Изобретение относится к измерительной технике и может быть использовано, в частности, в прикладной метеорологии для оперативного дистанционного измерения скорости и направления ветра.
Известны способы измерения скорости газового потока и атмосферного ветра, основанные на регистрации (контактным или дистанционным методом) случайных реализаций сигналов в двух точках потока и дальнейшем анализе измеренных случайных реализациий или результатов их корреляционной обработки (см, например, [1-6]). Для оперативного дистанционного измерения скорости и направления атмосферного ветра перспективными являются методы лазерного дистанционного зондирования [2-6].
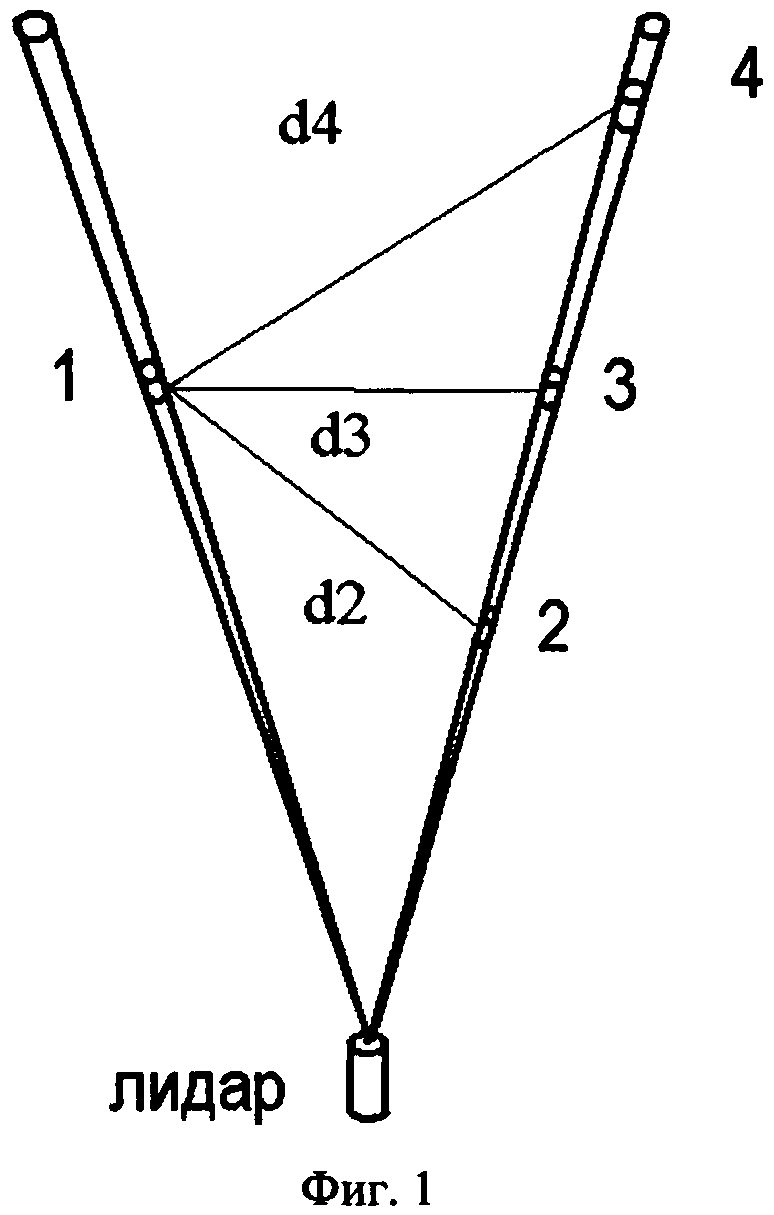
Наиболее близким к предлагаемому способу является способ оперативного дистанционного определения скорости ветра с помощью лидара [2], заключающийся в том, что атмосферу облучают двумя зондирующими пучками, распространяющимися с малым угловым расстоянием между ними, регистрируют сигналы из рассеивающих объемов в атмосфере, при этом количество рассеивающих объемов n>2 (вид сверху для варианта четырех рассеивающих объемов показан на фиг.1) выбирают исходя из требуемой точности Δφ определения направления ветра  , определяют минимальное значение
, определяют минимальное значение  взаимно-структурных функций
взаимно-структурных функций  между сигналом U1(t) из рассеивающего объема 1 и сигналами Ui(t), i=2…n из рассеивающих объемов 2…i…, n принимают за направление ветра направление между рассеивающим объемом 1 и объемом с наименьшим минимальным значением
между сигналом U1(t) из рассеивающего объема 1 и сигналами Ui(t), i=2…n из рассеивающих объемов 2…i…, n принимают за направление ветра направление между рассеивающим объемом 1 и объемом с наименьшим минимальным значением  взаимно-структурной функции, определяют величину и знак скорости ветра по положению минимума взаимно-структурной функции сигналов для этих рассеивающих объемов и расстоянию между этими объемами.
взаимно-структурной функции, определяют величину и знак скорости ветра по положению минимума взаимно-структурной функции сигналов для этих рассеивающих объемов и расстоянию между этими объемами.
Недостаток способа [2] - из-за использования только двух лазерных лучей расстояния (измерительные базы) между рассеивающим объемом 1 и рассеивающими объемами 2…i…n являются неодинаковыми (это хорошо видно из фиг.1: расстояния d2, d3 и d4 существенно различаются между собой) и независящими от характеристик атмосферы. Выбор измерительных баз неодинаковыми и независящими от характеристик атмосферы может приводить к существенным ошибкам определения скорости ветра.
Повысить точность можно тем, что до начала измерений атмосферу зондируют для определения размеров аэрозольных неоднородностей атмосферы, затем облучают пучком, сканирующим в горизонтальной плоскости в пределах небольшого угла (единицы градусов), регистрируют сигналы из рассеивающих объемов в атмосфере, при этом количество рассеивающих объемов выбирают исходя из требуемой точности Δφ определения направления ветра:  (на фиг.2 показано расположение трех из n рассеивающих объемов для возможных направлений ветра: НВ1, НВ2, HB3…HBi…HBn), размеры измерительных баз (расстояний между рассеивающими объемами атмосферы 1 и 2НВ1, 2НВ2, 2HB3…2HBi…2HBn) выбирают одинаковыми и равными величине, адаптивно изменяемой и определяемой размерами аэрозольных неоднородностей атмосферы и скоростью ветра на момент измерений, определяют минимальное значение
(на фиг.2 показано расположение трех из n рассеивающих объемов для возможных направлений ветра: НВ1, НВ2, HB3…HBi…HBn), размеры измерительных баз (расстояний между рассеивающими объемами атмосферы 1 и 2НВ1, 2НВ2, 2HB3…2HBi…2HBn) выбирают одинаковыми и равными величине, адаптивно изменяемой и определяемой размерами аэрозольных неоднородностей атмосферы и скоростью ветра на момент измерений, определяют минимальное значение  взаимно-структурных функций
взаимно-структурных функций  между сигналом U1(t) из рассеивающего объема 1 и сигналами U2i(t), i=1…n из рассеивающих объемов 2HB1…2HBi…2HBn, принимают за направление ветра направление между рассеивающим объемом 1 и объемом с наименьшим минимальным значением
между сигналом U1(t) из рассеивающего объема 1 и сигналами U2i(t), i=1…n из рассеивающих объемов 2HB1…2HBi…2HBn, принимают за направление ветра направление между рассеивающим объемом 1 и объемом с наименьшим минимальным значением  взаимно-структурной функции, определяют величину и знак скорости ветра по положению минимума взаимно-структурной функции
взаимно-структурной функции, определяют величину и знак скорости ветра по положению минимума взаимно-структурной функции  сигналов для этих рассеивающих объемов и расстоянию между этими объемами.
сигналов для этих рассеивающих объемов и расстоянию между этими объемами.
Для измерения характеристик атмосферных неоднородностей проводят предварительное (до начала измерений) зондирование атмосферы вдоль лазерного луча (центрального луча а на фиг.2). Использование лазерного источника с короткими импульсами и сканирования узкого лазерного пучка в горизонтальной плоскости позволяет реализовать измерения для измерительных баз с произвольной ориентацией и произвольного размера и адаптивно (в соответствии с размерами аэрозольных неоднородностей атмосферы и скоростью ветра на момент измерений) изменять размер измерительных баз при изменении атмосферных условий.
На фиг.2 показан вид сверху для предлагаемой схемы зондирования; а, б, в, г - положения в пространстве сканирующего лазерного луча, для которых расстояния между рассеивающим объемом 1 и рассеивающими объемами 2НВ1, 2НВ2 и 2НВ3 (на рисунке показаны три из n рассеивающих объемов 2HB1…2HBi…2HBn) одинаковы и равны некоторой оптимальной величине, определяемой условиями на атмосферной трассе.
Наличие отличительных признаков (предварительное зондирование для определения размеров аэрозольных неоднородностей атмосферы и использование сканирующего пучка для адаптивного изменения измерительных баз) указывает на соответствие критерию "новизна".
Указанные отличительные признаки неизвестны в научно-технической и патентной литературе и поэтому предложенное техническое решение (как совокупность реализованных указанных признаков) соответствует критерию "изобретательский уровень".
Устройство, реализующее предлагаемый способ, работает следующим образом.
Лидар содержит лазерный источник излучения, передающую оптическую систему, приемную оптическую систему, фотоприемник и блок обработки. Излучение лазерного источника проходит передающую оптическую систему, которая формирует зондирующий пучок, сканирующий в горизонтальной плоскости в пределах небольшого (единицы градусов) угла.
Аэрозоль, всегда содержащийся в атмосфере, рассеивает излучение в сторону лидара (размеры рассеивающих объемов определяются углом расходимости зондирующих пучков, их расстоянием от лидара и длительностью импульса источника излучения).
Принимаемое излучение проходит через приемную оптическую систему, регистрируется фотоприемником и поступает в блок обработки для определения направления и величины скорости ветра.
В блоке обработки лидара проводят последовательно следующие операции.
1. Определяют (по результатам предварительного зондирования атмосферы вдоль лазерного луча (центрального луча а на фиг.2)) размеры аэрозольных неоднородностей атмосферы [4,5].
2. Определяют для времени наблюдения tH оптимальный размер d измерительных баз для существующих условий на атмосферной трассе.
3. Определяют (по результатам измерений в течение времени наблюдения tH) взаимно-структурные функции  между сигналом U1(t) из рассеивающего объема 1 и сигналами U2i(t) из рассеивающих объемов 2НВ1, 2НВ2, 2HB3…2HBi…2HBn.
между сигналом U1(t) из рассеивающего объема 1 и сигналами U2i(t) из рассеивающих объемов 2НВ1, 2НВ2, 2HB3…2HBi…2HBn.
4. Определяют положение минимумов τi взаимно-структурных функций S1,2i(τ), i=1…n и значения  этих взаимно-структурных функций в их минимумах.
этих взаимно-структурных функций в их минимумах.
5. Определяют минимальное (среди найденных значений  ) значение
) значение  .
.
6. За направление атмосферного ветра принимают направление между рассеивающим объемом 1 и объемом 2HBi min с наименьшим минимальным значением  .
.
7. Величину и знак скорости ветра определяют по положению τi min минимума взаимно-структурной функции  между сигналами из рассеивающего объема 1 и объема 2HBi min
между сигналами из рассеивающего объема 1 и объема 2HBi min
 .
.
В результате работы блока обработки формируют (с заданной дискретностью) массив данных о величине и направлении ветра вдоль трассы зондирования.
Для оценки работоспособности предлагаемого способа оперативного измерения скорости и направления атмосферного ветра проводилось математическое моделирование.
Выбор оптимального размера d измерительной базы для корреляционного метода измерения скорости ветра обсуждался в [5]. Показано, что оптимальным является выбор измерительной базы d порядка размера аэрозольных неоднородностей атмосферы. Однако этот вывод был сделан для достаточно больших времен наблюдения, когда аэрозольные неоднородности могут разрушаться и, пройдя первую точку измерительной базы, могут не дойти до второй точки измерительной базы.
Вопрос о выборе оптимального размера измерительной базы в условиях оперативных измерений (когда время измерения мало - единицы секунд) остается не ясным. В этом случае аэрозольные неоднородности атмосферы в большинстве случаев не успевают разрушаться [5], проходя от первой до второй точки измерительной базы (для малой измерительной базы), и оптимальный размер измерительной базы должен определяться не только размером аэрозольных неоднородностей, но и временем наблюдения, требуемой минимальной измеряемой скоростью ветра и отношением сигнал/шум. При этом сами размеры аэрозольные неоднородности атмосферы (и время их жизни, зависящее от размера неоднородностей) изменяются в широком диапазоне в зависимости от атмосферных условий [5]. Поэтому необходимым является предварительное зондирование атмосферы для оперативной оценки размера аэрозольных неоднородностей вдоль трассы зондирования.
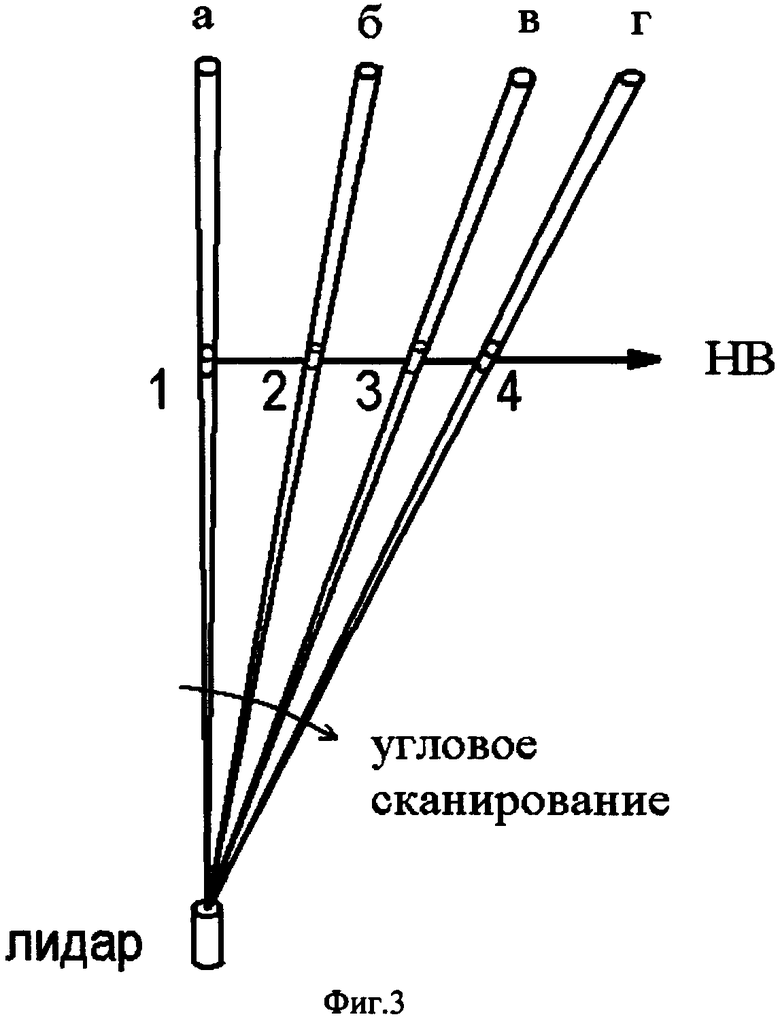
В наиболее простом случае, когда направление ветра известно, единственным параметром, который надо определить, является скорость ветра. На фиг.3 для этого случая показана геометрическая схема измерений корреляционного ветрового лидара с малой измерительной базой, короткими зондирующими импульсами и сканирующим в горизонтальной плоскости лазерным пучком. На фиг.3 Л - лидар; НВ - направление ветра; а, б, в, г - положения в пространстве сканирующего лазерного луча; 1 - положение первой точки измерительной базы; 2, 3, 4 - возможные положения второй точки измерительной базы.
Лидар Л облучает атмосферу узким лазерным пучком, сканирующим в горизонтальной плоскости в пределах некоторого небольшого угла сканирования (порядка единиц градусов). Лазерный импульс (для каждого положения оптической оси лидара при сканировании) рассеивается на атмосферном аэрозоле (во всех направлениях, в том числе и в направлении назад на лидар) и поступает в приемную систему лидара. Принимаемое излучение стробируется по дальности, так что регистрируемые значения сигналов (для каждого положения оптической оси лидара при сканировании) соответствуют сигналам от последовательности локальных объемов измерения вдоль соответствующей (а, б, в, г, …) трассы зондирования.
При известном направлении ветра измерительная база должна располагаться вдоль этого направления [5]. Пусть первая точки измерительной базы 1 находится на некотором расстоянии от лидара. Тогда вторая точки измерительной базы должна находиться на линии НВ на некотором оптимальном (с точки зрения точности измерения скорости ветра) расстоянии от точки 1 (в одной из точек 2, 3, 4 …).
Для определения оптимального размера измерительной базы проводилось математическое моделирование и исследование зависимости погрешности измерения скорости ветра от размера измерительной базы при известном направлении ветра.
Для математического моделирования был создан комплекс программ, имитирующий работу лазерного измерителя скорости атмосферного ветра. Использовалась гипотеза замороженности неоднородностей атмосферы во время проведения измерений, т.е. считалось, что неоднородности переносятся в атмосфере под действием среднего ветра, не изменяя своей формы. В этом случае корреляционный метод определения скорости ветра V может быть упрощен [5]:

где d - измерительная база (расстояние от точки 1 до второй точки базы (одной из точек 2, 3, 4 …) вдоль линии НВ), τ - временной сдвиг максимума взаимной корреляционной функции двух сигналов, регистрируемых от рассеивающих объемов атмосферы в точке 1 и второй точке базы.
Использование вместо корреляционной функции структурной функции дает меньшие погрешности измерения скорости ветра, поэтому при проведении моделирования для определения τ была использована структурная функция сигналов (временной сдвиг τ соответствует минимуму структурной функции двух сигналов, регистрируемых от рассеивающих объемов атмосферы).
Математическое моделирование проводилось для разных размеров аэрозольных неоднородностей атмосферы, при различном отношении сигнал/шум в широком диапазоне скоростей ветра.
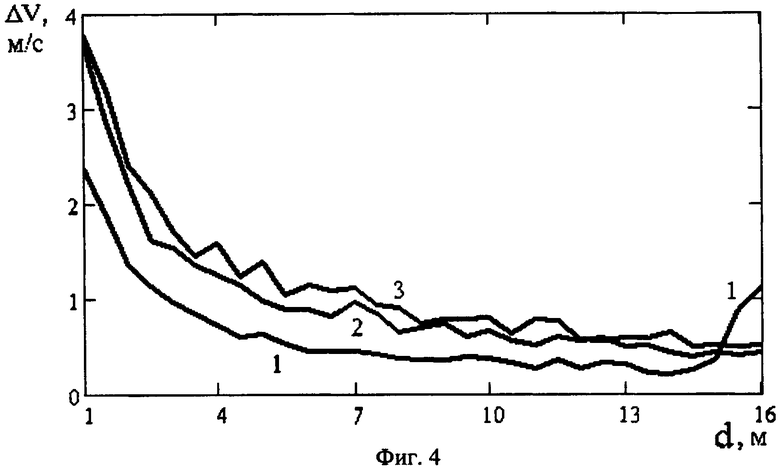
На фиг.4 представлен пример зависимости средних (по 500 реализациям полей аэрозольных неоднородностей атмосферы) модулей погрешностей измерения скорости ветра ΔV от величины измерительной базы d для размера аэрозольных неоднородностей 5 м (измерительная база вдоль направления ветра). Время измерения составляло 5 с. Параметры атмосферных неоднородностей соответствовали условиям горизонтальной трассы в приземном слое атмосферы. Отношение сигнал/шум равно 5. На рисунке: 1 - скорость ветра 4 м/с, 2-8 м/с, 3-12 м/с.
Результаты математического моделирования, приведенные на фиг.4, показывают, что наименьшие погрешности измерения скорости ветра получаются при выборе измерительной базы d~14 м.
Выбор необходимого размера измерительной базы при произвольном (известном) направлении ветра обеспечивается возможностью локализации в пространстве локальных объемов измерения за счет углового сканирования узкого лазерного пучка и использования лазера с короткими зондирующими импульсами.
В условиях реальных измерений нельзя заранее знать: справедлива или нет гипотеза замороженности неоднородностей атмосферы во время проведения измерений. Поэтому заранее нельзя определиться, какую измерительную базу лучше (в смысле обеспечения наименьших погрешностей измерения скорости ветра) использовать: базу, выбранную, как изложено выше (для условий замороженности неоднородностей), или базу, равную размеру аэрозольных неоднородностей атмосферы (для условий, когда аэрозольные неоднородности могут разрушаться за время наблюдения).
Однако этот вопрос можно решить оперативно в процессе измерений. Результаты проведенного математического моделирования показывают, что погрешности измерения скорости ветра зависят от некоторого параметра Λ=Δmin/d1/2, где Δmin - минимальное значение структурной функции реализации сигналов, измеренных в двух точках измерительной базы (т.е. значение структурной функции при наилучшем совмещении реализации сигналов, для которого определяется временной сдвиг, используемый для измерения скорости ветра); d - размер измерительной базы. Поэтому методика оперативного выбора измерительной базы может быть следующая.
1. До начала измерений проводится зондирование атмосферы вдоль начального положения а оптической оси лидара. Полученная реализация сигнала (она определяется пространственной реализацией показателя обратного аэрозольного рассеяния атмосферы вдоль трассы а) используется для оценки характерного размера аэрозольных неоднородностей атмосферы.
2. Проводятся измерения реализации сигналов для измерительной базы А, выбранной, как изложено выше (по минимуму погрешностей измерения скорости ветра), и для измерительной базы Б, равной размеру аэрозольных неоднородностей атмосферы.
3. Вычисляется параметр Λ для измерительной базы А и базы Б.
4. Выбирается измерительная база, для которой параметр Λ меньше.
В Таблице 1 приведены результаты математического моделирования. Здесь показаны средние (по 500 реализациям полей аэрозольных неоднородностей атмосферы) модули погрешностей измерения скорости ветра ΔV для измерительной базы А (равной 14 м) и измерительной базы Б (равной размеру неоднородностей).
Таблица 1 получена для размера неоднородностей 5 м и для скоростей ветра V=4 м/с, V=8 м/с и V=12 м/с при отношении сигнал/шум (с/ш), равным 2, 5 и 50, и времени измерения 5 с. В скобках даны значения параметра Λ. Таблица 1 иллюстрирует преимущество выбора размера измерительной базы А над выбором измерительной базы Б при проведении оперативных измерений скорости ветра (в случае, когда неоднородности не разрушаются и переносятся в атмосфере под действием ветра). Видно, что по величине Λ можно судить о погрешностях измерения скорости ветра ΔV: база с меньшим Λ обеспечивает меньшие погрешности измерения скорости ветра.
В общем случае, когда направление ветра неизвестно, его надо определять совместно со скоростью ветра. Схема, которая может обеспечить одновременное оперативное измерение скорости и направления ветра, представлена на фиг.2. На фигуре: НВ1, НВ2, НВ3, … - направления измерительных баз, т.е. возможных направлений ветра (их число определяется требуемой точностью измерения направления ветра). Для каждого направления НВ1, НВ2, НВ3, … проводится цикл обработки результатов измерений описанный выше. За направление ветра принимается направление, для которого реализуется самый меньший минимум структурных функций, построенных с использованием сигналов, регистрируемых в точках измерительных баз. При этом число измерительных баз (количество рассеивающих объемов 2НВn) выбирают исходя из требуемой точности Δφ определения направления ветра  . Размеры измерительных баз (расстояния между рассеивающим объемом 1 и рассеивающими объемами атмосферы 2НВ1, 2НВ2, 2HB3…2HBi…2HBn) выбирают одинаковыми и равными величине, адаптивно изменяемой и определяемой размерами аэрозольных неоднородностей.
. Размеры измерительных баз (расстояния между рассеивающим объемом 1 и рассеивающими объемами атмосферы 2НВ1, 2НВ2, 2HB3…2HBi…2HBn) выбирают одинаковыми и равными величине, адаптивно изменяемой и определяемой размерами аэрозольных неоднородностей.
Пример результатов математического моделирования для неизвестного направления атмосферного ветра представлен в таблице 2. Здесь приведены результаты математического моделирования средних модулей погрешностей измерения скорости (ΔV) и направления (Δα) ветра. Размер аэрозольных неоднородностей атмосферы задавался равным 5 м, число направлений измерительных баз (в секторе 180°) равно 19, время наблюдения tH=5 с. В таблице приведены результаты математического моделирования для измерительной базы 5 м (в [4,5] рекомендуется выбирать измерительную базу порядка размера аэрозольных неоднородностей атмосферы) и адаптивно выбираемой базы (из двух вариантов - базы 5 м и базы 14 м).
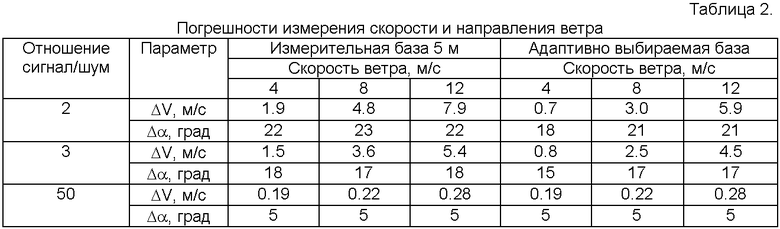
Результаты моделирования показывают, что описанный способ позволяет уменьшить погрешности ΔV измерения скорости ветра. При небольшом отношении сигнал/шум (на больших расстояниях от лидара) погрешности измерения скорости ветра могут уменьшаться в 1,5-2 раза.
Таким образом, описанный способ позволяет обеспечить увеличение точности оперативных дистанционных измерений скорости ветра.
Источники информации
1. Заявка РСТ WO 2006/063463. Optical transit time velocimeter. International Publication Date 22.06.2006. International Patent Classification G01P 5/20, G01P 5/26.
2. Патент RU 2404435. Способ оперативного дистанционного определения скорости и направления ветра. Дата действия патента 04.06.2009. МПК G01P 5/22, G01P 5/26, G01S 17/95.
3. Armstrong R.L., Mason J.B., Barber Т. Detection of atmospheric aerosol flow using a transit-time lidar velocimeter // Applied Optics. - 1976. - V.15. - N 11. - P.2891-2895.
4. Применение корреляционных методов в атмосферной оптике / В.М.Орлов, Г.Г.Матвиенко, И.В.Самохвалов и др. - Новосибирск: Наука, 1983. - 160 с.
5. Корреляционные методы лазерно-локационных измерений скорости ветра / Г.Г.Матвиенко, Г.О.Заде, Э.С.Фердинандов и др. - Новосибирск: Наука, 1985. - 223 с.
6. Матвиенко Г.Г., Самохвалов И.В., B.C.Рыбалко и др. Оперативное определение компонентов скорости ветра с помощью лидара // Оптика атмосферы и океана. - 1988. - T.1. - N 2. - С.68-72.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНОГО ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2009 |
|
RU2404435C1 |
| ЛАЗЕРНЫЙ ДИСТАНЦИОННЫЙ СПОСОБ ОЦЕНКИ МГНОВЕННОЙ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2011 |
|
RU2494422C2 |
| СПОСОБ ЛАЗЕРНОГО ДИСТАНЦИОННОГО ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2010 |
|
RU2465607C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ВЫБРОСА | 1991 |
|
RU2028007C1 |
| Способ измерения концентрации аэрозольных частиц в атмосфере | 2017 |
|
RU2672188C1 |
| Способ определения вертикального профиля интенсивности оптической турбулентности в атмосфере | 2022 |
|
RU2789631C1 |
| Лидарный способ определения интенсивности оптической турбулентности | 2021 |
|
RU2777294C1 |
| РАДИОЛОКАЦИОННО-ТОМОГРАФИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРОВЫХ ПОТОКОВ | 2023 |
|
RU2805031C1 |
| ЛИДАРНЫЙ КОМПЛЕКС КОНТРОЛЯ ЗАГРЯЗНЕНИЯ ВОЗДУХА | 1991 |
|
RU2022251C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕРФЕРЕНЦИОННОГО СИГНАЛА В ДОПЛЕРОВСКИХ ЛИДАРАХ | 2010 |
|
RU2434247C1 |
Изобретение относится к измерительной технике и может быть использовано в прикладной метеорологии для оперативного дистанционного измерения скорости и направления ветра. Технический результат -повышение точности в оперативных дистанционных измерениях скорости и направления ветра. Для этого до начала измерений атмосферу зондируют с целью определения размеров аэрозольных неоднородностей атмосферы, затем облучают пучком, сканирующим в горизонтальной плоскости в пределах небольшого угла (единицы градусов), регистрируют сигналы из рассеивающих объемов в атмосфере, при этом количество рассеивающих объемов выбирают исходя из требуемой точности Δφ определения направления ветра  , размеры измерительных баз выбирают одинаковыми и равными величине, адаптивно изменяемой и определяемой размерами аэрозольных неоднородностей атмосферы и скоростью ветра, определяют минимальное значение
, размеры измерительных баз выбирают одинаковыми и равными величине, адаптивно изменяемой и определяемой размерами аэрозольных неоднородностей атмосферы и скоростью ветра, определяют минимальное значение  взаимно-структурных функций
взаимно-структурных функций  между сигналом U1(t) из рассеивающего объема 1 и сигналами U2i(t), i=1…n из рассеивающих объемов 2HB1…2HBi…2HBn, принимают за направление ветра направление между рассеивающим объемом 1 и объемом с наименьшим минимальным значением
между сигналом U1(t) из рассеивающего объема 1 и сигналами U2i(t), i=1…n из рассеивающих объемов 2HB1…2HBi…2HBn, принимают за направление ветра направление между рассеивающим объемом 1 и объемом с наименьшим минимальным значением  взаимно-структурной функции, определяют величину и знак скорости ветра по положению минимума взаимно-структурной функции
взаимно-структурной функции, определяют величину и знак скорости ветра по положению минимума взаимно-структурной функции  сигналов для этих рассеивающих объемов и расстоянию между этими объемами. 2 табл., 4 ил.
сигналов для этих рассеивающих объемов и расстоянию между этими объемами. 2 табл., 4 ил.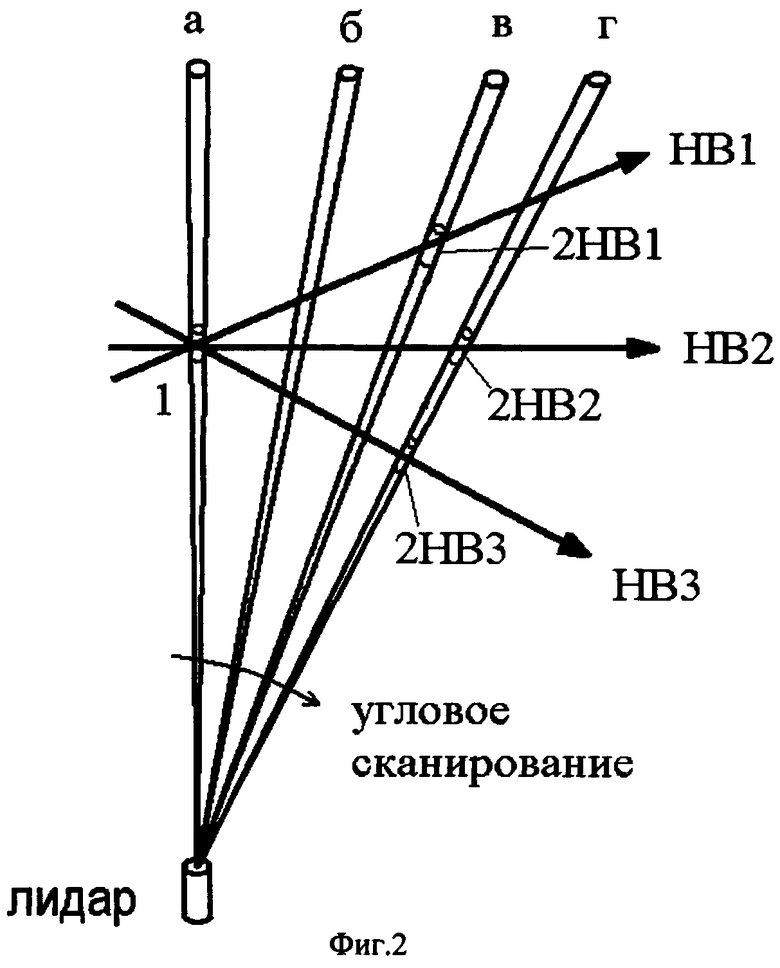
Способ оперативного дистанционного измерения скорости и направления ветра, заключающийся в том, что до начала измерений атмосферу зондируют для определения размеров аэрозольных неоднородностей атмосферы, затем облучают пучком, сканирующим в горизонтальной плоскости в пределах небольшого угла, регистрируют сигналы из рассеивающих объемов в атмосфере, при этом количество рассеивающих объемов выбирают, исходя из требуемой точности Δφ определения направления ветра: , размеры измерительных баз выбирают одинаковыми и равными величине, адаптивно изменяемой и определяемой размерами аэрозольных неоднородностей атмосферы и скоростью ветра, определяют минимальное значение взаимно-структурных функций между сигналом U1(t) из рассеивающего объема 1 и сигналами U2i(t), i=1…n из рассеивающих объемов 2HB1,…2HBi,…2HBn, принимают за направление ветра направление между рассеивающим объемом 1 и объемом с наименьшим минимальным значением  взаимно-структурной функции, определяют величину и знак скорости ветра по положению минимума взаимно-структурной функции сигналов для этих рассеивающих объемов и расстоянию между этими объемами.
взаимно-структурной функции, определяют величину и знак скорости ветра по положению минимума взаимно-структурной функции сигналов для этих рассеивающих объемов и расстоянию между этими объемами.
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ВЫБРОСА | 1991 |
|
RU2028007C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАССЕИВАЮЩЕГО ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОГО ОБЪЕКТА И ДОПЛЕРОВСКИЙ НИЗКОКОГЕРЕНТНЫЙ ЛИДАР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365942C1 |
| СПОСОБ ОПЕРАТИВНОГО ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2009 |
|
RU2404435C1 |
| US 6535158 B2, 18.03.2003 | |||
| Полосовой клапан | 1985 |
|
SU1250762A2 |

