Настоящее изобретение касается проектирования трехмерных объектов, состоящих из нескольких элементов, и, в частности, оно касается способа и устройств помощи в позиционировании, во время фазы проектирования, первого объекта относительно второго объекта согласно совокупности геометрических и математических условий.
Проектирование сложных устройств, таких как самолеты, требует относительного позиционирования множества элементов. Как правило, позиционирование одного первого элемента по отношению к второму требует участия специалистов разных профессий. Например, позиционирование двигателя на крыле самолета требует рекомендаций разработчиков двигателя, механиков, специалистов по аэродинамике, акустиков и специалистов многих других профессий.
Традиционно разработку позиционирования организуют в виде последовательных частичных анализов. Специалисты профессий, по которым последствия, связанные с выбором позиционирования, являются наиболее значительными, согласно заранее определенным критериям начинают разработку и предлагают первое положение. После этого разработку передают специалисту другой профессии, который ее дополняет, и так далее. После того как специалисты всех вовлеченных профессий приняли участие, досье опять передают каждому из них для утверждения результата. Если во время разработки позиционирование было изменено и по какой-либо отдельной профессии некоторые критерии не были выполнены, необходимо изменить позиционирование и повторить последовательность частичных анализов по каждой из профессий для утверждения нового положения.
В силу большого числа разных вовлеченных профессий, как правило, динамического управления процессом добиться невозможно. Отсюда следуют потери во времени и недостаточное общее представление о процессе, которое должно, в принципе, позволять специалистам каждой профессии без каких-либо затруднений вникать в проблематику другой профессии.
Таким образом, возникает необходимость в оптимизации размещения первого объекта по отношению ко второму объекту в сложной среде, характеризующейся совокупностью условий и требующей участия специалистов разных профессий.
Изобретение позволяет решить, по меньшей мере, одну из вышеуказанных проблем.
В связи с этим объектом изобретения является способ помощи в позиционировании первого объекта по отношению ко второму объекту согласно, по меньшей мере, одному условию, связанному с относительным положением первого и второго объектов, отличающийся тем, что содержит следующие этапы:
- выбор параметрической модели, связанной с каждым первым и вторым объектами;
- вывод на экран цифровой модели второго объекта согласно параметрической модели, связанной со вторым объектом;
- позиционирование первого объекта относительно второго объекта по параметрам параметрических моделей, связанных с первым и вторым объектами;
- вывод на экран цифровой модели первого объекта согласно параметрической модели, связанной с первым объектом, и согласно позиционированию;
- выбор, по меньшей мере, одной параметрической модели, содержащей моделирование упомянутого, по меньшей мере, одного условия;
- для упомянутой, по меньшей мере, одной параметрической модели, содержащей моделирование упомянутого, по меньшей мере, одного условия:
• получение, по меньшей мере, одного элемента данных, связанного с положением, по меньшей мере, одного из первого и второго объектов;
• оценка упомянутого, по меньшей мере, одного условия по упомянутому, по меньшей мере, одному элементу данных.
Способ в соответствии с настоящим изобретением позволяет вести разработку позиционирования по многим параметрам и условиям с использованием простого интерфейса. Кроме того, способ позволяет учитывать будущие условия, которые можно легко добавить в разработку.
Предпочтительно способ дополнительно содержит этап изменения, по меньшей мере, одного параметра, по меньшей мере, одной из параметрических моделей, связанных с первым и вторым объектами, при этом этапы
• получения, по меньшей мере, одного элемента данных, связанного с положением, по меньшей мере, одного из первого и второго объектов; и
• оценки упомянутого, по меньшей мере, одного условия по упомянутому, по меньшей мере, одному элементу данных
выполняют повторно для упомянутой, по меньшей мере, одной параметрической модели, содержащей моделирование упомянутого, по меньшей мере, одного условия, после изменения упомянутого, по меньшей мере, одного параметра. Динамическое и ассоциативное управление объектами и условиями позволяет пользователю оптимизировать позиционирование объекта согласно большому числу условий при помощи быстрого анализа влияния изменений на условия.
В частном варианте выполнения способ дополнительно содержит этап вывода на экран результата оценки упомянутого, по меньшей мере, одного условия. Предпочтительно вывод на экран содержит вывод графической индикации, связанной с упомянутым, по меньшей мере, одним условием, таким образом, чтобы визуальный анализ положения графической индикации относительно, по меньшей мере, одной из цифровых моделей, связанных с первым и вторым объектами, позволил подтвердить положение первого объекта согласно упомянутому, по меньшей мере, одному условию. Альтернативно или дополнительно вывод на экран содержит вывод на экран, по меньшей мере, одного значения, позволяющего подтвердить положение первого объекта согласно упомянутому, по меньшей мере, одному условию.
Согласно частному варианту выполнения параметрическая модель, содержащая моделирование упомянутого, по меньшей мере, одного условия, включена в одну из параметрических моделей, связанных с первым и вторым объектами. Альтернативно, по меньшей мере, один элемент данных упомянутой, по меньшей мере, одной параметрической модели, содержащей моделирование упомянутого, по меньшей мере, одного условия, импортируют из одной из параметрических моделей, связанных с первым и вторым объектами. Моделирование условий в параметрических моделях, предназначенных для позиционирования объектов, или использование специфических данных параметрических моделей, связанных с первым и вторым объектами, позволяет осуществлять функциональную организацию параметрических моделей, а также свести число параметров параметрических моделей только к необходимым параметрам.
Согласно частному варианту выполнения второй объект содержит, по меньшей мере, часть летательного аппарата.
Согласно частному варианту выполнения упомянутое, по меньшей мере, одно условие связано, по меньшей мере, с одним из следующих положений: положение люков, положение трап-лотков, положение земли, относительное положение земли во время посадки при боковом ветре и относительное положение земли во время посадки с невыпущенным передним шасси.
Согласно частному варианту выполнения первый объект содержит, по меньшей мере, часть силовой установки летательного аппарата.
Согласно частному варианту выполнения упомянутое, по меньшей мере, одно условие связано с аэродинамикой, по меньшей мере, части первого объекта, с подвижными деталями, по меньшей мере, части первого объекта, с риском разрушения, по меньшей мере, части первого объекта или с шумом или теплом, которые может излучать, по меньшей мере, часть первого объекта.
Объектом изобретения является также устройство, содержащее средства, выполненные с возможностью осуществления каждого из этапов описанного выше способа.
Объектом изобретения является также компьютерная программа, содержащая команды, предназначенные для осуществления каждого из этапов описанного выше способа.
Другие преимущества, задачи и отличительные признаки настоящего изобретения будут более очевидны из нижеследующего подробного описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг.1 представляет пример прибора, позволяющего применять изобретение.
Фиг.2 - схематичная иллюстрация примера среды разработки позиционирования силовой установки на самолете в соответствии с настоящим изобретением, а также связей между этой разработкой и вовлеченными профессиями.
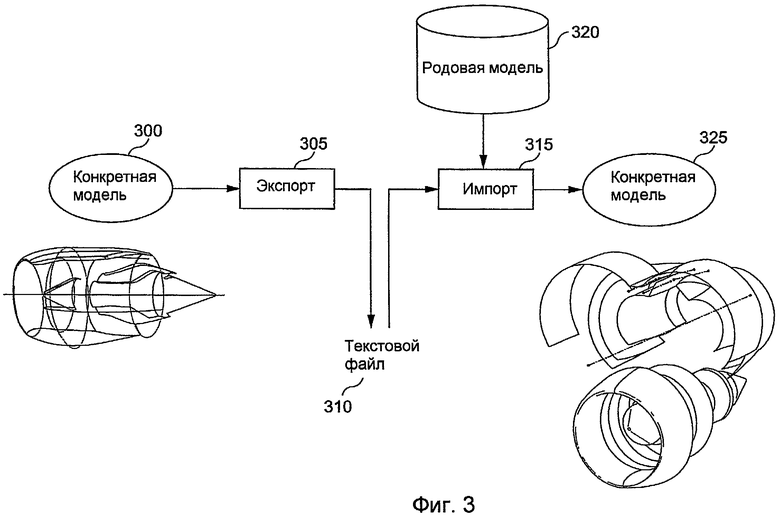
Фиг.3 - пример механизма реализации родовой параметрической модели на основании конкретной модели.
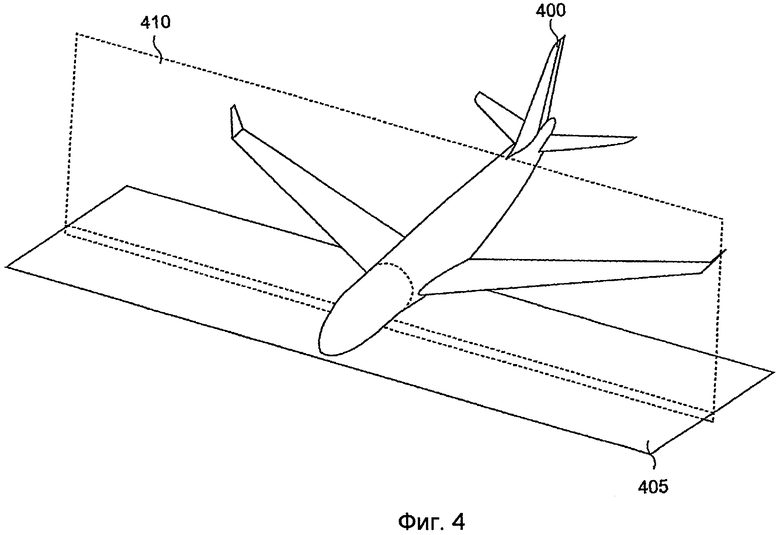
Фиг.4 - самолет, используемая геометрическая система координат, а также границы, связанные с землей при посадке с невыпущенным передним шасси и с открыванием люков.
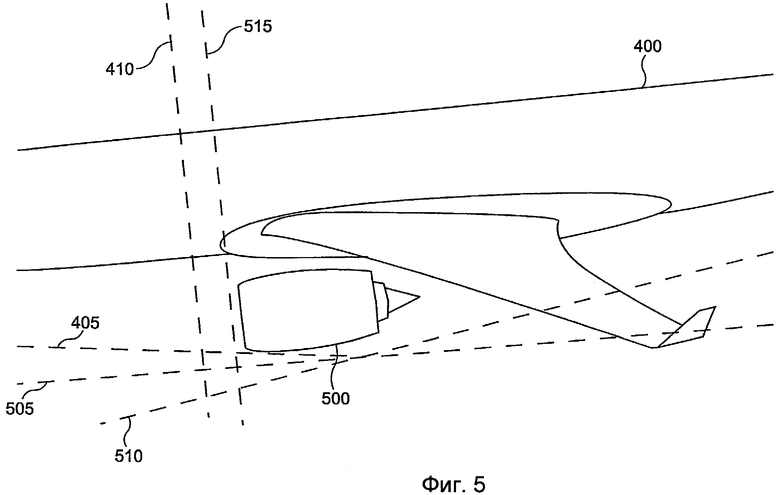
Фиг.5 - вид сбоку самолета, на крыле которого позиционируют гондолу, а также граничные плоскости трап-лотков и люков.
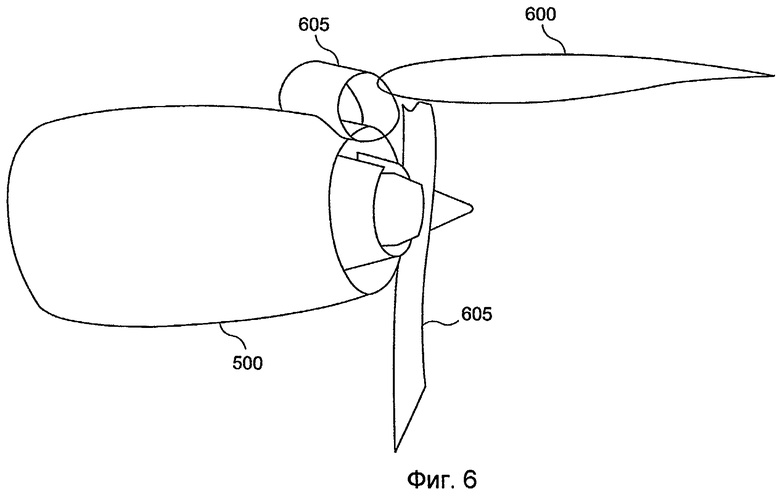
Фиг.6 - позиционирование гондолы под крылом самолета, позволяющее производить визуальный анализ этого положения по отношению к аэродинамическим границам сверхдавления.
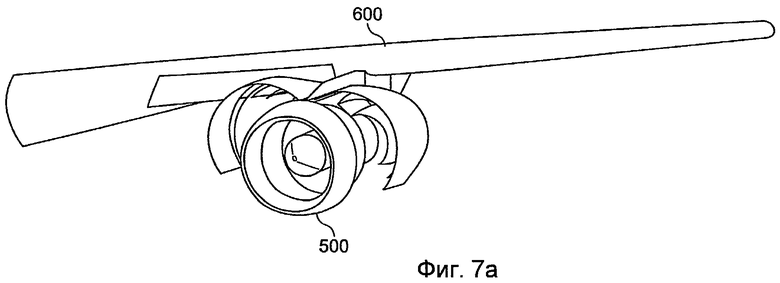
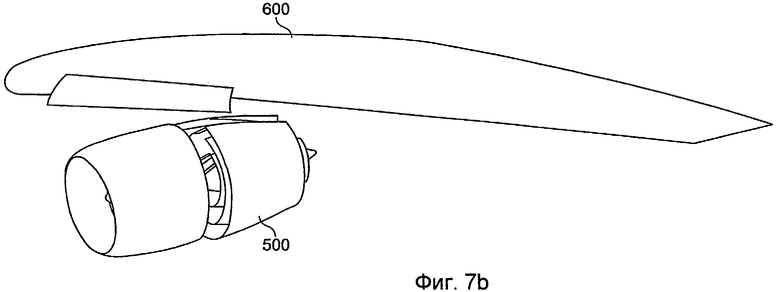
Фиг.7, в том числе фиг.7а и 7b, - иллюстрация подтверждения позиционирования гондолы согласно условиям, связанным с реверсом тяги, и согласно условиям, связанным с открыванием капотов двигателя для его технического обслуживания, соответственно.
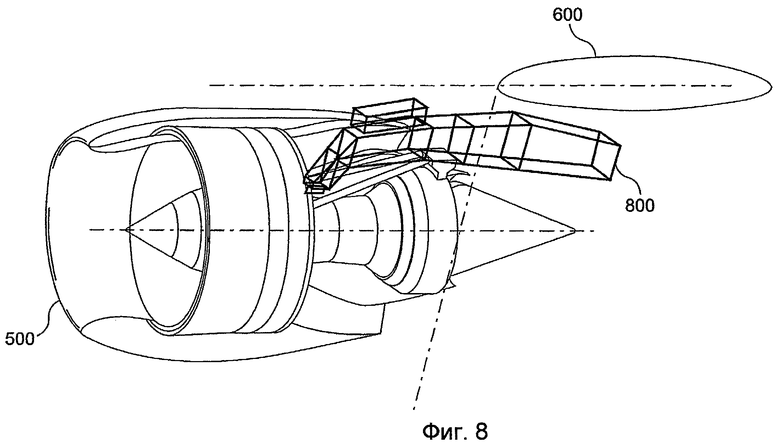
Фиг.8 - вид каркасного пилона, соединяющего силовую установку с крылом самолета.
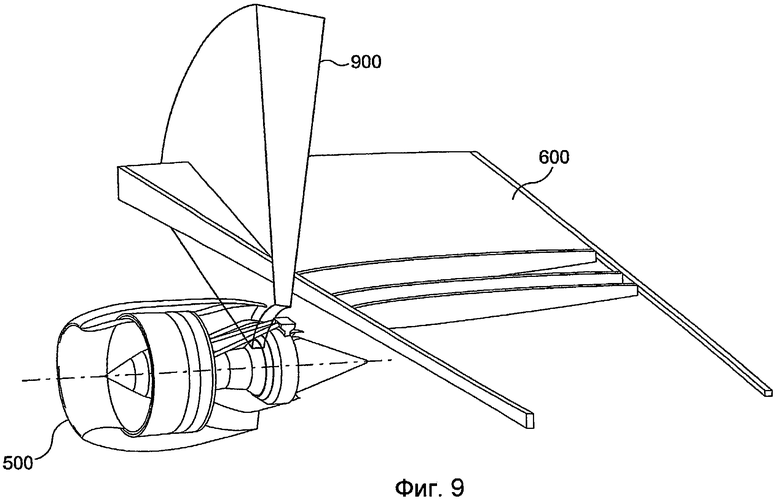
Фиг.9 - конус разрушения турбинных лопаток.
Фиг.10 - схема некоторых этапов примера выполнения изобретения.
Способ в соответствии с настоящим изобретением является трехмерным инструментом подтверждения, предназначенный, в частности, для реализации разработок силовых установок на обычных и других самолетах. Согласно частному варианту применения этот способ использует прикладную программу трехмерного проектирования “Catia” для обеспечения ассоциативности между геометрическими моделями и редактор параметров для изменения значения параметров геометрических моделей. Нижеследующее описание иллюстрирует применение изобретения в этом контексте, вместе с тем понятно, что изобретение не ограничивается этим частным вариантом применения.
Программа “Catia”, разработанная французской компанией «Дассо Системз» и выпускаемая в продажу компанией IBM, является прикладной программой для системы автоматизированного проектирования (САПР) с ориентацией по трем измерениям, в которой можно осуществлять управление всеми этапами разработки изделия.
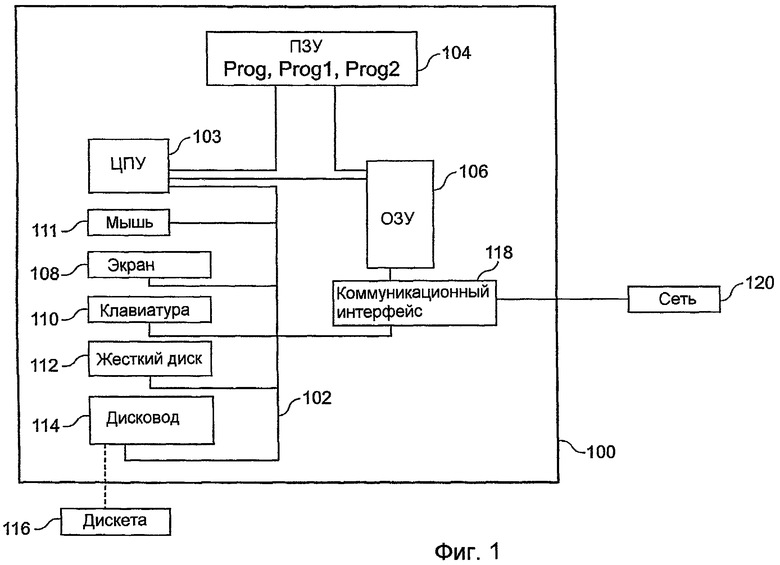
На фиг.1 показан пример прибора 100, выполненного с возможностью применения настоящего изобретения, такого как микрокомпьютер или рабочая станция.
Предпочтительно прибор 100 содержит коммуникационную шину 102, с которой соединены:
- центральный блок 103 обработки, такой как микропроцессор;
- постоянная память 104 или постоянное запоминающее устройство (ПЗУ), которое может содержать несколько программ “Prog”, “Prog1” и “Prog2”;
- оперативная память 106 или оперативное запоминающее устройство (ОЗУ), содержащая регистры, выполненные с возможностью записи переменных и параметров, создаваемых и изменяемых во время выполнения вышеуказанных программ; и
- коммуникационный интерфейс 118, соединенный с распределенной сетью 120 связи, например сетью Интернет, при этом интерфейс выполнен с возможностью передачи и приема данных.
Факультативно прибор 100 может также содержать одно или несколько или все следующие устройства:
- экран 108, позволяющий просматривать данные и/или служить графическим интерфейсом для пользователя, который может взаимодействовать с программами в соответствии с настоящим изобретением при помощи клавиатуры 110 или любого другого средства, такого как устройство управления позицией курсора, например такое как мышь 111, оптический карандаш, тактильный экран или пульт дистанционного управления;
- жесткий диск 112, который может содержать программы и/или данные, в частности обработанные или предназначенные для обработки данные в соответствии с настоящим изобретением;
- дисковод 114, выполненный с возможностью введения в него дискеты 116 и считывания с нее или записи на нее обработанных данных или данных, предназначенных для обработки в соответствии с настоящим изобретением; и
- устройство считывания карт памяти, выполненное с возможностью считывания с них или записи на них данных, в частности обработанных данных или данных, предназначенных для обработки в соответствии с настоящим изобретением.
Коммуникационная шина обеспечивает связь и взаимодействие между различными элементами, включенными в прибор 100 или соединенными с этим прибором. Использование шины не является ограничительным, и, в частности, центральный блок выполнен с возможностью передачи команд любому элементу прибора 100 напрямую или через другой элемент прибора 100.
Исполнимый код программы или программ, позволяющий прибору 100 применять процесс в соответствии с настоящим изобретением, может быть записан на жестком диске 112 или в постоянной памяти 104.
Согласно варианту дискета 116 может содержать данные, а также исполнимый код вышеуказанных программ, которые после считывания прибором 100 могут быть записаны на жесткий диск 112.
В альтернативном варианте исполнимый код может быть получен при помощи сети 120 связи через интерфейс 118 и записан так же, как это было указано выше.
Дискеты можно заменить любым носителем информации, например таким как компакт-диск (CD-ROM) или карта памяти. Как правило, средство хранения информации, считываемое микрокомпьютером или микропроцессором, интегрированное в прибор или нет и, в случае необходимости, съемное, выполнено с возможностью записи на него одной или нескольких программ, исполнение которых обеспечивает осуществление способа в соответствии с настоящим изобретением.
Программу или программы можно загружать в одно из средств хранения информации прибора 100 непосредственно перед исполнением.
Центральный блок 103 управляет исполнением команд или частей кода программного обеспечения программы или программ в соответствии с настоящим изобретением, при этом команды записаны на жестком диске 104, в постоянной памяти 104 или в других вышеуказанных элементах хранения информации. Во время подачи напряжения программа или программы, которые записаны в энергонезависимом запоминающем устройстве, например на жестком диске 112 или в постоянной памяти 104, передаются в оперативную память 106 (ОЗУ), которая содержит исполнимый код программы или программ в соответствии с настоящим изобретением, а также регистры для записи переменных и параметров, необходимых для реализации изобретения.
Следует также отметить, что прибор, содержащий устройство в соответствии с настоящим изобретением, может быть также программируемым прибором. Команды или программы(ы) для реализации изобретения могут быть, например, установлены в программируемую или специализированную интегральную схему (Application Specific Integrated Curcuit, ASIC).
В прикладной программе проектирования параметрические модели или templates, связанные с трехмерной геометрией детали или узла деталей, позволяют не пользователю, не являющемуся специалистом в прикладной программы автоматизированного проектирования, легко отыскать и изменить параметр, зная только результат, которого он хочет добиться. Таким образом, использование параметрических моделей позволяет получить упрощенный интерфейс для изменения параметров, не меняя исходный код. Этот упрощенный интерфейс может представлять собой, например, диалоговое окно, позволяющее просматривать и изменять параметры в заранее определенных полях. Использование этих параметрических моделей позволяет также программировать некоторые условия в виде математических отношений. Параметрические модели позволяют также представить результаты, основанные на заранее определенных математических отношениях и на параметрах или геометрических данных, определенных пользователем. Наконец, ассоциативная среда параметрических моделей обеспечивает обмен информацией, позволяющий, например, производить позиционирование трехмерных деталей относительно друг друга, а также обеспечивает доступ к информации, используемой для вычисления некоторых характеристик трехмерных деталей, связанных с параметрическими моделями.
Параметрические модели могут быть связаны с трехмерными геометрическими элементами. Таким образом, можно выделить цифровую модель из параметрической модели, позволяющую визуально отобразить элемент или часть элемента, с которым связана параметрическая модель. Положение этих элементов можно определить по отношению к другим элементам этой же параметрической модели или по отношению к элементам другой параметрической модели. Если какой-либо элемент изменен или перемещен, программа автоматизированного проектирования соответственно изменяет относительные положения всех рассматриваемых элементов, независимо от параметрической модели, к которой они принадлежат.
Модуль помощи в позиционировании основан на использовании параметрических моделей, хранящихся в каталоге, который представляет собой полностью ассоциативный набор. Каждая параметрическая модель имеет специфическое назначение. Некоторые связаны с частями самолета, например с гондолой и двигателем, другие отображают функциональные категории, например землю и траекторию фрагментов двигателя в случае его разрушения. В зависимости от осуществляемой разработки можно использовать разные параметрические модели одного и того же трехмерного объекта.
Позиционирование двигателя на самолете является компромиссом между несколькими параметрами, такими как:
- аэродинамические взаимодействия между двигателем и крылом, между пилоном (соединение между крылом и силовой установкой, состоящей из гондолы и двигателя) и двигателем и между фюзеляжем, стабилизаторами и двигателем;
- масса пилона, а также размеры и конструкция усилений крыла или фюзеляжа;
- масса взлетно-посадочных шасси;
- размеры вертикальных стабилизаторов;
- потеря подъемной силы крыльев;
- конструкция подвижных частей (закрылки, передние кромки, элероны);
- уровень шума, создаваемого двигателем; и
- столкновение фрагмента лопатки с конструкцией самолета и жизненно важными системами.
Система в соответствии с настоящим изобретением позволяет учитывать эти условия на всех типах самолетов для позиционирования одного или нескольких двигателей. Согласно примеру применения этой системы позиционирование двигателя, определяемое пользователем, автоматически подтверждается, например, относительно следующих данных:
- расстояние между гондолой и
• землей (статичная земля, земля во время посадки при боковом ветре и земля во время посадки, когда переднее шасси не выпущено);
• передним люком кабины; и
• трап-лотком переднего люка кабины;
- реализуемость, размер и форма гондолы;
- реализуемость, размер и форма двигателя;
- реализуемость, размер и форма конструкции первичного пилона (крепление гондолы и крепление двигателя);
- реализуемость, размер и форма конструкции передней и задней вспомогательных стоек;
- масса стоек (главной и вспомогательной);
- аэродинамические коэффициенты, такие как лобовое сопротивление, возникающее в результате установки двигателя под крылом;
- последствия воздействия разрушения двигателя на конструкцию и системы самолета;
- позиционирование стоек на гондоле, двигателе и крыле;
- открывание гондолы для операций технического обслуживания и реверс тяги;
- влияние позиционирования двигателя на шум двигателя, ощущаемый в самолете и на земле;
- влияние позиционирования двигателя на температуры, которые должны выдерживать некоторые части самолета; и
- влияние струй воды от взлетно-посадочных шасси на позиционирование двигателя.
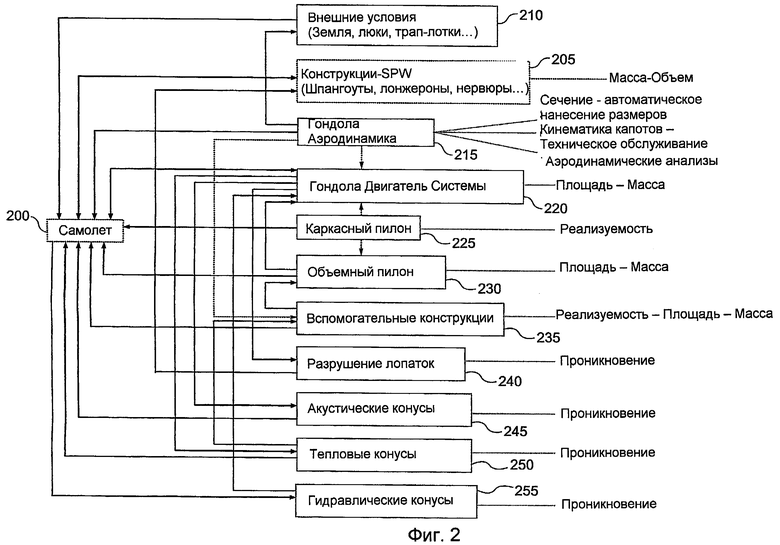
На фиг.2 схематично показаны пример среды разработки позиционирования силовой установки на самолете в соответствии с настоящим изобретением, а также связи между этой разработкой и вовлеченными профессиями. Каждый прямоугольник представляет собой отдельный тип анализа. Стрелки показывают основную причинно-следственную связь. Пунктирные стрелки соответствуют передаче данных между модулями в виде текста. Пунктирные линии иллюстрируют пример данных, определенных во время анализа, которые могут быть экспортированы из прикладной программы, например в виде текстового файла. Прямоугольники, показанные пунктирными линиями, представляют собой внешние модули, используемые для разработки.
Предпочтительно каждый тип анализа связан с отдельной параметрической моделью, при этом некоторые данные некоторых параметрических моделей являются общими. Например, данные, связанные с гондолой, используют для аэродинамического исследования гондолы (215) и для исследования силовой установки, состоящей из гондолы и двигателя. Как будет описано ниже со ссылками на фиг.3, данные одной параметрической модели могут быть перенесены в другую параметрическую модель, используя, например, функцию экспорта и импорта данных в текстовом режиме согласно заранее выбранному набору параметров.
Как было упомянуто выше, оптимальное позиционирование двигателя на самолете связано с геометрическими условиями и с математическими условиями. Под геометрическими условиями следует понимать условия, которые можно анализировать визуально, чтобы определить, выполнены они или нет. Математические условия анализируют путем сравнения вычисленных значений с пределами, определенными специалистом.
Среди геометрических условий фигурирует связь между самолетом и землей относительно фаз посадки и взлета. Эти условия анализируются группой специалистов и могут быть сгруппированы в параметрической модели 210. Эта модель взаимодействует, в частности, с моделью самолета и с моделью гондолы таким образом, чтобы виртуальная земля, связанная с характеристикой самолета, была представлена пользователю, чтобы он мог определить зазоры между землей и гондолой в зависимости от определенного положения. Точно так же границы, связанные с положением люков и трап-лотков, могут быть представлены в виде плоскостей, позволяющих пользователю определить правильность положения гондолы в зависимости от зазора между этими плоскостями и гондолой.
Другой набор геометрических условий связан с аэродинамическими проблемами, такими как лобовое сопротивление, создаваемое вследствие положения двигателя под крылом. Эти условия анализируются другой группой специалистов и могут быть сгруппированы в параметрической модели 215. Эта параметрическая модель может также содержать другие условия, в частности условия, связанные с техническим обслуживанием, такие как открывание капотов.
Результаты анализа могут быть чисто визуальными, такими как вывод на экран виртуальной земли, и могут быть аналитическими, такими как вывод на экран аэродинамических коэффициентов или вывод на экран размеров и сечений. Отображение изобарных поверхностей, а также отображение гондолы с открытыми капотами и с активированными реверсорами тяги позволяют пользователю контролировать визуально положение гондолы согласно этим условиям. Аналитические результаты могут быть экспортированы, например, в виде текста, для использования в другом модуле программы автоматизированного проектирования или в другой прикладной программе, как показано на фиг.2. Анализ аналитических результатов обеспечивает более точный анализ, чем визуальный анализ.
Другая часть анализа позиционирования силовой установки касается реализуемости этой установки. Этот анализ можно осуществить при помощи использования отдельной параметрической модели (220), данные которой, связанные с гондолой, получают из параметрической модели гондолы 215. Пользователь может визуально контролировать реализуемость такой установки. Он может также получить численные результаты, такие как значения массы и площади. Эти результаты можно экспортировать, например, в виде текста.
Анализ позиционирования силовой установки может также касаться соединения между силовой установкой и крылом самолета, то есть пилона крепления. Предпочтительно этот анализ осуществляют в ходе двух отдельных фаз. Первая фаза связана с реализуемостью. Предпочтительно в этой фазе используют каркасное отображение пилона, которым легче манипулировать и для которого вращение ощущается легче, чем на поверхностном отображении, которое, кроме того, может создать проблемы на уровне программы автоматизированного проектирования, когда пилон не может быть физически реализован (ошибки в программе). Достоверность, определенная пользователем по визуальному анализу каркасного отображения, может быть сохранена в параметрической модели и может, таким образом, быть экспортирована для использования в другой параметрической модели или в другой прикладной программе. Если пользователь установил, предпочтительно визуально, что пилон является реализуемым, на второй фазе можно осуществить поверхностный или объемный анализ для рассмотрения других типов данных, таких как площадь и масса. Для каждой из этих двух фаз (225 и 230) предпочтительно используют отдельную параметрическую модель. Данные параметрической модели, связанной с каркасным отображением пилона, предпочтительно экспортируют на параметрическую модель, связанную с объемным отображением пилона. Поверхностное или объемное отображение пилона может быть выведено на экран. Численные результаты, такие как масса и площадь, предпочтительно вычисляются автоматически в параметрической модели. Эти результаты могут быть экспортированы.
Анализ пилона может быть продолжен анализом вспомогательных конструкций, касающихся, в частности, аэродинамических элементов, по меньшей мере, частично закрывающих пилон, и других наружных элементов пилона, используемых между силовой установкой и крылом. Наружные элементы, охваченные вспомогательными конструкциями, содержат, в частности, электрические соединения и системы транспортировки текучих сред (воздух, топливо и т.д.). Предпочтительно параметрическую модель используют для этого анализа, на основании которого пользователь может определить, например, реализуемость вспомогательных конструкций, их массу и их площадь. Отображение вспомогательных конструкций или части вспомогательных конструкций может быть выведено на экран. Численные результаты, в частности связанные с реализуемостью, такие как масса и площадь, предпочтительно вычисляются автоматически в параметрической модели. Как и в предыдущем случае, эти результаты могут быть экспортированы.
Необходимо также контролировать положение двигателя в зависимости от условий, связанных с конструкцией самолета и с риском разрушения лопаток двигателя. Предпочтительно для этого анализа используют параметрическую модель 240. Эта параметрическая модель связана с моделью конструкции жизненно важных частей самолета (205), которая может быть или не быть параметрической моделью, таким образом, чтобы пользователь мог легко определить зазор между траекторией фрагмента лопатки и жизненно важными элементами самолета. Отображение моделирования траектории фрагмента лопатки предпочтительно выводят на экран, чтобы, в случае необходимости, пользователь мог локализовать точку столкновения фрагментов лопатки с конструкцией самолета, а также степень проникновения. Предпочтительно данные, связанные с точкой столкновения и со степенью проникновения, вычисляются автоматически и могут быть экспортированы в виде текста.
Важно также исследовать влияние позиционирования двигателя на шум, ощущаемый людьми в самолете, а также на земле во время фаз взлета и посадки. Для этого можно использовать параметрическую модель 245, содержащую моделирование звуковых излучений, например в виде акустического конуса. Предпочтительно такой акустический конус выводят на экран, чтобы, в случае необходимости, пользователь мог локализовать часть самолета, на которую действует это условие. Данные, связанные с частями самолета, подверженными влиянию этого условия, тоже предпочтительно определяются автоматически и могут быть экспортированы в виде текста.
Точно так же можно использовать параметрическую модель 250, связанную с влиянием положения двигателя на температуры, которые могут испытывать некоторые части самолета. Аналогично можно использовать другую параметрическую модель 255, связанную с влиянием водяных струй от взлетно-посадочных шасси на позиционирование двигателя. Как и звуковые условия, тепловые и гидравлические условия можно визуально отобразить в виде конусов. Предпочтительно отображения тепловых и гидравлических условий выводят на экран, чтобы, в случае необходимости, пользователь мог локализовать часть самолета, подверженную воздействию этого условия. Данные, связанные с частями самолета, подверженными влиянию этих условий, тоже предпочтительно определяются автоматически и могут быть экспортированы в виде текста.
Естественно, в способ помощи в позиционировании двигателя можно добавить другие условия путем создания новых параметрических моделей или путем добавления параметров и/или математических отношений в существующие параметрические модели. Точно так же, группировка условий по параметрическим моделям может быть другой. Например, можно сгруппировать условия, связанные с шумом и с риском разрушения, в одну параметрическую модель. Можно также разделить параметрическую модель, связанную с границами люков и трап-лотков, на две отдельные параметрические модели.
Анализ позиционирования силовой установки является частично иерархическим, при этом некоторые части анализа являются упорядоченными, а другие нет. Например, анализ вспомогательных конструкций может быть осуществлен только после анализа пилона, тогда как анализы акустических, тепловых и гидравлических конусов можно осуществлять в любом порядке или параллельно.
Изучение всех этих условий традиционно осуществляют эксперты в соответствующих технических областях, в случае необходимости получающих помощь от экспертов по геометрии, методологии и вычислениям. Вместе с тем, использование ассоциативных параметрических моделей согласно способу в соответствии с настоящим изобретением позволяет опытному пользователю произвести первый анализ всех этих условий на основании родового моделирования, осуществленного экспертами.
Частный вариант применения способа в соответствии с настоящим изобретением для позиционирования двигателя на крыле самолета использует около тридцати параметрических моделей, включающих от 1000 до 2000 параметров. Естественно, для упрощения каждая модель детально не анализируется. Точно так же, все параметры параметрической модели не рассматриваются последовательно один за другим. Описание представляет лишь общий принцип способа в соответствии с настоящим изобретением и приводит примеры параметрических моделей и примеры параметров параметрических моделей.
Параметрическая модель гондолы позволяет, например, определить:
- внешнюю форму гондолы;
- форму сопла;
- центральное тело сопла;
- капоты двигателя и ось их вращения; и
- реверсоры тяги и ось их вращения.
Эти данные могут быть сохранены в памяти, например, в виде точек и профилей. Предпочтительно эти профили образованы совокупностью точек и касательных в этих точках, позволяющих соединить их кривыми. Каждый профиль соответствует пересечению кривой, отображающей элемент объекта, связанного с моделью, с заранее определенной плоскостью.
Предпочтительно каждая параметрическая модель дополнительно содержит систему координат, позволяющую позиционировать один объект относительно второго. Например, система координат гондолы может быть системой, начало которой находится на оси гондолы на заранее определенном расстоянии от самой передней точки гондолы. Ось Х может быть осью гондолы, ось Y может быть осью, перпендикулярной к оси Х в горизонтальной плоскости, а ось Z может быть осью, перпендикулярной к оси Х в вертикальной плоскости.
Таким образом, профиль гондолы можно определить по плоскости X-Y и по плоскости X-Z. В предпочтительном варианте в плоскости X-Z определяют два профиля - нижний профиль и верхний профиль, при этом, как правило, двигатели самолета не являются симметричными по плоскости X-Y.
Как было указано выше, можно создать несколько моделей одного трехмерного объекта. Например, можно создать параметрическую модель со всеми основными данными гондолы, и в то же время создать другую параметрическая модель со всеми этими основными данными гондолы и дополнительно содержащую формулы вычисления массы и рисков, связанных с позиционированием.
В дальнейшем тексте описания родовой моделью будет считаться параметрическая модель, значения которой не были инициализированы или были инициализированы со значениями по умолчанию. Значения параметров родовой модели могут быть любыми или могут быть заранее определены таким образом, чтобы максимально приближаться к конкретным моделям. Конкретная модель является родовой моделью, по меньшей мере, некоторые значения которой были инициализированы. Конкретная модель является «динамичной» моделью, которая позволяет автоматизировать некоторые задачи или некоторые вычисления и параметры которой могут быть изменены. Конкретная модель динамично связана с другими конкретными моделями, например, чтобы автоматизировать вычисления и обновлять значения, в частности значения размеров. Родовую модель можно рассматривать как скелет конкретной модели. Конкретную модель можно использовать саму по себе в прикладной программе автоматизированного проектирования. Значения конкретной модели можно также использовать для создания других конкретных моделей. Например, значения конкретной модели гондолы можно использовать для реализации родовой модели силовой установки, значения которой, связанные с двигателем, могли или могут быть реализованы согласно этому же методу.
Для реализации родовой модели на основании конкретной модели применяют решение, согласно которому экспортируют данные конкретной модели в виде текста и импортируют их в реализуемую родовую модель. Этот механизм показан на фиг.3. Данные конкретной модели (300) экспортируют (этап 305) в виде текста, например, в виде текстового файла (310). Затем экспортированные данные (310) импортируют (этап 320) в родовую модель, выбранную в базе данных (320), содержащей, по меньшей мере, одну родовую модель, для реализации новой конкретной модели (325). Предпочтительно пользователь может выбирать экспортируемые или импортируемые параметры или профили.
На основании одной или нескольких конкретных моделей можно создать несколько конкретных моделей объекта. Например, конкретную модель гондолы, содержащую моделирование аэродинамического поведения гондолы, можно создать на основании простой конкретной модели гондолы. Точно так же эту конкретную модель гондолы, содержащую аэродинамическое поведение гондолы, можно использовать для создания конкретной модели силовой установки, содержащей гондолу и двигатель.
Использование систем координат параметрических моделей, например гондолы и двигателя, а также параметров, содержащихся в этих моделях, позволяет позиционировать объекты, представленные этими моделями, когда реализованы соответствующие родовые модели, то есть когда этим параметрам приданы значения, позволяющие производить позиционирование. Кроме того, связь между конкретными моделями является динамичной, поэтому, если один параметр позиционирования меняют, происходит динамичная адаптация других моделей.
Применяя это решение, можно разбить на части разработку позиционирования силовой установки, объединяя при этом промежуточные данные таким образом, чтобы можно было подтвердить разработку в целом.
После запуска прикладной программы автоматизированного проектирования пользователь предпочтительно должен выбрать конкретную модель первого объекта, относительно которого необходимо позиционировать второй объект. В этом примере первым объектом является конструкция самолета или часть конструкции самолета, содержащая крылья, с заранее определенной системой координат, позволяющей добавлять элементы в точных положениях. Согласно обычно используемой системе координат нос самолета принимают за начало координат, ось фюзеляжа принимают за ось Х, перпендикуляр к оси Х в плоскости крыльев принимают за ось Y, и нормаль к плоскости, образованной осями Х и Y, - за ось Z. Цифровую модель этого первого объекта или части этого первого объекта выводят на экран.
Если пользователь желает определить первоначальное положение гондолы в соответствии с границами люков и трап-лотков, создают экземпляр параметрической модели, связанной с открываниями и с землей, согласно данным конкретной модели самолета или части самолета. Эта модель, связанная с открываниями и с землей, позволяет определить и вывести на экран граничные поверхности для земли, люков кабины и трап-лотков. Позиционирование элементов, связанных с этой моделью, автоматически происходит во время реализации по элементам отсчета, хранящимся в модели, например, по плоскостям X-Y, Y-Z и Z-X фюзеляжа и касательной к носу фюзеляжа в зависимости от системы координат, связанной с конструкцией самолета. Предпочтительно каждую поверхность отображают разным цветом. Например, светло-зеленый цвет может отображать статичную землю, синий цвет может отображать землю во время посадки при боковом ветре, желтый цвет может отображать землю во время посадки с невыпущенным передним шасси, темно-зеленый цвет может отображать границы трап-лотков, и красный цвет может отображать границы передних люков кабины. Используя редактор параметров параметрической модели, пользователь может определить реальные размеры этих элементов и соответствующие границы. Например, для каждой плоскости, отображающей землю (статичная, посадка при боковом ветре или с невыпущенным передним шасси), пользователь может ввести расстояния между передней точкой приземления и плоскостями X-Y, Y-Z и Z-X, расстояния между главной точкой приземления и плоскостями X-Y, Y-Z и Z-X, угол крена и угол тангажа самолета. После введения или изменения этих значений в помощь пользователю могут быть произведены вычисления некоторых переменных. В частности, могут быть вычислены угол между плоскостью X-Y и статичной землей, расстояние между точками приземления и расстояние между точками приземления по оси Х. Точно так же, что касается люков и трап-лотков, пользователь может ввести или изменить расстояние между плоскостью Y-Z и центром люка, минимальное расстояние между центром люка и передней концевой плоскостью двигателя, относительный угол между трап-лотком и плоскостью Y-Z по оси вращения трап-лотка, ширину трап-лотка и расстояние по оси Y между осью вращения трап-лотка и плоскостью Z-X. Плоскости, отображающие границы люков, трап-лотков и земли, могут быть в любой момент выведены на экран или могут быть в любой момент скрыты, что позволяет пользователю целенаправленно конкретизировать анализ по назначению.
На фиг.4 показан самолет 400, используемая система координат, а также границы, связанные с землей при посадке с невыпущенным передним шасси 405 и с открыванием люков 410. Фиг.4 позволяет пользователю заранее определить возможные зоны позиционирования гондолы или силовой установки в зависимости от выведенных на экран условий. Если гондолу или силовую установку позиционируют на крыле самолета на основании параметров и контрольных элементов отсчета, сохраненных в конкретных моделях самолета или гондолы, отображение, эквивалентное фиг.4, или более точное изображение, такое как вид в разрезе по плоскости X-Z, позволяет определить зазоры между внешними границами, показанными в виде плоскостей или прямых линий, и концами гондолы или силовой установки.
После выведения на экран первого объекта и, в случае необходимости, отображения первого набора условий, пользователь может выбрать конкретную модель второго объекта, то есть в данном примере гондолы. Предпочтительно первоначальное положение этого объекта определяется автоматически по некоторым данным первого объекта и, в случае необходимости, по предварительно исследованным условиям. Определение этого первоначального положения, предпочтительно подтвержденного как правильное, можно реализовать на основании характеристик первого объекта и приблизительного расположения второго объекта, измененного в зависимости от возможных предварительно исследованных условий. В описанном примере первоначальное положение гондолы автоматически определяется по конструкции самолета и, в частности, крыла и, в частности, в зависимости от условий, связанных с землей, люками и трап-лотками. Пользователь может изменить это первоначальное положение, например, по относительным или абсолютным координатам. После определения первоначального положения гондолы на экран выводится ее цифровая модель или цифровая модель ее части.
На фиг.5 показан вид сбоку самолета, на крыле которого позиционировали гондолу. Как показано на этой фигуре, передний конец гондолы 500 находится на некотором расстоянии от граничных плоскостей трап-лотков 410 и люка 515. Таким образом, по отношению к этим двум условиям позиционирование гондолы может считаться подтвержденным. Это же касается плоскостей земли, показанных линиями 405, 505 и 510, отображающими соответственно землю во время посадки с невыпущенным передним шасси, статичную землю и землю во время посадки при боковом ветре.
Используя конкретную модель гондолы и конкретную модель самолета или крыла, содержащую моделирование аэродинамических условий, пользователь может также контролировать аэродинамику, связанную с положением гондолы по отношению к крылу. Этот анализ можно производить, сравнивая положение изобарных поверхностей, связанных с крылом, с положением гондолы. На фиг.6 показаны теоретические граничные поверхности 605 аэродинамических сверхдавлений, связанных с крылом 600. Визуальный анализ показывает, что эти границы сверхдавлений входят в контакт с гондолой 500. В зависимости от характера этих изобарных поверхностей и от точности анализа положение гондолы можно считать подтвержденным или нет. Если положение гондолы считается подтвержденным, может возникнуть необходимость в вычислении ухудшения характеристик, связанного с проникновением изобарной кривой в гондолу. Предпочтительно это вычисление интегрируют в конкретную модель гондолы. Оно может быть также интегрировано в другую параметрическую модель, такую как конкретная модель самолета или крыла. Если положение гондолы не считается подтвержденным, положение гондолы может быть изменено. Как и в предыдущем случае, изменение этого положения можно осуществить при помощи координат гондолы. В этом случае производят пересмотр анализируемых условий и их отображение обновляют.
Точно так же можно использовать конкретные модели самолета и гондолы для подтверждения положения гондолы в зависимости от условий, связанных с реверсом тяги, и от условий, связанных с открыванием капотов двигателя для его технического обслуживания, как показано на фиг.7а и 7b соответственно.
Следует отметить, что предыдущий анализ, осуществленный по геометрическим условиям, основан только на гондоле, однако разработку можно вести по совокупности гондолы и двигателя.
После определения и подтверждения первоначального положения гондолы по отношению к крылу самолета можно анализировать характеристики пилона крепления, то есть соединения между силовой установкой и крылом. Для этого анализа предпочтительно используют отдельную параметрическую модель. Родовую модель силовой установки, содержащую моделирование пилона, реализуют с параметрами гондолы, использованными в предыдущей разработке, а также с параметрами двигателя, выбранного пользователем. В частности, эти параметры включают параметры, связанные собственно с гондолой, а также параметры, связанные с ее позиционированием относительно крыла. При реализации этой модели силовой установки характеристики пилона определяются автоматически по положениям силовой установки и крыла. Предпочтительно на экран выводят каркасный пилон 800, как показано на фиг.8, что позволяет пользователю определить, можно реализовать пилон или нет.
Если пилон не может быть реализован, то есть если положение гондолы не позволяет реализовать пилон, предпочтительно положение гондолы изменяют, даже если положение гондолы подтверждено по отношению к другим условиям. Все ранее анализированные условия опять пересматривают и их отображение обновляют.
Если пилон является реализуемым, можно использовать поверхностную модель пилона для продолжения разработки, в частности с анализом массы и площадей этого пилона. Это дополнительное исследование можно осуществлять на основании одной и той же конкретной модели силовой установки или на основании родовой модели, реализованной с данными конкретной модели, использованной для исследования каркасной модели пилона.
Точно так же для анализа вспомогательных конструкций можно использовать конкретную модель силовой установки, содержащую каркасное или поверхностное моделирование пилона. Однако предпочтительно использовать отдельную модель. Данные конкретной модели силовой установки, содержащей поверхностное моделирование пилона, можно использовать для реализации родовой модели силовой установки, содержащей моделирование вспомогательных конструкций согласно описанному выше способу.
После этого исследования одновременно или предварительно можно анализировать условия, связанные с риском разрушения двигателя. В соответствии с этими условиями необходимо убедиться, в частности, что фрагменты лопаток не могут повредить жизненно важный элемент самолета. Для этого можно использовать конкретную модель двигателя, содержащую моделирование траекторий фрагментов лопаток. Эти траектории можно отобразить, например, в виде конусов. Как и в предыдущем случае, родовую модель реализуют на основании данных, использованных в предыдущих разработках. На фиг.9 показан конус 900 разрушения лопаток турбины таким образом, чтобы в зависимости от конструкции крыла 600 самолета (не показан) можно было определить, могут ли фрагменты лопатки попасть на жизненно важные части самолета.
Точно так же, можно анализировать влияние позиционирования двигателя на шум в самолете или на земле, на температуры, действующие на некоторые части самолета, и влияние водяных струй от взлетно-посадочных шасси на позиционирование двигателя. Предпочтительно эти анализы осуществляют при помощи разных параметрических моделей, при этом каждая модель содержит геометрическое моделирование исследуемого условия. Например, можно использовать несколько звуковых конусов: звуковой конус перед входом камеры сгорания двигателя, звуковой конус за камерой сгорания и звуковой конус за выходом газов. Каждый звуковой конус может быть определен в соответствующей параметрической модели с использованием формы, размера и положения в качестве параметров. Позиционирование звуковых конусов происходит автоматически во время реализации родовой модели двигателя, содержащей это моделирование.
Как было указано ранее, система в соответствии с настоящим изобретением основана на использовании совокупности ассоциативных параметрических моделей, позволяющих установить связь между каждым типом анализа. Таким образом, если изменяют параметр, такой как положение силовой установки по Y, это изменение учитывают во всех параметрических моделях, чтобы пользователь мог быстро подтвердить или не подтвердить это изменение по совокупности условий путем простого визуального анализа влияния этого изменения на выведенные на экран границы и на полученные результаты, в частности связанные с массой и площадями. Например, если силовую установку переместили вперед на несколько сантиметров, пользователь может быстро визуально проверить, соблюдены ли расстояния относительно граничных плоскостей трап-лотков и земли, можно ли реализовать пилон, не слишком ли она тяжелая и так далее по всем условиям. Это динамичное управление позволяет быстро определить положение, удовлетворяющее всем условиям, даже если каждое из условий должно в дальнейшем быть подтверждено путем более глубокого анализа.
Предпочтительно пользователь может свободно выводить на кран или скрывать некоторые виды некоторых условий, представленные плоскостями, кривыми, конусами или любыми другими видами отображения. Точно так же, он может выводить на экран или скрывать аналитические результаты, такие как масса и площади.
В разработку можно также добавлять новые условия, используя просто новую параметрическую модель, связанную с этим условием, и пользуясь при этом ранее выполненным исследованием. Можно также сравнивать несколько положений силовых установок, реализуя несколько аналогичных моделей с разными данными.
Разработка позиционирования силовой установки на крыле самолета является, таким образом, итеративным процессом, согласно которому условия исследуют одно за другим или одновременно в зависимости от характера этих условий и согласно которому изменение параметров позиционирования влечет за собой автоматическое обновление оценки условий и их отображения.
В зависимости от характера и сложности позиционируемых объектом и анализируемых условий моделирование условий можно интегрировать в параметрическую модель объекта, в данном случае крыла, гондолы или двигателя, или включить в независимую модель. Если моделирование некоторых условий интегрировано в одну или несколько независимых параметрических моделей, эти независимые параметрические модели могут содержать часть данных конкретных моделей объектов.
На фиг.10 схематично показаны некоторые этапы примера применения изобретения при помощи прикладной программы автоматизированного проектирования и при помощи прибора, описанного со ссылками на фиг.1. Способ, показанный на фиг.10, позволяет позиционировать первый объект по отношению к второму объекту, например силовую установку по отношению к крылу самолета, в частности в соответствии с упомянутыми выше условиями.
После выбора конкретных параметрических моделей первого и второго объектов (этап 1000), например из библиотеки (1005) на экран, выводят цифровое изображение второго объекта (этап 1010). Определяют первоначальное положение первого объекта (1015). Первоначальное положение первого объекта относительно второго объекта может быть определено пользователем или, предпочтительно, определяется автоматически по некоторым данным конкретной параметрической модели второго объекта. На экран выводят цифровое изображение первого объекта (этап 1020).
Параметрическую модель, содержащую моделирования условия, связанного с положением первого объекта относительно второго объекта, выбирают (этап 1025), например, в библиотеке 1030. Часть данных параметрической модели или параметрических моделей первого и второго объекта можно скопировать в выбранную параметрическую модель, содержащую моделирование условия, что показано пунктирной линией, соединяющей библиотеку 1005 с этапом 1025. Точно так же, часть данных одной или нескольких параметрических моделей, содержащих моделирование ранее исследованных условий, можно скопировать в выбранную параметрическую модель, содержащую моделирование условия. Альтернативно моделирование упомянутого условия может принадлежать к одной из параметрических моделей первого и второго объектов. Поэтому в этом последнем случае нет необходимости выбирать другую параметрическую модель, содержащую моделирование упомянутого условия.
Упомянутое условие оценивают при помощи его моделирования и положения первого и/или второго объекта (этап 1035). В альтернативном варианте упомянутое условие можно оценить при помощи его моделирования и относительного положения первого и второго объектов. Предпочтительно результатом оценки условия является совокупность численных значений или цифровых форм, то есть совокупность точек, кривых, поверхностей и/или объемов. Если результат оценки упомянутого условия выражается в численных значениях, предпочтительно они сохраняются в параметрической модели, содержащей моделирование упомянутого условия. Эти численные значения могут быть выведены на экран и/или экспортированы (что показано пунктирной стрелкой) для использования в другой прикладной программе. Если результатом условия является цифровая форма или совокупность цифровых форм, предпочтительно эти формы выводятся на экран (этап 1040). Выведение на экран этих форм позволяет пользователю визуально подтвердить или нет положение первого объекта по отношению к второму в соответствии с оцененным условием.
После этого осуществляют тест, чтобы определить, собирается ли пользователь подтвердить положение первого объекта относительно второго по другому условию (этап 1045). Если пользователь хочет подтвердить положение первого объекта относительно второго по другому условию, повторяют три предыдущих этапа (этапы 1025-1040). Если нет, осуществляют второй тест, чтобы определить, хочет ли пользователь изменить положение первого объекта по отношению к второму (этап 1050). Если пользователь желает изменить положение первого объекта по отношению к второму, он определяет новое положение первого объекта (этап 1055). Как и в предыдущем случае, положение первого объекта относительно второго объекта можно определить по его координатам или можно определить путем выбора одной или нескольких точек, например при помощи мыши. После этого изображение на экране первого объекта меняют по его новому положению (этап 1060).
Когда положение первого объекта меняется, производят повторную оценку каждого условия в соответствии с моделированием условия и новым положением первого объекта (этап 1065). Изображение результата оценки каждого условия на экране изменяют в зависимости от результатов повторной оценки.
После этого пользователь может опять произвести оценку новых условий (этап 1045) или изменить положение первого объекта (этап 1050).
Естественно, для удовлетворения специфических запросов специалист в области изобретения может вносить изменения в описанные выше варианты.
Изобретение относится к проектированию трехмерных объектов. Техническим результатом является расширение функциональных возможностей за счет оптимизации размещения первого объекта по отношению ко второму объекту в сложной среде. Способ и устройства помощи в относительном позиционировании трехмерных объектов в сложной среде с участием специалистов нескольких профессий согласно совокупности геометрических и/или математических условий, согласно которому для каждого из объектов выбирают параметрическую модель. Выбирают также параметрические модели, содержащие моделирование условий. На экран выводят отображение одного из объектов, позволяющее позиционировать другой объект и вывести на экран этот другой объект. Для каждой параметрической модели, содержащей моделирование условия, получают элемент данных, связанный с положением одного из объектов, для осуществления оценки соответствующего условия. Если один объект добавляют или смещают, то производят повторную оценку относительных положений объектов. 3 н. и 12 з.п. ф-лы, 11 ил.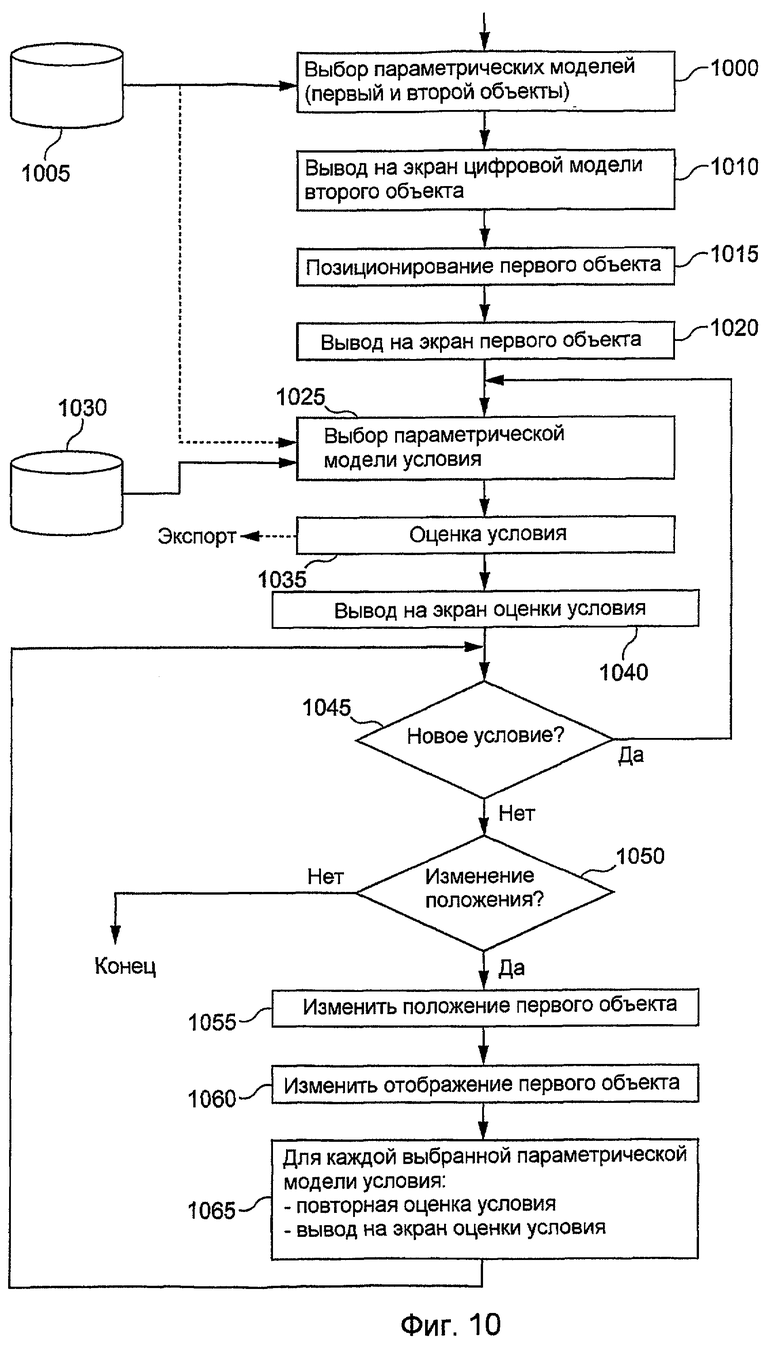
1. Способ помощи в позиционировании первого объекта по отношению к второму объекту согласно, по меньшей мере, одному условию, связанному с относительным положением упомянутых первого и второго объектов, отличающийся тем, что содержит следующие этапы:
- выбор параметрической модели, связанной с каждым из упомянутых первого и второго объектов (1000);
- вывод на экран цифровой модели упомянутого второго объекта согласно упомянутой параметрической модели, связанной с упомянутым вторым объектом (1010);
- позиционирование упомянутого первого объекта относительно упомянутого второго объекта по параметрам упомянутых параметрических моделей, связанных с упомянутыми первым и вторым объектами (1015);
- вывод на экран цифровой модели (500) упомянутого первого объекта согласно упомянутой параметрической модели, связанной с упомянутым первым объектом, и согласно упомянутому позиционированию (1020);
- выбор, по меньшей мере, одной параметрической модели, содержащей моделирование упомянутого, по меньшей мере, одного условия (1025);
- для упомянутой, по меньшей мере, одной параметрической модели, содержащей моделирование упомянутого, по меньшей мере, одного условия:
- получение, по меньшей мере, одного элемента данных, связанного с положением, по меньшей мере, одного из упомянутых первого и второго объектов;
- оценка упомянутого, по меньшей мере, одного условия по упомянутому, по меньшей мере, одному элементу данных (1035).
2. Способ по п.1, отличающийся тем, что дополнительно содержит этап изменения, по меньшей мере, одного параметра, по меньшей мере, одной из упомянутых параметрических моделей, связанных с упомянутыми первым и вторым объектами (1050), при этом упомянутые этапы
- получения, по меньшей мере, одного элемента данных, связанного с положением, по меньшей мере, одного из упомянутых первого и второго объектов; и
- оценки упомянутого, по меньшей мере, одного условия по упомянутому, по меньшей мере, одному элементу данных
выполняют повторно (1065) для упомянутой, по меньшей мере, одной параметрической модели, содержащей моделирование упомянутого, по меньшей мере, одного условия, после упомянутого изменения упомянутого, по меньшей мере, одного параметра.
3. Способ по п.1 или 2, отличающийся тем, что дополнительно содержит этап вывода на экран результата упомянутой оценки упомянутого, по меньшей мере, одного условия.
4. Способ по п.3, отличающийся тем, что упомянутый этап вывода на экран содержит этап вывода на экран графической индикации, связанной с упомянутым, по меньшей мере, одним условием, таким образом, чтобы визуальный анализ положения упомянутой графической индикации относительно, по меньшей мере, одной из цифровых моделей, связанных с упомянутыми первым и вторым объектами, позволил подтвердить положение упомянутого первого объекта согласно упомянутому, по меньшей мере, одному условию.
5. Способ по п.3, отличающийся тем, что упомянутый этап вывода на экран результата упомянутой оценки упомянутого, по меньшей мере, одного условия содержит этап вывода на экран, по меньшей мере, одного значения, при этом упомянутое значение позволяет подтвердить положение упомянутого первого объекта согласно упомянутому, по меньшей мере, одному условию.
6. Способ по п.4, отличающийся тем, что упомянутый этап вывода на экран результата упомянутой оценки упомянутого, по меньшей мере, одного условия содержит этап вывода на экран, по меньшей мере, одного значения, при этом упомянутое значение позволяет подтвердить положение упомянутого первого объекта согласно упомянутому, по меньшей мере, одному условию.
7. Способ по п.1, отличающийся тем, что упомянутая, по меньшей мере, одна параметрическая модель, содержащая моделирование упомянутого, по меньшей мере, одного условия, включена в одну из упомянутых параметрических моделей, связанных с упомянутыми первым и вторым объектами.
8. Способ по любому из пп.1, 2, 4, 5, 6, отличающийся тем, что, по меньшей мере, один элемент данных упомянутой, по меньшей мере, одной параметрической модели, содержащей моделирование упомянутого, по меньшей мере, одного условия, импортируют (315) из одной из упомянутых параметрических моделей, связанных с упомянутыми первым и вторым объектами.
9. Способ по п.3, отличающийся тем, что, по меньшей мере, один элемент данных упомянутой, по меньшей мере, одной параметрической модели, содержащей моделирование упомянутого, по меньшей мере, одного условия, импортируют (315) из одной из упомянутых параметрических моделей, связанных с упомянутыми первым и вторым объектами.
10. Способ по п.1, отличающийся тем, что упомянутый второй объект содержит, по меньшей мере, часть летательного аппарата.
11. Способ по п.10, отличающийся тем, что упомянутое, по меньшей мере, одно условие связано, по меньшей мере, с одним из следующих положений: положение люков, положение трап-лотков, положение земли, относительное положение земли во время посадки при боковом ветре и относительное положение земли во время посадки с невыпущенным передним шасси.
12. Способ по п.1, отличающийся тем, что упомянутый первый объект содержит, по меньшей мере, часть силовой установки летательного аппарата.
13. Способ по п.12, отличающийся тем, что упомянутое, по меньшей мере, одно условие связано с аэродинамикой, по меньшей мере, части упомянутого первого объекта, с подвижными деталями, по меньшей мере, части упомянутого первого объекта, с риском разрушения, по меньшей мере, части упомянутого первого объекта или с шумом или с теплом, которые может излучать, по меньшей мере, часть упомянутого первого объекта.
14. Устройство, содержащее средства, выполненные с возможностью осуществления каждого из этапов способа по любому из пп.1-13.
15. Средство хранения информации, считываемое компьютером, содержащее компьютерную программу, содержащую команды, предназначенные для осуществления каждого из этапов способа по любому из пп.1-13.
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| US 20050063251 A1, 24.03.2005 | |||
| Устройство для нанесения покрытий методом погружения | 1987 |
|
SU1475726A1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ СТРУКТУРЫ УЗЛОВ, ПРЕДНАЗНАЧЕННЫХ ДЛЯ ПРЕДСТАВЛЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ИЗОБРАЖЕНИЙ С ГЛУБИНОЙ | 2002 |
|
RU2237284C2 |

