Способ управления положением солнечной батареи (СБ) относится к космической технике, а именно к системам электроснабжения космических аппаратов (КА), и может быть применен при управлении положением СБ спутников, орбитальных станций и других КА.
Современные КА могут функционировать на орбите Земли несколько лет, при этом в течение всего этого времени требуется обеспечивать их бортовые системы электроэнергией. Как правило, электроснабжение бортовых систем КА осуществляется при помощи солнечных батарей. Величина тока, вырабатываемого СБ, зависит от ориентации плоскости ее рабочей поверхности относительно Солнца.
В процессе полета КА для обеспечения тока, достаточного для функционирования его бортовых систем, требуется периодически ориентировать СБ относительно направления на Солнце. Для эффективного управления положением СБ используют бортовые автоматические системы управления (БАСУ), которые управляют устройствами поворота СБ, выполненными на базе электромеханических приводов (ЭМП) с закрепленными на их выходном валу датчиками. В состав БАСУ входят бортовые вычислительные машины, в которых реализуются алгоритмы управления системы управления движением (СУД) и алгоритмы управления положением СБ. Алгоритмы СУД осуществляют прием, обработку информации от датчиков, определяющих направление на Солнце относительно корпуса КА, и формируют заданный угол поворота СБ. Алгоритмы управления положением СБ по информации от датчиков, установленных на выходном валу ЭМП СБ, определяют текущее угловое положение СБ относительно корпуса КА, осуществляют сравнение с заданным углом поворота и формируют команды на вращение и прекращение вращения СБ для уменьшения рассогласования между ними. Как правило, для измерения текущего углового положения СБ, используют датчик угла, выполненный в виде круга 360°, разбитого на равные дискретные угловые сектора, каждому из которых соответствует определенный код.
Наиболее близким техническим решением является способ управления положением СБ, заключающийся в том, что определяют установившуюся угловую скорость СБ, разбивают датчик угла с кругом 360° на равные дискретные сектора, определяют угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат, вычисляют расчетный угол СБ как произведение угловой скорости на время ее вращения, определяют угол разгона как величину изменения углового положения нормали от момента выдачи команды на вращение до момента достижения установившейся угловой скорости, определяют угол торможения как величину изменения углового положения упомянутой нормали от момента выдачи команды на прекращение вращения до полного прекращения вращения, принимают угол разгона равным углу торможения, задают порог срабатывания, при достижении которого формируется рассогласование между заданным и расчетным углами, задают порог отпускания, при достижении которого прекращается рассогласование между заданным и расчетным углами СБ, менее порога срабатывания, осуществляют вращение СБ в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами [1].
Недостатком известного способа управления является необходимость постоянного измерения фактического углового положения СБ для корректировки ее расчетного углового положения в моменты изменения показаний датчика угла на величину одного дискретного сектора. При частичных отказах датчика угла, либо при нарушениях в линиях связи полученная в результате измерения информация углового положения СБ, передаваемая от датчика угла в БАСУ, может не соответствовать фактическому угловому положению СБ, то есть формироваться с ошибкой.
В случае корректировки расчетного угла по указанному ошибочному значению происходит неправильная ориентация СБ относительно Солнца и, как следствие, снижение формируемого ею тока. Ошибочная информация об угловом положении СБ может возникать по следующим причинам:
- при отказах части измерительных или выходных элементов датчика угла СБ;
- при обрывах или коротких замыканиях части линий связи между датчиком угла и БАСУ;
- при отказах части приемных элементов в БАСУ.
Технической задачей предлагаемого изобретения является повышение надежности и живучести системы управления СБ путем сохранения правильной ориентации рабочей поверхности СБ относительно Солнца в случае отказов, обусловленных ошибочными значениями измеренных угловых положений СБ.
Указанный технический результат достигается тем, что в известном способе управления положением СБ КА, заключающемся в том, что определяют установившуюся угловую скорость СБ, разбивают датчик угла с кругом 360° на равные дискретные сектора, определяют угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат, вычисляют расчетный угол СБ как произведение угловой скорости на время ее вращения, определяют угол разгона как величину изменения углового положения нормали от момента выдачи команды на вращение до момента достижения установившейся угловой скорости, определяют угол торможения как величину изменения углового положения упомянутой нормали от момента выдачи команды на прекращение вращения до полного прекращения вращения, принимают угол разгона равным углу торможения, задают порог срабатывания, при достижении которого формируется рассогласование между заданным и расчетным углами, задают порог отпускания, при достижении которого прекращается рассогласование между заданным и расчетным углами СБ, менее порога срабатывания, осуществляют вращение СБ в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами, дополнительно принимают установившуюся угловую скорость СБ в качестве расчетной, превышающей на порядок и более угловую скорость вращения КА вокруг Земли, задают максимальное отклонение расчетной угловой скорости от фактической на порядок и менее угловой скорости вращения СБ, принимают порог отпускания равным углу торможения, за начальное угловое положение нормали к рабочей поверхности СБ принимают угол, при котором положение указанной нормали совпадает с угловым положением биссектрисы начального дискретного сектора датчика угла, причем биссектрисе нулевого сектора датчика угла соответствует нулевое угловое положение вышеуказанной проекции единичного вектора, каждому дискретному сектору датчика угла присваивают произвольный код, не связанный с угловым положением СБ, задают дискретный сектор датчика угла более удвоенной суммы углов разгона и торможения, при этом максимальная суммарная угловая величина последовательно расположенных дискретных секторов с одинаковыми значениями σMAX не должна превышать величины
 ,
,
где ωСБ - расчетная угловая скорость вращения СБ,
ΔωСБ - максимальное отклонение расчетной угловой скорости от фактической,
σ - величина дискретного сектора датчика угла,
задают шаг изменения заданного угла, кратный величине дискретного сектора датчика угла, при этом
 ,
,
где αотп - порог отпускания,
αш - шаг изменения заданного угла,
IMIN - задаваемый минимально допустимый ток,
IMAX - максимально возможный ток,
задают порог срабатывания не более половины шага изменения заданного угла, устанавливают СБ в положение, при котором нормаль к ее рабочей поверхности совпадает с угловым положением биссектрисы одного из дискретных секторов датчика угла, при этом расчетному углу задают значение, соответствующее положению этой нормали, вычисляют заданный угол, как угловую величину целого числа шагов в угловом положении единичного вектора направления на Солнце относительно связанных с КА осей координат, в момент достижения порога отпускания прекращают вычисление расчетного угла и увеличивают его на величину угла торможения при вращении СБ в направлении увеличения расчетного угла или уменьшают на эту же величину при вращении в противоположном направлении, при этом в случае изменения значения датчика угла в момент пересечения границы дискретных секторов расчетному углу присваивают угловое значение целого числа дискретных секторов датчика угла, содержащихся в расчетном угле, увеличенное на половину сектора, задают пороговое значение времени контроля более отношения максимальной суммарной угловой величины последовательно расположенных дискретных секторов, которым соответствуют одинаковые фиксированные значения датчика угла, к разности между расчетной угловой скоростью и максимальным отклонением расчетной угловой скорости от фактической, и менее отношения дискретного сектора датчика угла к удвоенной величине максимально возможного отклонения расчетной угловой скорости СБ от фактической, во время вращения СБ осуществляют отсчет времени коррекции расчетного угла, обнуляют время коррекции перед началом управления, при смене направления вращения, а также в момент изменения значений датчика угла, формируют сигнал отказа, если время коррекции расчетного угла достигает или превышает пороговое значение времени контроля.
На фиг.1 представлено положение КА на орбите Земли, на фиг.2 - круг вращения СБ, разбитый на дискретные сектора, на фиг.3 - графики изменения во времени формируемого СБ тока, а также заданного, расчетного, фактического углов СБ и углового положения проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат.
Способ управления положением солнечной батареи космического аппарата при частичных отказах датчика угла реализуется в три этапа:
- этап подготовки к управлению СБ;
- этап начальной установки СБ;
- этап управления СБ.
На этапе подготовки к управлению СБ определяют максимально возможный ток IMAX, который может формировать СБ при полете КА по заданной орбите и заданной ориентации КА, а также величину минимального тока IMIN, достаточного для электроснабжения бортовых систем, который должна вырабатывать СБ. Известно, что с достаточной степенью точности ток, формируемый СБ, можно определить как величину отклонения текущего углового положения СБ, соответствующего угловому положению нормали к рабочей поверхности СБ, от заданного углового положения СБ, соответствующего угловому положению проекции единичного вектора направления на Солнце на плоскость вращения этой нормали. Таким образом, ток IСБ, формируемый СБ, с достаточной степенью точности определяется уравнением:

где IMAX - максимально возможный ток, формируемый СБ при полете КА по заданной орбите и заданной ориентации КА;
αФ - фактическое угловое положение СБ относительно связанных с КА осей координат;
αЗАД - заданный угол СБ относительно связанных с КА осей координат.
Величина минимально допустимого тока СБ ограничивается, как правило, требованиями к обеспечению бортовых систем КА электроэнергией. В связи с этим величина максимально допустимого углового отклонения αMAX нормали к рабочей поверхности СБ от заданного направления, учитывая уравнение (1), определяется неравенством:

где IMIN - задаваемый минимально допустимый ток.
Управление положением СБ осуществляют по алгоритмам, заложенным в БАСУ, которые определяют величину угла рассогласования между заданным и расчетным угловым положением СБ. При наличии указанного рассогласования алгоритмы формируют команды на вращение СБ по или против часовой стрелки, а при отсутствии рассогласования - на прекращение ее вращения. Заданный угол определяется алгоритмами СУД. Команды управления, формируемые БАСУ, поступают в устройство поворота СБ. Информация об угловом положении СБ поступает от датчика угла СБ в БАСУ в виде кодов.
В наземных условиях, по паспортным данным на ЭМП СБ, входящего в состав устройства поворота СБ, а также по результатам эксперимента на стендах реального оборудования, определяют установившуюся угловую скорость вращения выходного вала ЭМП, которую принимают в качестве расчетной угловой скорости СБ. Кроме того, по паспортным данным на ЭМП определяют величину максимального отклонения фактической угловой скорости СБ от расчетной, а также углы разгона и торможения.
В составе системы управления положением СБ используют ЭМП с расчетной угловой скоростью вращения СБ, на порядок и более превышающей угловую скорость вращения КА вокруг Земли:

где ωСБ - расчетная угловая скорость вращения СБ;
ωО - орбитальная угловая скорость вращения КА вокруг Земли.
Кроме того, выбирают ЭМП с величиной максимального отклонения фактической угловой скорости СБ на порядок и менее от расчетной угловой скорости, то есть:

где ΔωСБ - максимальное отклонение фактической угловой скорости СБ от расчетной.
Принимают, что увеличение фактической угловой скорости СБ от нулевого до расчетного, то есть до установившегося значения, после выдачи команды на вращение СБ осуществляется линейно и равномерно, при этом угол разгона СБ можно определить, как площадь треугольника:

где αРАЗГ - угол разгона СБ;
tHP - момент начала разгона СБ;
tOP - момент окончания разгона СБ.
Аналогично принимают, что уменьшение угловой скорости от расчетного, то есть установившегося, до нулевого значения после выдачи команды на прекращение вращения СБ осуществляется также линейно и равномерно, при этом угол торможения СБ можно определить, как площадь треугольника:

где αТОРМ - угол торможения СБ;
tHT - момент начала торможения СБ;
tOT - момент окончания торможения СБ.
Кроме того, на этапе подготовки к управлению СБ задают порог срабатывания αСР, при достижении которого формируется рассогласование между заданным αЗАД и расчетным αСБ углами СБ, а также порог отпускания αОТП менее порога срабатывания αСР, при достижении которого прекращается рассогласование между заданным и расчетным углами СБ. Принимают углы разгона αРАЗГ, торможения αТОРМ и порог отпускания αОТП равными величинами. Для определения углового положения нормали к рабочей поверхности СБ относительно связанных с КА осей координат используют датчик угла, установленный на валу ЭМП СБ, измеряющий угловое положение СБ с точностью до углового сектора. Датчик угла представляет собой круг 360°, разбитый на равные дискретные угловые сектора, величина одного дискретного сектора датчика угла составляет величину:
где σ - величина дискретного сектора датчика угла;
n - количество дискретных секторов датчика угла.
При этом величина дискретного сектора датчика угла должна быть в диапазоне:

где αРАЗГ - угол разгона СБ;
αТОРМ - угол торможения СБ.
Как правило, величина дискретного сектора датчика угла для различных типов датчиков может изменяться в диапазоне 6°≤σ≤90°.
Датчик угла устанавливают и закрепляют на выходном валу ЭМП таким образом, чтобы биссектриса его начального дискретного сектора совпадала с начальным угловым положением нормали к рабочей поверхности СБ относительно связанных с КА осей координат. При этом биссектрисе нулевого сектора датчика угла должно соответствовать нулевое угловое значение положения проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ. Каждому дискретному сектору датчика угла ставят в соответствие произвольный код, который формируется датчиком угла.
Максимальная суммарная угловая величина последовательно расположенных дискретных секторов датчика угла с одинаковыми значениями формируемых ими кодов от номера i до номера j не должна превышать величины:

где ΣMAX - максимальная суммарная угловая величина последовательно расположенных дискретных секторов датчика угла, которым соответствуют одинаковые значения;
i, j - номера секторов.
Задают шаг изменения заданного угла в диапазоне:

где αШ - шаг изменения заданного угла;
αОТП - порог отпускания;
IMIN - задаваемый минимально допустимый ток;
IMAX - максимально возможный ток.
При этом шаг изменения заданного угла должен быть кратным дискретному сектору датчика угла, то есть:

где k - коэффициент кратности, целое число, более 0.
Задают порог срабатывания αСР в диапазоне:
Устанавливают пороговое значение времени контроля в диапазоне:

где tПОР - пороговое значение времени контроля.
На этапе начальной установки ориентируют СБ таким образом, чтобы нормаль к ее рабочей поверхности совпадала с угловым положением биссектрисы начального дискретного сектора датчика угла. После ориентации расчетному углу СБ задают угловое значение, соответствующее начальному положению нормали:

где αСБ - расчетный угол СБ;
αНСБ - начальное положение нормали к рабочей поверхности СБ.
На этапе управления СБ, например, при помощи астродатчиков по алгоритмам СУД определяют угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат, затем вычисляют заданный угол, как произведение шага изменения заданного угла и округленного в сторону увеличения до целой величины отношения углового положения указанного единичного вектора к величине шага изменения заданного угла, то есть:
где αЗАД - заданный угол СБ относительно связанных с КА осей координат;
αНС - угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат.
В процессе управления БАСУ формирует соответствующую команду на вращение в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами СБ в случае рассогласования между ними более порога срабатывания, то есть при:

где αЗАД - заданный угол;
αСР - порог срабатывания.
Во время вращения осуществляется вычисление расчетного угла СБ αСБ, как произведения ее расчетной угловой скорости вращения ωСБ на время вращения, то есть:

где t - время вращения СБ.
Кроме того, во время вращения контролируют момент достижения рассогласования между расчетным и заданным углами СБ порога отпускания, в момент достижения которого формируют команду на прекращение вращения СБ. После этого осуществляется плавное уменьшение угловой скорости вращения СБ от расчетного до нулевого значения. СБ разворачивается при этом на угол торможения, равный углу отпускания, то есть:

где αТОРМ - угол торможения.
В момент достижения указанными углами порога отпускания прекращают вычисление расчетного угла СБ и увеличивают его на величину угла торможения при вращении СБ в направлении увеличения расчетного угла, то есть:

при этом если (αСБО+αТОРМ)≥360°, то αСБ=(αСБО+αТОРМ-360°),
где αСБО - значение расчетного углового положения СБ на момент достижения порога отпускания.
При вращении СБ в противоположном направлении уменьшают расчетный угол на величину угла торможения, то есть:

при этом если (αСБО+αТОРМ)<0°, то αСБО=(αСБО-αТОРМ+360°).
Если в момент пересечения границы между дискретными секторами датчика угла его значения изменяются, расчетному углу СБ αСБ присваивают угловое значение угла коррекции, вычисляемого, как сумма половины дискретного сектора датчика угла и произведения дискретного сектора датчика угла σ на округленное до целой величины в сторону увеличения отношение текущего углового положения СБ αСБТ к дискретному сектору датчика угла σ, то есть:

Во время вращения СБ осуществляют отсчет времени коррекции расчетного угла. Обнуляют время коррекции перед началом управления, при смене направления вращения, а также в момент изменения значений датчика угла. Формируют сигнал отказа, если время коррекции расчетного угла достигает или превышает пороговое значение времени контроля tПОР (13), то есть при:

где tК - текущее значение времени коррекции.
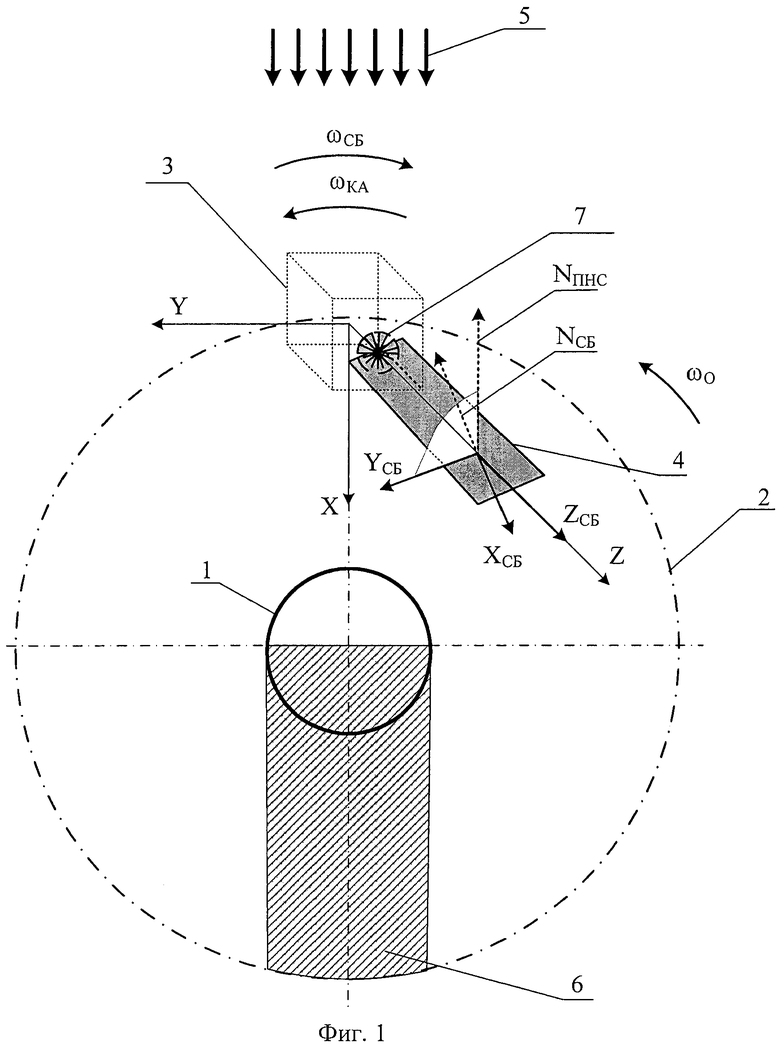
На фиг.1 представлено положение космического аппарата на орбите Земли, где:
1 - Земля;
2 - круговая орбита КА;
3 - корпус КА (условное изображение);
4 - панель СБ;
5 - излучение от Солнца;
6 - теневой участок орбиты;
7 - датчик угла с дискретными секторами;
NПНС - проекция единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат;
NСБ - нормаль к рабочей поверхности СБ;
X, Y, Z - связанные с КА оси координат:
X - ось КА по каналу рыскания (на фиг.1 развернута на 180° относительно направления на Солнце и направлена к центру Земли),
Y - ось КА по каналу крена,
Z - ось КА по каналу тангажа;
XСБ, YСБ, ZСБ - связанные с СБ оси координат:
XСБ - ось СБ по каналу рыскания (на фиг.1 развернута на 180° относительно направления на Солнце и направлена к центру Земли),
YСБ - ось СБ по каналу крена,
ZСБ - ось СБ по каналу тангажа;
ωО - орбитальная угловая скорость вращения КА вокруг Земли;
ωКА - угловая скорость вращения КА вокруг оси Z,
ωСБ - расчетная угловая скорость вращения СБ.
КА вращается вокруг Земли 1 по стационарной орбите 2 с орбитальной угловой скоростью вращения ωO. Ось Y направлена по касательной к орбите 2, при этом КА вращается относительно оси Z с угловой скоростью ωКА, равной орбитальной ωO. При помощи средств управления движением КА осуществляется ориентация оси Х по направлению к центру Земли 1. Направление излучения Солнца 5, относительно связанных с КА осей координат (X, Y, Z), постоянно изменяется, при этом с помощью алгоритмов СУД используя, например, информацию от астродатчиков, либо солнечных датчиков, определяют угловое положение проекции единичного вектора на Солнце NПНС на плоскость вращения нормали NСБ к рабочей поверхности СБ. Положениям нормали к рабочей поверхности СБ NСБ относительно оси Х соответствует фактическое угловое значение, которое определяется с точностью до дискретного сектора датчика угла 7. При достижении угла рассогласования между расчетным и заданным углами более порога срабатывания СБ 4 начинает вращаться относительно корпуса 3 КА вокруг оси ZСБ связанных с ней осей координат, параллельной оси Z КА до достижения порога отпускания. Во время полета по орбите 2 КА периодически попадает в теневой участок орбиты 6, в котором ток, вырабатываемый СБ, имеет нулевое значение.
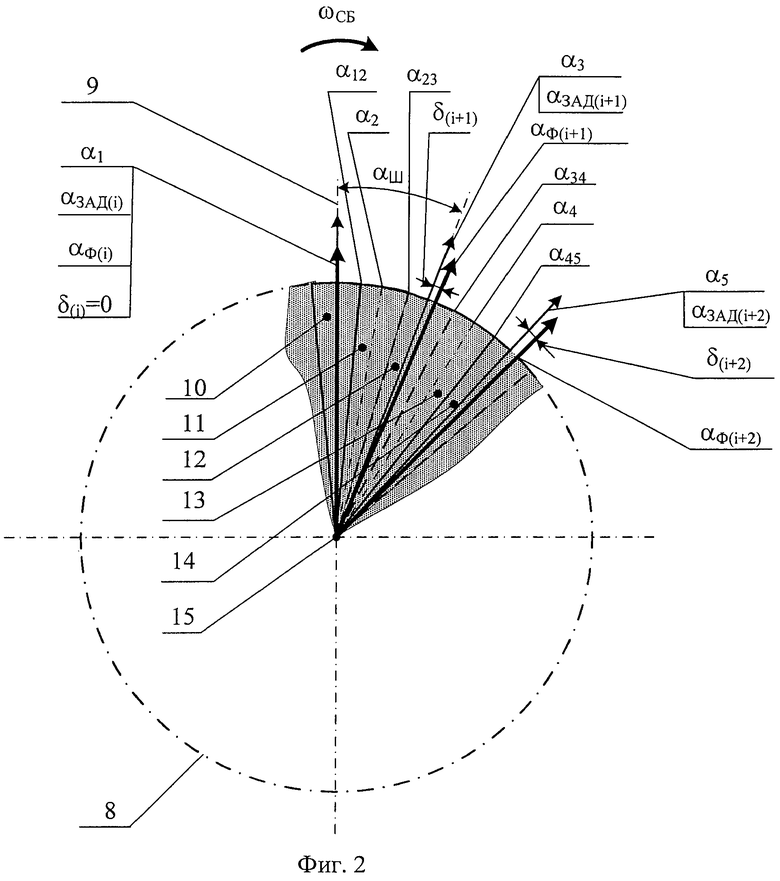
На фиг.2 представлен круг вращения СБ, разбитый на дискретные сектора, где:
8 - круг вращения нормали NСБ к рабочей поверхности СБ;
9 - середина начального дискретного сектора датчика угла, соответствующая начальному угловому значению заданного угла;
10, 11, 12, 13, 14 - дискретные сектора датчика угла;
15 - центр круга 8;
α1, α2, α3, α4, α5 - угловые положения биссектрис соответствующих дискретных секторов 10, 11, 12, 13, 14 датчика угла;
α12, α23, α34, α45 - угловые положения границ дискретных секторов датчика угла;
(i), (i+1), (i+2) - номера шагов изменения заданного угла;
αЗАД(i), αЗАД(i+1), αЗАД(i+2) - заданные угловые положения СБ на соответствующих шагах изменения заданного угла;
αФ(i), αФ(i+1), αФ(i+2) - фактические угловые положения СБ на соответствующих шагах изменения заданного угла;
δi, δi+1, δi+2 - углы рассогласования между заданным αЗАД и фактическим αФ угловым положением СБ на (i), (i+1), (i+2) шагах изменения заданного угла;
σ - величина дискретного сектора датчика угла;
ωСБ - расчетная угловая скорость вращения СБ;
αШ - шаг изменения заданного угла.
Круг вращения СБ 8 разбит на n равных дискретных секторов величиной σ. Каждому из них соответствует произвольное значение кода, формируемое датчиком угла. Во время полета КА по орбите СБ периодически вращается с угловой скоростью ωСБ, направленной по часовой стрелке относительно центра 15 круга вращения 8, при этом датчик угла формирует коды, соответствующие дискретным секторам датчика угла в зависимости от угловых положений СБ, причем каждому дискретному сектору датчика угла присваивают произвольный код, не связанный с угловым положением СБ.
Положение проекции единичного вектора направления на Солнце (NПНС, фиг.1) относительно связанных с КА осей координат изменяется непрерывно, при этом соответствующие заданные углы αЗАД(i), αЗАД(i+1), αЗАД(i+2) изменяются дискретно, на величину шага изменения заданного угла αШ, кратного величине углового сектора датчика угла σ. Вращение СБ начинается в моменты достижения рассогласования между заданным и расчетным углами СБ величины не менее шага изменения заданного угла αШ.
В рассматриваемом случае шаг изменения заданного угла αШ равен удвоенной величине углового сектора, то есть αШ=2·σ. На шагах (i), (i+1), (i+2) заданные углы принимают значения αЗАД(i), αЗАД(i+1), αЗАД(i+2), совпадающие с угловыми значениями α1, α3, α5, биссектрис соответствующих секторов 10, 12 и 14 датчика угла.
Начальный заданный угол αЗАД(i) на i-том шаге изменения заданного угла совпадает с биссектрисой начального дискретного сектора 10 датчика угла, имеющего угловое значение α1, и с начальным фактическим угловым положением СБ αФ(i), то есть αЗАД(i)=α1=αФ(i), при этом угловое рассогласование между заданным углом и фактическим угловым положением СБ отсутствует, то есть δi=0.
В приведенном примере коды, формируемые датчиком угла, соответствующие секторам 11, 12, 13, совпадают между собой и отличаются от значений кодов, соответствующих секторам 10 и 14. Таким образом, во время вращения СБ коды, формируемые датчиком угла, изменяются на границах секторов 10 и 11, а также 13 и 14, соответствующих угловым положениям α12 и α45, а на границах секторов, соответствующих угловым положениям α23, α34, указанные коды остаются неизменными.
В момент изменения заданного угла на величину шага изменения заданного угла, то есть при αЗАД(i+1)=(αЗАД(i)+αШ), рассогласование между заданным и расчетным углами достигает порога срабатывания и СБ 8 из положения αФ(i) начинает вращаться с угловой скоростью ωСБ до достижения фактического положения αФ(i+1) с рассогласованием по отношению к заданному углу δ(i+1)=|αФ(i+1)-αЗАД(i+1)|.
В момент изменения заданного угла на величину нового шага изменения заданного угла, то есть при αЗАД(i+2)=(αЗАД(i+1)+αШ), рассогласование между заданным и расчетным углами вновь достигает порога срабатывания и СБ 8 из положения αФ(i+1) начинает вращаться с угловой скоростью ωСБ до достижения положения αФ(i+2) с рассогласованием по отношению к заданному углу δ(i+2)=|αФ(i+2)-αЗАД(i+2)|.
Во время вращения СБ вычисляют расчетный угол, как произведение расчетной угловой скорости на время вращения, а также, при любых изменениях кодов датчика угла: в приведенном примере на границах секторов 10 и 11, а также секторов 13 и 14, соответствующих угловым положениям α12 и α45, осуществляется коррекция расчетного угла, которому присваивают угловое значение целого числа дискретных секторов датчика угла, содержащихся в расчетном угле, увеличенное на половину сектора (см. формулу 21).
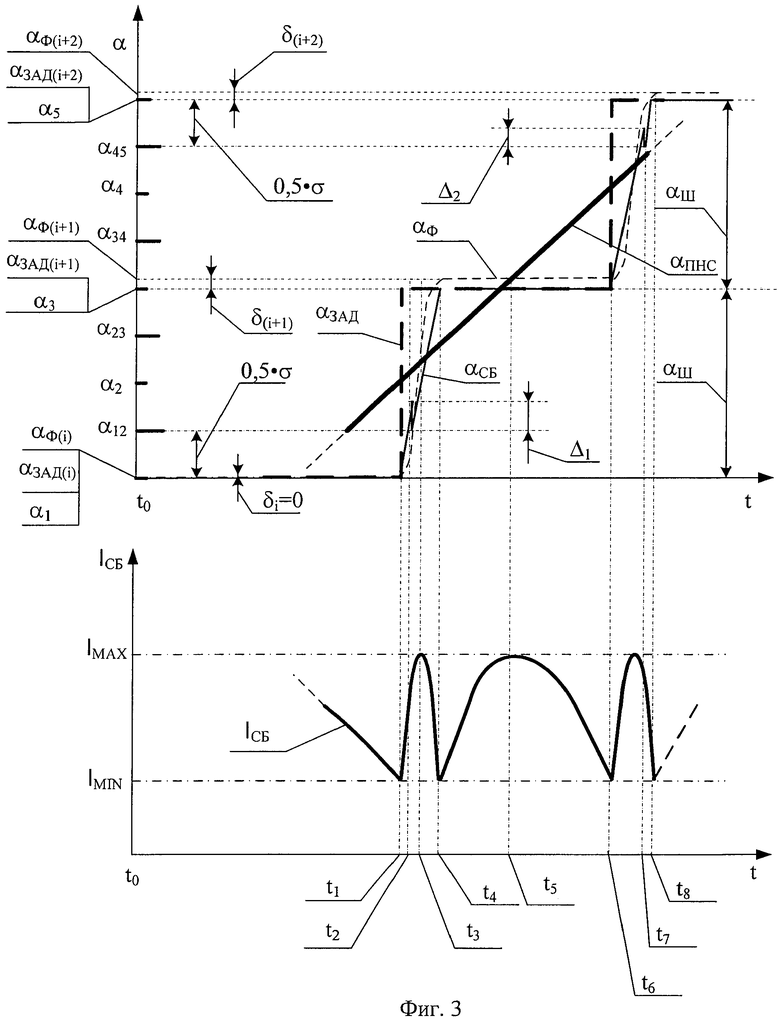
На фиг.3 представлены графики изменения во времени углового положения проекции единичного вектора направления на Солнце, заданного, расчетного и фактического углового положения СБ, а также формируемого ею тока, где:
αПНС - угловое положение проекции единичного вектора направления на Солнце относительно связанных с КА осей координат;
αЗАД - заданный угол СБ относительно связанных с КА осей координат;
αСБ - расчетный угол СБ;
αФ - фактическое угловое положение СБ относительно связанных с КА осей координат;
IСБ - ток, формируемый СБ;
IMIN - задаваемый минимально допустимый ток, формируемый СБ;
IMAX - максимально возможный ток, формируемый СБ;
α1, α2, α3, α4, α5 - угловые положения биссектрис соответствующих дискретных секторов 10, 11, 12, 13, 14 датчика угла;
α12, α23, α34, α45 - угловые положения границ дискретных секторов датчика угла;
(i), (i+1), (i+2) - номера шагов изменения заданного угла;
αЗАД(i), αЗАД(i+1), αЗАД(i+2) - заданные угловые положения СБ на соответствующих шагах изменения заданного угла;
α(i), α(i+1), α(i+2) - фактические угловые положения СБ на соответствующих шагах изменения заданного угла;
δi, δi+1, δi+2 - углы рассогласования между расчетным и фактическим угловым положением СБ на соответствующих шагах изменения заданного угла;
σ - угловая величина дискретного сектора датчика угла;
αШ - шаг изменения заданного угла;
Δ1, Δ2 - углы, на которые корректируются расчетные угловые положения СБ;
t1-t8 - моменты изменения состояний СБ:
t1, t6 - моменты начала вращения СБ при рассогласовании;
t4, t8 - моменты окончания вращения СБ при прекращении рассогласования;
t2, t7 - моменты коррекции расчетного угла;
t3, t5, t7 - моменты формирования максимального значения тока СБ.
На графике представлено линейное изменение углового положения проекции единичного вектора направления на Солнце относительно связанных с КА осей координат αПНС, при этом заданный угол αЗАД изменяется дискретно на угловые величины, равные шагу изменения заданного угла αШ, который соответствует удвоенной величине дискретного сектора датчика угла, то есть αШ=2·σ. Таким образом, заданный угол αЗАД принимает значения, соответствующие положениям биссектрис секторов круга вращения СБ α1, α3, α5. В диапазоне времени t0<t≤t1 рассогласование между фактическим и заданным углами СБ отсутствует, то есть δ(i)=|αЗАД(i)-αФ(i)|=0.
В момент времени t1, после достижения рассогласования между заданным αЗАД и расчетным αСБ углами СБ на величину шага изменения заданного угла αШ, СБ начинает вращение от углового значения αФ(i). Расчетная угловая скорость СБ может отличаться от фактической на величину не более максимального отклонения фактической угловой скорости СБ от расчетной (см. формулу 4), из-за чего к моменту t2 пересечения границы секторов α12, рассогласование между расчетным и фактическим углами СБ достигает величины Δ1. В момент t2 пересечения границы секторов α12 происходит изменение значения датчика угла, при этом расчетному углу СБ присваивают угловое значение, вычисленное в соответствии с формулой (21).
Далее, в момент времени t3 происходит совпадение фактического положения нормали к рабочей поверхности СБ с направлением на Солнце, то есть αФ=αПНС, при этом ток, формируемый СБ IСБ, достигает максимально возможного значения, то есть IСБ=IMAX. Вращение СБ продолжается, при этом в момент пересечения границы дискретных секторов, при угловом значении α23 коррекция расчетного угла αСБ не производится, так как код, формируемый датчиком угла, не меняется.
В момент времени t4 СБ прекращает вращение и достигает положения αФ(i+1), при этом расчетный угол αСБ совпадает с заданным αЗАД, а рассогласование фактического углового положения СБ относительно заданного угла достигает величины δ(i+1)=|αЗАД(i+1)-αФ(i+1)|.
Далее КА продолжает изменять свое положение относительно направления на Солнце, при этом СБ не вращается, так как порог срабатывания не достигнут. В момент t5 ток СБ вновь достигает максимального значения IСБ=IMAX.
В момент времени t6, после достижения нового рассогласования между заданным и расчетным углами СБ, на величину шага изменения заданного угла αШ, СБ начинает вращение от углового значения αФ(i+1). Поскольку расчетная угловая скорость СБ отличается от фактической, то к моменту t7 пересечения границы секторов α45 рассогласование между расчетным и фактическим углами СБ достигает величины Δ2. При пересечении границы секторов α45 расчетный угол не корректируется, так как коды, формируемые датчиком угла, не меняются.
В момент t45 пересечения границы секторов α45 происходит изменение кода, формируемого датчиком угла, при этом расчетному углу СБ присваивают угловое значение угла коррекции, вычисляемого в соответствии с формулой (21).
В момент времени t8 СБ прекращает вращение и достигает положения αФ(i+2), при этом рассогласование фактического углового положения СБ относительно заданного угла составляет δ(i+2)=|αЗАД(i+2)-αФ(i+2)|, а расчетное и заданное угловые положения СБ совпадают.
Предлагаемый способ управления положением СБ позволяет:
- увеличить живучесть системы за счет обеспечения управления положением СБ при наличии отказов в датчике, определяющем угловое положение СБ;
- повысить надежность системы управления СБ, так как в процессе управления СБ для коррекции расчетного угла можно использовать более простые датчики, определяющие только границы секторов, без определения положения выходного вала ЭМП СБ.
Источники информации:
1. Патент РФ RU 2356788 C1, B64C 1/00, 28.12.2007 г.
Изобретение относится к системам электроснабжения космических аппаратов (КА). Согласно способу, солнечную батарею (СБ) КА вращают с установившейся расчетной угловой скоростью, на порядок и более превышающей угловую скорость обращения КА по орбите вокруг Земли. Определяют угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ в связанных координатах. Разбивают полный круг датчика угла на равные дискретные сектора, каждому из которых соответствует произвольное значение на выходе датчика. Задают шаг изменения заданного угла, кратный величине дискретного сектора. Вычисляют заданный угол как целое число шагов изменения этого угла в угловом положении указанной проекции единичного вектора нормали. Задают пороги срабатывания и отпускания, а также начальное угловое положение СБ, при котором указанная нормаль совпадает с биссектрисой одного из угловых секторов. Начальное значение расчетного угла (как произведения расчетной угловой скорости на время вращения) соответствует угловому положению этой нормали. В момент изменения показаний датчика присваивают расчетному углу значение, равное целому числу содержащихся в нем дискретных секторов, увеличенное на половину сектора. Пороговое значение времени контроля задают большим времени вращения СБ на угол с максимальным числом угловых секторов с одинаковыми выходными значениями. При вращении СБ осуществляют отсчет времени коррекции расчетного угла. Формируют сигнал отказа, если время коррекции достигает или превышает пороговое значение времени контроля. Техническим результатом изобретения является повышение надежности и живучести системы управления СБ, способной давать правильную ориентацию СБ на Солнце в случае отказов, обусловленных ошибочными значениями измеренных датчиком угловых положений СБ. 3 ил.
Способ управления положением солнечной батареи космического аппарата при частичных отказах датчика угла, заключающийся в том, что определяют установившуюся угловую скорость солнечной батареи, разбивают круг датчика угла в 360° на равные дискретные сектора, определяют угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи относительно связанных с космическим аппаратом осей координат, вычисляют расчетный угол солнечной батареи как произведение указанной угловой скорости на время ее вращения, определяют угол разгона как величину изменения углового положения нормали от момента выдачи команды на вращение до момента достижения установившейся угловой скорости. определяют угол торможения как величину изменения углового положения упомянутой нормали от момента выдачи команды на прекращение вращения до полного прекращения вращения, принимают угол разгона равным углу торможения, задают порог срабатывания, при достижении которого формируется рассогласование между заданным и расчетным углами, задают порог отпускания, при достижении которого прекращается рассогласование между заданным и расчетным углами солнечной батареи, менее порога срабатывания, осуществляют вращение солнечной батареи в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами, отличающийся тем, что принимают установившуюся угловую скорость солнечной батареи в качестве расчетной, превышающей на порядок и более угловую скорость вращения космического аппарата вокруг Земли, задают максимальное отклонение расчетной угловой скорости от фактической на порядок и менее угловой скорости вращения солнечной батареи, принимают порог отпускания равным углу торможения, за начальное угловое положение нормали к рабочей поверхности солнечной батареи принимают угол, при котором положение указанной нормали совпадает с угловым положением биссектрисы начального дискретного сектора датчика угла, причем биссектрисе нулевого сектора датчика угла соответствует нулевое угловое положение вышеуказанной проекции единичного вектора, каждому дискретному сектору датчика угла присваивают произвольный код, не связанный с угловым положением солнечной батареи, задают дискретный сектор датчика угла более удвоенной суммы углов разгона и торможения, при этом максимальная суммарная угловая величина σмах последовательно расположенных дискретных секторов с одинаковыми значениями не должна превышать величины
где ωСБ - расчетное значение установившейся угловой скорости солнечной батареи;
ΔωСБ - максимальное отклонение расчетной угловой скорости от фактической;
σ - величина дискретного сектора датчика угла,
задают шаг изменения заданного угла кратным величине дискретного сектора датчика угла при условии
где αотп - порог отпускания;
αш - шаг изменения заданного угла;
IMIN - задаваемый минимально допустимый ток;
Imax - максимально возможный ток,
задают порог срабатывания не более половины шага изменения заданного угла, устанавливают солнечную батарею в положение, при котором нормаль к ее рабочей поверхности совпадает с угловым положением биссектрисы одного из дискретных секторов датчика угла, при этом расчетному углу задают значение, соответствующее положению этой нормали, вычисляют заданный угол как угловую величину целого числа шагов в угловом положении единичного вектора направления на Солнце относительно связанных с космическим аппаратом осей координат, в момент достижения порога отпускания прекращают вычисление расчетного угла и увеличивают его на величину угла торможения при вращении солнечной батареи в направлении увеличения расчетного угла или уменьшают на эту же величину при вращении в противоположном направлении, при этом в случае изменения значения датчика угла в момент пересечения границы дискретных секторов расчетному углу присваивают угловое значение целого числа дискретных секторов датчика угла, содержащихся в расчетном угле, увеличенное на половину сектора, задают пороговое значение времени контроля большим отношения максимальной суммарной угловой величины последовательно расположенных дискретных секторов, которым соответствуют одинаковые фиксированные значения датчика угла, к разности между расчетной угловой скоростью и максимальным отклонением расчетной угловой скорости от фактической, и меньшим отношения дискретного сектора датчика угла к удвоенной величине максимально возможного отклонения расчетной угловой скорости солнечной батареи от фактической, во время вращения солнечной батареи осуществляют отсчет времени коррекции расчетного угла, обнуляют время коррекции перед началом управления при смене направления вращения, а также в момент изменения значений датчика угла, формируют сигнал отказа, если время коррекции расчетного угла достигает или превышает пороговое значение времени контроля.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2356788C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2361788C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2368547C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2368545C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| US 20080078885 A1, 03.04.2008 | |||
| Индукционаая тигельная печь | 1976 |
|
SU625111A1 |
| KR 0100341819 B1, 26.06.2002. | |||

