Изобретение относится к авиационной технике, в частности к бортовым информационно-вычислительным системам летательного аппарата, и может быть использовано для определения массы летательного аппарата.
Наиболее близким к изобретению является устройство определения массы летательного аппарата, которое состоит из последовательно соединенных датчиков давления, процессора и отображающего устройства в кабине экипажа, причем процессор выполнен в виде микроконтроллера, отображающее устройство в кабине экипажа выполнено в виде дисплея, датчики давления выполнены в виде пьезоэлектрических датчиков и размещены в местах крепления стоек шасси с конструкцией летательного аппарата, при этом в датчиках давления при действии на них массы летательного аппарата образуются сигналы в виде электродвижущих сил (ЭДС), которые поступают в микроконтроллер, где преобразуются в численные величины массы летательного аппарата и положения его центра масс относительно продольной и поперечной осей, а затем эти сигналы поступают в кабину экипажа на отображающее устройство, выполненное в виде дисплея, на котором отображается информация о массе летательного аппарата и положении его центра масс перед взлетом, а также на выдачу сигнала запрета вылета летательного аппарата в случае, если текущее значение массы летательного аппарата больше допустимого значения и положение его центра масс перед взлетом не соответствует допустимым значениям [1].
Недостатком данного устройства является отсутствие контроля диспетчером массы летательного аппарата при взлете.
Технический результат изобретения заключается в повышении безопасности полетов за счет дополнительного контроля массы груза летательного аппарата диспетчером.
Технический результат изобретения достигается тем, что в устройстве определения массы летательного аппарата, которое состоит из последовательно соединенных датчиков давления, процессора и отображающего устройства в кабине экипажа, причем процессор выполнен в виде микроконтроллера, отображающее устройство в кабине экипажа выполнено в виде дисплея, датчики давления выполнены в виде пьезоэлектрических датчиков и размещены в местах крепления стоек шасси с конструкцией летательного аппарата, при этом в датчиках давления при действии на них массы летательного аппарата образуются сигналы в виде электродвижущих сил (ЭДС), которые поступают в микроконтроллер, где преобразуются в численные величины массы летательного аппарата и положения его центра масс относительно продольной и поперечной осей, а затем эти сигналы поступают в кабину экипажа на отображающее устройство, выполненное в виде дисплея, на котором отображается информация о массе летательного аппарата и положении его центра масс перед взлетом, а также на выдачу сигнала запрета вылета в случае, если текущее значение массы летательного аппарата больше допустимого значения и положение его центра масс перед взлетом не соответствует допустимым значениям, дополнительно введены блок памяти, передающее устройство, элемент И, первый и второй задатчики сигналов, элемент ИЛИ, приемный канал диспетчера, при этом выход микроконтроллера соединен с первым входом блока памяти, первым входом элемента ИЛИ, второй и третий входы которого соединены соответственно с выходами первого и второго задатчиков сигналов, а выход соединен с входом передающего устройства, второй вход блока памяти соединен с выходом элемента И, первый и второй входы которого соединены с выходом датчика высоты и выходом второго задатчика, выход передающего устройства по линии бесконтактной связи соединен с входом приемного канала диспетчера, который состоит из приемного устройства, элемента ИЛИ, дисплея и блока памяти, при этом выходы приемного устройства соединены с входами элемента ИЛИ, выход которого соединен с входами дисплея и блока памяти.
Новыми элементами, обладающими существенными отличиями по устройству, являются блок памяти, первый и второй задатчики сигналов, элемент И, элемент ИЛИ, передающее устройство и приемный канал связи между известными и новыми элементами.
Изобретение поясняется чертежами.
На фиг.1 представлена схема действия сил на летательный аппарат при его нахождении на земле. На фиг.2 - структурная схема устройства для определения массы летательного аппарата. На фиг.3 - структурная схема приемного канала диспетчера.
Летательный аппарат (фиг.1) имеет силу тяжести G, приложенную в его центре масс (Ц.М.). Центр масс располагается внутри фюзеляжа 1. Снизу к фюзеляжу крепятся стойки шасси: основные стойки 2 и 3 и передняя стойка 4. Сила тяжести G уравновешивается реакциями от земли, действующими на основные стойки Nгл. и переднюю стойку Nпер.. Реакция на основные стойки состоит из двух составляющих: действующих на левую основную стойку Nгл.л. и на правую основную стойку Нгл.пр..
На каждой стойке шасси, между фюзеляжем и стойкой, установлены датчики давления 5, 6 и 7, например пьезоэлектрические датчики. При давлении на них они вырабатывают сигналы Сгл.л., Сгл.пр. и Спер. соответственно с датчиков на главной левой, на главной правой и на передней стойках в виде напряжения (ЭДС). База шасси (расстояние между осями колес главных стоек и осью переднего колеса) обозначена через L. Расстояние от центра масс до осей колес основных стоек обозначено через l1, а до оси переднего колеса - через l2. Ширина колеи (расстояние между осями главных стоек) обозначена через «а» (вид А, фиг.1). Расстояние от центра масс до оси главной левой стойки обозначено через «a1», а до оси главной правой стойки - через «а2».
На фиг.2 датчики давления 5, 6 и 7 обозначены через Дгл.пр., Дгл.л. и Дпер. соответственно датчики на главной правой, на главной левой и передней стойках, с которых поступают сигналы соответственно Сгл.пр., Сгл.л. и Спер..
Устройство для определения массы летательного аппарата содержит первый 5, второй 6 и третий 7 датчики, микроконтроллер 8, дисплей 9, блок 10 памяти, передающее устройство 11, элемент И 12, первый 13 и второй 14 задатчики сигналов, согласующее устройство 15, приемный канал 16 диспетчера, при этом выходы первого 5, второго 6 и третьего 7 датчиков соединены соответственно с первым, вторым и третьим входами микроконтроллера 8, выход которого соединен с входом дисплея 9, первым входом блока 10 памяти, первым входом элемента ИЛИ 15, второй и третий входы которого соединены соответственно с выходами первого 13 и второго 14 задатчиков сигналов, а выход соединен с входом передающего устройства 11, второй вход блока 10 памяти соединен с выходом элемента И 12, первый и второй входы которого соединены с выходом датчика высоты и выходом второго 14 задатчика, выход передающего устройства бесконтактной связью связан с приемным каналом 16 диспетчера, который состоит из приемного устройства 17, элемента ИЛИ 18, дисплея 19 и блока 20 памяти, при этом выходы приемного устройства 17 соединены с входами элемента ИЛИ 18, выход которого соединен с входами дисплея 19 и блока 20 памяти.
Устройство работает следующим образом.
На земле, когда летательный аппарат не движется, то суммы проекций всех сил на каждую из координатных осей и суммы их моментов относительно этих осей равны нулю [3]. Проекции сил, действующих на летательный аппарат, будут только на ось У. На остальные оси эти проекции будут равны нулю. Сумма проекций сил на ось У соответствует выражению:
ΣFiy=0; Nгл.+Nпер.-G=0;
Nгл.=Nгл.л.+Nгл.пр.
Тогда Nгл.л.+Nгл.пр.+Nпер.-G=0.
Или 
Таким образом, масса G летательного аппарата определяется в соответствии с выражением (1).
Моменты будут действовать только относительно осей X и Z, а относительно оси У они будут равны нулю.
Сумма моментов относительно оси X определяется в соответствии с выражением:
Σmх=0; -Nгл.л.·а1+Nгл.пр.·а2=0
Отсюда 
Расстояние «а» известно (колея шасси).
Тогда a2=a-a1.
Подставляем в (2) и получаем:
Nгл.пр.(a-a1)=Nгл.л.·а1.
Или Nгл.пр.·а-Nгл.пр.·а1=Nгл.л.·а1.
Или Nгл.пр.·a-a1(Nгл.пр.+Nгл.л.).
Или Nгл.пр.·a=a1·Nгл..
Отсюда 
Т.е. положение центра масс в поперечном направлении определяется формулой (3).
Сумма моментов относительно оси Z определяется следующим образом:
Σmz=0; -Nгл.·l1+Nпер.·l2=0;
Отсюда 
База шасси L известна. Тогда l2=L-l1.
Подставляем в (4) и получаем:
Nпер.(L-l1)=Nгл.·l1.
Или Nпер.·L-Nпер.·l1=Nгл.·l1.
Или Nпер.·L=l1(Nпер.+Nгл.).
Отсюда 
Уравнение (5) определяет положение центра масс в продольном направлении летательного аппарата.
Таким образом, используя уравнение (1), определяется масса летательного аппарата М (сила тяжести G). Значения реакций Мгл.л., Nгл.пр. и Nпер. определяются по величинам сигналов (ЭДС) Сгл.л., Сгл.пр. и Спер. с датчиков давлений 5, 6 и 7. Эта масса должна быть меньше или равной ее предельному значению Мпред. (Gпред.), т.е. М≤Мпред. (G<Gпред.) или Nгл.л.+Nгл.пр.+Nпер.≤Gпред.. Значение Gпред. для каждого летательного аппарата известно.
По уравнению (5) определяется положение центра масс вдоль продольной оси летательного аппарата. Величина l1 должна быть меньше L, т.е. l1<L. Если положение центра масс выходит за пределы базы шасси, то нарушается продольная устойчивость при разбеге.
По уравнению (3) определяется положение центра масс в поперечном направлении. Желательно, чтобы значение «a1» было близко к половине величины «а», т.е. 
иначе появляется крен.
Устройство работает следующим образом. С датчиков давления 5, 6 и 7 (Дгл.пр., Дгл.л., Дпер.) снимаются сигналы (ЭДС) Сгл.пр., Сгл.л. и Спер. (фиг.2), пропорциональные усилиям, действующим на эти датчики (пропорционально Nгл.пр., Nгл.л. и Nпер.), которые пропорциональны массе летательного аппарата (его силе тяжести): чем больше масса летательного аппарата, тем больше сигналы Сгл.пр., Сгл.л., Спер.. Эти сигналы поступают на микроконтроллер 8, который преобразует их в сигналы «масса летательного аппарата М», «Центр масс l1» (положение центра масс на продольной оси летательного аппарата), «Центр масс a1» (положение центра масс на поперечной оси самолета) по следующему алгоритму.
1. Каждый сигнал Сгл.пр., Сгл.л., Спер. преобразуется в массу m1, m2, m3 соответственно.
2. Суммируются все массы, образуя массу летательного аппарата M=m1+m2+m3+mш, где mш - масса всех стоек шасси (она известна заранее).
3. Формируется сигнал «Масса летательного аппарата М» и подается на дисплей 9, находящийся в кабине экипажа. Если М>М допустимое, то вылетать с такой массой запрещается. На дисплее загорается красный сигнал - вылет запрещается.
4. Формула (5) преобразуется в формулу:
5. Формируется сигнал «Центр масс l1» и подается на дисплей 9, находящийся в кабине экипажа.
Если l1<L, то на дисплее высвечивается значение l1 зеленым цветом.
Самое благоприятное значение  с точки зрения продольной устойчивости летательного аппарата на разбеге (и пробеге, если посадка с грузом), т.е.
с точки зрения продольной устойчивости летательного аппарата на разбеге (и пробеге, если посадка с грузом), т.е.  .
.
Если l1 близка к 0,1 L и менее или к 0,9 L и более, то следует экипажу обратить особое внимание на возможность вылета с таким расположением центра масс или повышенное внимание на управление на этих режимах. Если l1≤0·L или l1>L, то вылет с таким расположением центра масс невозможен: очень велика вероятность катастрофы. На дисплее загорается красный сигнал - вылет запрещается.
6. Формула (3) преобразуется в формулу:

7. Формируется сигнал «Центр масс a1» и подается на дисплей 9, находящийся в кабине экипажа.
Наиболее благоприятное положение центра масс, когда  , т.е. центр масс находится в плоскости, продольной оси летательного аппарата, и крена в этом случае не будет при отрыве летательного аппарата от земли. Если a1<0·a или a1>a, то вылет с таким расположением центра масс запрещается, так как случайное попадание одной из стоек шасси в яму или на бугорок может накренить летательный аппарат на разбеге и привести к катастрофе. Если 0,5a<a
1<0,5a, то летчик должен быть готов парировать крен при отрыве летательного аппарата от земли.
, т.е. центр масс находится в плоскости, продольной оси летательного аппарата, и крена в этом случае не будет при отрыве летательного аппарата от земли. Если a1<0·a или a1>a, то вылет с таким расположением центра масс запрещается, так как случайное попадание одной из стоек шасси в яму или на бугорок может накренить летательный аппарат на разбеге и привести к катастрофе. Если 0,5a<a
1<0,5a, то летчик должен быть готов парировать крен при отрыве летательного аппарата от земли.
При a 1<0·a и a 1>a на дисплее 9 загорается красный сигнал - вылет запрещается.
Таким образом, перед вылетом летчик нажимает на дисплее соответствующую кнопку, чтобы узнать массу летательного аппарата и расположение его центра масс. Если М>M допустимое, l1≤0·L или l1≥L, a1<0·a или a1>a, то на дисплее загорается красный сигнал (по какой из названных причин, летчик определит по численному значению М, l1, a1). В остальных случаях значения этих величин высвечиваются другим (не красным) цветом, и летчик, находясь в кабине летательного аппарата, получает эту информацию. Информация о массе летательного аппарата и расположении центра массы поступает дополнительно в блок 10 памяти и через элемент ИЛИ на вход передающего устройства 11.
Передающее устройство 11 обеспечивает передачу информации о номере летательного аппарата, его массе и расположении его центра масс, о времени передачи диспетчеру.
Первый 13 задатчик сигналов формирует сигнал, соответствующий номеру летательного аппарата, а второй 14 задатчик формирует сигнал, соответствующий времени передачи информации, данные сигналы поступают на второй и третий входы элемента ИЛИ 15, на первый вход которого поступает сигнал, соответствующий массе и расположению его центра масс.
Приемное устройство 17 принимает данные сигналы и через элемент ИЛИ 18 передает их на дисплей 19 и в блок 20 памяти для хранения.
Диспетчер в зависимости от данной информации принимает решение на запрет или разрешение взлета летательного аппарата.
Кроме того, в блоке 10 памяти происходит суммирование перевозимого груза и фиксация времени взлета летательного аппарата.
При взлете летательного аппарата с датчика высоты сигнал поступает на первый вход элемента И 12, на второй вход которого поступает сигнал с выхода второго 14 задающего устройства. С выхода элемента И 12 сигнал поступает на второй вход блока 10 памяти.
Таким образом, обеспечивается повышение безопасности полета за счет дополнительного контроля диспетчером массы и центровки груза.
Источники информации
1. Патент РФ №2400405, от 27.09.2010 г.
3. Тарг С.М. Краткий курс теоретической механики. - М.: Наука, 1970. - с.117.
4. Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике для поступающих в вузы и для самообразования. - М.: Наука, 1989. - С.42, 51-53.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА ЗАГРУЗКИ, КОНТРОЛЯ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА ПЕРЕД ВЫЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466360C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА, ПОЛОЖЕНИЯ ЕГО ЦЕНТРА МАСС И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2400405C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502058C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2443991C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549601C1 |
| СПОСОБ ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ ВЕСОВОЕ УСТРОЙСТВО | 2010 |
|
RU2422782C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПРЕДПОЛЕТНОГО КОНТРОЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2545156C1 |
| РАДИОЛОКАТОР ДЛЯ ЛЕГКОМОТОРНОГО САМОЛЕТА | 2009 |
|
RU2390795C1 |
| СПОСОБ УЧЕТА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502075C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2315334C1 |


Изобретение относится к авиационной технике, в частности к бортовым информационно-вычислительным системам летательного аппарата. Устройство для определения массы летательного аппарата содержит последовательно соединенные пьезоэлектрические датчики давления, размещенные в местах крепления стоек шасси, процессор и отображающее устройство в кабине экипажа. Также имеются передающее устройство, элемент И, два задатчика сигналов, датчик высоты и приемный канал диспетчера, который состоит из приемного устройства, элемента ИЛИ, дисплея и блока памяти. Решение направлено на повышение безопасности полетов. 1 з.п. ф-лы, 3 ил.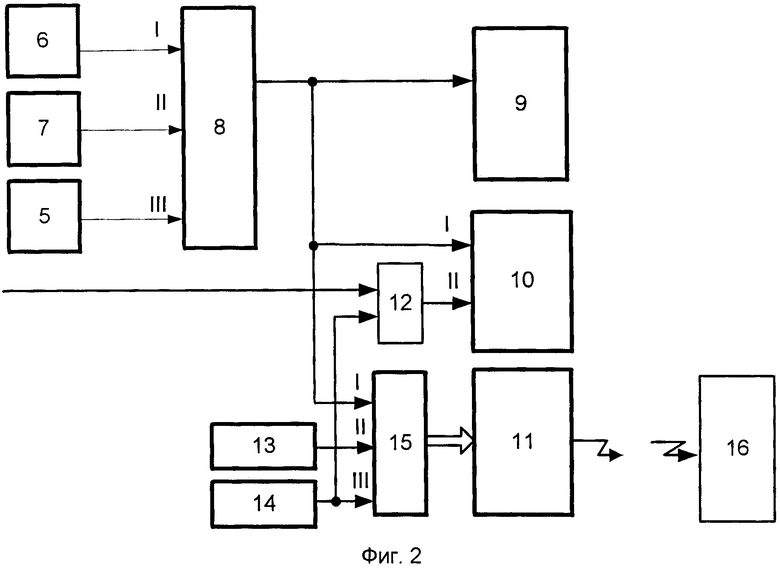
1. Устройство для определения массы летательного аппарата содержит последовательно соединенные датчики давления, процессор и отображающее устройство в кабине экипажа, причем процессор выполнен в виде микроконтроллера, отображающее устройство в кабине экипажа выполнено в виде дисплея, датчики давления выполнены в виде пьезоэлектрических датчиков и размещены в местах крепления стоек шасси с конструкцией летательного аппарата, при этом в датчиках давления при действии на них массы летательного аппарата образуются сигналы в виде электродвижущих сил (ЭДС), которые поступают в микроконтроллер, где преобразуются в численные величины массы летательного аппарата и положения его центра масс относительно продольной и поперечной осей, а затем эти сигналы поступают в кабину экипажа на отображающее устройство, выполненное в виде дисплея, на котором отображается информация о массе летательного аппарата и положении его центра масс перед взлетом, и запрете вылета в случае, если текущее значение массы летательного аппарата больше допустимого значения и положение его центра масс перед взлетом не соответствует допустимым значениям, отличающееся тем, что введены блок памяти, передающее устройство, элемент И, первый и второй задатчики сигналов, элемент ИЛИ, приемный канал диспетчера, при этом выход микроконтроллера соединен с первым входом блока памяти, первым входом элемента ИЛИ, второй и третий входы которого соединены соответственно с выходами первого и второго задатчиков сигналов, а выход соединен с входом передающего устройства, второй вход блока памяти соединен с выходом элемента И, первый и второй входы которого соединены с выходом датчика высоты и выходом второго задатчика сигналов, выход передающего устройства по линии бесконтактной связи соединен с входом приемного канала диспетчера, который состоит из приемного устройства, элемента ИЛИ, дисплея и блока памяти, при этом выходы приемного устройства соединены с входами элемента ИЛИ, выход которого соединен с входами дисплея и блока памяти.
2. Устройство для определения массы летательного аппарата по п.1, отличающееся тем, что алгоритм функционирования микроконтроллера заключается в преобразовании сигналов с выходов датчиков давления Сгл.пр, Сгл.л, Спер микроконтроллером соответственно в сигналы m1, m2, m3, определение массы летательного аппарата осуществляется на основе суммирования всех значений масс М=m1+m2+m3+mш, где mш - масса всех стоек шасси, положение центра масс относительно продольной и поперечной осей летательного аппарата, формировании сигнала «Масса летательного аппарата М» и выдаче его на дисплей, находящийся в кабине экипажа, сравнении текущей массы летательного аппарата с допустимым значением, выдаче сигнала запрета вылета при М>М допустимое, определении координаты центра массы вдоль продольной оси летательного аппарата в соответствии с выражением  где L - база шасси летательного аппарата, формировании сигнала «Центр масс l1» и выдаче его на дисплей, находящийся в кабине экипажа, сравнении полученного значения со значением L, выдаче рекомендаций экипажу о возможности взлета при условии, если положения центра массы вдоль продольной оси меньше базы шасси летательного аппарата l1<L, при этом положение центра массы летательного аппарата является оптимальным в случае
где L - база шасси летательного аппарата, формировании сигнала «Центр масс l1» и выдаче его на дисплей, находящийся в кабине экипажа, сравнении полученного значения со значением L, выдаче рекомендаций экипажу о возможности взлета при условии, если положения центра массы вдоль продольной оси меньше базы шасси летательного аппарата l1<L, при этом положение центра массы летательного аппарата является оптимальным в случае  , на дисплее высвечивается зеленым цветом значение l1, если l1 близка к 0,1 L и менее или к 0,9 L и более, то экипажу следует обратить особое внимание на возможность вылета с таким расположением центра масс или повышенное внимание на управление на этих режимах, выдаче рекомендаций летчику вылет запрещен, если l1≤0 или l1>L, на дисплее загорается красный цвет, определении координат центра массы вдоль поперечной оси летательного аппарата в соответствии с выражением
, на дисплее высвечивается зеленым цветом значение l1, если l1 близка к 0,1 L и менее или к 0,9 L и более, то экипажу следует обратить особое внимание на возможность вылета с таким расположением центра масс или повышенное внимание на управление на этих режимах, выдаче рекомендаций летчику вылет запрещен, если l1≤0 или l1>L, на дисплее загорается красный цвет, определении координат центра массы вдоль поперечной оси летательного аппарата в соответствии с выражением  где а - колея шасси летательного аппарата, формировании сигнала «Центр масс а1» и выдаче его на дисплей, находящийся в кабине экипажа, сравнении полученной координаты со значением а, выдаче рекомендаций летчику о возможности взлета при условии a1<a и на дисплее высвечивается значение а1 зеленым цветом, при этом значение положения центра масс вдоль поперечной оси является наиболее оптимальным при условии
где а - колея шасси летательного аппарата, формировании сигнала «Центр масс а1» и выдаче его на дисплей, находящийся в кабине экипажа, сравнении полученной координаты со значением а, выдаче рекомендаций летчику о возможности взлета при условии a1<a и на дисплее высвечивается значение а1 зеленым цветом, при этом значение положения центра масс вдоль поперечной оси является наиболее оптимальным при условии  если 0,5a<a1<0,5a, то летчик должен быть готов парировать крен при отрыве летательного аппарата от земли, выдаче рекомендаций летчику о невозможности взлета, если a1<0·a или a1>a, и на дисплее загорается красный цвет.
если 0,5a<a1<0,5a, то летчик должен быть готов парировать крен при отрыве летательного аппарата от земли, выдаче рекомендаций летчику о невозможности взлета, если a1<0·a или a1>a, и на дисплее загорается красный цвет.
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА, ПОЛОЖЕНИЯ ЕГО ЦЕНТРА МАСС И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2400405C1 |
| Кипоразрыхлитель-смеситель | 1953 |
|
SU100615A1 |
| Приспособление для отделения грубого помола от мелкого при быстроходных угольных мельницах | 1928 |
|
SU11885A1 |
| US 2004226996 A1, 18.11.2004 | |||
| Автоматическая катушка для открепления резьбы бурильных труб | 1948 |
|
SU73986A1 |
| US 5521827 A, 28.05.1996. | |||

