1 1
Изобретение относится к радиотехнике и может быть использовано при создании устройств, предназначенных для выработки зрительной информации робота.
Цель изобретения - повышение точности распознавания объекта манипулирования и точности определения координат.
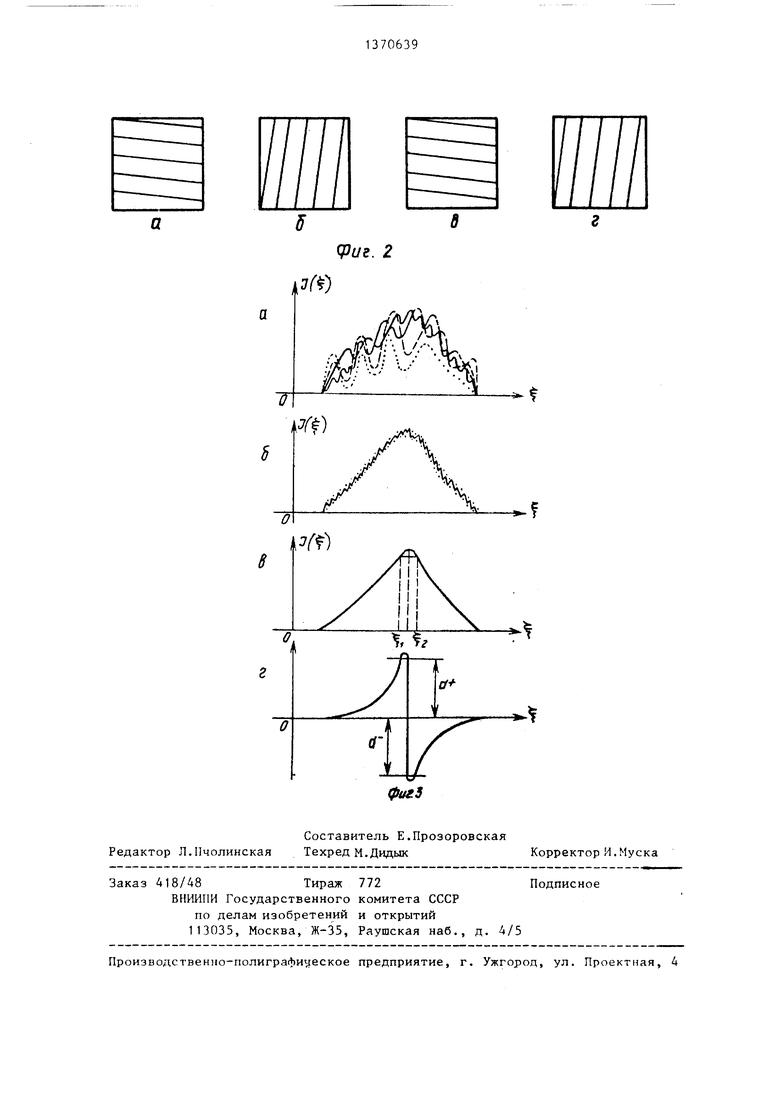
На фиг. 1 приведена функциональная электрическая схема предложенного устройстБа;на фиг. 2 - растры телевизионной передающей трубки; на фиг. 3 - сечения взаимно кО рреляци- онной функции (ВКФ), характеризующие работу блока фильтров, и вычислителя крутизны фронтов ВКФ.
Устройство содержит датчик 1 текущего изображения, преобразователь 2 электрического сигнала в оптический, оптический коррелятор 3, телеви зионная передающая трубка (ТГТ) А, блок 5 фильтров, блок 6 масштабирования, вычислитель 7 крутизны фронтов ВКФ,компаратор 8,электронный ключ 9,блок 10 определения линейных координат,генератор 1 1 опорного сигнала, блок 1 2 выделения максимума ВКФ, блок 1 3 определения угловой координаты,блок 1 4 разверток,коммутатор 15,механизм 16 вращения, блок 17 памяти эталонного изображения, синхронизатор 18 и механизм 19 смены кадров.
Устройство работает следующим образом.
Устройство работает циклически. Цикл системы осуществляется за пять оборотов блока 17: на первом обороте блока 17 производится запись текущего изображения (ТИ) на экране преобразователя 2, на втором и треть ем оборотах блока 17 определяется координата & X, на четвертом и пятом оборотах блока 17 определяется координата lY (где ЛХ, ЛУ - оценки координат объекта манипулирования (ОМ), определяемые устройством); при чем угол di оценивается на любом из 2-5 оборотов блока 17.На очередном цикле работы устройства датчик 1 воспринимается ТИ и на экране преобразователя 2 воспроизводится ТИ ОМ, которое вместе с эталонным изображением блока 17 вводится в оптический коррелятор 3, формирующий ВКФ ТИ и ЭЙ. Поворот ЭЙ блока 17 вокруг оптической оси коррелятора 3 осуществляется с помощью механизма
706392
16. ТПТ 4, содержащая фокусирующе- отклоняющую систему, преобразует оптическое изображение ВКФ в последовательность электрических сигналов, С ТПТ 4 снимается видеосигнал, амплитуда которого пропорциональна относительному угловому развороту ТИ и ЭЙ, а положение наибольшего
0 значения сигнала при строчно-кадро- вом считывании пропорционально линейному смещению ТИ относительно ЭЙ, Строчно-кадровая развертка формируется блоком 14, Для фильтрации видео15 сигнала служит блок 5, состоящий из последовательно соединенных полосового и режекторного фильтров и фильтра низкой частоты. Фильтрация высокочастотной помехи производится по2Q лосовым и режекторным фильтрами, а выделение низкочастотной огибающей сигнала - фильтром низкой частоты. Отфильтрованный видеосигнал поступает на блок 12, вырабатывающий им25 пульс сравнения при выполнении условия :
Y(§,M) F,(Y,, Y) РЗ (Х, Y,) dS;
X, (X, - ) cos и/. - (v -/)-,) sin а ; ;(1)
30
35
м
COS d,
(X, - Л р sin й + (Y, )
0
5
где F,(X,, Y,),
Т(Х , Y) - функции ,описывающие ТИ и ЭЙ в системах координат , и , связанных с ТИ и ЭЙ;
S - площадь сравниваемых изображений; Y (й , Лч) - взаимно корреляционная функция.
Сравнение видеосигналов производится за текущий и предьщу(ций обороты ЭЙ блока 17 вокруг оптической оси коррелятора, Цри этом растр ТПТ 4 поворачивается с помощью коммутатора 15 на угол d. после четных оборотов ЭЙ блока 17, а после нечетных оборотов ЭЙ блока 17 растр возвращается в прежнее: угловое положение. Блок 10 определяет линейные координаты съема значений пилообразных
0
напряжений с Гхпока 14, соответствующие линейным координатам /1 f , Л 4 точки наибольшей осветцсинос ги на i)o- токатоде ТПТ 4.За счет поворота
растра на угол
у обеспечивается
высокая вероятность правильного раз- познавания и одинаковая погрешность оценки смещений по каждой координате. Так как для обеспечения распознавания необходимо осуществить сравнение значений кpyтизF ы обоих фронтов сечений ВКФ по оси абсцисс и оси ординат (т.е. обеспечить сравнение характеристик ОМ по обеим осям системы координат XOY, связанной с рабочей зоной). Поэтому съем видеосигнала (т.е. ВКФ) производится с помощью блока 14, с которого также С))имаются позиционные координаты ОМ. Съем указанных сигна
лов с блока 14 вызван такжр тем,что добавление операции распознавания вызывает повышение скорости считывания ВКФ телевизионной передающей трубкой, имеющей предел скоростных характеристик, определяющихся частотными параметрами строчно-кадровой развертки трубки. Отфильтрованный от помех сигнал с выхода блока 5 поступает на вход блока 6.
С выхода этого блока 6 сигнал поступает через вычислитель 7 на компаратор 8, сравнивающий текущее значе- ние крутизны фронтов сечения ВКФ с эталонным значением, поступающим с генератора 11. Эталонное значение сигнала в генераторе 11 устанавливается для каждого ОМ, формирующего конкретный вид ВКФ. Вычислитель 7, компаратор 8 и генератор 11 реализуют следующее решающее правило:
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 1990 |
|
SU1823773A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ЦВЕТА ОБЪЕКТА | 1998 |
|
RU2142144C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| Устройство корреляционного зрения робота | 1990 |
|
SU1770120A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для определения координат объекта манипулирования в рабочей зоне робота | 1990 |
|
SU1740150A1 |
| Устройство для распознавания образов | 1980 |
|
SU949666A2 |
| Телевизионный автокоррелятор | 1977 |
|
SU705477A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2003 |
|
RU2243591C1 |
Изобретение относится к радиотехнике и м.б. использовано при создании устр-в, предназначенных для выработки зрительной информсчции робота. Цель изобретения - повышение распознавания объекта манипулирования и точности определения координат. Устр-во содержит датчик 1 текущего изображения, преобразователь -2 электрического сигнала в оптический,коррелятор 3, телевизионная передающая трубка 4,блок 10 определения линейных координат, блок 12 выделения максимума взаимно-корреляционной функции, блок 13 определения угловой координаты, блок 14 разверток, механизм вращения, блок 17 памяти эталонного изображения,синхро1П1затор 18, Для достижения цели в устр-во введены блок 5 фильтров,блок 6 масштабирования, вычислитель 7 крутизны фронтов взаимно корреляционной функции,компаратор 8, генератор опорного сигнала 11, электронный ключ 9, коммутатор 15, механизм 15 смены кадров.3 ил. (Л со о 05 со со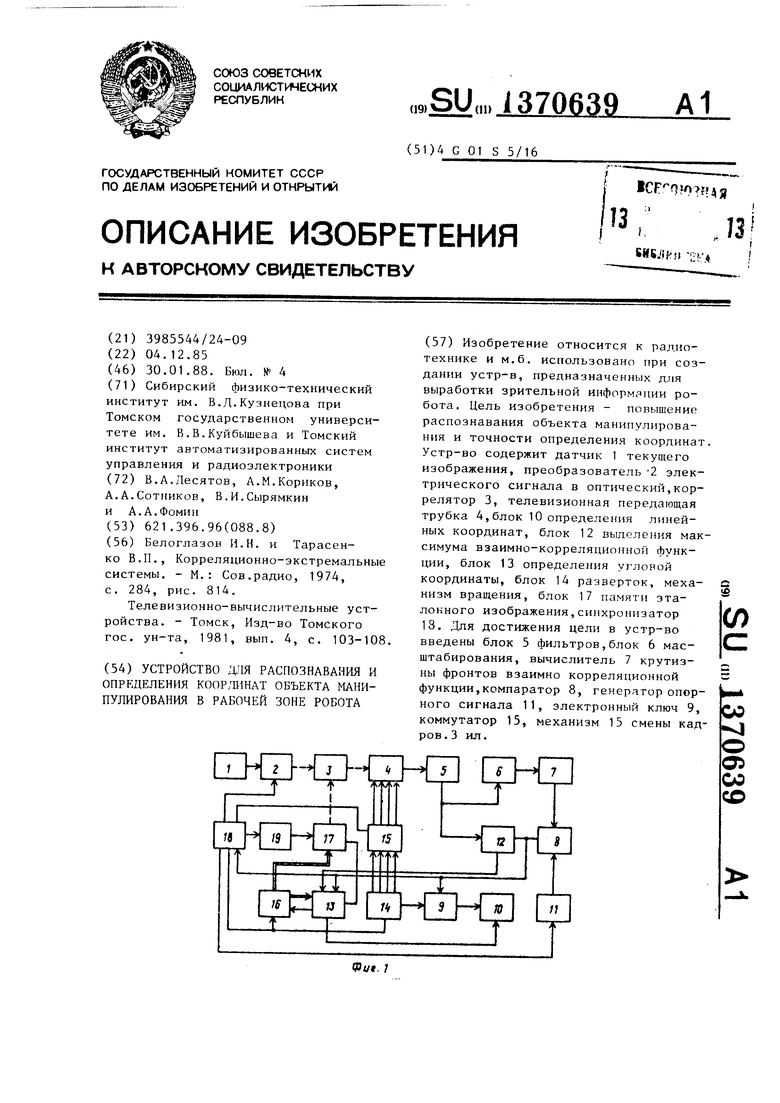
di,r,)
df
d( n, f, . )
7/ d г
- + 4 i
L 1 If
де d;
сигналы, пропорциональные крутизне переднего и заднего фронтов сечения ВКФ по оси Of в точках, соответствующих отклонению от наибольшего значения ВКФ на величину + сигналы, пропорциональные крутизне переднего и заднего фронтов сечения ВКФ
по оси
О
1
в точках, соответствующих отклонению от наибольшего значения ВКФ на величину t j . После сравнения сигналов, характеризующих крутизну фронтов сечения ВКФ по осям абсцисс (Of) и ординат (0ц), компаратор В вырабатывает последовательно импульс сравнения, переводящий электронный ключ 9 в состояние , пропускающее сигналы с блоЭ(-г, ) d1
7/dl- J, 15
0
5
0
5
ка 14 на вход блока 10. Если не выполняется условие (2), то механизм 19 обеспечивает последовательную смену ЭЙ блока 17 до его выполнения. Если не вьтолняется условие (1),то механизм 16 обеспечивает последовательную смену ЭЙ блока 17 до выполнения условия (2).Управление работой механизма смены 19 осуществляется по сигналу от синхронизатора 18, использующего информа1 ию от компаратора 8. На этом один цикл работы устройства заканчивается.Следующий цикл начинается снова по сигналу от синхронизатора 18. Решающее правило (2) невозможно реализовать, если не обеспечены поворот растра ТПТ 4 (коммутатором 15) и фильтрация помех ВКФ (блоком фильтров 5).
На фиг. 2 показаны ориентации растров на втором (а), тррт,ем (б), четвертом (в) и пятом (г) оборотах ЭЙ блока 17. .линиями показаны расположения строк кажлоу-о кадра развертки. Для npocToTi i показано
5п
всего 5 строк каждого кадра.Поворот растра ТИТ 4 осуществляется -эа счет соответствующей коммутации катушек L,, I,.,.
На фиг, 3 приведены сечения ВКФ, характеризующие работу блока 5 и вычислителя 7, который может быть выполнен в различных вариантах. Работа вычислителя 7 по первому варианту основывается на том, что амплитуды положительного и отрицательного сигналов продифференцированного сигнала пропорциональны крутизне фронтов входного сиг-нала. Второй вариант может быть реализован следующим образом: запоминается сечение, соответствующее наибольшему значению ВКФ; оцениваются координаты наибольшего значения ВКФ; определяются величины J,, .1 , соответствующие отклонению от наибольшего значения ВКФ вычисляется крутизна фронтов ВКФ.На фиг. 3 показаны четыре сечения по оси О ВКФ, соответствующие развертке но строке ТПТ 4 (а) ,два сечения ВКФ,соответствующие развертке по кадру телевизионной гтередающей трубки 4 UiJi сечение по оси Of ВКФ, соответствующее развертке по кадру и снятое с выхода блока 5 (в), сечение по оси О я ВКФ сигнала (в), пропущенного через вычислитель 7. Обозначения на фиг. Зв, соответствуют выражению (2) .
Формула изобретения
Устройство для распознава ия и определения координат объекта манипулирования в рабочей зоне робота, содержащее последовательно соединенные датчик текущего изображения и преобразователь электрическсп о сигнала в оптический,вход синхронизации которого соединен с первым выходом синхронизатора, а выход оптически свя- з ан с входом телевизионной передающей труПки через оптический коррелятор, второй вх(1д которого оптически связан с выходом блока памяти эта- лонн1)го изображения, механически связанного с механизмом вращения, вход си |хрони ,)дии которого соединен с вторым нь хмдом синхронизатора и
0
5
0
5
0
Ь
0
5
0
ЗУ6
входом синхронизации Г)лока разве)- ток, блок определения у ловой координаты, первый выход к(5торого подключен к первому входу блока определения линейных координат, ныход блока выделения максимума взаимно корреляционной функции подключен к первому входу блока определения угловой координаты, отличающееся тем,что,с целью повышения точности распознавания манипулирования и точности определения координат, в него введены механивм смены кадров, последовательно соединенные блок фильтров, блок масштабирования, вычислитель крутизны фронтов взаимно корреляционной функции и компаратор,а также генератор опорного сигнала, электронный ключ и коммутатор при этом третий выход синхронизатора подключен к входу опорного сигнала, выход которого подключен к второму входу компаратора,выход которого подключен к первому входу электронного ключа,входу синхронизатора и второму входу блока определения угловой координаты, механически связанному с механизмом вращения, управляющий вход которого соединен с вторым выходом блока определения угло- рзой координаты, третий вход которого соединен с выходом блока памяти эталонного изображения, вход которого соединен с выходом механизма смены кадров, вход синхронизации которого соединен с четвертым выходом синхронизатора, пятый выход которого соединен с управляюпц1м входом коммутатора, четыре информационных входа которого соединены с четырьмя соответствующими выходами блока разверток, пятый выход которого подключен к второму входу электро})но1 о ключа, выход которого подключен к второму входу блока определения линейных координат, четыре выхода коммутатора подключены к соответствующим входам кадровой и строчной разверток телевизионной передающей трубки,выход которой подключен к входу блока фильтров, выход которого подключен к входу блока выделения максимума взаимно корреляционной функции.
| Белоглазов И.И | |||
| и Тарасен- ко В.П., Корреляционно-экстремальные системы | |||
| - М.: Сов.радио, 1974, с | |||
| СЧЕТНЫЙ ДИСК ДЛЯ РАСЧЕТА СОСТАВНЫХ ЧАСТЕЙ ПИЩИ | 1919 |
|
SU284A1 |
| Поглотительный сосуд для анализа газов | 1923 |
|
SU814A1 |
| Телевизионно-вычислительные устройства | |||
| - Томск, Изд-во Томского гос | |||
| ун-та, 1981, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
