Изобретение относится к авиационной технике, в частности к бортовым информационно-вычислительным системам летательного аппарата.
Наиболее близким к изобретению является способ определения массы летательного аппарата, заключающийся в том, что размещают датчики давления непосредственно на летательном аппарате, в месте крепления стоек шасси к конструкции летательного аппарата, формируют сигналы в датчиках давления при действии на них массы летательного аппарата, преобразуют данные сигналы процессором в численные величины массы летательного аппарата и положения его центра масс относительно его продольной и поперечной осей, отображают на дисплее информацию экипажу о массе летательного аппарата и положении его центра масс относительно его продольной и поперечной осей перед взлетом, сравнивают текущую массу летательного аппарата с допустимым значением, выдают сигнал запрета вылета летательного аппарата, в случае если текущее значение массы летательного аппарата больше допустимого значения и положение его центра масс перед взлетом не соответствует допустимым значениям [1].
Наиболее близким к изобретению является устройство определения массы летательного аппарата, которое состоит из последовательно соединенных датчиков давления, процессора и отображаемого устройства в кабине экипажа, причем процессор выполнен в виде микроконтроллера, отображающее устройство в кабине экипажа выполнено в виде дисплея, датчики давления выполнены в виде пьезоэлектрических датчиков и размещены в местах крепления стоек шасси с конструкцией летательного аппарата, при этом в датчиках давления при действии на них массы летательного аппарата образуются сигналы в виде электродвижущих сил (ЭДС), которые поступают в микроконтроллер, где преобразуются в численные величины массы летательного аппарата и положения его центра масс относительно продольной и поперечной осей, а затем эти сигналы поступают в кабину экипажа на отображающее устройство, выполненное в виде дисплея, на котором отображается информация о массе летательного аппарата и положении его центра масс перед взлетом и запрете вылета летательного аппарата, в случае если текущее значение массы летательного аппарата больше допустимого значения и положение его центра масс перед взлетом не соответствует допустимым значениям [1].
Недостатками данного способа и устройства является возможность взлета летательного аппарата даже при наличии сигнала запрета вылета.
Технический результат изобретения заключается в повышении безопасности полетов летательного аппарата за счет исключения возможности перегруза и неправильного размещения груза в отсек летательного аппарата, уже на этапе загрузки груза, что является одним из дополнительных условий обеспечения полета летательного аппарата.
Технический результат изобретения достигается тем, что в способе информационного обеспечения процесса загрузки, контроля массы летательного аппарата перед вылетом, заключающемся в том, что размещают датчики давления непосредственно на летательном аппарате, в месте крепления стоек шасси к конструкции летательного аппарата, формируют сигналы в датчиках давления при действии на них массы летательного аппарата, преобразуют данные сигналы процессором в численные величины массы летательного аппарата и положения его центра масс относительно его продольной и поперечной осей, отображают на дисплее информацию экипажу о массе летательного аппарата и положении его центра масс относительно его продольной и поперечной осей перед взлетом, сравнивают текущую массу летательного аппарата с допустимым значением, выдают сигнал запрета вылета летательного аппарата, в случае если текущее значение массы летательного аппарата больше допустимого значения и положение его центра масс перед взлетом не соответствует допустимым значениям, дополнительно размещают n-датчики давлений равномерно по всей конструкции грузового отсека летательного аппарата, осуществляют загрузку груза в грузовой отсек летательного аппарата, определяют среднею массу груза в грузовом отсеке летательного аппарата, определяют равномерность размещения груза на основе сравнения отношений масс между средним и текущим значениями массы груза в контрольных точках грузового отсека летательного аппарата, осуществляют равномерное размещение груза в контрольных точках грузового отсека летательного аппарата на основе данной информации.
Заявляемый способ реализуется в устройстве информационного обеспечения процесса загрузки, контроля массы летательного аппарата перед вылетом, которое состоит из последовательно соединенных датчиков давления, процессора и отображающего устройства в кабине экипажа, причем процессор выполнен в виде микроконтроллера, отображающее устройство в кабине экипажа выполнено в виде дисплея, датчики давления выполнены в виде пьезоэлектрических датчиков и размещены в местах крепления стоек шасси с конструкцией летательного аппарата, при этом в датчиках давления при действии на них массы летательного аппарата образуются сигналы в виде электродвижущих сил (ЭДС), которые поступают в микроконтроллер, где преобразуются в численные величины массы летательного аппарата и положения его центра масс относительно продольной и поперечной осей, а затем эти сигналы поступают в кабину экипажа на отображающее устройство, выполненное в виде дисплея, на котором отображается информация о массе летательного аппарата и положении его центра масс перед взлетом, а также выдаче сигнала запрета вылета в случае, если текущее значения массы летательного аппарата больше допустимого значения и положение его центра масс перед взлетом не соответствует допустимым значениям, дополнительно вводятся n-датчики давления, выходы которых соединены с входами микроконтроллера, при этом датчики давления размещены равномерно по грузовому отсеку летательного аппарата, кроме того, микроконтроллер дополнительно определяет среднюю массу груза и отношений масс между средним и текущим значениями груза в отдельных точках конструкции летательного аппарата, осуществляют на основе анализа данных отношений равномерное размещение груза в грузовом отсеке летательного аппарата.
Новыми признаками, обладающими существенными отличиями по способу, являются:
1. Размещают n-датчики давлений равномерно по всей конструкции грузового отсека летательного аппарата.
2. Осуществляют загрузку груза в грузовой отсек летательного аппарата.
3. Определяют среднюю массу груза в грузовом отсеке летательного аппарата.
4. Определяют равномерность размещения груза на основе сравнения отношений масс между средним и текущим значениями массы груза в контрольных точках грузового отсека летательного аппарата.
5. Осуществляют равномерное размещение груза в грузовом отсеке летательного аппарата.
Новыми элементами, обладающими существенными отличиями по устройству, являются: n-датчики давлений, и, кроме того, дополнительно микроконтроллер определяет среднюю массу груза и отношений масс между средним и текущим значениями груза в отдельных точках конструкции летательного аппарата и связи между известными и новыми элементами.
Изобретение поясняется чертежами.
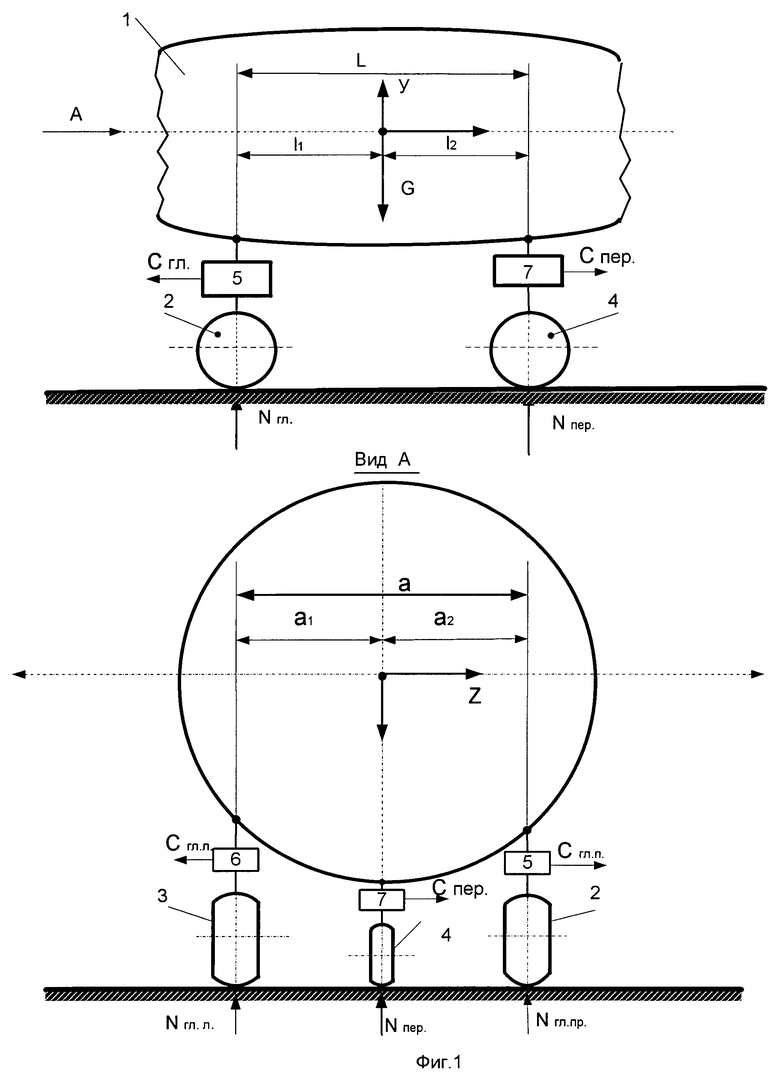
На фиг.1 представлена схема действия сил на летательный аппарат при его нахождении на земле. На фиг.2 - структурная схема устройства для реализации предлагаемого способа. Летательный аппарат (фиг.1) имеет силу тяжести G, приложенную в его центре масс (Ц.М.). Центр масс располагается внутри фюзеляжа 1. Снизу к фюзеляжу крепятся стойки шасси: основные стойки 2 и 3 и передняя стойка 4. Сила тяжести G уравновешивается реакциями от земли, действующими на основные стойки Nгл и переднюю стойку Nпер. Реакция на основные стойки состоит из двух составляющих: действующих на левую основную стойку Nгл.л и на правую основную стоику Nгл.пр.
На каждой стойке шасси, между фюзеляжем и стойкой, установлены датчики давления 5, 6 и 7, например пьезоэлектрические датчики. При давлении на них они вырабатывают сигналы Сгл.л, Сгл.пр и Спер соответственно с датчиков на главной левой, на главной правой и на передней стойках в виде напряжения (ЭДС). База шасси (расстояние между осями колес главных стоек и осью переднего колеса) обозначена через L. Расстояние от центра масс до осей колес основных стоек обозначена через l1, а до оси переднего колеса - через l2. Ширина колеи (расстояние между осями главных стоек) обозначена через «а» (вид А, фиг.1). Расстояние от центра масс до оси главной левой стойки обозначено через «a1», а до оси главной правой стойки - через «а2».
На фиг.2 датчики давления 5, 6 и 7 обозначены через Дгл.пр, Дгл.л и Дпер соответственно датчики на главной правой, на главной левой и передней стойках, с которых поступают сигналы соответственно Сгл.пр, Сгл.л и Спер. В структурную схему также входит микроконтроллер 8 и дисплей 9 в кабине летчика.
Определение правильности загрузки груза осуществляется следующим образом.
Равномерно размещают n-датчики давлений по всей конструкции грузового отсека летательного аппарата, осуществляют загрузку груза в грузовой отсек летательного аппарата, определяют среднюю массу груза в грузовом отсеке летательного аппарата, определяют равномерность размещения груза на основе сравнения отношений масс между средним и текущим значениями массы груза в контрольных точках грузового отсека летательного аппарата, осуществляют с учетом данной информации равномерное размещения груза в контрольных точках грузового отсека летательного аппарата.
Определение массы летательного аппарата и положения его центра масс осуществляется следующим образом.
На земле, когда летательный аппарат не движется, суммы проекций всех сил на каждую из координатных осей и суммы их моментов относительно этих осей равны нулю [3]. Проекции сил, действующих на летательный аппарат, будут только на ось «У». На остальные оси эти проекции будут равны нулю.
При этом сумма проекций сил на ось «У» будет равна следующему выражению:
ΣFiy=0. Nгл+Nпер-G=0;
Nгл=Nгл.л+Nгл.пр.
Тогда: Nгл.л+Nгл.пр+Nпер-G=0.
Или: 
По этому уравнению определяется масса летательного аппарата G.
Моменты будут действовать только относительно осей «X» и «Z», а относительно оси «У» они будут равны нулю.
При этом сумма моментов относительно оси «X» определяется следующим образом.
Σmx=0; -Nгл.л·а1+Nгл.пр.·а2=0
Отсюда 
Расстояние «а» известно (колея шасси).
Тогда: a2=a-a1.
Подставляем в (2) и получаем:
Nгл.пр(a-a1)=Nгл.л·a1.
Или Nгл.пр·а-Nгл.пр·а1=Nгл.л·а1.
Или Nгл.пр·a=a1(Nгл.пр+Nгл.л).
Или Nгл.пр·а=а1·Nгл.
Отсюда 
Т.е. положение центра масс в поперечном направлении определяется формулой (3).
При этом сумма моментов относительно оси «Z» определяется следующим образом.
Σmz=0. -Nгл·l1+Nпер·l2=0;
Отсюда 
База шасси L известна. Тогда l2=L-l1.
Подставляем в (4) и получаем:
Nпер(L-l1)=Nгл·l1.
Или Nпер·L-Nпер·l1=Nгл·l1.
Или Nпер·L=l1(Nпер+Nгл).
Отсюда 
Уравнение (5) определяет положение центра масс летательного аппарата в продольном направлении.
Таким образом, используя уравнение (1), определяется масса летательного аппарата М (сила тяжести G). Значения реакций Nгл.л, Nгл.пр и Nпер определяются по величинам сигналов (ЭДС) Сгл.л, Сгл.пр и Спер с датчиков давлений 5, 6 и 7. Эта масса должна быть меньше или равной ее предельному значению Мпред (Gпред), т.е. М≤Мпред (G≤Gпред). Или Nгл.л+Nгл.пр+Nпер≤Gпред. Значение Gпред для каждого летательного аппарата известно.
По уравнению (5) определяется положение центра масс вдоль продольной оси летательного аппарата. Величина l1 должна быть меньше L, т.е. l1<L. Если положение центра масс выходит за пределы базы шасси, то нарушается продольная устойчивость при разбеге.
По уравнению (3) определяется положение центра масс в поперечном направлении. Желательно, чтобы значение «a1» было близко к половине величины «а», т.е.  - иначе появляется крен.
- иначе появляется крен.
Устройство работает следующим образом.
С датчиков давления 5, 6 и 7 (Дгл.пр, Дгл.л, Дпер) снимаются сигналы (ЭДС) Сгл.пр, Сгл.л и Спер, (фиг.2), пропорциональные усилиям, действующим на эти датчики (пропорционально Nгл.пр, Nгл.л и Nпер), которые пропорциональны массе летательного аппарата (его силе тяжести), которые поступают на микроконтроллер 8.
Микроконтроллер 8 осуществляет функционирование в соответствии с алгоритмом, заключающимся в:
1) преобразовании сигналов Сгл.пр, Сгл.л, Спер соответственно в массу m1, m2, m3;
2) определении массы летательного аппарата в соответствии с выражением М=m1+m2+m3+mш, где mш - масса всех стоек шасси;
3) определении средней массы загрузочного отсека летательного аппарата, после загрузки груза в виде выражения  , где mсp - среднее значение массы груза, m1, m2, m3,…mn, значение массы груза в контрольных точках грузового отсека летательного аппарата;
, где mсp - среднее значение массы груза, m1, m2, m3,…mn, значение массы груза в контрольных точках грузового отсека летательного аппарата;
4) определении равномерности размещения груза на основе сравнения отношения масс между средним и текущим значениями в каждой контрольной точке грузового отсека летательного аппарата в соответствии с выражением mср. - m1, mср. - m2, mср. - m3,…mср. - mn;
5) сравнении данных отношений с заданным опорным значением;
6) выдаче информации о неравномерном размещении груза в каждой контрольной точки грузового отсека летательного аппарата, в случае если данное отношение больше или меньше относительно заданного значения;
7) осуществлении равномерного размещения груза в грузовом отсеке летательного аппарата;
8) формировании сигнала «Масса летательного аппарата М» и передаче его на дисплей 9, находящийся в кабине экипажа. Если М>М допустимое, то вылетать с такой массой запрещается. На дисплее загорается красный сигнал - вылет запрещается;
9) преобразовании формулы  в следующий вид:
в следующий вид: 
10) формировании сигнала «Центр масс l1» и передача его на дисплей 9;
11) анализе значений сигнала «Центр масс l1», при этом если l1<L, то на дисплее высвечивается значение l1, например, зеленым цветом. Самое благоприятное значение  с точки зрения продольной устойчивости летательного аппарата на разбеге (и пробеге, если посадка с грузом), т.е. l1≃0,5L, если l1 близка к 0,1 L и менее или к 0,9 L и более, то следует экипажу обратить особое внимание на возможность вылета с таким расположением центра масс или повышенное внимание на управление на этих режимах, если l1≤0·L или l1>L, то вылет с таким расположением центра масс невозможен: очень велика вероятность катастрофы. На дисплее загорается красный сигнал - вылет запрещен;
с точки зрения продольной устойчивости летательного аппарата на разбеге (и пробеге, если посадка с грузом), т.е. l1≃0,5L, если l1 близка к 0,1 L и менее или к 0,9 L и более, то следует экипажу обратить особое внимание на возможность вылета с таким расположением центра масс или повышенное внимание на управление на этих режимах, если l1≤0·L или l1>L, то вылет с таким расположением центра масс невозможен: очень велика вероятность катастрофы. На дисплее загорается красный сигнал - вылет запрещен;
12) преобразовании формулы  в следующий вид:
в следующий вид:
13) формировании сигнала «Центр масс a1» и передаче его на дисплей 9;
14) анализе значений сигнала «Центр масс a1, при этом если  то центр масс находится в плоскости продольной оси летательного аппарата и крена в этом случае не будет при отрыве летательного аппарата от земли, если 0,5a<a1<0,5a, то летчик должен быть готов парировать крен при отрыве летательного аппарата от земли, если a1<0·a или a1>a, то вылет с таким расположением центра масс запрещается и на дисплее загорается красный сигнал - вылет запрещается.
то центр масс находится в плоскости продольной оси летательного аппарата и крена в этом случае не будет при отрыве летательного аппарата от земли, если 0,5a<a1<0,5a, то летчик должен быть готов парировать крен при отрыве летательного аппарата от земли, если a1<0·a или a1>a, то вылет с таким расположением центра масс запрещается и на дисплее загорается красный сигнал - вылет запрещается.
Таким образом, в соответствии с данным алгоритмом предварительно осуществляется контроль загрузки груза в летательный аппарат, а в момент вылета летчик нажимает на дисплее соответствующую кнопку, чтобы узнать массу летательного аппарата и расположение его центра масс, при этом если М>m допустимое, l1≤0·L или l1≥L, a1<0·a или a1>a, то на дисплее загорается красный сигнал. В остальных случаях значения этих величин высвечиваются зеленым цветом.
Источники информации
1. Патент РФ №2400405 от 27.09.2010 г.
3. Тарг С.М. Краткий курс теоретической механики. - М.: Наука, 1970. - С.117.
4. Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике для поступающих в вузы и для самообразования. - М.: Наука, 1989. - С.42, 51-53.
Изобретение относится к авиационной технике, в частности к бортовым информационно-вычислительным системам летательного аппарата. Способ информационного обеспечения процесса загрузки, контроля массы летательного аппарата перед вылетом заключается в том, что на летательном аппарате размещают датчики давления с последующим формированием в них сигналов. Сигналы преобразуют в величины массы летательного аппарата и положения его центра масс относительно продольной и поперечной осей. Отображают информацию экипажу о массе и положении центра масс летательного аппарата перед взлетом на дисплее. Также сравнивают текущую массу летательного аппарата с допустимым значением и выдают соответствующий сигнал. Размещают датчики давлений по всему грузовому отсеку летательного аппарата и определяют среднюю массу груза и равномерность его размещения. С учетом данной информации равномерно размещают груз в грузовом отсеке. Устройство информационного обеспечения процесса загрузки, контроля массы летательного аппарата перед вылетом содержит соединенные датчики давления, процессор и отображающее устройство в кабине экипажа. Также имеются n-датчики давления, которые размещены равномерно в грузовом отсеке летательного аппарата. Решение направлено на повышение безопасности полетов. 2 н. и 2 з.п. ф-лы, 2 ил.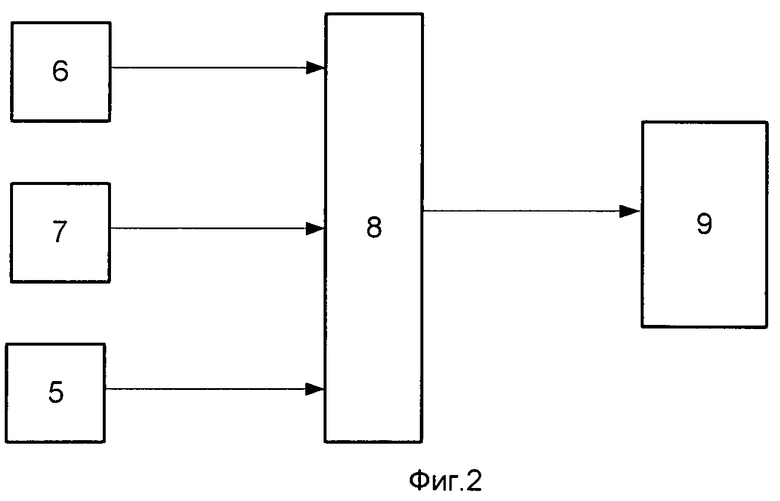
1. Способ информационного обеспечения процесса загрузки, контроля массы летательного аппарата перед вылетом, заключающийся в размещении датчиков давления, непосредственно на летательном аппарате, в месте крепления стоек шасси к конструкции летательного аппарата, формировании в датчиках давления, при действии на них массы летательного аппарата, сигналов преобразования в численные величины массы летательного аппарата и положения его центра масс относительно продольной и поперечной осей процессором, отображении информации экипажу о массе летательного аппарата и положении его центра масс относительно продольной и поперечной осей перед взлетом на дисплее, сравнение текущей массы летательного аппарата с допустимым значением, выдачи сигнала запрета вылета летательного аппарата в случае, если текущее значение массы летательного аппарата и положение его центра масс перед взлетом больше допустимого значения, отличающийся тем, что дополнительно равномерно размещают n-датчики давлений по всей конструкции грузового отсека летательного аппарата, осуществляют загрузку груза в грузовой отсек летательного аппарата, определяют среднюю массу груза в грузовом отсеке летательного аппарата, определяют равномерность размещения груза на основе сравнения отношений масс между средним и текущим значениями массы груза в контрольных точках грузового отсека летательного аппарата, осуществляют с учетом данной информации равномерное размещение груза в контрольных точках грузового отсека летательного аппарата.
2. Устройство информационного обеспечения процесса загрузки, контроля массы летательного аппарата перед вылетом, содержащее последовательно соединенные датчики давления, процессор и отображающее устройство в кабине экипажа, причем процессор выполнен в виде микроконтроллера, отображающее устройство в кабине экипажа выполнено в виде дисплея, датчики давления выполнены в виде пьезоэлектрических датчиков и размещены в местах крепления стоек шасси с конструкцией летательного аппарата, при этом в датчиках давления, при действии на них массы летательного аппарата, образуются сигналы в виде электродвижущих сил (ЭДС), которые поступают в микроконтроллер, где преобразуются в численные величины массы летательного аппарата и положения его центра масс относительно продольной и поперечной осей, а затем эти сигналы поступают в кабину экипажа на отображающее устройство, выполненное в виде дисплея, на котором отображается информация о массе летательного аппарата, положение его центра масс перед взлетом и запрет вылета, в случае, если текущее значение массы летательного аппарата больше допустимого значения и положение его центра масс перед взлетом не соответствует допустимым значениям, отличающееся тем, что дополнительно вводятся n-датчики давления, выходы которых соединены с входами микроконтроллера, при этом n-датчики давлений размещены равномерно по грузовому отсеку летательного аппарата, микроконтроллер дополнительно определяет среднюю массу груза и отношения масс между средним и текущим значениями груза в отдельных точках конструкции летательного аппарата, на основе анализа данных отношений осуществляют равномерное размещение груза в грузовом отсеке летательного аппарата.
3. Устройство информационного обеспечения процесса загрузки летательного аппарата по п.2, отличающееся тем, что алгоритм функционирования микроконтроллера заключается в преобразовании сигналов с выходов датчиков давления Сгл.пр, Сгл.л, Спер микроконтроллером в сигналы m1, m2, m3 соответственно, определение массы летательного аппарата, положение центра масс относительно продольной и поперечной осей летательного аппарата, определение массы летательного аппарата осуществляется на основе суммирования всех значений масс М=m1+m2+m3+mш, где mш - масса всех стоек шасси, формирование сигнала «Масса летательного аппарата М» и выдачи его на дисплей, находящийся в кабине экипажа, сравнение текущей массы летательного аппарата с допустимым значением, выдачи сигнала запрета вылета при М>М допустимое, определение координаты центра массы вдоль продольной оси летательного аппарата в соответствии с выражением:  где L - база шасси летательного аппарата, формирование сигнала «Центр масс l1» и выдачи его на дисплей, находящийся в кабине экипажа, сравнение полученного значения со значением L, выдачи рекомендаций экипажу о возможности взлета при условии, если положение центра масс вдоль продольной оси меньше базы шасси летательного аппарата l1<L, при этом положение центра масс летательного аппарата является оптимальным в случае
где L - база шасси летательного аппарата, формирование сигнала «Центр масс l1» и выдачи его на дисплей, находящийся в кабине экипажа, сравнение полученного значения со значением L, выдачи рекомендаций экипажу о возможности взлета при условии, если положение центра масс вдоль продольной оси меньше базы шасси летательного аппарата l1<L, при этом положение центра масс летательного аппарата является оптимальным в случае  , на дисплее высвечивается зеленым цветом значение l1, если l1 близка к 0,1 L и менее или к 0,9 L и более, то экипажу следует обратить особое внимание на возможность вылета с таким расположением центра масс или повышенное внимание на управление на этих режимах, выдачи рекомендаций летчику вылет запрещен, если l1≤0 или l1>1, на дисплее загорается красный цвет, определение координат центра массы вдоль поперечной оси летательного аппарата в соответствии с выражением:
, на дисплее высвечивается зеленым цветом значение l1, если l1 близка к 0,1 L и менее или к 0,9 L и более, то экипажу следует обратить особое внимание на возможность вылета с таким расположением центра масс или повышенное внимание на управление на этих режимах, выдачи рекомендаций летчику вылет запрещен, если l1≤0 или l1>1, на дисплее загорается красный цвет, определение координат центра массы вдоль поперечной оси летательного аппарата в соответствии с выражением:  где а - колея шасси летательного аппарата, формирование сигнала «Центр масс а1» и выдачи его на дисплей, находящийся в кабине экипажа, сравнение полученной координаты со значением а, выдачи рекомендаций летчику о возможности взлета при условии a1<a, и на дисплее высвечивается значение a1, зеленым цветом, при этом значение положения центра масс вдоль поперечной оси является наиболее оптимальным при условии
где а - колея шасси летательного аппарата, формирование сигнала «Центр масс а1» и выдачи его на дисплей, находящийся в кабине экипажа, сравнение полученной координаты со значением а, выдачи рекомендаций летчику о возможности взлета при условии a1<a, и на дисплее высвечивается значение a1, зеленым цветом, при этом значение положения центра масс вдоль поперечной оси является наиболее оптимальным при условии  если 0,5a<a1<0,5a, то летчик должен быть готов парировать крен при отрыве летательного аппарата от земли, выдачи рекомендаций летчику о невозможности взлета, если a1<0·a или a1>a, и на дисплее загорается красный цвет.
если 0,5a<a1<0,5a, то летчик должен быть готов парировать крен при отрыве летательного аппарата от земли, выдачи рекомендаций летчику о невозможности взлета, если a1<0·a или a1>a, и на дисплее загорается красный цвет.
4. Устройство информационного обеспечения процесса загрузки летательного аппарата по п.3, отличающееся тем, что микроконтроллер дополнительно в соответствии с алгоритмом функционирования определяет среднюю массу загрузочного отсека летательного аппарата, после загрузки груза в виде выражения:  где mср - среднее значение массы груза m1, m2, m3,…mn, значение массы груза в контрольных точках грузового отсека летательного аппарата, определяет отношения масс между средним и текущими значениями в каждой контрольной точке грузового отсека летательного аппарата в соответствии с выражением mср - m1, mср - m2, mср - m3,…mср - mn, сравнение данных отношений с заданным значением, выдачу информации о неравномерном размещении груза в каждой контрольной точке грузового отсека летательного аппарата, в случае если данное отношение больше или меньше относительно заданного значения.
где mср - среднее значение массы груза m1, m2, m3,…mn, значение массы груза в контрольных точках грузового отсека летательного аппарата, определяет отношения масс между средним и текущими значениями в каждой контрольной точке грузового отсека летательного аппарата в соответствии с выражением mср - m1, mср - m2, mср - m3,…mср - mn, сравнение данных отношений с заданным значением, выдачу информации о неравномерном размещении груза в каждой контрольной точке грузового отсека летательного аппарата, в случае если данное отношение больше или меньше относительно заданного значения.
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА, ПОЛОЖЕНИЯ ЕГО ЦЕНТРА МАСС И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2400405C1 |
| US 2006111868 A1, 25.05.2006 | |||
| US 4225926 A, 30.09.1980 | |||
| US 2007012106 A1, 18.01.2007 | |||
| Кипоразрыхлитель-смеситель | 1953 |
|
SU100615A1 |
| Приспособление для отделения грубого помола от мелкого при быстроходных угольных мельницах | 1928 |
|
SU11885A1 |
| US 2004226996 A1, 18.11.2004. | |||

