Изобретение относится к системам электроснабжения космических аппаратов (КА) с солнечными батареями (СБ).
Электроснабжение бортового оборудования КА в течение всего времени функционирования КА осуществляется при помощи СБ. В случае отсутствия достаточного тока, необходимого для работы бортового оборудования, например, на теневом участке орбиты, электроснабжение бортового оборудования КА может осуществляться в течение ограниченного времени от аккумуляторных батарей, подзарядка которых была произведена током, вырабатываемым СБ на освещенном участке орбиты.
Величина тока, вырабатываемого СБ, зависит от ориентации плоскости ее рабочей поверхности относительно Солнца или другого источника излучения. Для повышения эффективности работы СБ используют бортовые автоматические системы управления (БАСУ), в состав которых входят устройства поворота СБ, выполненные на базе электромеханических приводов (ЭМП) с закрепленными на выходном валу датчиками.
Алгоритмы управления современных КА реализуются в виде программного обеспечения в бортовых вычислительных машинах, входящих в состав БАСУ. С помощью указанных программ осуществляется обработка информации, полученной от соответствующих датчиков, установленных на борту КА, при этом решаются задачи, связанные с определением положения КА в пространстве, управлением его положением и движением по заданной орбите, а также управлением бортовым оборудованием, входящим в его состав. Одной из задач, решаемых в БАСУ, является управление положением СБ. При помощи программного обеспечения системы управления движением (СУД) осуществляется определение направления на Солнце относительно связанных с КА осей координат и формирование для программного обеспечения управления положением СБ заданного угла. В случае рассогласования между сформированным заданным и текущим угловым положением СБ более порога срабатывания, программное обеспечение управления положением СБ формирует команды на вращение СБ в направлении уменьшения этого рассогласования, которые поступают с выхода БАСУ в устройство поворота СБ. После уменьшения указанного рассогласования до величины порога отпускания, программное обеспечение управления положением СБ формирует команды на прекращение вращения СБ.
Наиболее близким техническим решением является способ ориентации СБ, заключающийся в том, что определяют заданный угол солнечной батареи относительно связанных с космическим аппаратом осей координат как положения проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, определяют угловую скорость вращения солнечной батареи, вычисляют расчетный угол солнечной батареи как произведение угловой скорости на время ее вращения, определяют угол разгона как величину изменения углового положения нормали от момента выдачи команды на начало вращения при формировании рассогласования между заданным и расчетным углами до момента достижения установившейся угловой скорости, определяют угол торможения как величину изменения углового положения нормали от момента выдачи команды на прекращение вращения при окончании рассогласования до полного прекращения вращения, задают порог срабатывания, при достижении которого формируется рассогласование между заданным и расчетным углами, задают порог отпускания, при достижении которого прекращается рассогласование между заданным и расчетным углами солнечной батареи, менее порога срабатывания, принимают углы разгона, торможения и порог отпускания равными друг другу, вращают солнечную батарею в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами [1].
Как правило, управление положением СБ осуществляется с использованием в обратной связи информации от датчика углового положения выходного вала ЭМП СБ. Во время полета КА по заданной орбите возможно появление длительных электромагнитных помех, либо электростатических разрядов, которые могут приводить к сбоям информации от этого датчика. Кроме того, в процессе функционирования возможно появление отказов в датчике угла, а также в устройствах или линиях связи БАСУ, через которые передается информация углового положения СБ. Указанные сбои и отказы могут привести к неправильной ориентации СБ, что приводит, в свою очередь, к снижению электроснабжения бортового оборудования и в конечном итоге к нарушениям при выполнении задач, решаемых на борту КА.
Технической задачей предлагаемого изобретения является расширение функциональных возможностей известного способа ориентации СБ с целью обеспечения правильной ориентации солнечной батареи по формируемому ею току в случае отсутствия информации об ее угловом положении.
Указанный технический результат достигается тем, что в известном способе ориентации солнечной батареи космического аппарата, заключающемся в том, что определяют заданный угол солнечной батареи относительно связанных с космическим аппаратом осей координат как положения проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, определяют угловую скорость вращения солнечной батареи, вычисляют расчетный угол солнечной батареи как произведение угловой скорости на время ее вращения, определяют угол разгона как величину изменения углового положения нормали от момента выдачи команды на начало вращения при формировании рассогласования между заданным и расчетным углами до момента достижения установившейся угловой скорости, определяют угол торможения как величину изменения углового положения нормали от момента выдачи команды на прекращение вращения при окончании рассогласования до полного прекращения вращения, задают порог срабатывания, при достижении которого формируется рассогласование между заданным и расчетным углами, задают порог отпускания, при достижении которого прекращается рассогласование между заданным и расчетным углами солнечной батареи, менее порога срабатывания, принимают углы разгона, торможения и порог отпускания равными друг другу, вращают солнечную батарею в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами, дополнительно определяют период полного оборота, направление и угловую скорость вращения космического аппарата вокруг Земли по круговой орбите, задают угловую скорость вращения солнечной батареи, превышающую на порядок и более угловую скорость вращения космического аппарата вокруг Земли, определяют максимально возможный и минимально допустимый токи, вырабатываемые солнечной батареей, разбивают круг вращения нормали к рабочей поверхности солнечной батареи на равные угловые сектора, величиной более суммы углов разгона и торможения и менее арккосинуса отношения минимально допустимого и максимально возможного токов, вырабатываемых солнечной батареей, причем биссектрисе нулевого сектора датчика угла соответствует нулевое угловое положение вышеуказанной проекции единичного вектора, определяют период вращения солнечной батареи, как отношение времени полного оборота космического аппарата вокруг Земли к числу угловых секторов круга вращения нормали, определяют время разворота солнечной батареи за один период вращения, как отношение величины одного углового сектора к угловой скорости солнечной батареи, задают порог срабатывания не более половины одного углового сектора, присваивают заданному углу значения, равные угловому положению биссектрисы углового сектора, в границах которого находится угловое положение проекции единичного вектора направления на Солнце, перед началом управления вращают солнечную батарею по или против часовой стрелки, и измеряют вырабатываемый ею ток, прекращают вращение солнечной батареи после начала снижения достигнутого тока наибольшей величины, присваивают расчетному углу солнечной батареи значение заданного угла, во время управления по рассогласованию между заданным и расчетным углами в порядке следования запоминают моменты времени прекращения вращения, достижения током, вырабатываемым солнечной батареей, наибольшей величины и начала следующего вращения, в случае снижения тока, вырабатываемого солнечной батареей, менее минимально допустимого, либо при достижении наибольшей величины вырабатываемого тока в моменты окончания или начала следующего вращения, изменяют значение расчетного угла после окончания упомянутого следующего вращения на величину
Δα=ωO·(tЗАП2-tЗАП1-0,5·TCБ),
где Δα - поправка к расчетному углу, ωО - угловая орбитальная скорость космического аппарата, tЗАП1 - запомненное значение времени отсчета в момент формирования команды на прекращение вращения, tЗАП2 - запомненное значение времени отсчета на момент достижения вырабатываемым солнечной батареей током наибольшей величины, ТСБ - период вращения солнечной батареи, увеличивают или уменьшают расчетный угол на величину поправки при вращении солнечной батареи во время отсчета времени соответственно в направлении увеличения или уменьшения угла.
На фиг.1 представлены положения КА на орбите Земли, на фиг.2 - зависимость тока, вырабатываемого СБ, от углового положения СБ относительно направления на Солнце, на фиг.3 - временные зависимости углового положения СБ и вырабатываемого ею тока при совпадении расчетного и фактического углов, на фиг.4 и 5 - временные зависимости углового положения СБ и вырабатываемого ею минимально допустимого тока при рассогласовании расчетного и фактического углов соответственно менее и более половины одного сектора круга вращения СБ.
Предлагаемый способ реализуется следующим образом.
На этапе наземной подготовки КА к пуску определяют направление движения и угловую скорость вращения КА по орбите вокруг Земли. Для управления ориентацией СБ применяют ЭМП с закрепленной на его выходном СБ с установившейся угловой скоростью вращения на порядок и более превышающей угловую скорость вращения КА вокруг Земли, то есть

где ωО - угловая скорость вращения КА вокруг Земли;
ωСБУ - установившаяся угловая скорость СБ.
По паспортным данным или по результатам экспериментов на стендах определяют:
- значение установившейся угловой скорости вращения выходного вала ЭМП СБ;
- угол разгона СБ, как величину изменения углового положения нормали к рабочей поверхности СБ, начиная с момента начала рассогласования между заданным и расчетным углами, при котором формируется команда на вращение до момента достижения СБ установившейся угловой скорости;
- угол торможения, как величину изменения углового положения указанной нормали от момента прекращения рассогласования между заданным и расчетным углами, в результате которого формируется команда на прекращение вращения СБ до полного прекращения ее вращения;
- максимально возможное значение тока, которое может вырабатывать СБ;
- минимально допустимый ток, который должна вырабатывать СБ для обеспечения функционирования бортового оборудования КА.
Принимают в качестве расчетной установившуюся угловую скорость СБ, то есть

где ωСБ - расчетная угловая скорость СБ.
Делят круг вращения СБ на равные угловые сектора, то есть
где σ - угловая величина сектора круга вращения СБ;
n - целое число.
При этом угловая величина сектора должна быть в диапазоне

где αРАЗГ - угол разгона СБ;
αТОРМ - угол торможения СБ;
IMAX - максимально возможный ток, вырабатываемый СБ;
IMIN - минимально допустимый ток СБ.
Биссектрисе нулевого углового сектора должно соответствовать нулевое угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных к КА осей координат.
Определяют период вращения СБ, как
где TO - период полного оборота КА вокруг Земли;
ТСБ - период вращения СБ.
В процессе управления ориентацией СБ определяют угол между заданным и расчетным углами СБ, как

где Δα - угол между заданным и расчетным углами СБ;
αСБ - расчетный угол СБ;
αЗАД - заданный угол СБ.
Задают порог отпускания, как угол между заданным и расчетным углами СБ, при достижении которого прекращается рассогласование и формируется команда на прекращение вращения СБ, при этом порог отпускания, а также углы разгона и торможения принимают равными друг другу, то есть

где αОТП - порог отпускания.
Задают порог срабатывания, как угол между заданным и расчетным углами СБ, при достижении которого появляется рассогласование и формируется команда на начало вращения СБ в диапазоне

где αСР - порог срабатывания.
После выведения КА на заданную круговую орбиту начинают измерение тока, вырабатываемого СБ. Одновременно при помощи алгоритмов СУД непрерывно осуществляют определение углового положения проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат.
Перед началом управления производят начальную установку положения СБ, при этом выдают команду на вращение СБ в одном направлении по или против часовой стрелки. В момент достижения наибольшего тока и начала его снижения, до величины, например, ~90% от достигнутого наибольшего значения, выдают команду на прекращение вращения СБ. После этого расчетному углу СБ задают значение углового положения проекции единичного вектора направления на Солнце

где αСБ - расчетное угловое положение СБ;
αСБN - угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат.
Определяют заданный угол, как угловое положение биссектрисы сектора, в границах которого находится угловое положение проекции αСБN, то есть

где αЗАД - заданный угол СБ;
i - номер углового сектора круга вращения СБ.
В момент появления рассогласования между заданным и расчетным углами СБ не менее порога срабатывания вращают ее по кратчайшему пути в направлении уменьшения угла между ними, выдавая соответствующую команду на вращение, то есть при

В момент прекращения рассогласования между заданным и расчетным углами СБ не более порога отпускания прекращают ее вращение, выдавая соответствующую команду на прекращение вращения, то есть при

Во время вращения СБ, с момента начала до момента прекращения рассогласования, производят вычисление расчетного угла, как

где j - шаг изменения заданного угла (целое число);
αj - угловое положение СБ в момент начала вращения на j-м шаге изменения заданного угла;
αj+1 - угловое положение СБ после окончания вращения на j-м шаге изменения заданного угла;
tj - время вращения СБ на j-м шаге изменения заданного угла;
ωСБ - расчетная угловая скорость вращения СБ.
Во время полета КА по круговой орбите положение нормали αСБN изменяется равномерно и непрерывно, при этом заданный угол в соответствии с уравнением [10] увеличивается или уменьшается дискретно с шагом в один сектор. В случае изменения заданного угла на один сектор появляется рассогласование и СБ начинает вращение, при этом производят вычисление расчетного угла СБ в соответствии с уравнением [13].
После прекращения рассогласования расчетный угол достигает значения заданного угла и, таким образом, изменяется на величину одного сектора.
При вращении в направлении увеличения заданного угла положение СБ после окончания вращения можно определить, как

Запоминают момент времени прекращения вращения СБ

где tЗАП1 - запомненное значение времени на момент прекращения вращения СБ;
tТЕК - текущее время.
Запоминают момент времени достижения вырабатываемым СБ током наибольшего значения на интервале времени от момента прекращения до момента начала нового вращения СБ

где tЗАП2 - запомненное значение времени на момент достижения током наибольшего значения;
IСБ - текущее значение вырабатываемого СБ тока;
IНЗj - наибольшее значение тока от момента прекращения j-го до момента начала (j+1)-го вращения СБ.
Запоминают момент времени начала нового (j+1)-го вращения СБ

где tЗАП3 - запомненное значение времени на момент начала нового (j+1)-го вращения СБ.
Если ток, вырабатываемый СБ, достигает наибольшего значения в моменты окончания или начала следующего вращения, либо достигает на указанном интервале в любой момент времени величины менее минимально допустимого, то есть при

Учитывая, что в соответствии с уравнением [5] момент времени начала следующего (j+1)-го вращения отличается от момента окончания j-го вращения на величину периода вращения СБ

Поправку к расчетному углу вычисляют, как

где Δα - поправка к расчетному углу.
В случае, если угловое положение проекции αСБN и, соответственно, вращение СБ осуществлялось на (j+1)-м вращении в направлении увеличения угла, то расчетный угол после окончания вращения увеличивают на величину поправки, то есть

В случае, если угловое положение проекции αСБN и, соответственно, вращение СБ осуществлялось на (j+1)-м вращении в направлении уменьшения угла, то расчетный угол после окончания вращения уменьшают на величину поправки, то есть

Предлагаемый способ ориентации СБ КА по току может быть реализован при помощи алгоритмов БАСУ и средств наземного комплекса управления (НКУ). В моменты начала и окончания вращения СБ собранная на борту КА телеметрическая информация передается при помощи средств связи в НКУ. Указанная информация содержит привязанные ко времени данные об угловом положении проекции единичного вектора направления на Солнце, заданный и расчетные углы СБ, а также информацию о величине вырабатываемого СБ тока. Из НКУ передаются команды на установку СБ в начальное положение, а также значения угловых поправок к расчетному углу.
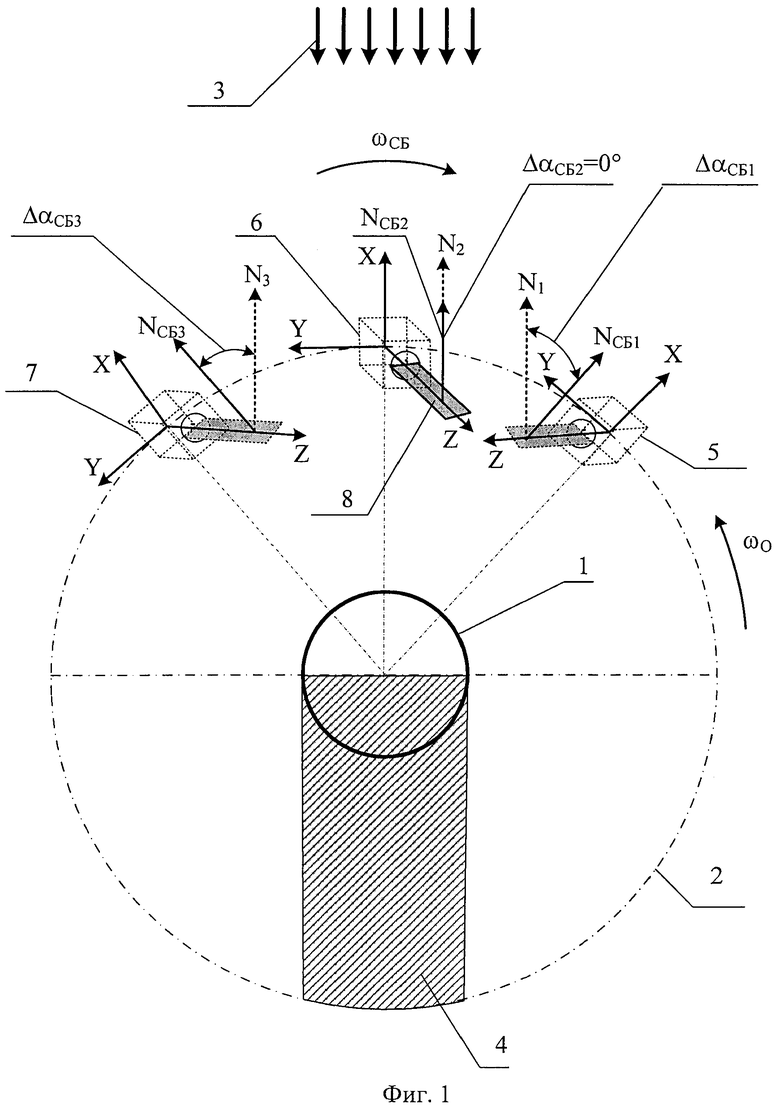
На фиг.1 представлены положения КА на орбите Земли, где:
1 - Земля;
2 - круговая орбита КА;
3 - излучение от Солнца;
4 - теневой участок орбиты;
5 - условное изображение КА на момент окончания вращения СБ;
6 - положение КА на момент середины интервала времени между вращениями СБ;
7 - положение КА на момент начала следующего вращения СБ;
8 - солнечная батарея;
N1, N2, N3 - проекции единичных векторов направлений на Солнце на плоскости вращения нормалей к рабочей поверхности СБ относительно связанных с КА осей координат в позициях 5, 6, 7 КА;
X, Y, Z - связанные с КА оси координат:
Х - ось КА по каналу рыскания,
Y - ось КА по каналу крена,
Z - ось КА по каналу тангажа;
ωО - угловая скорость вращения КА вокруг Земли;
ωСБ - расчетная угловая скорость вращения СБ;
NСБ1, NСБ2, NСБ3 - текущие положения нормали к рабочей поверхности СБ в моменты окончания вращения, середины интервала времени между вращениями и в момент начала следующего вращения СБ соответственно;
ΔαСБ1 - угловое отклонение нормали к рабочей поверхности СБ от направления проекции единичного вектора направления на Солнце на плоскость ее вращения, соответствующее положению СБ на момент отставания нормали от проекции на половину сектора;
ΔαСБ2 - нулевое отклонение нормали к рабочей поверхности СБ от направления проекции единичного вектора на Солнце;
ΔαСБ3 - угловое отклонение нормали к рабочей поверхности СБ от направления проекции единичного вектора направления на Солнце на плоскость ее вращения, соответствующее положению СБ на момент опережения нормалью направления проекции на половину сектора.
На фиг.1 показаны три положения 5, 6, 7 КА, которые он может занимать во время полета по круговой орбите 2 Земли 1. При этом он вращается с орбитальной угловой скоростью ωО, направленной против часовой стрелки. Ось Х (рыскания) связанных с КА осей координат X, Y, Z направлена от центра Земли. На борту КА установлена солнечная батарея 8 (в положении КА 6, ось вращения которой совпадает с осью Z (тангажа), при этом плоскость, образованная вращением нормали к рабочей поверхности СБ NСБ1, NСБ2, NСБ3 (в положениях КА 5, 6, 7), параллельна плоскости, образованной осями Х (рыскания) и Y (крена) связанных с КА осей координат, которая параллельна плоскости орбиты 2. Проекции единичного вектора направления на Солнце N1, N2, N3 на плоскость, образованную вращением нормали к рабочей поверхности NСБ1, NСБ2, NСБ3 (в положениях КА 5, 6, 7), направлены навстречу излучения от Солнца 3. Во время полета по орбите Земли КА периодически входит в теневой участок орбиты 4. В процессе полета осуществляется периодическое вращение СБ. При достижении порога срабатывания СБ начинает вращение вокруг оси Z (тангажа) с угловой скоростью ωСБ на порядок и выше угловой скорости вращения КА ωО вокруг Земли. При достижении порога отпускания СБ прекращает вращение.
В положении КА 5 показано направление нормали к рабочей поверхности СБ NСБ1 на момент прекращения ее вращения. При этом рассогласование между проекцией N1 и нормалью NСБ1 соответствует углу ΔαСБ1. В указанном положении нормаль к рабочей поверхности СБ NСБ1 опережает положение проекции единичного вектора направления на Солнце N.
В положении КА 6 показано положение нормали к рабочей поверхности СБ NСБ2, совпадающей с положением проекции единичного вектора направления на Солнце N2. При этом рассогласование между проекцией N2 и нормалью NСБ2 соответствует нулевому значению угла, то есть ΔαСБ2=0. СБ в данном положении вырабатывает наибольший ток.
В положении КА 7 показано направление нормали к рабочей поверхности СБ NСБ3 на момент начала ее вращения. При этом рассогласование между проекцией N3 и нормалью NСБ3 соответствует углу ΔαСБ3. В указанном положении нормаль к рабочей поверхности СБ NСБ3 отстает от положения проекции единичного вектора направления на Солнце N3.
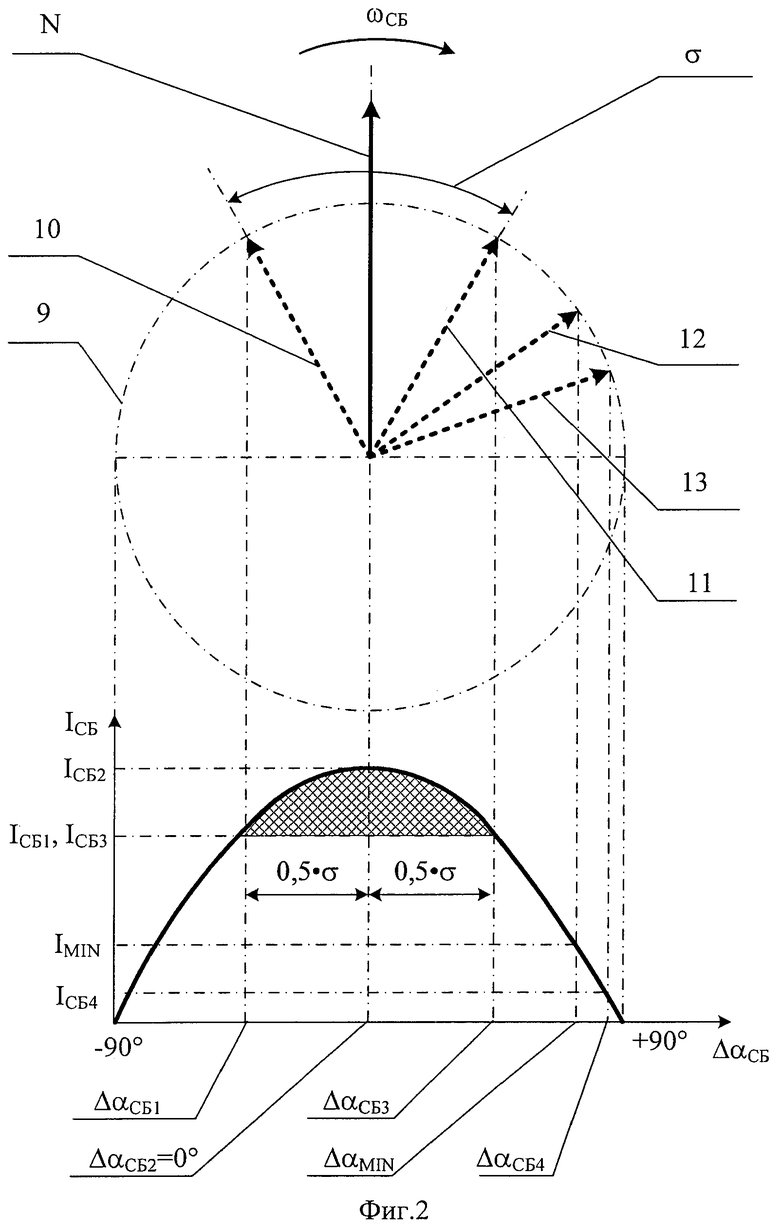
На фиг.2 показана зависимость тока, вырабатываемого СБ, от углового положения СБ относительно направления на Солнце, где:
9 - круг вращения СБ;
10 - положение СБ на момент отставания от заданного угла на величину половины сектора;
11 - положение СБ на момент опережения заданного угла на величину половины сектора;
12 - положение СБ на момент отклонения от направления на Солнце на величину, соответствующую минимальному значению тока;
13 - положение СБ на момент отклонения от направления на Солнце на величину соответствующую значению тока менее минимально допустимого для обеспечения работоспособности бортового оборудования;
N - проекция единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат;
ωСБ - угловая скорость вращения СБ;
σ - угловая величина одного сектора круга вращения СБ;
IСБ - ток, вырабатываемый СБ;
ΔαСБ - величина углового рассогласования между направлением нормали к рабочей поверхности СБ и проекцией единичного вектора направления на Солнце на плоскость ее вращения;
IСБ1, IСБ3 - токи, вырабатываемые СБ, соответствующие отклонениям СБ от направления на Солнце на половину сектора;
IСБ2 - наибольший ток, вырабатываемый СБ при совпадении нормали к рабочей поверхности СБ с направлением на Солнце;
IMIN - минимально допустимый ток, который должна вырабатывать СБ для обеспечения работоспособности бортового оборудования;
IСБ4 - ток, менее минимально допустимого для обеспечения работоспособности бортового оборудования;
ΔαСБ1 - угловое отклонение нормали к рабочей поверхности СБ от направления проекции единичного вектора направления на Солнце на плоскость ее вращения, соответствующее положению СБ на момент отставания нормали от проекции на половину сектора;
ΔαСБ2 - нулевое отклонение нормали к рабочей поверхности СБ от направления проекции единичного вектора на Солнце;
ΔαСБ3 - угловое отклонение нормали к рабочей поверхности СБ от направления проекции единичного вектора направления на Солнце на плоскость ее вращения, соответствующее положению СБ на момент опережения нормалью направления проекции на половину сектора;
ΔαMIN - угловое отклонение СБ от направления на Солнце, соответствующее положению СБ на момент вырабатывания минимально допустимого тока;
Δα4 - угловое отклонение СБ от направления на Солнце на момент вырабатывания тока менее минимально допустимого.
На фиг.2 представлена зависимость вырабатываемого СБ тока IСБ от угла рассогласования Δα между положениями нормали к рабочей поверхности СБ и проекции единичного вектора направления на Солнце N на плоскость ее вращения. Во время полета КА по заданной орбите СБ периодически вращается с угловой скоростью ωСБ, при этом нормаль к ее рабочей поверхности изменяет положение относительно центра круга 9 на угол, равный величине одного сектора σ. В положении 10 эта нормаль отстает от положения проекции N на величину половины сектора σ, то есть ΔαСБ1=-0,5·σ, что соответствует вырабатываемому СБ току IСБ1. При совпадения нормали с проекцией вектора направления на Солнце N, то есть при ΔαСБ2, СБ вырабатывает наибольший ток IСБ2. В положении 11 нормаль к рабочей поверхности СБ опережает положение проекции направления на Солнце на величину половины сектора σ, то есть ΔαСБ3=+0,5·σ, что соответствует току IСБ3. В положении 12 нормаль к рабочей поверхности СБ опережает положение проекции направления на Солнце на величину, соответствующую минимально допустимому значению тока IMIN. В положении 13 нормаль к рабочей поверхности СБ опережает положение проекции направления на Солнце на угол ΔαСБ4, соответствующее значению тока IСБ4 менее минимально допустимого.
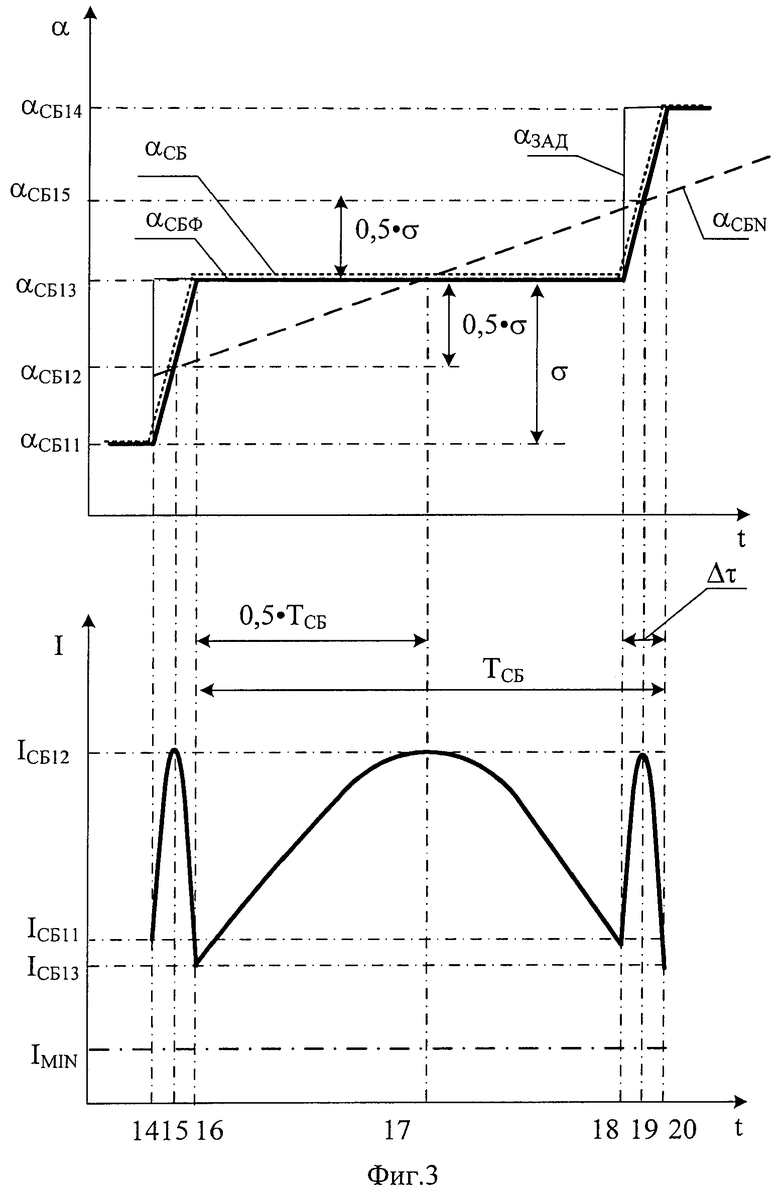
На фиг.3 представлены временные зависимости углового положения СБ и вырабатываемого ею тока при совпадении расчетного и фактического углов, где:
14-20 - моменты времени t изменения состояний (или положений??) СБ:
14, 16, 18, 20 - моменты времени, соответствующие отклонениям СБ от направления на Солнце на половину сектора;
15, 17, 19 - моменты времени, соответствующие совпадению нормали к рабочей поверхности СБ с направлением на Солнце;
αСБN - угловое значение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат;
αЗАД - заданный угол СБ;
αСБФ - фактический угол СБ;
αСБР - расчетный угол СБ;
σ - сектора круга вращения СБ;
IСБ11 - ток, вырабатываемый СБ при отставании положения нормали к рабочей поверхности СБ от направления на Солнце на половину углового сектора σ;
IСБ12 - наибольший ток СБ, при совпадении нормали к рабочей поверхности СБ с проекцией направления на Солнце на плоскость ее вращения;
IСБ13 - ток, вырабатываемый СБ при опережении положения нормали к рабочей поверхности СБ направления на Солнце на половину углового сектора σ;
IMIN - минимально допустимый ток;
ТСБ - период вращения СБ;
Δτ - время вращения СБ;
αСБ11, αСБ12, αСБ13, αСБ14, αСБ15 - углы, соответствующие различным положениям СБ.
В представленном на фиг.3 варианте расчетный αСБ и фактический αСБФ угловые положения СБ приблизительно совпадают. Угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ αСБN изменяется в направлении увеличения. При достижении проекцией αСБN соответствующих угловых значений IСБ11 и IСБ13, в моменты времени 14 и 18 заданный угол αЗАД изменяется на величину углового сектора σ. В момент времени 14 СБ вырабатывает ток IСБ11, при этом заданный угол αЗАД изменяет свое значение с αСБ11 до αСБ13. Рассогласование между заданным αЗАД и расчетным αСБ углами СБ в момент изменения достигает порога срабатывания, после чего СБ начинает движение из положения αСБ11 до положения αСБ13. В момент времени, соответствующий точке 15, угловое положение проекции единичного вектора направления на Солнце αСБN совпадает с расчетным αСБ и фактическим αСБФ углами, то есть αСБN=αСБ=αСБФ=αСБ12, при этом СБ вырабатывает наибольший ток IСБ12, а в момент времени 16 - минимальный ток IСБ13. С момента 16 до момента 18 угловое положение проекции αСБN изменяется на величину углового сектора σ от угла αСБ13 до угла αСБ14. В момент времени 17 угловое положение проекции αСБN, расчетное αСБ и фактическое αСБФ угловые положения СБ совпадают, при этом СБ вырабатывает наибольший ток IСБ12. В момент времени 18 СБ начинает вращение из положения αСБ13 до положения αСБ14 в точке 20, при этом в точке 19 в момент достижения угла αСБ15 СБ вырабатывает наибольший ток IСБ12.
Таким образом, угловое положение проекции αСБN смещается на величину одного углового сектора σ за один период вращения СБ ТСБ, который можно определить, как
Фактическое угловое положение СБ αСБФ смещается на величину одного углового сектора σ за время вращения СБ Δτ, которое можно определить, как
где Δτ - время вращения СБ;
ωСБ - расчетная угловая скорость СБ.
В соответствии с неравенством (1) угловая скорость вращения СБ ωСБ на порядок и более превышает орбитальную угловую скорость КА ωO, поэтому время вращения СБ Δτ при расчетах можно не учитывать. Таким образом, в течение одного периода вращения СБ от момента 16 до момента 18 наибольший ток IСБ12 вырабатывается в момент времени 17, приблизительно в середине периода вращения СБ ТСБ.
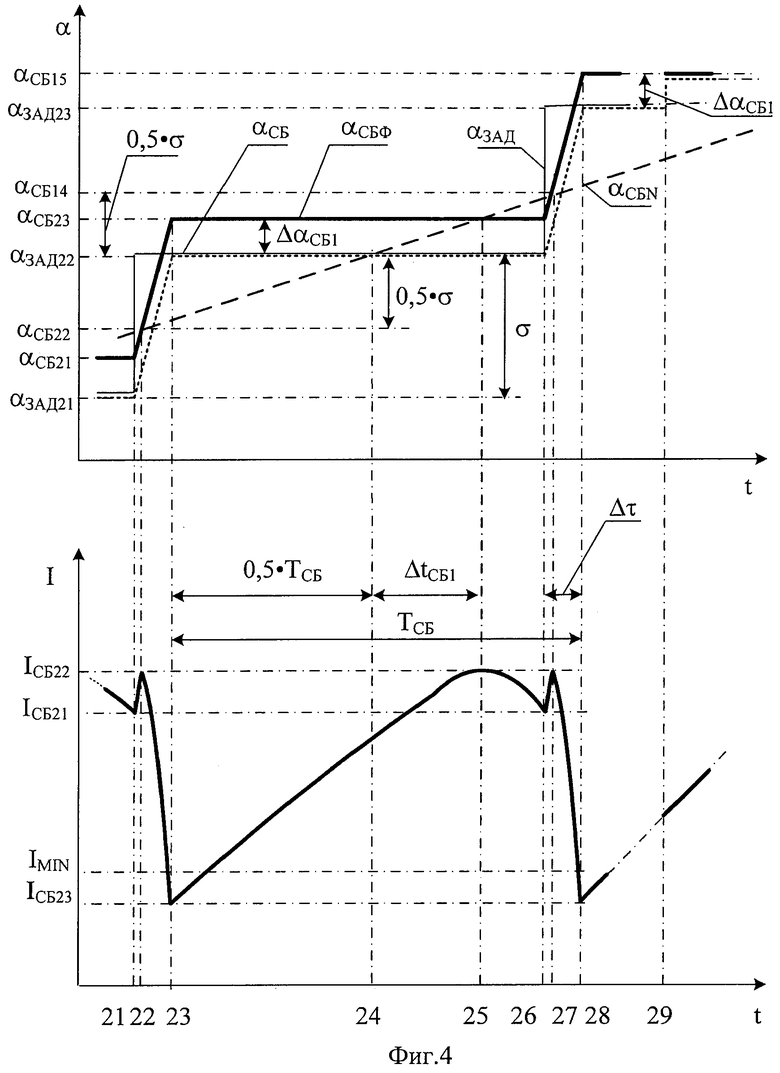
На фиг.4 представлены графики соответствия углов и тока, вырабатываемого СБ, при котором он достигает минимально допустимого значения при рассогласовании расчетного и фактического углов менее половины одного сектора круга вращения СБ.
На фиг.4 представлены временные зависимости углового положения СБ и вырабатываемого ею минимально допустимого тока при рассогласовании расчетного и фактического углов менее половины одного сектора круга вращения СБ, где:
αСБN - угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ;
αЗАД - заданное угловое положение СБ;
αСБФ - фактическое угловое положение СБ;
αСБ - расчетное угловое положение СБ;
21-29 - моменты времени t изменения положений СБ;
21, 26 - моменты времени, соответствующие началам вращения СБ;
23, 28 - моменты времени, соответствующие окончаниям вращения СБ;
22, 25, 27 - моменты времени, соответствующие совпадениям нормали к рабочей поверхности СБ с направлением на Солнце;
29 - момент времени коррекции расчетного угла;
σ - угловая величина одного сектора круга вращения СБ;
IСБ21 - ток, вырабатываемый СБ на момент начала вращения;
IСБ22 - максимальный ток, вырабатываемый СБ, соответствующий совпадению нормали к рабочей поверхности СБ с проекцией направления на Солнце на плоскость ее вращения;
IСБ23 - ток, вырабатываемый СБ на момент окончания вращения;
IMIN - минимально допустимый ток;
ТСБ - период вращения СБ;
Δτ - время вращения СБ;
ΔαСБ1 - рассогласование между фактическим и расчетным угловым положением СБ до коррекции;
αЗАД21, αЗАД22, αЗАД23 - заданные и расчетные угловые положения СБ;
αСБ21, αСБ22, αСБ23, αСБ24, αСБ25 - фактические угловые положения СБ.
На фиг.4 ток, вырабатываемый СБ, достигает величины менее минимально допустимого значения IMIN в момент прекращения вращения, при отставании расчетного углового положения СБ αСБ от фактического αСБФ на величину ΔαСБ2 менее половины углового сектора σ, то есть при ΔαСБ2<0,5·σ. В приведенном примере угловое положение αСБN проекции единичного вектора направления на Солнце изменяет свое значение в направлении увеличения угла. В момент времени 21 СБ вырабатывает ток αСБ21, при этом заданный угол αЗАД изменяется на величину одного сектора σ со значения αЗАД21 до αЗАД22, одновременно с этим величина угла рассогласования между расчетным αСБ и заданным αЗАД углами начинает превышать порог срабатывания αСР, в связи с чем формируется команда и СБ начинает вращение в направлении увеличения угла. В процессе вращения фактическое угловое положение СБ αСБФ изменяется от значения αСБ21 в момент 21 до αСБ23 в момент 23, в котором СБ вырабатывает минимальное значение тока IСБ23, менее минимально допустимого значения IMIN. Во время вращения в момент времени 22 СБ вырабатывает максимальный ток IСБ22, так как заданный αЗАД и фактический αСБФ углы совпадают, что соответствует угловому положению αСБ22. После достижения в момент 23 фактическим углом αСБФ значения IαСБ23 до момента 26 расчетное угловое положение СБ αСБ отстает от фактического αСБФ на величину рассогласования ΔαСБ1. В течение интервала времени от момента 23 до момента 26 угловое положение проекции αСБN изменяется на величину одного углового сектора σ.
В момент времени 23 окончания вращения СБ запоминают значение времени, то есть

где tЗАП1 - запомненное значение времени на момент окончания вращения СБ;
t23 - время, соответствующее моменту окончания вращения 23.
После этого осуществляют измерение тока СБ и запоминают момент времени 25, соответствующий достижению наибольшего значения тока IСБ22, которое вырабатывается в момент совпадения углового положения проекции αСБN и фактического угла αСБФ, как

где tЗАП2 - запомненное значение времени совпадения углового положения проекции и фактического угла;
t25 - время, соответствующее моменту достижения током максимального значения.
Учитывая равномерный, линейный характер изменения углового положения проекции αСБN, заданный и расчетный углы совпадают на середине периода вращения СБ ТСБ, при этом время вращения Δτ СБ при расчетах можно не учитывать в соответствии с уравнениями (1, 23, 24). Далее определяют разность ΔtСБ1

где ΔtСБ1 - разность между запомненными значениями времени;
t25 - время, соответствующее моменту времени 25;
t23 - время, соответствующее моменту времени 23;
ТСБ - период вращения СБ.
Угловую поправку ΔαСБ1, на которую необходимо откорректировать расчетное угловое положение СБ αСБ, вычисляют как

где ΔαСБ1 - угловая поправка к расчетному углу;
ωO - угловая орбитальная скорость КА;
ΔtСБ1 - разность между запомненными значениями времени в моменты 25 и 24.
В момент 29 расчетный угол αСБ корректируют на величину поправки ΔαСБ1, при этом его значение становится приблизительно равным значению фактического угла, то есть

где αСБР(j) - значение расчетного угла до корректировки;
αСБР(j+1) - значение расчетного угла после корректировки;
ΔαСБ1 - угловая поправка к расчетному углу;
αСБФ - фактический угол.
После коррекции расчетного угла на последующих периодах вращения СБ графики углов и тока, вырабатываемого СБ, будут соответствовать фиг.3.
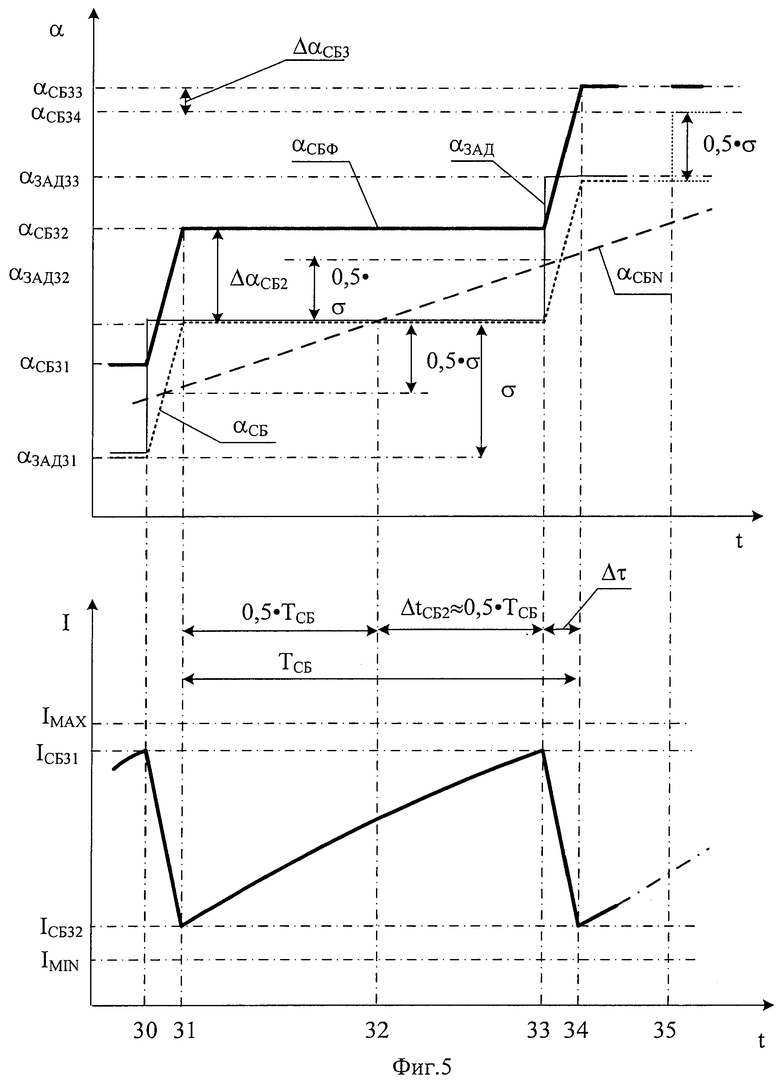
На фиг.5 представлены графики соответствия углов и тока, вырабатываемого СБ, при котором ток достигает минимально допустимого значения при рассогласовании расчетного и фактического углов более половины одного сектора круга вращения СБ.
На фиг.5 представлены временные зависимости углового положения СБ и вырабатываемого ею минимально допустимого тока при рассогласовании расчетного и фактического углов более половины одного сектора круга вращения СБ, где:
αCБN - угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ;
αЗАД - заданное угловое положение СБ;
αСБФ - фактическое угловое положение СБ;
αСБ - расчетное угловое положение СБ;
30-35 - моменты времени t изменения состояний (или положений??) СБ:
30, 33 - моменты времени, соответствующие отклонениям СБ от направления на Солнце в моменты начала вращения СБ;
31, 34 - моменты времени, соответствующие отклонениям СБ от направления на Солнце в моменты окончания вращения СБ;
35 - момент коррекции расчетного угла;
σ - угловая величина одного сектора круга вращения СБ;
IMAX - максимальный ток, вырабатываемый СБ, соответствующий совпадению нормали к рабочей поверхности СБ с проекцией направления на Солнце на плоскость ее вращения;
IMIN - минимально необходимое значение тока для обеспечения работоспособности бортового оборудования;
IСБ31 - ток, вырабатываемый СБ на момент начала вращения;
IСБ32 - ток, вырабатываемый СБ на момент окончания вращения;
ТСБ - период вращения СБ;
Δτ - время вращения СБ;
ΔαСБ2 - рассогласование между фактическим и расчетным угловым положением СБ до коррекции;
ΔαСБ3 - рассогласование между фактическим и расчетным угловым положением СБ после коррекции;
αЗАД31, αЗАД32, αЗАД33 - заданные угловые положения СБ;
αСБ31, αСБ32, αСБ33, αСБ34 - фактические угловые положения СБ.
На фиг.2 ток, вырабатываемый СБ, достигает максимальной величины в момент начала вращения, при отставании расчетного углового положения СБ αСБ от фактического αСБФ на величину ΔαСБ2 более половины углового сектора σ, то есть при ΔαСБ2>0,5·σ. При этом минимально допустимое значение тока не достигается. В момент 30 заданный угол αЗАД изменяется со значения αСБ31 до αСБ32, а в момент 33 - со значения αСБ32 до αСБ33, при этом наблюдается рассогласование заданного αЗАД и расчетного αСБ углов на величину более порога срабатывания, то есть выполняется условие неравенства (12). Одновременно с этим выдается команда, после которой СБ начинает вращение. При достижении порогов отпускания, в соответствии с уравнением (13) в моменты 31 и 34 соответственно, СБ прекращает вращение. До начала вращения в моменты 30 и 33 значение расчетного угла αСБ приблизительно совпадает с заданным αЗАД, что соответствует угловым значениям αЗАД31 и αЗАД33. После окончания вращения СБ, в моменты 31 и 33 он приблизительно совпадает со значениями заданного угла αЗАД32 и αЗАД33 соответственно. Фактические углы αСБФ в моменты 30 и 33, до начала вращения СБ, равны, соответственно, значениям αСБ31 и αСБ32, а в моменты 31 и 33, после окончания вращения, - значениям αСБ32 и αСБ33. В момент времени 32 расчетный угол αСБ совпадает с заданным αЗАД и равен αЗАД31, при этом в момент времени 33, совпадающий с началом вращения СБ, вырабатывается наибольшее значение тока IСБ31, менее максимально возможного IMAX. Рассогласование между фактическим и заданным углами в диапазоне времени 31-33 имеет фиксированную величину ΔαСБ2 более половины углового сектора σ. В моменты окончания вращения СБ вырабатывает ток IСБ32, не достигающий минимально допустимого значения IMIN. Учитывая, что величиной времени вращения СБ Δτ можно пренебречь, разность ΔtСБ2 между запомненными значениями времени в моменты 33 и 32 составляет величину

где ΔtСБ1 - разность между запомненными значениями времени, t33 - время, соответствующее моменту времени 33, t32 - время, соответствующее моменту времени 32, ТСБ - период вращения СБ. В момент 35 расчетный угол dСБ корректируют на величину поправки ΔαСБ2

где αСБ(j) - значение расчетного угла до корректировки;
αСБ(j+1) - значение расчетного угла после корректировки;
ΔαСБ2 - угловая поправка к расчетному углу.
В случае, если на последующем периоде вращения СБ наблюдается значение тока, вырабатываемого СБ менее минимально допустимого значения IMIN, либо ток достигает максимального значения в моменты выдачи команды на вращение или на прекращение вращения СБ. Соответственно в случае прекращения или появления рассогласований между заданным и расчетным углами повторяют указанные выше действия, по запоминанию моментов времени и корректировке расчетного угла. Прекращают выполнение указанных действий, связанных с корректировкой расчетного угла в случае, если ток, вырабатываемый СБ, не снижается менее минимально допустимого значения, а наибольшее значение тока достигается на интервале времени между вращениями СБ.
Следует отметить, что в результате воздействия во время полета КА по заданной орбите на аппаратуру управления и поверхность СБ различных внешних факторов: излучений, перепадов температур, микрометеоритов, статических зарядов и других со временем наблюдается снижение эффективности СБ, результатом которого является снижение тока. Кроме того, наибольший ток, который вырабатывает СБ, может изменяться в течение времени из-за постепенного изменения положения плоскости вращения нормали к рабочей поверхности СБ относительно плоскости орбиты. Предлагаемый способ позволяет обеспечивать правильную ориентацию СБ КА на Солнце по току, без использования информации об угловом положении СБ от датчика угла, в случае его отказов или сбоев, а также в случае изменения положения плоскости вращения нормали к рабочей поверхности СБ относительно плоскости орбиты со временем, что повышает живучесть и увеличивает сроки эксплуатации системы управления положением СБ, а следовательно, и КА в целом.
Источники информации
1. Патент РФ RU 2356788 C1, B64C 1/00, 28.12.2007 г.
Изобретение относится к системам электроснабжения космических аппаратов. Способ включает задание расчетной угловой скорости вращения солнечной батареи (СБ), превышающей на порядок и более угловую скорость обращения космического аппарата вокруг Земли. При этом измеряют вырабатываемый СБ ток, определяют период вращения СБ по рассогласованию между расчетным и заданным ее углами, в направлении уменьшения этого рассогласования. Вращают СБ перед началом управления до момента начала снижения током достигнутой наибольшей величины. Присваивают расчетному углу СБ значение заданного угла, причем вычисляют расчетный угол во время вращения СБ как произведение расчетной угловой скорости на время вращения СБ. Запоминают моменты времени формирования наибольшего тока между моментами прекращения вращения и начала следующего вращения. Корректируют расчетный угол на величину поправки, зависящей от угловой орбитальной скорости космического аппарата, запомненных значений времени в момент прекращения вращения СБ и в момент достижения вырабатываемым СБ током наибольшей величины, а также от периода вращения СБ. Увеличивают или уменьшают расчетный угол на величину поправки при вращении СБ во время отсчета времени соответственно в направлении увеличения или уменьшения угла. Техническим результатом изобретения является расширение функциональных возможностей способа при обеспечении правильной ориентации СБ по формируемому ею току в отсутствии информации об угловом положении СБ. 5 ил.
Способ ориентации солнечной батареи космического аппарата но току, заключающийся в том, что определяют заданный угол солнечной батареи относительно связанных с космическим аппаратом осей координат как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, определяют угловую скорость вращения солнечной батареи, вычисляют расчетный угол солнечной батареи как произведение угловой скорости на время ее вращения, определяют угол разгона как величину изменения углового положения нормали от момента выдачи команды на начало вращения при формировании рассогласования между заданным и расчетным углами до момента достижения установившейся угловой скорости, определяют угол торможения как величину изменения углового положения нормали от момента выдачи команды на прекращение вращения при окончании рассогласования до полного прекращения вращения, задают порог срабатывания, при достижении которого формируется рассогласование между заданным и расчетным углами, задают порог отпускания, при достижении которого прекращается рассогласование между заданным и расчетным углами солнечной батареи, менее порога срабатывания, принимают углы разгона, торможения и порог отпускания равными друг другу, вращают солнечную батарею в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами, отличающийся тем, что определяют период полного оборота, направление и угловую скорость вращения космического аппарата вокруг Земли по круговой орбите, задают угловую скорость вращения солнечной батареи, превышающую на порядок и более угловую скорость вращения космического аппарата вокруг Земли, определяют максимально возможный и минимально допустимый токи, вырабатываемые солнечной батареей, разбивают круг вращения нормали к рабочей поверхности солнечной батареи на равные угловые сектора величиной более суммы углов разгона и торможения и менее арккосинуса отношения минимально допустимого и максимально возможного токов, вырабатываемых солнечной батареей, причем биссектрисе нулевого сектора датчика угла соответствует нулевое угловое положение вышеуказанной проекции единичного вектора, определяют период вращения солнечной батареи, как отношение времени полного оборота космического аппарата вокруг Земли к числу угловых секторов круга вращения нормали, определяют время разворота солнечной батареи за один период вращения как отношение величины одного углового сектора к угловой скорости солнечной батареи, задают порог срабатывания не более половины одного углового сектора, присваивают заданному углу значения, равные угловому положению биссектрисы углового сектора, в границах которого находится угловое положение проекции единичного вектора направления на Солнце, перед началом управления вращают солнечную батарею по или против часовой стрелки и измеряют вырабатываемый ею ток, прекращают вращение солнечной батареи после начала снижения достигнутого тока наибольшей величины, присваивают расчетному углу солнечной батареи значение заданного угла, во время управления по рассогласованию между заданным и расчетным углами в порядке следования запоминают моменты времени прекращения вращения, достижения током, вырабатываемым солнечной батареей, наибольшей величины и начала следующего вращения, при этом в случае снижения тока, вырабатываемого солнечной батареей, менее минимально допустимого, либо при достижении наибольшей величины вырабатываемого тока в моменты окончания или начала следующего вращения - изменяют значение расчетного угла после окончания упомянутого следующего вращения на величину Δα=ωО·(tЗАП2-tЗАП1-0,5·ТСБ),
где Δα - поправка к расчетному углу; ωО - угловая орбитальная скорость космического аппарата; tЗАП1 - запомненное значение времени отсчета в момент формирования команды на прекращение вращения; tЗАП2 - запомненное значение времени отсчета на момент достижения вырабатываемым солнечной батареей током наибольшей величины; TСБ - период вращения солнечной батареи, увеличивают или уменьшают расчетный угол на величину поправки при вращении солнечной батареи во время отсчета времени соответственно в направлении увеличения или уменьшения угла.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2356788C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2361788C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2368547C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2368545C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| US 20080078885 A1, 03.04.2008 | |||
| Индукционаая тигельная печь | 1976 |
|
SU625111A1 |
| KR 0100341819 B1, 26.06.2002. | |||

