Способ управления положением солнечной батареи (СБ) относится к космической технике, а именно к системам электроснабжения космических аппаратов, и может быть применен при управлении положением солнечных батарей спутников, космических станций и других космических аппаратов (КА).
Наиболее близким техническим решением, принятым за прототип, является способ управления положением солнечной батареи, заключающийся в том, что измеряют текущее угловое положение солнечной батареи как направление нормали к рабочей поверхности солнечной батареи с точностью до дискретного сектора датчика угла, определяют заданное направление как проекцию единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, при наличии рассогласования между заданным направлением и текущим угловым положением солнечной батареи формируют команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота солнечной батареи в направлении его уменьшения, а в случае отсутствия рассогласования формируют команды на прекращение вращения солнечной батареи [1].
Недостатком известного способа является отсутствие контроля прекращения вращения СБ после формирования соответствующей команды, так как в процессе реализации известного способа возможно появление отказов, связанных с нарушениями в цепях управления или датчиков обратной связи, что приводит, в свою очередь, к неправильной ориентации СБ.
Технической задачей предлагаемого изобретения является расширение функциональных возможностей способа управления положением солнечной батареи путем введения контроля за отсутствием изменения положения СБ после достижения заданного угла.
Указанный технический результат достигается тем, что в известном способе управления положением солнечной батареи космического аппарата, заключающемся в том, что измеряют текущее угловое положение солнечной батареи как направление нормали к рабочей поверхности солнечной батареи с точностью до дискретного сектора датчика угла, одновременно определяют заданное направление как проекцию единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, при наличии рассогласования между заданным направлением и текущим угловым положением солнечной батареи формируют команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота солнечной батареи в направлении его уменьшения, а в случае отсутствия рассогласования формируют команды на прекращение вращения солнечной батареи, дополнительно задают постоянную угловую скорость вращения выходного вала устройства поворота солнечной батареи, превышающую на порядок и более угловую скорость вращения космического аппарата вокруг Земли, до начала управления определяют время и угол торможения солнечной батареи после выдачи команды на прекращение вращения до полной остановки солнечной батареи, определяют пороговое значение угла контроля как угловую величину менее угла 180 градусов и более суммы угла торможения и угловой величины одного дискретного сектора датчика угла, округленной в сторону увеличения до угловой величины целого числа дискретных секторов датчика угла, задают пороговое значение времени контроля как величину, равную отношению порогового значения угла контроля к угловой скорости вращения солнечной батареи, во время управления, после формирования команды на прекращение вращения запоминают текущее угловое положение солнечной батареи и измеряют текущее время контроля, при этом прекращают измерение текущего времени контроля и обнуляют его значение, если команда на вращение солнечной батареи по или против часовой стрелки поступает до момента достижения текущим временем контроля порогового значения, в момент достижения текущим временем контроля порогового значения измеряют текущее угловое положение солнечной батареи и сравнивают его с запомненным значением, в случае, если текущее угловое положение солнечной батареи отличается от запомненного на величину более порогового значения угла контроля, прекращают управление солнечной батареей и формируют сигнал отказа.
На чертеже представлены циклограммы управления положением солнечной батареи.
Предложенный способ управления положением солнечной батареи космического аппарата реализуется следующим образом.
Система управления положением СБ представляет собой бортовую вычислительную машину, которая формирует управляющие команды в устройство поворота СБ и осуществляет прием сигналов положения СБ. Устройство поворота СБ включает блок сопряжения и электромеханический привод с установленным на его выходном валу датчиком положения СБ. Определение направления на Солнце и формирование заданного угла обеспечивается алгоритмами системы управления движением. Используют устройство поворота солнечной батареи с постоянной угловой скоростью вращения выходного вала, на порядок и более превышающей угловую скорость вращения космического аппарата вокруг Земли:
где ωСБ - фиксированная угловая скорость СБ;
ωКА - фиксированная угловая скорость КА по орбите вокруг Земли.
Датчик утла, установленный на валу устройства поворота СБ, представляет собой круг, разбитый на n равных дискретных угловых секторов, при этом величина одного дискретного углового сектора составляет величину:
где σ - угловая величина одного дискретного сектора датчика угла;
n - количество дискретных секторов датчика угла в круге 360°.
Каждому i-тому дискретному угловому сектору, при i=0…n-l, однозначно соответствует интервал фактических угловых положений выходного вала устройства поворота СБ - от минимального до максимального значения. Датчик угла формирует номер дискретного углового сектора СБ, соответствующий положению СБ относительно корпуса КА.
При наличии рассогласования между заданным направлением и текущим угловым положением солнечной батареи система управления формирует команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота солнечной батареи в направлении его уменьшения, при отсутствии рассогласования формируется команда на прекращение вращения СБ, после чего осуществляется постепенное торможение угловой скорости СБ от фиксированной скорости ωСБ до нулевого значения. Угловое положение СБ изменяется при этом на угловую величину торможения αT, зафиксированную в паспортных данных устройства поворота СБ либо полученную по результатам эксперимента.
Перед началом управления положением СБ осуществляют следующие измерения. По паспортным данным либо по результатам эксперимента определяют фиксированную угловую скорость вращения солнечной батареи ωСБ, угол торможения αT и время торможения tT CB.
Учитывая, что максимально возможная величина угла рассогласования между заданным направлением и текущим угловым положением солнечной батареи составляет 180°, определяют пороговое значение угла контроля αПОР СБ как угловую величину менее угла 180° и более суммы угла торможения и угловой величины одного дискретного сектора датчика угла, округленной в сторону увеличения до угловой величины целого числа дискретных секторов датчика угла:
180°>αПОР>(αT+σ),
при αПОР = k·σ>(αT+σ),
где αПОР - пороговое значение угла контроля СБ;
αT - угол торможения СБ;
σ - угловая величина одного дискретного сектора датчика угла;
k - количество дискретных секторов датчика угла в пороговом значении угла контроля αПОР СБ.
Задают пороговое значение времени контроля как отношение порогового значения угла контроля к угловой скорости вращения солнечной батареи:
где tПОР - пороговое значение времени контроля;
αПОР - пороговое значение угла контроля СБ;
ωСБ - фиксированная угловая скорость СБ.
В процессе управления положением СБ измеряют текущее угловое положение солнечной батареи с точностью до i-того дискретного углового сектора датчика угла. При наличии рассогласования между текущим угловым положением солнечной батареи и заданным углом формируют команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота СБ, а в случае отсутствия рассогласования формируют команды на прекращение вращения СБ. В момент выдачи команды на прекращение вращения СБ начинают измерение текущего времени контроля tИЗМ и запоминают текущее угловое положение СБ, измеренное датчиком угла, с точностью до угловой величины дискретного сектора датчика угла, то есть:
αЗАП = αИЗМ1,
где αЗАП - запомненное угловое значение датчика угла на момент выдачи команды на прекращение вращения СБ;
αИЗМ1 - текущее угловое положение СБ, измеренное датчиком угла на
момент выдачи команды на прекращение вращения СБ.
Прекращают измерение текущего времени контроля и обнуляют его значение: tИЗМ=0, если команда на вращение солнечной батареи по или против часовой стрелки поступает до момента превышения текущим временем контроля порогового значения, то есть при
tИЗМ ≤ tПОР,
где tИЗМ - измеренное значение времени контроля;
tПОР - пороговое значение времени контроля.
С момента превышения временем контроля порогового значения, то есть при tИЗМ > tПОР, измеряют текущее угловое положение солнечной батареи, измеренное датчиком угла αИЗМ2, и сравнивают его с запомненным значением αЗАП.
Формируют сигнал отказа управления СБ UОТК в случае, если разность между текущим измеренным угловым положением, измеренным датчиком угла, αИЗМ2 СБ и запомненным значением αЗАП на момент сравнения отличается на величину более порогового значения угла контроля, то есть при:

или


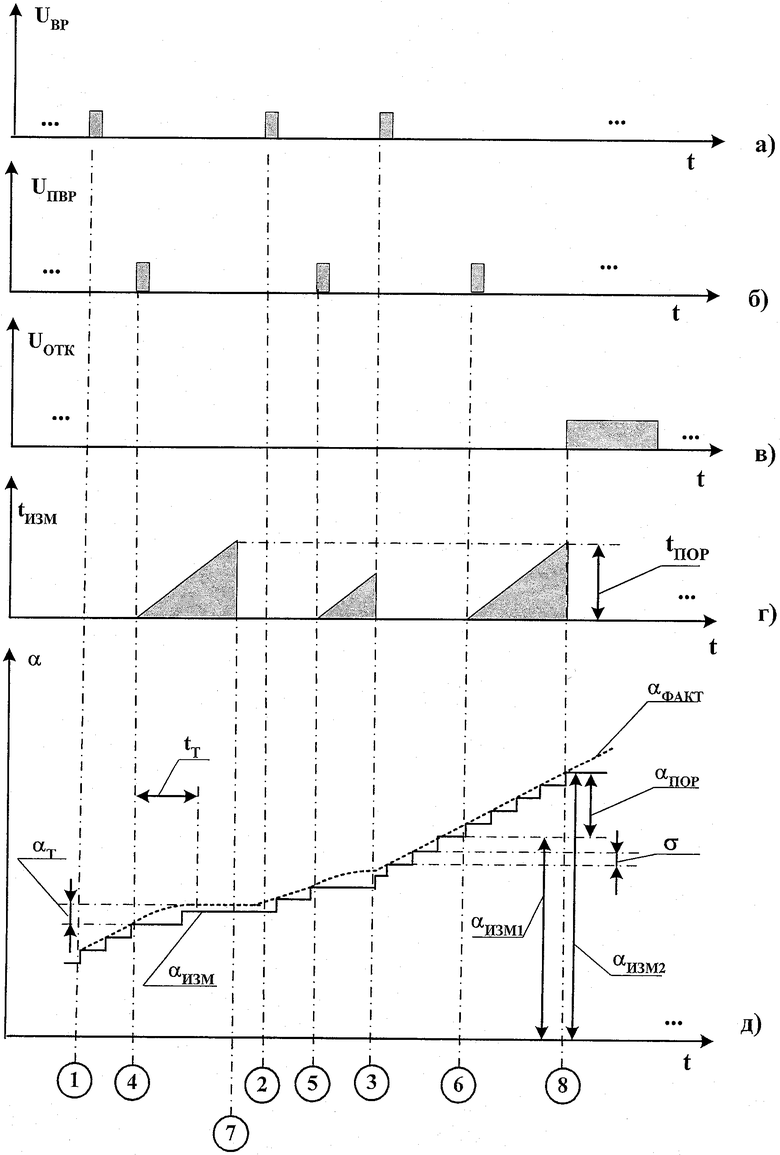
На чертеже представлены циклограммы управления положением солнечной батареи, где:
а), б) и в) - графики временной зависимости команд управления соответственно на вращение СБ - UВР, на прекращение вращения СБ - UПВР, на формирование сигнала отказа управления СБ - UОТК;
г) и д) - графики временной зависимости соответственно времени контроля tИЗМ, фактического углового положения СБ - αфакт и измеренного углового положения СБ - αИЗМ;
tПОР - пороговое значение времени контроля;
tИЗМ - измеренное значение времени контроля;
UВР - команды на вращение СБ;
UПВР - команды на прекращение вращения СБ;
UOТК - сигнал отказа управления СБ;
αИЗМ - текущее измеренное датчиком угла угловое положение СБ;
αИЗМ1 - измеренное датчиком угла угловое положение СБ на момент выдачи команды на прекращение вращения;
αИЗМ2 - измеренное датчиком угла угловое положение СБ на момент превышения времени контроля порогового значения;
αфакт - фактическое угловое положение СБ;
αПОР - пороговое значение угла контроля;
αT - угол торможения СБ;
σ - угловая величина одного дискретного сектора датчика угла.
На циклограммах управления в точках 1, 2, 3 формируются команды на вращение СБ, а в точках 4, 5, 6 - команды на прекращение вращения СБ, одновременно осуществляется запоминание измеренного углового положения СБ, то есть, например, для точки 6 αЗАП = αИЗМ1.
В точках 7, 8 осуществляется сравнение запомненного значения с текущим измеренным угловым положением СБ, одновременно осуществляется сброс времени контроля, то есть tИЗМ = 0.
В течение времени tТ от точки 4 осуществляется торможение СБ до полной остановки, при этом фактическое угловое положение СБ αфакт изменяется на угол не более угла торможения αT.
В точке 7, после достижения временем контроля порогового значения, то есть при
tИЗМ > tПОР, осуществляется сравнение запомненного и текущего значений датчика угла, при этом изменение углового положения СБ после формирования команды на прекращение вращения не превышает порогового значения угла контроля αПОР, и сигнал отказа UОТК не формируется.
В точке 3 команда на вращение выдается до достижения временем контроля порогового значения, то есть выполняется условие tИЗМ > tПОР, при этом измерение времени контроля прекращается, и его значение обнуляется, то есть tИЗМ = 0.
В точке 8, при tИЗМ > tПОР, после выдачи команды на прекращение вращения, СБ продолжает вращение, при этом текущее измеренное угловое положение СБ в этой точке отличается от запомненного в точке 6 на величину более порогового значения угла контроля, то есть выполняется условие  при этом формируется сигнал отказа UОТК, после чего может, например, осуществляться переключение управления СБ на резервный канал управления либо отключение управления СБ.
при этом формируется сигнал отказа UОТК, после чего может, например, осуществляться переключение управления СБ на резервный канал управления либо отключение управления СБ.
Определение рассогласования между заданным и текущим положением СБ после этого может осуществляться, например, по величине тока, вырабатываемого СБ в соответствии с формулой [1, стр.5]:
где αРАСС - текущее угловое рассогласование между нормалью к рабочей поверхности солнечной батареи и направлением на Солнце;
I - ток, вырабатываемый СБ;
Imax - максимально возможный ток, вырабатываемый СБ при вращении.
Предложенный способ позволяет своевременно обнаруживать отказы и сбои в цепях управления прекращением вращения солнечных батарей, а также датчиков угла, измеряющих положение солнечных батарей с точностью до дискретного углового сектора. В случае отказа прекращения вращения система управления СБ может переключить управление СБ на резервный канал управления, а случае отсутствия резервного канала управления последующее управление положением СБ может осуществляться, например, ориентацией положения КА относительно заданного угла при помощи двигателей орбитального маневрирования либо других средств управления ориентацией КА.
Источники информации
1. Патент РФ 2242408, кл. В64G 1/44, 24.03.2003 г.
Изобретение относится к системам электроснабжения космических аппаратов. Способ заключается в том, что измеряют текущее угловое положение солнечной батареи (СБ) и определяют заданное направление на Солнце. При наличии рассогласования между заданным направлением и текущим угловым положением СБ формируют команды на вращение СБ. При этом задают угловую скорость вращения выходного вала устройства поворота СБ, превышающую на порядок и более угловую скорость обращения космического аппарата вокруг Земли. До начала управления определяют время и угол торможения СБ от момента выдачи команды на прекращение вращения до полной остановки. Определяют пороговое значение угла контроля как угол, меньший 180 градусов и больший суммы угла торможения и угловой величины одного дискретного сектора датчика угла СБ. Задают пороговое значение времени контроля как отношение порогового значения угла контроля к угловой скорости вращения СБ. После формирования команды на прекращение вращения запоминают текущее угловое положение СБ и измеряют текущее время контроля. Прекращают измерение текущего времени контроля и обнуляют его значение, если команда на вращение СБ по или против часовой стрелки поступает до момента достижения текущим временем контроля порогового значения. В момент достижения текущим временем контроля порогового значения измеряют текущее угловое положение СБ и сравнивают его с запомненным значением. Если текущее угловое положение СБ отличается от запомненного на величину более порогового значения угла контроля, то прекращают управление СБ и формируют сигнал отказа. Техническим результатом изобретения является расширение функциональных возможностей способа управления путем введения контроля за отсутствием изменения положения СБ после достижения заданного угла. 1 ил.
Способ управления положением солнечной батареи космического аппарата, заключающийся в том, что измеряют текущее угловое положение солнечной батареи как направление нормали к ее рабочей поверхности с точностью до дискретного сектора датчика угла, одновременно определяют заданное направление как проекцию единичного вектора направления на Солнце на плоскость вращения указанной нормали к рабочей поверхности солнечной батареи, при наличии рассогласования между заданным направлением и текущим угловым положением солнечной батареи формируют команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота солнечной батареи в направлении его уменьшения, а в случае отсутствия рассогласования формируют команды на прекращение вращения солнечной батареи, отличающийся тем, что задают постоянную угловую скорость вращения выходного вала устройства поворота солнечной батареи, превышающую на порядок и более угловую скорость обращения космического аппарата вокруг Земли, до начала управления определяют время и угол торможения солнечной батареи от момента выдачи команды на прекращение вращения до полной остановки солнечной батареи, определяют пороговое значение угла контроля, как угловую величину менее 180° и более суммы угла торможения и угловой величины одного дискретного сектора датчика угла, округленной в сторону увеличения до угловой величины целого числа дискретных секторов датчика угла, задают пороговое значение времени контроля как величину, равную отношению порогового значения угла контроля к указанной угловой скорости вращения солнечной батареи, во время управления, после формирования команды на прекращение вращения запоминают текущее угловое положение солнечной батареи и измеряют текущее время контроля, причем прекращают измерение текущего времени контроля и обнуляют его значение, если команда на вращение солнечной батареи по или против часовой стрелки поступает до момента достижения текущим временем контроля порогового значения, в момент достижения текущим временем контроля порогового значения измеряют текущее угловое положение солнечной батареи и сравнивают его с запомненным значением, в случае, если текущее угловое положение солнечной батареи отличается от запомненного на величину более порогового значения угла контроля, прекращают управление солнечной батареей и формируют сигнал отказа.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
| US 6227497 A, 08.05.2001 | |||
| US 5653407 A, 05.08.1997 | |||
| US 5257759 A, 02.11.1993. | |||

