объектам. Способ и устройства обеспечения моделирования трехмерных объектов позволяют получить параметрируемую конкретную модель трехмерного объекта на основании родовой модели этого объекта и специфической модели второго объекта, содержащего, по меньшей мере, часть этого первого объекта. Согласно изобретению, некоторые характеристические данные извлекают из специфической модели второго трехмерного объекта по параметрам родовой модели первого трехмерного объекта. Параметрируемую конкретную модель строят на основании родовой модели первого трехмерного объекта для адаптации этой модели к извлеченным данным. 3 н. и 10 з.п. ф-лы, 10 ил.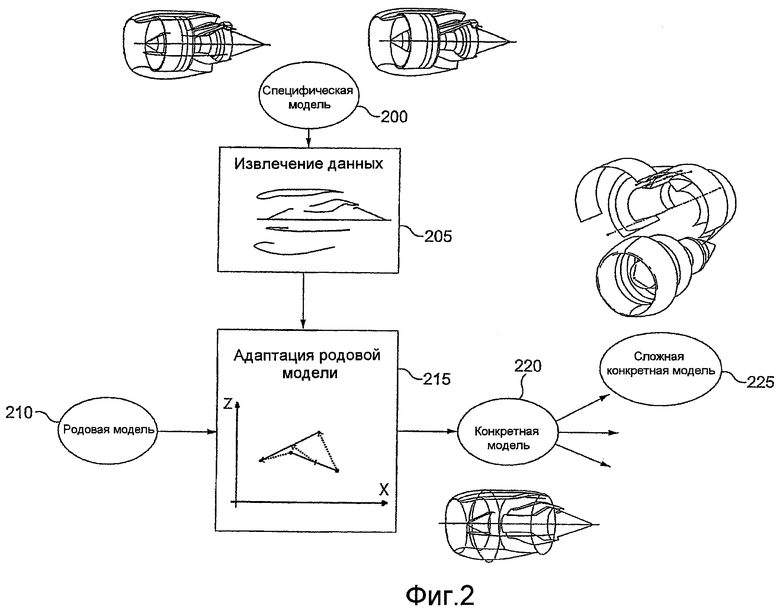
1. Способ обеспечения геометрического моделирования первого объекта на основании родовой модели упомянутого первого объекта и, по меньшей мере, одной специфической модели, по меньшей мере, одного второго объекта, содержащего, по меньшей мере, часть упомянутого первого объекта, отличающийся тем, что содержит следующие этапы:
- получение упомянутой родовой модели (210) упомянутого первого объекта;
- получение, по меньшей мере, одной специфической модели (200) упомянутого, по меньшей мере, одного второго объекта;
- извлечение, по меньшей мере, одного элемента данных из упомянутой, по меньшей мере, одной специфической модели согласно, по меньшей мере, одному параметру упомянутой родовой модели (205); и
- построение (215) конкретной модели упомянутого первого объекта на основании упомянутой родовой модели и упомянутого, по меньшей мере, одного элемента данных, извлеченного из упомянутой, по меньшей мере, одной специфической модели.
2. Способ по п.1, отличающийся тем, что упомянутый, по меньшей мере, один параметр упомянутой родовой модели адаптируют к упомянутому, по меньшей мере, одному элементу данных, извлеченному из упомянутой, по меньшей мере, одной специфической модели, для построения упомянутой конкретной модели.
3. Способ по п.1 или 2, отличающийся тем, что упомянутая родовая модель является динамичной моделью, и тем, что упомянутая, по меньшей мере, одна специфическая модель является статичной моделью.
4. Способ по п.1, отличающийся тем, что упомянутый, по меньшей мере, один извлеченный элемент данных является участком кривой (305).
5. Способ по п.4, отличающийся тем, что дополнительно содержит следующие этапы:
- определение экстремумов (Е'1-Е'5) упомянутого участка кривой, извлеченного из упомянутой, по меньшей мере, одной специфической модели; и
- адаптация участка кривой (300) упомянутой родовой модели, соответствующего упомянутому участку кривой (305), извлеченному из упомянутой, по меньшей мере, одной специфической модели, таким образом, чтобы экстремумы (Е1-Е5) упомянутого участка кривой упомянутой родовой модели были подобны экстремумам (Е'1-Е'5) упомянутого участка кривой, извлеченного из упомянутой, по меньшей мере, одной специфической модели.
6. Способ по п.5, отличающийся тем, что упомянутый этап адаптации дополнительно содержит этап выверки, по меньшей мере, одной промежуточной точки (I1-I6), находящейся между упомянутыми экстремумами (Е1-Е5) упомянутого участка кривой упомянутой родовой модели.
7. Способ по любому из пп.5 и 6, отличающийся тем, что упомянутый этап адаптации дополнительно содержит этап определения, по меньшей мере, одной касательной к упомянутому участку кривой, извлеченному из упомянутой, по меньшей мере, одной специфической модели, по меньшей мере, в одной точке упомянутого участка кривой упомянутой родовой модели.
8. Способ по п.1, отличающийся тем, что упомянутый, по меньшей мере, один второй объект соответствует упомянутому первому объекту или является частью упомянутого первого объекта.
9. Способ по п.1, отличающийся тем, что дополнительно содержит этап импортирования (410), по меньшей мере, одного элемента данных, при этом упомянутый импортируемый элемент данных сохраняют в памяти в качестве параметра упомянутой конкретной модели.
10. Способ по п.1, отличающийся тем, что упомянутый первый объект является трехмерным объектом.
11. Способ по п.10, отличающийся тем, что упомянутый первый объект является гондолой, двигателем или силовой установкой.
12. Устройство, содержащее средства, выполненные с возможностью осуществления каждого из этапов способа по любому из пп.1-11.
13. Средство хранения информации, считываемое компьютером, содержащее компьютерную программу, содержащую команды, предназначенные для осуществления каждого из этапов способа по любому из пп.1-11.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| 0 |
|
SU250779A1 | |
| US 20060173338 А1, 03.08.2006 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО РАСЧЕТА ФОРМЫ ОБЪЕМНЫХ ТЕЛ | 1998 |
|
RU2158960C2 |

