Способ управления положением солнечной батареи относится к космической технике, а именно к системам электроснабжения космических аппаратов, и может быть применен при управлении положением солнечных батарей спутников, космических станций и других космических аппаратов (КА).
Наиболее близким техническим решением, принятым за прототип, является способ управления положением солнечной батареи, заключающийся в том, что измеряют текущее угловое положение солнечной батареи как направление нормали к рабочей поверхности солнечной батареи, с точностью до дискретного сектора датчика угла, определяют заданное направление как проекцию единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, при наличии рассогласования между заданным направлением и текущим угловым положением солнечной батареи формируют команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота солнечной батареи в направлении его уменьшения, а в случае отсутствия рассогласования формируют команды на прекращение вращения солнечной батареи [1, стр.19-20].
В процессе функционирования систем управления СБ возможно появление отказов, связанных с нарушениями в цепях управления и датчиков обратной связи, измеряющих текущее угловое положение СБ, что приводит, к неправильной ориентации СБ. С целью выявления таких нарушений требуется обеспечивать контроль изменения положения СБ во время вращения.
Недостатком известного способа является отсутствие контроля за исполнением команд управления вращением СБ, так как в процессе реализации известного способа возможно появление отказов, связанных с нарушениями в цепях управления или датчика угла, а также связанных с воздействием внешних факторов, вызывающих, например, замедление скорости вращения СБ за счет механического торможения.
Технической задачей предлагаемого изобретения является расширение функциональных возможностей способа управления положением солнечной батареи путем введения контроля изменения углового положения солнечной батареи во время вращения.
Указанный технический результат достигается тем, что в известном способе управления положением солнечной батареи космического аппарата, заключающемся в том, что измеряют текущее угловое положение солнечной батареи как направление нормали к рабочей поверхности солнечной батареи с точностью до дискретного сектора датчика угла, одновременно определяют заданное направление как проекцию единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, при наличии рассогласования между заданным направлением и текущим угловым положением солнечной батареи формируют команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота солнечной батареи в направлении его уменьшения, а в случае отсутствия рассогласования формируют команды на прекращение вращения солнечной батареи, дополнительно задают постоянную угловую скорость вращения выходного вала устройства поворота солнечной батареи, превышающую на порядок и более угловую скорость вращения космического аппарата вокруг Земли, определяют время и угол разгона солнечной батареи с момента выдачи команды на вращение до установившегося фиксированного значения угловой скорости солнечной батареи, определяют время и угол торможения солнечной батареи после момента выдачи команды на прекращение вращения до полной остановки солнечной батареи, задают пороговое значение угла отпускания менее угла 45 градусов и более или равным углу 0 градусов, задают пороговое значение угла срабатывания не менее суммы углов разгона и отпускания и не более угла 45 градусов, формируют сигнал рассогласования, если угол между заданным и текущим углами солнечной батареи превышает порог срабатывания, прекращают формирование сигнала рассогласования, если во время вращения солнечной батареи величина угла рассогласования достигает величины менее порога отпускания или равна углу 0 градусов или если знак угла рассогласования на момент начала вращения не совпадает со знаком рассогласования на момент окончания вращения и при этом угол рассогласования не превышает порога срабатывания, задают пороговое значение времени контроля как отношение одного дискретного сектора датчика угла к усредненной скорости вращения солнечной батареи при разгоне и торможении, отсчитывают текущее время контроля после выдачи команды на вращение солнечной батареи, прекращают отсчет текущего времени контроля после выдачи команды на прекращение вращения, по окончании времени торможения сбрасывают текущее время контроля в момент смены направления вращения, а также в момент пересечения границы между дискретными секторами датчика угла, формируют команду на прекращение вращения и сигнал отказа по управлению устройства поворота солнечной батареи при превышении текущим временем контроля порогового значения времени контроля.
Для обеспечения в полете систем КА электроэнергией используется солнечная батарея (СБ), управление положением которой осуществляется таким образом, чтобы нормаль к рабочей поверхности солнечной батареи имела минимальный угол по отношению к направлению на Солнце.
Управление положением СБ обеспечивается автоматической системой управления, в состав которой входит устройство поворота СБ, выполненное на базе электромеханического привода с закрепленным на выходном валу датчиком угла, блок управления и бортовая вычислительная машина.
Данный способ позволяет обнаруживать отказы и сбои в цепях управления положением солнечных батарей, а также датчиков угла, измеряющих положение солнечных батарей с точностью до дискретного углового сектора.
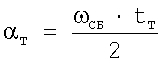
На фиг.1 представлено угловое положение нормали к рабочей поверхности СБ и проекция вектора заданного направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанной с КА системы координат, на фиг.2 представлена циклограмма разгона и торможения выходного вала устройства поворота СБ при формировании команд на вращение и прекращение вращения СБ, на фиг.3 представлена циклограмма управления положением солнечной батареи.
Система управления положением СБ представляет собой бортовую вычислительную машину, формирующую управляющие команды в устройство поворота СБ и осуществляющую прием сигналов положения СБ. Устройство поворота СБ включает блок сопряжения и электромеханический привод с установленным на его валу датчиком угла СБ. Определение направления на Солнце и формирование заданного угла обеспечивается алгоритмами системы управления движением. Датчик угла, установленный на выходном валу устройства поворота СБ, представляет собой круг, разбитый на равные дискретные угловые сектора, при этом величина одного дискретного сектора составляет величину:
где σ - угловая величина одного дискретного сектора датчика угла;
n - количество дискретных секторов датчика угла в круге 360°.
При изменении углового положения СБ относительно корпуса КА датчик угла формирует код, соответствующий номеру дискретного углового сектора, каждому из которых однозначно соответствует интервал фактических угловых положений электромеханического привода СБ. Таким образом, учитывая (1), измеренное текущее угловое значение датчика угла изменяется дискретно и может быть представлено в виде:

где αИЗМj - текущее измеренное угловое положение СБ, формируемое датчиком угла при угловом положении в j-том секторе;
j - текущий номер дискретного сектора датчика угла, при этом j=0…n-1, где n - количество дискретных угловых секторов.
Предложенный способ управления положением солнечной батареи космического аппарата реализуется следующим образом.
Во время вращения СБ измеряют ее текущее угловое положение αИЗМ относительно связанной с космическим аппаратом системы координат как направление нормали к рабочей поверхности СБ с точностью до дискретного сектора датчика угла. Определяют заданное направление как проекцию единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанной с космическим аппаратом системы координат. Формируют в устройство поворота команды на вращение по или против часовой стрелки относительно оси выходного вала устройства поворота СБ при наличии сигнала рассогласования между заданным направлением и текущим угловым положением СБ. Формируют в устройство поворота команды на прекращение вращения СБ при отсутствии сигнала рассогласования между заданным направлением и текущим угловым положением. Определяют угловую скорость вращения космического аппарата вокруг Земли ωКА. Используют устройство поворота СБ с постоянной угловой скоростью вращения ωСБ, на порядок и более превышающую угловую скорость вращения космического аппарата вокруг Земли:
 ,
,
где ωСБ - фиксированная угловая скорость СБ;
ωКА - фиксированная угловая скорость КА по орбите вокруг Земли.
Определяют время tp разгона и угол αр разгона СБ от момента выдачи команды на вращение в устройство поворота, соответственно как величины времени за которое и угла на который изменяется текущий угол СБ при увеличении угловой скорости СБ от нуля до установившегося фиксированного значения ωСБ.
Определяют время tT торможения и угол αT торможения СБ от момента выдачи команды на прекращение вращения в устройство поворота, соответственно как величины времени за которое и угла на который изменяется текущий угол солнечной батареи при уменьшении угловой скорости от установившегося фиксированного значения ωСБ до нуля.
Применяют для контроля вращения СБ датчик угла, закрепленный на оси выходного вала устройства поворота СБ, с равными дискретными угловыми секторами σ величиной более 0° и не более угла 90°, то есть:
0°<σ≤90°,
где σ - угловая величина одного дискретного сектора датчика угла.
Задают пороговое значение угла отпускания менее 45° и более или равного 0°:
45°>αОТП≥0°.
При использовании датчика угла с максимально возможными дискретными угловыми секторами σ величиной 90° СБ может устанавливаться точно в фиксированные положения на границы дискретных угловых секторов датчика угла, кратные 90°, при этом сигнал рассогласования формируется при рассогласовании между заданным направлением и текущим угловым положением СБ более 45°, с учетом этого задают пороговое значение угла срабатывания αСР:
(αP+αОТП)≤αСР≤45°,
где αP - угол разгона СБ;
αОПТ - порог отпускания СБ.
Формируют сигнал рассогласования UPAC, если угол между заданным и текущим углами СБ αРАС превышает порог срабатывания αСР:
αРАС>αСР.
Прекращают формирование сигнала рассогласования UPAC при выполнении одного из двух условий:
первое, если во время вращения СБ величина угла рассогласования αРАС достигает величины менее порога отпускания αОТП или равна 0° и знак угла рассогласования на момент начала вращения совпадает со знаком угла рассогласования на момент окончания вращения, то есть:

где αРАС - угол рассогласования между заданным и текущим углом СБ;
αОТП - порог отпускания;
αРАСН - величина угла рассогласования между заданным и текущим углом СБ на момент начала вращения;
αРАСО - величина угла рассогласования между заданным и текущим углом СБ на момент окончания вращения;
второе, если угол рассогласования на момент окончания вращения не превышает порога срабатывания и знак угла рассогласования на момент начала вращения не совпадает со знаком угла рассогласования на момент окончания вращения, то есть:

где αСР - угол срабатывания.
Определяют усредненную скорость вращения СБ ωУСБ при разгоне и торможении, как отношение суммы углов разгона и торможения к удвоенной сумме времен разгона и торможения, то есть:
 ,
,
где ωУСБ - усредненная угловая скорость вращения СБ при разгоне и торможении;
αP - угол разгона;
αT - угол торможения;
tP - время разгона;
tT - время торможения.
Определяют пороговое значение времени контроля tK как отношение одного дискретного сектора датчика угла к усредненной скорости вращения СБ при разгоне и торможении ωУСБ, то есть:
 ,
,
где tK - время контроля;
ωУСБ - усредненная угловая скорость вращения СБ при разгоне и торможении.
Отсчитывают время контроля tK после выдачи команды на вращение СБ UВР, прекращают отсчет времени контроля после выдачи команды на прекращение вращения СБ UПВР по окончании времени торможения tT, сбрасывают время контроля СБ перед началом управления, в момент смены направления вращения, а также в момент пересечения границы между дискретными угловыми секторами, то есть tK=0.
Формируют команду на прекращение вращения СБ UПВР и сигнал отказа по управлению устройства поворота солнечной батареи UОТК при превышении текущим временем контроля tK порогового значения времени контроля, то есть при tK>tПОР.
На фиг.1 представлено угловое положение нормали к рабочей поверхности СБ и проекция вектора заданного направления на Солнце относительно связанной с КА системы координат, где:
X, Y - оси рыскания и крена связанной системы координат КА;
ωСБ - направление фиксированной угловой скорости вращения СБ относительно связанной с КА системы координат;
1 - круг вращения СБ;
2 - проекция рабочей поверхности СБ на плоскость вращения нормали к рабочей поверхности СБ;
3 - направление излучения Солнца;
4 - направление проекции вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ;
5 - вектор направления нормали к рабочей поверхности СБ;
6 - угловой сектор датчика угла;
7 - биссектриса углового сектора датчика угла.
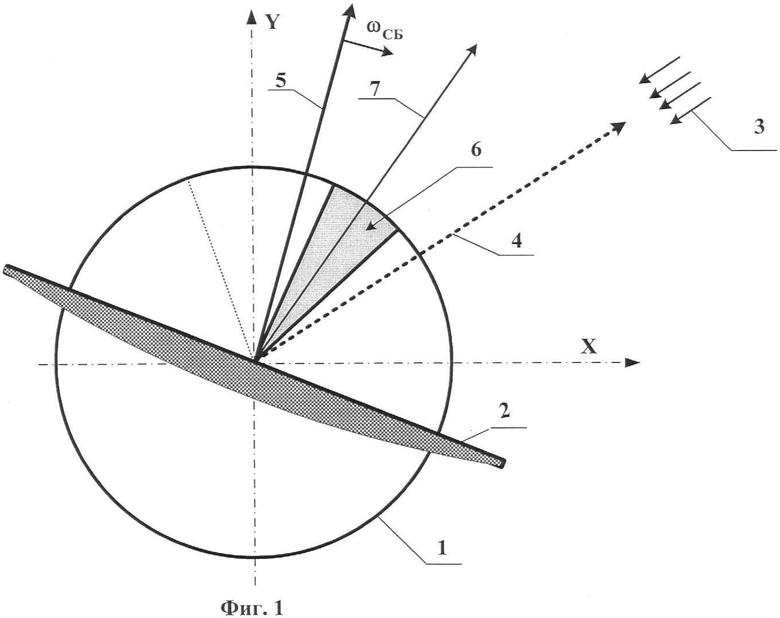
На фиг.2 представлена циклограмма разгона и торможения выходного вала устройства поворота СБ при формировании команд на вращение и прекращение вращения СБ, где:
а), б), в) - графики временной зависимости команд управления соответственно на вращение СБ - UВР, на прекращение вращения СБ - UПВР, сигнала движения СБ - UДВ;
г) - график временной зависимости угловой скорости СБ - ω, где:
ωСБ - фиксированная угловая скорость СБ;
tT - время разгона;
tT - время торможения.
В точке 8 формируется команда на вращение СБ, при этом в течение времени разгона от 8 до 9 точки осуществляется линейное увеличение угловой скорости СБ от 0 до фиксированного значения ωСБ. От точки 9 до точки 10 угловая скорость СБ имеет фиксированное значение ωСБ. В точке 10 формируется команда на прекращение вращения СБ и с точки 10 до точки 11 осуществляется линейное уменьшение угловой скорости СБ от фиксированного значения ωСБ до 0. Изменения углового положения СБ за время разгона и торможения, например, при линейном изменении скорости, составляют соответственно:
 ;
;
 ,
,
где αP - угол разгона;
αT - угол торможения;
ωСБ - фиксированная угловая скорость СБ;
tP - время разгона;
tT - время торможения.
От точки 8 до точки 11 формируется сигнал движения UДВ.
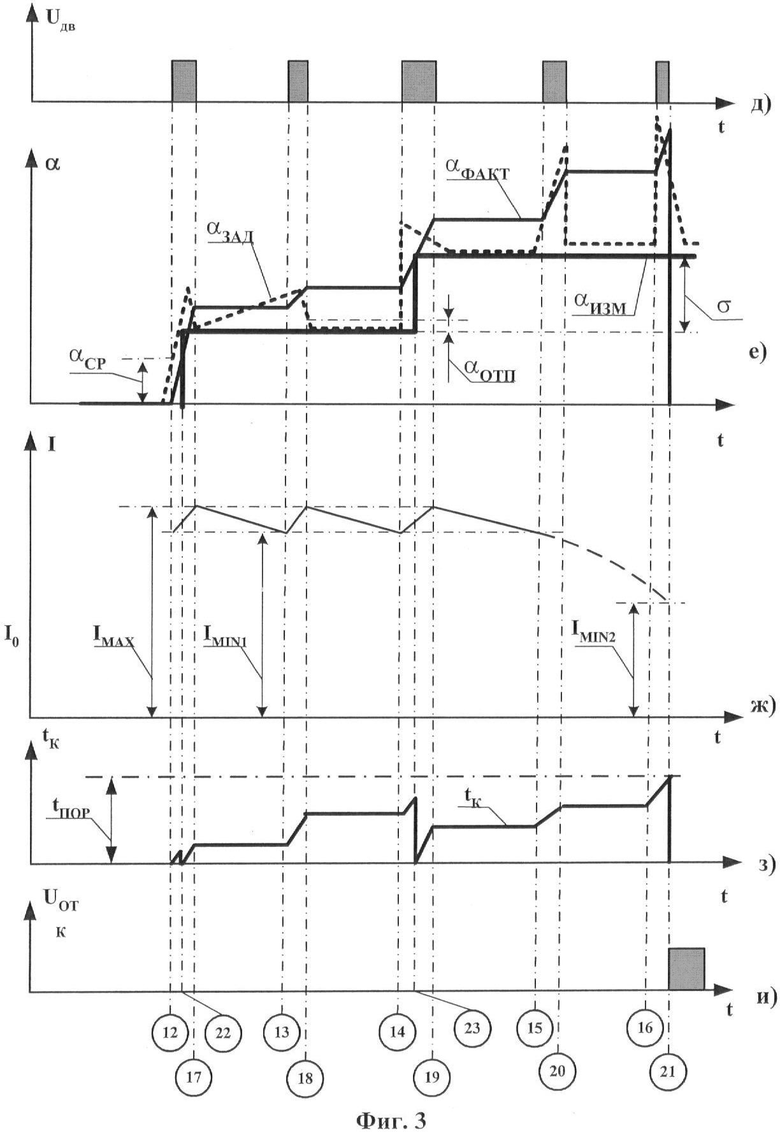
На фиг.3 представлены циклограммы управления положением солнечной батареи:
д) - формирования сигнала движения СБ UДВ;
е) - изменения заданного угла αЗАД (например, при маневрах КА на орбите), измеренного угла αИЗМ и фактического углового положения СБ αФАКТ в процессе управления положением СБ;
ж) - изменения времени контроля tK в процессе управления положением СБ;
з) - изменения тока I, формируемого СБ;
и) - формирования сигнала отказа UОТК.
В точках 12, 13, 14, 15, 16 циклограммы д) при рассогласовании фактического и заданного угла более порога срабатывания, показанного на циклограмме е), то есть при |αЗАД-αФАКТ|>αСР формируются команды на вращение СБ, при этом на циклограмме д) формируется сигнал наличия движения UДВ, а в точках 17, 18, 19, 20, 21 при рассогласовании фактического и заданного угла менее порога отпускания, то есть при |αЗАД-αФАКТ|<αОТП - команды на прекращение вращения СБ, при этом UДВ=0. На циклограмме е) показано изменение заданного αЗАД и фактического углового положения СБ αФАКТ, а также изменение значения угла αИЗМ.
При наличии вращения на интервалах 12-17, 13-18, 14-19, 15-20, 16-21 значение времени контроля tK изменяется, а в точках 22, 23 время контроля сбрасывается tK=0, так как угол αИЗМ изменяется на угловую величину одного дискретного сектора датчика угла σ.
На циклограмме ж) представлено изменение тока I, формируемого СБ в процессе управления, при этом ток изменяется от минимального значения IMIN1 в моменты начала вращения СБ и достигает максимального значения IMAX в моменты прекращения вращения СБ.
На циклограмме з) представлено изменение времени контроля tK в процессе управления СБ.
В точке 21 ток, формируемый СБ, представленный на циклограмме ж) достигает минимально допустимого значения IMIN2, время контроля при этом достигает и превышает пороговое значение, то есть tK>tПОР, при этом на циклограмме и) формируется сигнал отказа UОТК.
Предложенный способ позволяет своевременно обнаруживать отказы исполнения команд управления вращением СБ. В случае рассмотренного отказа система управления СБ может переключить управление СБ на резервный канал управления, если такой имеется. В случае отсутствия резервного канала управления СБ можно определить положение СБ относительно корпуса КА по величине тока, вырабатываемого СБ, путем изменения положения всего КА относительно Солнца. После этого разворот панели СБ в рабочее положение относительно заданного угла производить путем изменения положения всего КА, например, при помощи двигателей орбитального маневрирования.
Источники информации
1. Патент РФ 2242408, кл. B64G 1/44, 24.03.2003 г.
Изобретение относится к системам электроснабжения космических аппаратов. Способ заключается в том, что измеряют текущее угловое положение солнечной батареи (СБ) и, в случае рассогласования между ним и заданным направлением, формируют команды на вращение СБ. При отсутствии рассогласования формируют команды на прекращение вращения СБ. При этом задают постоянную, достаточно большую угловую скорость вращения выходного вала устройства поворота СБ. Определяют время и угол разгона СБ с момента выдачи команды на вращение до установившегося значения угловой скорости СБ. То же определяют для торможения СБ после выдачи команды на прекращение ее вращения. Задают порог отпускания менее 45° и не менее 0°. Задают порог срабатывания не менее суммы углов разгона и отпускания и не более 45°. Формируют сигнал рассогласования, если угол между заданным и текущим углами СБ превышает порог срабатывания. Прекращают формирование этого сигнала, если во время вращения СБ угол рассогласования будет менее порога отпускания или равен 0°. То же самое делают, если знак угла рассогласования на момент начала вращения не совпадает со знаком рассогласования на момент окончания вращения и при этом данный угол не превышает порога срабатывания. Задают пороговое значение времени контроля как отношение дискретного сектора датчика угла к усредненной скорости вращения СБ при разгоне и торможении. Контролируют время вращения СБ до команды на прекращение ее вращения. По окончании торможения сбрасывают текущее время контроля в моменты смены направления вращения и пересечения границы между дискретными секторами датчика угла. Формируют команду на прекращение вращения и сигнал отказа по управлению устройства поворота СБ при превышении текущим временем контроля порогового значения времени контроля. Техническим результатом изобретения является расширение функциональных возможностей способа управления положением солнечной батареи путем введения контроля изменения углового положения солнечной батареи во время вращения. 3 ил.
Способ управления положением солнечной батареи космического аппарата, заключающийся в том, что измеряют текущее угловое положение солнечной батареи как направление нормали к ее рабочей поверхности с точностью до дискретного сектора датчика угла, одновременно определяют заданное направление как проекцию единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, в случае рассогласования между заданным направлением и текущим угловым положением солнечной батареи формируют команды на вращение солнечной батареи относительно оси выходного вала устройства ее поворота по или против часовой стрелки в направлении уменьшения данного рассогласования, а в случае отсутствия рассогласования формируют команды на прекращение вращения солнечной батареи, отличающийся тем, что задают постоянную угловую скорость вращения указанного выходного вала, превышающую на порядок и более угловую скорость вращения космического аппарата вокруг Земли, определяют время и угол разгона солнечной батареи с момента выдачи команды на вращение до установившегося фиксированного значения угловой скорости солнечной батареи, определяют время и угол торможения солнечной батареи после момента выдачи команды на прекращение вращения до полной остановки солнечной батареи, задают угловой порог отпускания менее 45° и не менее 0°, задают угловой порог срабатывания не менее суммы углов разгона и отпускания и не более угла 45°, формируют сигнал рассогласования, если угол между заданным и текущим углами солнечной батареи превышает порог срабатывания, прекращают формирование сигнала рассогласования, если во время вращения солнечной батареи величина угла рассогласования достигает величины менее порога отпускания или равна 0°, или, если знак угла рассогласования на момент начала вращения не совпадает со знаком рассогласования на момент окончания вращения и при этом угол рассогласования не превышает порога срабатывания, задают пороговое значение времени контроля, как отношение одного дискретного сектора датчика угла к усредненной скорости вращения солнечной батареи при разгоне и торможении, отсчитывают текущее время контроля после выдачи команды на вращение солнечной батареи, прекращают отсчет текущего времени контроля после выдачи команды на прекращение вращения, по истечении времени торможения сбрасывают текущее время контроля в момент смены направления вращения и в момент пересечения границы между дискретными секторами датчика угла, формируют команду на прекращение вращения и сигнал отказа по управлению устройства поворота солнечной батареи при превышении текущим временем контроля указанного порогового значения времени контроля.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
| US 6227497 A, 08.05.2001 | |||
| US 5653407 A, 05.08.1997 | |||
| US 5257759 A, 02.11.1993. | |||

