1
Изобретение относится к радиотехнике и может быть использовано при создании устройств, предназначенных для выработки зрительной информации робота.
Известно устройство для визуализации рабочей зоны робота, содержащее оптический коррелятор, блок памяти, блоки управления и преобразования, фотоэлектрический преобразователь и привод I11.
Однако это устройство из-за невозможности контурного представления изображений имеет низкую точность.
Наиболее близким техническим решением к изобретению является устройство, содержащее последовательно соединенные датчик текущего изображения, формирователь контура объекта, коммутатор, накопитель информации, коррелятор, интегратор, блок умножения, вычислитель квадратного корня, блок деления и первый блок сравнения, второй вход которого подключен к первому выходу первого блока памяти, второй выход которого соединен со вторым входом коммутатора, подключенного третьим входом к Bta-f ходу датчика текущего изображения, а второй выход накопителя информации через оптический коррелятор соединен со вторым входом блока деления 2 .
Это устройство имеет низкую точность определения координат объекта при обычном и контурном изображениях объектов.
Цель изобретения - повышение точности устройства.
10
Цель достигается тем, что устройство содержит сумматор и последовательно соединенные второй блок памяти, блок следящей развертки, вычислитель радиуса кривизны участка конtS тура объекта, пороговый элемент и К.ШОЧ, а также последовательно соединенные задатчик сигналов смещения и второй блок сравнения, второй вход которого подключен к выходу блока
20 следящей развертки и четвертому входу коммутатора, а выход - ко второму входу ключа, выходом соединенного с пятым входом коммутатора, четвертый выход первого блока подключен ко второму входу порогового элемента, а пятый выход - к первому входу сумматора, второй вход которого соединен с выходом первого блока сравнения, а выход - с выходом устройства, пртчем вход второго блока памяти подключен к выходу формирователя контура объекта.
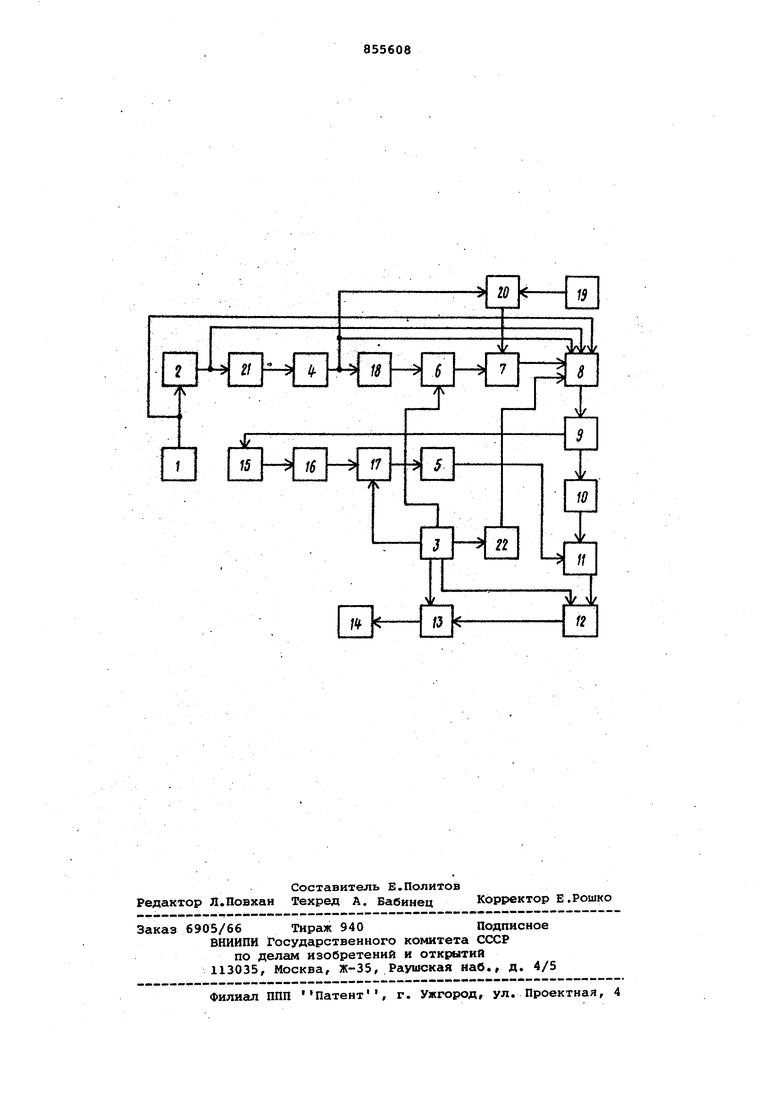
На чертеже представлена блок-схема устройства.
Устройство содержит датчик 1 текущей информации, формирователь 2 контура, первый блок 3 памяти, блок 4 следящей развертки, вычислитель 5 квгщратного корня, пороговый элемент 6, ключ 7, коммутатор 8, накопитель 9 информации, оптический коррелятор 10, блок 11 деления, первый блок 12 ограничения, сумматор 13, манипулятор 14, квадратор 15, интегратор 16, блок 17 умнржения, вычислитель 18 радиуса кривизны участка контура объекта, эгщатчик 19 сигналов смещения, второй блок 20 сравнения, второй блок 21 памяти, задатчик 22 сигналов .
Устройство работает следующим образом.
На очередном цикле работы устройства сигнал с датчика 1 текущего изобрс1жения поступает в формирователь 2 кбнтуров и в коммутатор В.. Формирователь 2 контуров формирует текущее изображение в виде контура детали. Сигнал с выхода формирователя 2 подается во второй блок 21 памяти, запоминающий текущее изображение на время, необходимое для представления изображения в виде совокупности точек. В качестве второго блока 21 памяти может быть использована запоминающая электронно-лучевая трубка. Блок 4 следящей развертки, осуществляя слежение за контуром изображения детали, выдает на входы вычислителя 18, .коммутатора 8 и второго блока 20 сравнения сигналы, соответствующие текущим координатам 4 и считывающего пятна (при обходе контура изображения) блока 21 следящей развертки, второй вычислитель 18 вычисляет радиус R кривизны К участка контура по формулам
/R/ /R/;K
11+(Л
при аналитическом задании участков контура в виде
у . f(x), где х ,у - координаты любой точки
контура в декартовой системе координат.
Сигнал, пропорциональны. модулю радиуса R кривизны участка контура, поступает с вычислителя 18 на вход порогового элемента б, на управляющий вход которого с первого блока 3 памяти подается сигнал, характеризующий выбранное максимально допустимое значение модуля радщса /Rg-/ кривизны участка контура для изображения
данной детали. При /R/ пороговый элемент 6 пропускает на функциональный вход ключа 7 сигнал, пропорциональный /R/. На управлякяций вход ключа 7 поступает информация второго блока 20 сравнения, сравнивающей значения текущих координат , /х/ , /у/ и предельно допустимых координат /Хр / и /Уо/ , поступающих соответственно с выходов блока 4 и Зсщатчика 19 сигналов смещения. Задатчик 19 задает допустимые значения I УО I смещений детали на плоское.ти конвейера (на сцене), т.е. определяет границы поля нахождения детали. При /х/ /Xp /Уо/ 7 /у/ сигнал с выхода блока 20 сравнения обес- печивает такое состояние ключа 7, .при котором информация с выхода порогового элемента 6 подается на вход коммутатора 8. Таким образом, если /R/ /Rg-/ или /х/ 7 , /у/ I Уд/ (это означает либо попадание
в йолё прения устройства другой детали, например, в виде круга,имеющей другие характеристики участка контура, либо исчезновение части детали из поля зрения устройства), то информация на коммутатор 8 не поступает - точка, соответствующая данному изгибу контура, не воспроизводится накопителем 9 информации. На основе априорной информации о размерах деталей (круглые, прямоугольные, треугольные и т.п.), хранящейся в блоке 3 памяти, в задатчике 22 сигналов управления формируется сигнал о состоянии коммутатора 8. Дпя тех изображений детали, когда представление изображения детали в виде совокупности точек приводит к повышению точности определения координат, сигнал с блока 3 памяти переводит коммутатор 8 в такое состояние, при котором выходы блока 4 и ключа 7 через коммутатор 8 подключены ко входу накопителя 9 информации, где хранится текущее изображение в течение времени, необходимого для анализа взаимно-корреляционной функции. Таким образом, накопитель 9 информации, используя текущие значения координат 0 У выхода блока 4 следящей развертки и сигнал, характеризующий наличие изгиба контура (радиуса кривизны) с выхода вычислителя 18, формирует текущее изображение в виде совокупности точек. Если же представление текущего изображения в виде cor вокупности точек приводит к понижению точности определения координат, то сигнал с блока 3 памяти переводит коммутатор 8 в состояние, когда выход датчика 1 подключен через коммутатор 8 ко входу накопителя 9 информации (для обычного изображения), либо когда выход датчика 1 подключен через последовательно соединенные формирователь 2 контуров и коммутатор 8 ко входу накопителя 9 информации (для контурного изобргикения) . Сигнал со второго выхода накопителя 9 информации через квадратор 15, интегратор 16, блок 17 умножения,сформированной величины с ее значением X, хранящимся в блоке 3 памяти, и первый вычислитель 15 квадратного корня поступает на вход блока 11 деления, отдельном вход )м подключенного к выходу фотоприемника, являющегося элементом оптического коррелятора 10. Оптический коррелятор 10 формирует взаимно-корреляционную функцию между текущим и эталонным изображениями:
(e,,4)-{fi(x,f,(+e..nUs,r гдё k,, } - смещения текущего изображения относительно эталонного в системе координат, связанной с эталонным изображением;fi(x,y),
f J (x-t-Si y+4 J-функции, описывающие соответственно эталонное и текущее изображения; S -площадь одного кадра эталонного изображения. Выходное напряжение блока II деления пропорциональное значению нормированной взаимно-корреляционной функции:
rf,«.5f-t - t;- iM5 R«(M) ,,
. )(К.УЫ5
сравнивается первым блоке 12 сравнения со значением нормирО ванной взаимно корреляционной функции, хранящимся в блоке 3 памяти. С выхода блока 12 сравнения на первый вход сумматора 13 поступает сигнал, пропорциональный разности. Этот сигнал характеризует смеиение по соответствующим осям детали на плоскости конвейера относительно центра системы координат, связанной с центром системы координат эталонного изображения« На второй вход сумматора 13 с выхода блока 3 памяти подается сигнал, пропорциональный координатам д., д центра рабочей зоны (плоскости конвейера, на котором располагается деталь) в системе координат, связанной с манипулятором 14, Границы рабочей зоны характеризуются допустимым смещением детали на сцене. Таким образом, с выхода сумматора 13 на манипулятор 14 поступает инфор Мац1{я, достаточная для вывода схвата манипулятора 14 с целью захвата де-. тали и выполнения заданной последовахельности технологических операций
На этом цикл работы устройства заканчивается.
Применение изобретения позволяет повысить точность определения координат детали на основе использования . априорной информации о форме детали.
Формула изобретения
Устройство для визуализации рабочей зоны робота, содержащее последовательно соединенные датчик текущего изображения, формирователь контура объекта, ко1«лутатор, накопитель информации, квадратор, интегратор, блок умножения, вычислитель квадратного корня, блок деления и первый блок, сравнения, второй вход которого подключен к первому выходу первого блока памяти, второй выход которого Соединен со вторым входом блока умножения, а третий выход через задатчик сигналов управления - со вторым входом коммутатора, подключенного третьим входом к выходу датчика текущего изображения, а второй выход накопителя информации через оптический коррелятор соединен со вторым входом блока деления, о тли чающее с я тем, что, с целью повышения точности устройства, оно содержит су иматор и последовательно соединенные второй блок памяти, блок следящей развертки, вычислитель радиуса кривизны участка контура объекта, пороговый элемент и ключ, а также последовательно соединенные задатчик сигналов смещения и второй блок сравнения, втоЕЮй вход которого подключен к выходу блока следящей развертки и четвертому входу коммутатора, а вы-гход - ко второму входу ключа, выходом соединенного с пятым входом коммутатора, четвертый выход первого блока памяти подключен ко второму входу порогового элемента, а пятый выход - к первому входу сумматора, второй вход которого соединен с выходом первого блока сравнения, а выход - с выходом устройства, причем вход второго блока памяти подключен к выходу формирователя контура объекта.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 643918, кл. G 06 К 9/00, 1976.
2.Авторское свидетельство СССР 650441, кл. G 05 01/08, 1977 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подсчета плоских предметов | 1981 |
|
SU1005111A1 |
| Цифровой позиционный электропривод | 1981 |
|
SU1029366A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Оптоэлектронный автосортировщик | 1983 |
|
SU1106554A1 |
| Генератор векторов | 1979 |
|
SU924741A1 |
| Устройство для отображения графической информации на экране электронно-лучевой трубки | 1983 |
|
SU1254535A1 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| Тренажер для обучения операторов радиолокационной станции наведения | 1974 |
|
SU525999A1 |
| Устройство для определения информации о параметрах процесса резания | 1983 |
|
SU1119825A1 |
| Устройство для отображения графической информации на экране телевизионного приемника | 1984 |
|
SU1259332A1 |