Группа изобретений относится к способу определения координат объекта и устройству для его осуществления. Область применения охватывает системы технического зрения и может применяться для управления промышленным манипуляционным роботом, транспортными роботами, самолетами или суднами.
Известны и широко применяются различные способы и устройства определения координат объекта, содержащие датчики изображения (лазерные, телевизионные, радиолокационные), блоки памяти (для хранения эталонной информации) и вычислители координат [1, 2].
Существенным признаком этих способов и устройств является то, что формируется изображение объекта, которое анализируется согласно определенным методикам, алгоритмам или теоретическим моделям, а затем делается вывод местоположения объекта в рабочей зоне (сцене) [3].
Недостатки способов и устройств заключаются в низкой точности определения координат объекта и недостаточной функциональной способности (невозможность определять тип объекта, т.е. распознавать формы объекта).
Кроме этого, все эти аналоги не универсальны: не способны с высокой точностью определять тип, цвет и пространственные координаты объекта, а также они не помехоустойчивы.
В качестве прототипа рассмотрим способ для распознавания типа и определения координат объекта в рабочей зоне [4]. Этот способ характеризуется корреляционно-экстремальной обработкой информации и содержит датчик текущего изображения (ТИ), блок эталонных изображений (ЭИ) и анализатор взаимно-корреляционной функции (ВКФ), по виду и положению главного максимума которого делается вывод о типе и местоположении объекта в двухмерной рабочей зоне.
Недостатки способа и устройства заключаются, во-первых, в невозможности определять трехмерные (пространственные) координаты объекта, в невозможности распознавать цвет объекта, во-вторых, в отсутствии универсальности (невозможности использования для оценки местоположения объекта на плоскости и в пространстве) и, в-третьих, в отсутствии широкой функциональной возможности (применение в робототехнических системах, системах навигации транспортных средств и различных мехатронных системах).
Задачей является создание способа и устройства, повышающих функциональную возможность, точность и универсальность объекта.
Поставленная задача достигается тем, что, как и в известном способе, и в заявляемом способе освещают объект некогерентным источником света, получают эталонные и текущие изображения объекта, разнесенные между собой во времени, которые фильтруют, запоминают и увеличивают, затем оценивают тип и координаты объекта, для чего сравнивают изображения, совмещая их по масштабу при устранении угловых рассогласований изображений, при этом способ отличается тем, что получают цветные текущие и эталонные изображения, вводят два дополнительных канала освещения объекта и оценки цвета, типа и координат объекта и оценивают цвет, тип и пространственные координаты объекта.
Отличительными признаками предлагаемого способа от известного, наиболее близкого к нему, является то, что объект освещают тремя источникам света, считывают цветные телевизионные изображения в трех взаимно перпендикулярных направлениях и определяют тип, цвет и пространственные (трехмерные) координаты объекта по анализу и виду трех взаимно корреляционных функций, причем ЭИ формируется фотографированием или аналитическим конструированием (математическим моделированием) объекта.
Кроме того, текущие изображения объекта считываются с трех взаимно перпендикулярных плоскостей.
Кроме того, объект освещается в трех взаимно перпендикулярных областях.
Кроме того, сравнение эталонного и текущего изображений осуществляют при синхронном считывании трех цветных изображений объекта.
Кроме того, текущие изображения получают при изменении углов крена, тангажа и ракурса датчиков цветного телевизионного изображения.
Кроме того, эталонные изображения формируют путем фотографирования объекта цветной телевизионной камерой или путем аналитического моделирования объекта.
Кроме того, сравнение эталонного и текущего изображений осуществляется при синхронном вращении эталонных изображений вокруг оптической оси соответствующих накопителей текущих изображений и формирователей меры близости.
Кроме того, текущее изображение увеличивают на величину, определяемую разрешающей способностью оценки координат, типа и цвета объекта, а также скоростью его движения.
Предлагаемое устройство, содержащее последовательно соединенные блок управления освещением, осветитель, объект, датчик текущего изображения, накопитель текущего изображения, формирователь меры близости, анализатор меры близости, первым выходом подключенный через блок адаптации к второму входу датчика текущего изображения, а вторым выходом подключенный через последовательно соединенные блок хранения эталонных изображений и эталонное изображение, вторым входом соединенный с третьим выходом анализатора меры близости, к второму входу формирователя меры близости, отличается от известного тем, что оно дополнительно содержит последовательно соединенные второй дополнительный осветитель, объект, второй дополнительный датчик текущего изображения, второй дополнительный накопитель текущего изображения, второй дополнительный формирователь меры близости, вторым выходом подключенный к втором выходу эталонного изображения, второй дополнительный анализатор меры близости, блок связи и вычислитель, а также последовательно соединенные третий дополнительный осветитель, объект, третий дополнительный датчик текущего изображения, третий дополнительный накопитель текущего изображения, третий дополнительный формирователь меры близости, вторым входом соединенный с третьим выходом эталонного изображения, третий дополнительный анализатор меры близости и блок связи, третьим входом подключенный к анализатору меры близости, а вторым выходом к входу блока управления, причем дополнительные отдельные выходы блока адаптации соединены с отдельными входами второго дополнительного датчика текущего изображения и третьего дополнительного датчика текущего изображения, а два дополнительных выхода блока управления освещением соединены с входами второго и третьего дополнительных осветителей, причем выход вычислителя подключен к отдельному входу блока связи, дополнительный выход блока адаптации и синхронизации подключен к отдельному входу блока связи, дополнительные входы эталонного изображения подключены к выходам второго и третьего дополнительных анализаторов меры близости, а отдельные выходы накопителя текущего изображения, второго дополнительного накопителя текущего изображения и третьего дополнительного накопителя текущего изображения подключены к отдельным входам блока хранения эталонных изображений.
Кроме того, блок связи выполнен в виде беспроводной или проводной радиосвязи.
Кроме того, вычислитель выполнен в виде процессора, определяющего пространственные координаты объекта.
Кроме того, блок хранения эталонных изображений выполнен в виде многомерного запоминающего блока памяти.
Кроме того, осветитель выполнен в виде универсального блока, содержащего когерентный или некогерентный осветители.
Отличительными признаками предлагаемого устройства от указанного выше известного, наиболее близкого к нему, является то, что, во-первых, сформированы три канала считывания (восприятия) ТИ, формирования и анализа взаимно корреляционной функции, во-вторых, образованы три управляемые источника света, освещающие объект, в-третьих, введены блок связи с блоками устройства и вычислитель, обеспечивающий анализ информации и вычисляющий тип, цвет и трехмерные координаты объекта.
Заявленная группа изобретений соответствует требованию единства изобретения, т.к. один из объектов изобретения (а именно устройство) предназначен для осуществления функций другого заявленного объекта группы - способа определения координат объекта, и при этом оба объекта группы изобретений направлены на решение одной и той же задачи с получением единого технического результата.
Предлагаемый способ и устройство иллюстрируются чертежами, представленными на фиг.1 - фиг.3.
На фиг.1 дана структурная схема устройства.
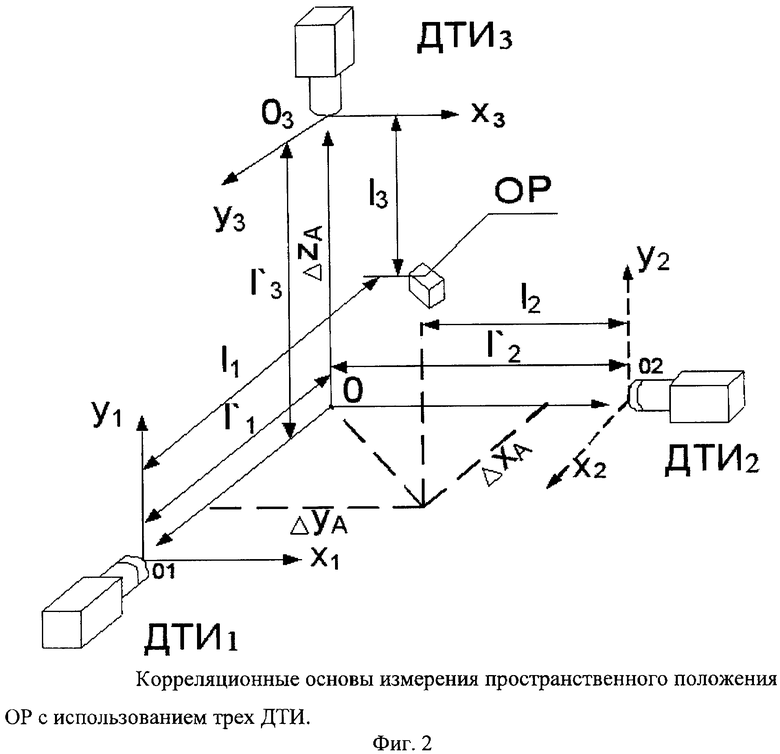
На фиг.2 представлены корреляционные основы измерения пространственного положения объекта распознавания (ОР) с использованием трех датчиков текущего изображения (ДТИ).
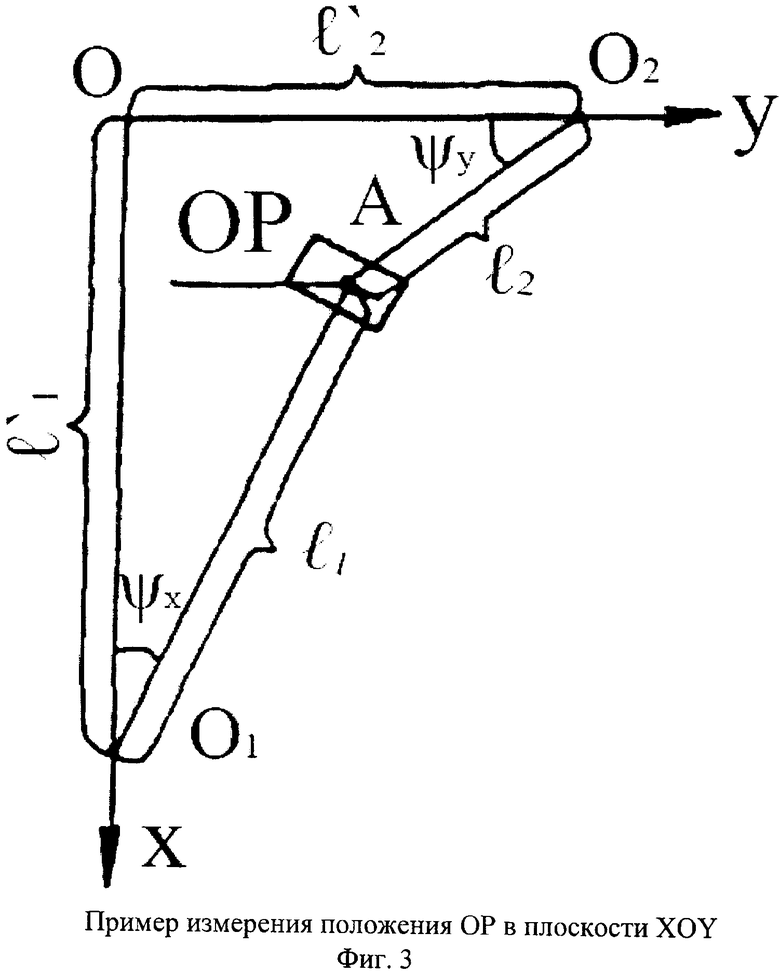
На фиг.3 приведен пример измерения положения ОР в плоскости ХОУ.
На фиг.1 даны следующие обозначения:
1 - объект;
2 - осветитель;
3 - второй дополнительный осветитель;
4 - третий дополнительный осветитель;
5 - блок управления освещением;
6 - датчик текущего изображения;
7 - второй дополнительный датчик текущего изображения;
8 - третий дополнительный датчик текущего изображения;
9 - накопитель текущего изображения;
10 - второй дополнительный накопитель текущего изображения;
11 - третий дополнительный накопитель текущего изображения;
12 - формирователь меры близости;
13 - второй дополнительный формирователь меры близости;
14 - третий дополнительный формирователь меры близости;
15 - анализатор меры близости;
16 - второй дополнительный анализатор меры близости;
17 - третий дополнительный анализатор меры близости;
18 - эталонное изображение;
19 - блок хранения эталонных изображений;
20 - блок связи;
21 - вычислитель;
22 - блок адаптации и синхронизации.
На фиг.1 показаны следующие связи:
(→) - электрические связи;
(--→) - оптические связи;
(-·-·→) - радиотехнические (беспроводные) связи.
Устройство работает в двух режимах: подготовка эталона и измерение (определение координат). В режиме подготовки эталона формируется цветное эталонное изображение объекта 1. Для этого по сигналу от блока адаптации и синхронизации (БАС) 22 включается через блок связи (БС) 20 и блок управления освещением (БУО) 5, осветитель 2, второй и третий дополнительные осветители 3, 4 (ВДО3, ТДО4), осуществляющие подсветку объекта 1. После этого по сигналу БАС 22 включаются датчик изображения 6 (ДТИ6), второй дополнительный датчик текущего изображения 7 (ВДДТИ7) и третий дополнительный датчик текущего изображения 8 (ТДДТИ8), считывающие текущее изображение (ТИ) объекта 1 и передающие его соответственно в накопитель ТИ9 (НТИ9), второй дополнительный накопитель ТИ10 (ВДНТИ9) и третий дополнительный накопитель текущего изображения 11 (ТДНТИ11). При этом ДТИ6, ВДДТИ7 и ТДДТИ8 совершают изменения по углам крена, тангажа и ракурса. Это обеспечивает считывание различных ТИ, запись ТИ через накопители 9, 10, 11 в блок хранения эталонных изображений 19 (ВХЭИ19). На этом заканчивается режим подготовки эталона (т.е. ЭИ). ЭИ может создаваться также путем математического моделирования (аналитического конструирования).
В режиме измерения (определения координат) устройство работает аналогично режиму подготовки эталона до момента записи ТИ в накопители 9, 10, 11. То есть в накопителях 9, 10, 11 формируются три ТИ, соответствующие текущим цветным изображениям объекта, снятым ДТИ6, ВДДТИ7 и ТДДТИ8 в трех взаимно перпендикулярных направлениях. После этого создаются три меры близости (взаимно корреляционные функции - ВКФ) с помощью формирователя меры близости 12 (ФМБ12), второго дополнительного формирователя меры близости 13 (ВДФМБ13) и третьего дополнительного формирователя меры близости 14 (ТДФМБ14), в которые кроме ТИ вводятся соответствующие ЭИ из блока хранения эталонных изображений 19 (БХЭИ19) через эталонное изображение 18 (ЭИ18). После этого анализатором меры близости 15 (АМБ15), вторым дополнительным анализатором меры близости 16 (ВДАМБ 16) и третьим дополнительным анализатором меры близости 17 (ТДАМБ17) определяются положение и вид ВКФ, значения которых пропорциональны координатам объекта в соответствующих плоскостях. Сигналы от АМБ15, ВДАМБ 16 и ТДАМБ17 поступают через блок связи 20 (БС20) на вычислитель 21, который определяет пространственные координаты, тип и цвет объекта. На этом один цикл работы устройства заканчивается.
Рассмотрим вариант оценки положения объекта распознавания (ОР) при использовании трех ДТИ (см. фиг.2). Введем следующие системы координат: XOYZ - система координат, связанная с рабочей зоной; X1O1Y1Z1, Х2О2Y2Z2, X3O3Y3Z3 - системы координат, связанные соответственно с ДТИ1, ДТИ2, ДТИ3 (т.е. ДТИ6, ВДДТИ7 и ТДДТИ8 соответственно). Положение ОР (центр тяжести, то есть положение точки А) в этой системе координат определяется величинами ΔхА, ΔуА, ΔzА; введем следующие обозначения:l1, l2, l3 - расстояние от соответствующих ДТИ1, ДТИ2, ДТИ3 до ОР;  ,
, ,
, - расстояние от ДТИ1, ДТИ2, ДТИ3 до соответствующих осей координат.
- расстояние от ДТИ1, ДТИ2, ДТИ3 до соответствующих осей координат.
В общем виде положение ОР можно определить по анализу трех ВКФ, описываемых следующими выражениями:
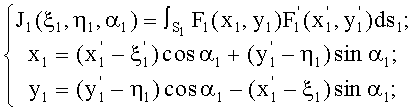
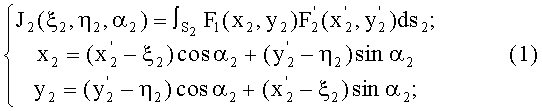
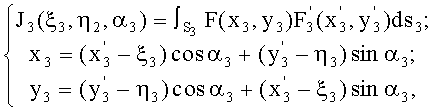
где F1(x1,y1), F1(x2,y2), F1(х3,y3) - ТИ, формируемые соответствующими ДТИ1, ДТИ2, ДТИ3;  ,
,  ,
,  - ЭИ, подготовленные при съемке соответствующими ДТИ1, ДТИ2, ДТИ3; S1, S2, S3 - площади коррелируемых изображений. Следует отметить, что при совмещении ТИ и ЭИ не только по угловой и линейным координатам, но и по масштабу выражения (1) еще более усложняются.
- ЭИ, подготовленные при съемке соответствующими ДТИ1, ДТИ2, ДТИ3; S1, S2, S3 - площади коррелируемых изображений. Следует отметить, что при совмещении ТИ и ЭИ не только по угловой и линейным координатам, но и по масштабу выражения (1) еще более усложняются.
Рассмотрим особенности оценки местоположения объекта при использовании различного числа и комбинации ДТИ. Например, если используются три датчика ТИ (ДТИ расположены так, как показаны на фиг.2), то координаты ОР определяются
ΔXА=Δξ2=Δξ3, ΔYА=Δξ1=Δξ3, ΔZА=Δη1=Δη2. (2)
Если применяются только два ДТИ (ДТИ1 и ДТИ2), то координаты ОР находятся
ΔХА=Δη2; ΔYА=Δξ1; ΔZА=Δη1=Δη2. (3)
При оценке предлагаемым устройством величин только по одной координате, например Δξ1, Δη1, Δη2, искомые координаты из (2) определяются просто
ΔXА=Δη3; ΔYА=Δξ1; ΔZА=Δη1=Δη2. (4)
При использовании двух других (ДТИ1 и ДТИ3) искомые координаты определяются следующим образом:
ΔXА=Δη3; ΔYА=Δξ1=Δξ3; ΔZА=Δη1. (5)
Если определяются устройством только величины Δη1, Δξ2, Δξ3, то выражение (4) упрощается до вида
ΔХА=Δη3; ΔYА=Δξ3; ΔZА=Δη1. (6)
В случае использования ДТИ2 и ДТИ3 координаты ОР находятся
ΔXА=Δξ2=Δη3; ΔYА=Δξ3; ΔZА=Δη2. (7)
В формулах (3), (4), (5) Δξ1, Δξ2, Δξ3, Δη1, Δη2, Δη3 представляют собой координаты главного максимума соответствующих ВКФ.
Расстояния l1, l2, l3 ОР определяются следующими выражениями (фиг.3):
 ;
; ;
; ;
;
 ;
; ;
; , (8)
, (8)
где Ψx, Ψy, Ψz - угол между направлением на и соответствующими осями системы координат XOYZ (на фиг.3 не показаны). Причем
l1~ΔМy, l2~ΔМ, l3~Мx,
где ~ - знак пропорциональности; ΔМy, ΔМz, ΔМx - изменение масштаба ВКФ, пропорциональное изменению ТИ относительно исходного ЭИ.
Таким образом, в соответствии с формулами (1)-(8) работает вычислитель 21, который также определяет цвет объекта в соответствии со следующим решающим правилом (9):
 ;
;
 ;
;

 ;
;
 ;
;
 ;
;
 ,
,
где Jк, Jз, Jс, Jп, Jж, Jг, Jб - соответственно уровни ВКФ красного, зеленого, синего, пурпурного, желтого, голубого и белого цветов.
Варианты исполнения всех блоков устройства приведены в [1, 3, 4].
По сравнению с известными, предполагаемые способ и устройство обладают более высокими характеристиками, помехоустойчивостью, функциональной возможностью и универсальностью. Эти характеристики взаимосвязаны.
Покажем это на примере работы устройства.
Высокие точностные характеристики предлагаемого устройства обеспечиваются наличием цветных изображений, позволяющих распознать не только тип (форму), но цвет объекта. Кроме этого обеспечиваются высокие точностные характеристики за счет возможности определения трехмерных координат объекта. Высокая помехоустойчивость также достигается за счет использования цветных изображений (это гарантирует распознавание цветных объектов).
Функциональные возможности повышаются за счет того, что предлагаемое устройство можно применять в робототехнических системах, мехатронных системах и системах навигации.
Высокая универсальность обеспечивается путем определения предлагаемым устройством не только двухмерных координат, но и трехмерных координат объекта.
Источники информации
1. Сырямкин В.И., Титов B.C., Якушенков Ю.Г. и др. Системы технического зрения: Справочник. - Томск: МГП «РАСКО», 1992. - 367 с. (с.192-275).
2. Гридин В.Н., Титов B.C., Фруфанов М.И. Адаптивные системы технического зрения. - М.: Наука, 2009. - 441 с. (с.350-393).
3. Мошкин В.И. и др. Техническое зрение роботов. - М.: Машиностроение, 1990. - 272 с. (с.229-260).
4. Кориков A.M., Сырямкин В.И., Титов B.C. Корреляционные зрительные системы роботов. - Томск: Радио и связь. Томское отделение, 1990. - 264 с. (с.20, рис.1.4).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ЦВЕТА ОБЪЕКТА | 1998 |
|
RU2142144C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| Устройство для определения координат объекта манипулирования в рабочей зоне робота | 1990 |
|
SU1740150A1 |
| Анализатор цветного зрения | 1980 |
|
SU950304A1 |
| Устройство для распознавания и определения координат объекта манипулирования в рабочей зоне робота | 1985 |
|
SU1370639A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ОРГАНОВ ЧЕЛОВЕКА ИЛИ ЖИВОТНОГО И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2429779C2 |
| СПОСОБ ИЗМЕРЕНИЯ БЫСТРЫХ ДВИЖЕНИЙ ГЛАЗ И ОТКЛОНЕНИЙ БИНОКУЛЯРНОГО ЗРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2352244C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
Группа изобретений относится к способу определения координат объекта и устройству для его осуществления. Согласно способу объект освещают некогерентным источником света, получают цветные эталонные и текущие изображения объекта, разнесенные между собой во времени, которые фильтруют, запоминают и увеличивают. Изображения сравнивают, совмещая их по масштабу при устранении угловых рассогласований изображений. Вводят два дополнительных канала освещения объекта и оценки цвета, типа и координат объекта и оценивают цвет, тип и пространственные координаты объекта. Технический результат - повышение точности определения координат, обеспечение возможности определения типа и цвета объекта. 2 н. и 11 з.п. ф-лы, 3 ил.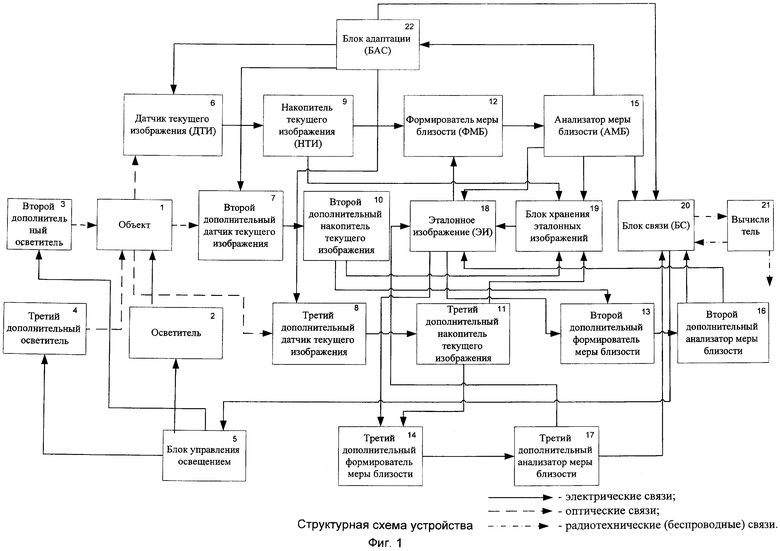
1. Способ определения координат объекта, заключающийся в том, что освещают объект некогерентным источником света, получают эталонные и текущие изображения объекта, разнесенные между собой во времени, которые фильтруют, запоминают и увеличивают, затем оценивают тип и координаты объекта, для чего сравнивают изображения, совмещая их по масштабу при устранении угловых рассогласований изображений, отличающийся тем, что получают цветные текущие и эталонные изображения, вводят два дополнительных канала освещения объекта и оценки цвета, типа и координат объекта и оценивают цвет, тип и пространственные координаты объекта.
2. Способ по п.1, отличающийся тем, что цветные текущие изображения объекта считываются с трех взаимно-перпендикулярных плоскостей.
3. Способ по п.1, отличающийся тем, что объект освещается в трех взаимно-перпендикулярных областях.
4. Способ по п.1, отличающийся тем, что сравнение эталонного и текущего изображений осуществляют при синхронном считывании трех цветных изображений объекта.
5. Способ по п.1, отличающийся тем, что текущие изображения получают при изменении углов крена, тангажа и ракурса датчиков цветного телевизионного изображения.
6. Способ по п.1, отличающийся тем, что эталонные изображения формируют путем фотографирования объекта цветной телевизионной камерой или путем аналитического моделирования объекта.
7. Способ по п.1, отличающийся тем, что сравнение эталонного и текущего изображений осуществляется при синхронном вращении эталонных изображений вокруг оптической оси соответствующих накопителей текущих изображений и формирователей меры близости.
8. Способ по п.1, отличающийся тем, что текущее изображение увеличивают на величину, определяемую разрешающей способностью оценки координат, типа и цвета объекта, а так же скоростью его движения.
9. Устройство для определения координат, содержащее последовательно соединенные блок управления освещением, осветитель, объект, датчик текущего изображения, накопитель текущего изображения, формирователь меры близости, анализатор меры близости, первым выходом подключенный через блок адаптации к второму входу датчика текущего изображения, а вторым выходом подключенный через последовательно соединенные блок хранения эталонных изображений и эталонное изображение, вторым входом соединенный с третьим выходом анализатора меры близости, к второму входу формирователя меры близости, отличающееся тем, что оно дополнительно содержит последовательно соединенные второй дополнительный осветитель, объект, второй дополнительный датчик текущего изображения, второй дополнительный накопитель текущего изображения, второй дополнительный формирователь меры близости, вторым выходом подключенный к второму выходу эталонного изображения, второй дополнительный анализатор меры близости, блок связи и вычислитель, а также последовательно соединенные третий дополнительный осветитель, объект, третий дополнительный датчик текущего изображения, третий дополнительный накопитель текущего изображения, третий дополнительный формирователь меры близости, вторым входом соединенный с третьим выходом эталонного изображения, третий дополнительный анализатор меры близости и блок связи, третьим входом подключенный к анализатору меры близости, а вторым выходом к входу блока управления, причем дополнительные отдельные выходы блока адаптации соединены с отдельными входами второго дополнительного датчика текущего изображения и третьего дополнительного датчика текущего изображения, а два дополнительных выхода блока управления освещением соединены с входами второго и третьего дополнительных осветителей, причем выход вычислителя подключен к отдельному входу блока связи, дополнительный выход блока адаптации и синхронизации подключен к отдельному входу блока связи, дополнительные входы эталонного изображения подключены к выходам второго и третьего дополнительных анализаторов меры близости, а отдельные выходы накопителя текущего изображения, второго дополнительного накопителя текущего изображения и третьего дополнительного накопителя текущего изображения подключены к отдельным входам блока хранения эталонных изображений.
10. Устройств по п.9, отличающееся тем, что блок связи выполнен в виде беспроводной или проводной радиосвязи.
11. Устройство по п.9, отличающееся тем, что вычислитель выполнен в виде процессора, определяющего пространственные координаты объекта.
12. Устройство по п.9, отличающееся тем, что блок хранения эталонных изображений выполнен в виде многомерного запоминающего блока памяти.
13. Устройство по п.9, отличающееся тем, что осветитель выполнен в виде универсального блока, содержащего когерентный или некогерентный осветители.
| Кориков А.М | |||
| и др | |||
| Корреляционные зрительные системы роботов | |||
| - Томск: Радио и связь, 1990 | |||
| Сырямкин В.И., Титов В.С | |||
| Системы технического зрения | |||
| - Томск: МГП «РАСКО», 1993 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| JP 2007120993 А, 17.05.2007. | |||

