Изобретение относится к машиностроению и может быть использовано при создании устройств, предназначенных для выработки зрительной информации робота.
Целью изобретения - повышение быстродействия работы устройства при одновременном повышении точности определения координат.
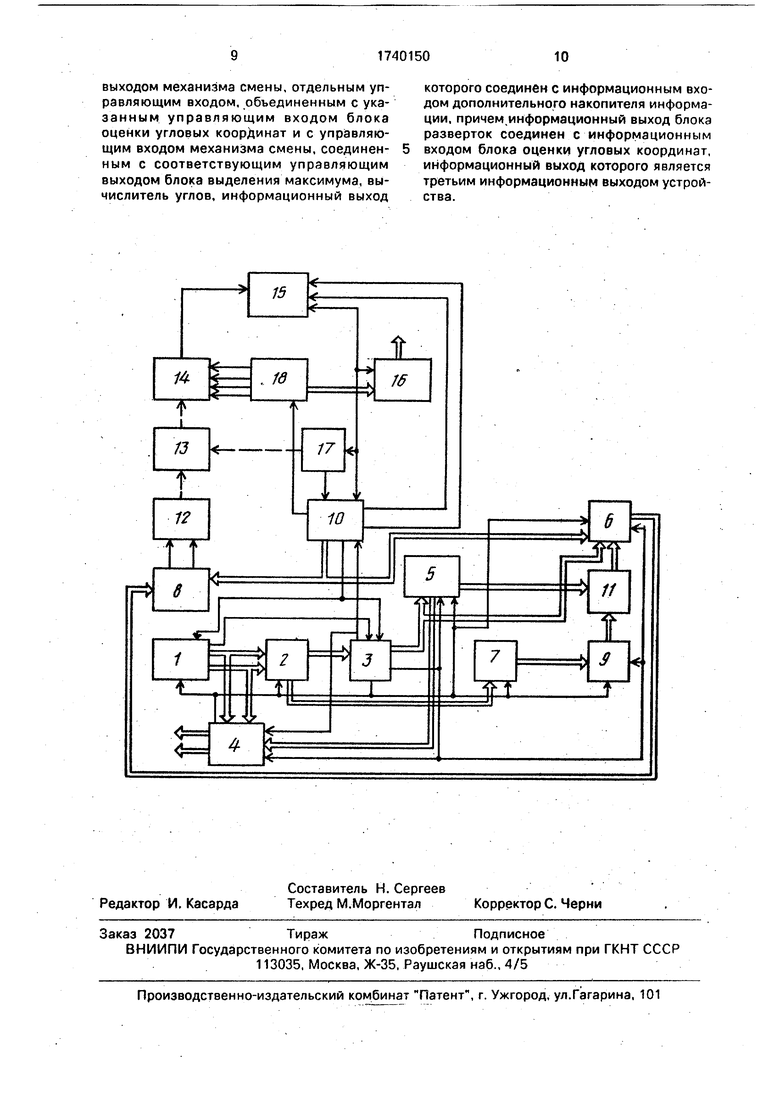
На чертеже приведена функциональная схема устройства.
Первый и второй информационные выходы датчика 1 текущего изображения (ДТИ) подключены к первому и второму информационным входам экстраполятора 2 прямых (ЭП). Управляющий выход ДТИ 1 соединен с первым управляющим входом схемы 3 организации внутреннего цикла (СОВ Ц). Первый и второй информационные выходы ДТИ 1 подключены также к первому и второму информационным входам вычислителя 4 координат центра тяжести изображения (ВКЦТИ). Тактовый выход СОВ Ц 3 подключен к отдельным тактовым входам ДТИ 1, ЭП 2, ВКЦТИ 4, вычислителя 5 линейно-возрастающей функции (ВЛВФ), блока 6 оперативной памяти (БОП), вычислителя 7 узлов (ВУ).
Блок 8 связи соединен с блоком 6, который соединен с дополнительным накопителем 9 информации ОДНИ). Информационный выход СОВ Ц 3 подключен к информационному входу ВЛВФ 5 и отдельному адресно |
Јь О
сл о
му входу БОП 6. Первый управляющий выход СОВ Ц 3 подключен к первому управляющему входу ВКЦТИ 4 и отдельному управляющему входу синхронизатора 10, а второй управляющий выход СОВЦЗ - к второму управляющему входу ВКЦТИ 4, управляющему входу ВЛВФ 5, управляющему входу БОП б и управляющему входу ДНИ 9. Первый информационный выход ЭП 2 соединен с информационным входом ВУ 7, а второй информационный выход ЭП 2-е информационным входом СОВЦ 3. Информационный выход ВУ 7 подключен к инфор- мационному входу ДНИ 9. Третий информационный вход ВКЦТИ-4 соединен с первым информационным выходом ВЛВФ 5. второй информационный выход которого подключен к первому информационному входу блока 11 вычитания (БВ). Информационный выход ДНИ 9 подключен к второму информационному входу БВ 11, информационный выход которого соединен с инфор- мационным входом БОП 6. Первый управляющий выход синхронизатора 10 подключен к управляющему входу ДТИ 1 и второму управляющему входу СОВЦ 3. Адресный выход синхронизатора 10 подключен к адресному входу блока 8 связи (БС) и отдельному адресному входу БОП 6, информационный выход которого соединен с информационным входом ВС 8. Два информационных выхода ВС 8 соединены с отдельными входами накопителя 12 информации (НИ), который оптически связан через коррелятор 13 с блоком 14 считывания (БСЧ).
Информационный выход БСЧ подключен к информационному входу блока 15 выделения максимума (БВМ), управляющий выход которого соединен с управляющими входами синхронизатора 10, блока 16 оценки угловых координат (БОУК) и механизма 17 смены (МС). Корелятор 13 механически связан с МС 17, управляющий выход которого соединен с вторым управляющим входом синхронизатора 10, тактовый выход которого подключен к тактовому входу блока 18 разверток (БР). Четыре управляющих- входа БСЧ 14 соединены с четырьмя управляющими выходами БР 18, информационный выход которого подключен к информационному входу БОУК 16.
Второй и третий управляющие выходы синхронизатора 10 подключены соответственно к первому и второму управляющим входам БВМ 15, Первый и второй информационные выходы ВКЦТИ 4 являются первым и вторым информационными выходами устройства, 8 информационный выход БОУК 16
является третьим информационным выходом устройства.
Устройство работает циклически. На очередном цикле работы устройства ДТИ 1
воспринимает изображение участка сцены, выделяет изображение объекта манипулирования (ОМ) и начинает слежение за его контуром. При этом по сигналу Запуск, приходящему с синхронизатора 10, происходит сброс соответствующих счетчиков ДТИ 1. С ДТИ 1 снимается сигнал Готовность, свидетельствующий о начале слежения за контуром (появился видеосигнал определенной амплитуды). Синхронизация
работы ДТИ 1 обеспечивается тактовым импульсом, поступающим на отдельный вход от СОВЦ 3. С ДТИ 1 снимаются сигналы Xi, У|, характеризующие положение 1-го элемента контура изображения ОМ. Сигналы
Xi, У поступают на ВКЦТИ 4, работа которого описывается следующими выражениями
Хс
1
2 N
2(2УГ1), Ус i 1
1
N
ZC2XMH1)
где Хс. Ус - координаты центра тяжести изображения, ограничиваемого контуром, Xi, У| - координаты 1-го элемента контура в прямоугольной системе координат, связанной с ТИ (номера столбца и строки матрицы изображения),
N - число элементов (дискретов) в контуре.
Сигнал, пропорциональный числу N,
снимается с вычислителя линейно возрастающей функции 5.
При подходе считывающего луча (ячейки) к краю изображения ОМ датчик 1 выдаетсигнал готовности на СОВЦЗ и переходит в режим слежения с синхронизацией от СОВЦ 3. Эта синхронизация осуществляется тактовыми импульсами. На выходе ДТИ 1 с каждым тактовым импульсом появляются
координаты Xi, У| очередной точки контура, поступающие на экстраполятор 2 прямых, который обеспечивает построение прямых линий. Работа экстраполятора 2 прямых описывается следующим выражением
50
УП V n + m
Хп X n + m
(2)
где К - угловой коэффициент прямой линии; Xn. Xn+m, УГ. Уп+m - координаты точек контура в прямоугольной системе координат, связанной с плоскостью накопителя информации;
n - текущий элемент контура (текущий дискрет контура);
m - постоянное число элементов (дискретов) контура.
Таким образом, экстраполятор 2 осуществляет следующие операции:запоминание координат Хп, Xn+m. Уп. Уп+m. точек контура; построение прямых линий, проведенных через точки с координатами Хп и Xn+m, Уп и УгН-п.
С выхода экстраполятора 2 поступает на вычислитель 7 углов сигнал, пропорциональный коэффициенту наклона прямой. С выхода экстраполятора 2 сигналы, характеризующие начальные (исходные) координаты обхода контура, поступают также на СОВЦ 3. Вычислитель 7 углов определяет угол между предыдущей и текущей прямыми линиями.- Работа вычислителя 7 узлов описывается следующим выражением
$ arctg
K2-Ki 1 + Ki Ка
где ft - угол между предыдущей и текущей прямыми линиями;
Ki и К2 - коэффициенты, определяемые по формуле (2), при этом Ki характеризует угловой коэффициент предыдущей прямой, а Ка - текущей прямой.
Сигнал, пропорциональный величине угла $, поступает на дополнительный накопитель 9 информации, осуществляющий суммирование величин следующим образом
0(n )Z0.
i 1
где/3(п )- результирующая функция;
п - число углов р.
На выходе накопителя 9 в процессе обхода формируется дискретный сигнал, описывающий круговой i обход контура и пропорциональный функции, представляющей собой сумму линейно возрастающей функции и функции, характеризующей отклонения данного изображения контура ОМ от изображения контура круга.
Во время второго обхода контура ОМ изображения вычислитель 5 линейно возрастающей функции строит линейно возрастающую функцию в следующем виде
Кн-i- Kj+M 360 N
1 0, 1.2N (5)
Для работы вычислителя 5 используется информация со СОВЦ 3 (сигнал, характеризующий номер элемента контура, сигнал Сброс и тактовый импульс).
После этого блок 11 вычитания производит вычитание линейно возрастающей функции KI+I (5) из результирующей функции ft О1 ) (4). В результате этой операции на 5 выходе блока 11 вычитания будет сигнал, характеризующий информативную часть /(п ) результирующей функцииуЗ(п ). Необходимость операции вычитания вызвана тем, что в процессе обхода контура на выхо10 де дополнительного накопителя 9 информации формируется сигнал в виде дискретной функции, представляющей собой сумму линейно возрастающей функции и функции, характеризующей отклонения данной раз15 вертки контура изображения ОМ от развертки контура изображения круга. Последняя часть функции/ (п ) является информационной, а функция Кц-1 - неинформативной. Таким образом, блок 11 вычитания осу20 ществляет следующую операцию
)№)-Км.(6)
Сигнал, пропорциональный функции /(п ), записывается в БОП 6. Операция Запись в БОП 6 осуществляется с помощью
25 управляющих сигналов, поступающих с СОВЦ 3 (тактовый и управляющий импульсы, сигнал, характеризующий номер элемента в контуре). Считывание информации о БОП 6 осуществляется по сигналу от СОВЦ
30 3 по адресу от синхронизатора 10. При этом сигнал с БОП 6 (т.е. цифровой видеосигнал) поступает на блок 8 связи, осуществляющий формирование в накопителе 12 информации текущей реализации. В качестве нако35 пителя 12 информации можно использовать различные ЗУ (например регистры или ЗЭЛТ). С помощью коррелятора 13 формируется взаимнокорреляционная функция текущей реализации (т.е. текущее изобра40 жение (ТИ) и эталонной реализацией (т.е. эталонное изображение ЭЙ). Причем эталонная реализация выполнена в виде двух последовательно соединенных информативных частей результирующих функций
45 /(п ), т.е.
/(п )+№).(7)
Применение ЭЙ в таком виде обеспечивает представление дополнительной информации, необходимой для правильной 50 оценки угла G) (т.е. оценки смещения текущей реализации относительно эталонной реализации). ЭЙ выполнено в виде оптического изображения (например позитив фотографии).
55 в качестве коррелятора 13 может быть использован модифицированный корреля- гор Майера-Эпплера (оптический).
Блок 14 считывания с помощью блока 18 разверток обеспечивает считывание изображения ВКФ и выдачу на блок 45 выделения максимума видеосигнала, характеризующего ВКФ. Блок 15 выделения максимума, сравнивая текущий и последующий видеосигналы, выдает сигнал сравнения при равенстве (с допустимой точностью) входных видеосигналов. По сигналу сравнения БОУК 16 снимает с блока 18 разверток сигнал, характеризующий угловую координату сц.
Таким образом, угол а оценивается путем анализа следующего выражения
l(a)/Ј(n )Ј(n+Ј)dЈ
(8)
По сигналу сравнения с помощью механизма 17 смены осуществляется смена ЭЙ. На этом один цикл работы устройства заканчивается. Следующий цикл начинается по сигналу от синхронизатора 10.
Формула изобретения Устройство для определения координат объекта манипулирования в рабочей зоне робота, содержащее датчик текущего изображения, блок связи, двумя информационными выходами соединенный с двумя информационными входами накопителя информации, оптически связанного с коррелятором, который оптически связан с блоком считывания, четырьмя управляющими входами соединенным с четырьмя управляющими выходами блока разверток, а информационным выходом соединенный с информационным входом блока выделения максимума, соединенного управляющим выходом с управляющим входом блока оценки угловых координат, синхронизатор, тактовым выходом соединенный с тактовым входом блока разверток, а адресным выходом - с первым адресным входом блока связи, механизм смены, механически связанный с коррелятором,отличающееся тем, что, с целью повышения быстродействия в работе устройства при одновременном повышении точности определения координат, в него дополнительно введены зкстраполятор прямых, первым информационным выходом подключенный к информационному входу вычислителя углов, а вторым информационным выходом подключенный к информационному входу схемы организации внутреннего цикла, тактовым выходом соединенной с отдельными тактовыми входами экстраполятора прямых, вычислителя линейно возрастающей функции, блока оперативной памяти, вычислителя углов, дополнительного накопителя информации, вычислителя координат центра тяжести текущего изображения и датчика текущего изображения, первым информационным выходом подключенного к первому информационному входу экстраполятора прямых и первому информационному входу вычислителя координат центра тяжести текущего изображения, а вторым информационным выходом - к второму информационному входу экстраполятора прямых и второму информационному входу вычислителя координат центра тяжести те0 кущего изображения, третий информационный вход которого соединен с первым информационным выходом вычислителя линейно возрастающей функции, а первый уп- равляющий вход, объединенный с
5 отдельным управляющим входом синхронизатора, соединен с первым управляющим выходом схемы-организации внутреннего цикла, а второй управляющий вход, объединенный с управляющим входом вычислите0 ля линейно возрастающей функции, управляющим входом дополнительного накопителя информации, управляющим входом блока оперативной памяти, соединен с вторым управляющим выходом схемы орга5 низации внутреннего цикла, причем первый и второй информационные выходы вычислителя координат центра тяжести текущего изображения являются первым и вторым информационными выходами устройства,
0 блок вычитания, первым и вторым информационными входами подключенный соответственно к второму информационному выходу вычислителя линейно возрастающей функции и к информационному выходу до5 полнительного накопителя информации, а информационным выходом подключенный к информационному входу блока оперативной памяти, информационным выходом соединенного с информационным входом
0 блока связи, первым адресным входом, объединенным с соответствующим адресным входом блока связи, соединенным с соответствующим адресным выходом синхронизатора, а вторым адресным входим,
5 объединенным с информационным входом вычислителя линейно возрастающей функции, соединенным с информационным выходом схемы организации внутреннего цикла, первым управляющим входом под0 ключенным к управляющему выходу датчика текущего изображения, а вторым управляющим входом, объединенным с управляющим входом датчика текущего изображения и подключенным к первому
5 управляющему выходу синхронизатора, вторым и третьим управляющими выходами, соединенного соответственно с первым и вторым управляющими входами блока выделения максимума, отдельным управляющим входом соединенного с управляющим
выходом механизма смены, отдельным управляющим входом, объединенным с указанным управляющим входом блока оценки угловых координат и с управляющим входом механизма смены, соединенным с соответствующим управляющим выходом блока выделения максимума, вычислитель углов, информационный выход
которого соединен с информационным входом дополнительного накопителя информации, причем информационный выход блока разверток соединен с информационным входом блока оценки угловых координат, информационный выход которого является третьим информационным выходом устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отображения информации на экране цветного телевизионного индикатора | 1986 |
|
SU1388940A1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| ЦИФРОВОЙ ДАЛЬНОМЕР | 1992 |
|
RU2069003C1 |
| Устройство для распознавания и определения координат объекта манипулирования в рабочей зоне робота | 1985 |
|
SU1370639A1 |
| Устройство для считывания и отображения видеоинформации | 1988 |
|
SU1817116A1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СПЛОШНЫХ ОБРАЗОВ | 1991 |
|
RU2042204C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2465552C1 |
| Устройство для отображения информации на экране цветного телевизионного индикатора | 1990 |
|
SU1718265A1 |
| Устройство для отображения информации | 1985 |
|
SU1354183A1 |
Использование: при создании устройств, предназначенных для выработки зрительной информации робота. Сущность изобретения: в устройство, содержащее датчик текущего изображения, блок связи, накопитель информации, корреклятор, эталонное изображение, блок считывания, блок разверток, блок выделения максимума, блок оценки угловых координат, синхронизатор, механизм смены, дополнительно введены экстраполятор прямых, схема организации внутреннего цикла, вычислитель координат центра тяжести текущего изображения, вычислитель линейновозра- стающей функции, блок оперативной памяти, вычислитель углов, дополнительный накопитель информации, блок вычитания. 1 ил. у Ё
. 1в
1
| Ангелов М.Л., Сырямкин В.И | |||
| Телевизионная корреляционно-экстремальная сенсорная система для промышленных роботов | |||
| - Телевизионные вычислительные устройства, Томск, изд-во Томского университета, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
