Предлагаемое изобретение относится к системам сопровождения воздушных судов и может быть использовано для обнаружения, измерения координат и распознавания целей по сигналам наземных запросчиков и бортовых ответчиков располагаемых на базе сети сотовой связи GSM. Техническим результатом предлагаемого изобретения является улучшение тактико-технических характеристик, а именно расширение поля наблюдения воздушных судов по сигналам «запроса» и «ответа», увеличение точности и однозначности получаемой координатной информации за счет создания распределенной многопозиционной системы на базе сети сотовой связи GSM.
Известен трехпозиционный измеритель координат источников радиоизлучений (патент РФ №50005 U1, G01S 5/02), содержащий источник радиоизлучений, три радиоретранслятора и пункт обработки информации. Для повышения точности измерения координат источника радиоизлучений в каждый рентранслятор введен канал для приема сигналов времени единого времени системы ГЛОНАСС и сравнения запаздывания принятых сигналов с сигналами единого времени. Недостатком измерителя является отсутствие информации о высоте и номере источника излучения, что при ненаправленном характере радиоизлучений нескольких источников и радиоретрансляторов приводит к невозможности отождествления и перепутыванию принимаемых сигналов.
Известна прецизионная система посадки для наведения самолета вдоль заданной посадочной траектории в пределах радиуса действия наземного запросчика (патент РФ №2100820 C1, G01S 1/16, G01S 1/18, G01S 3/02), содержащая радиоответчик, не менее четырех наземных отдельно расположенных приемоиндикаторов, причем каждый содержит устройство для приема сигнала от радиответчика, таймер, компьютер, выходное устройство для передачи сигнала на самолет. Недостатком системы является незначительная дальность действия, поскольку работа приемоиндикатора основана на приеме сигнала запросчика, а также наличие мешающих сигналов ответа от соседних воздушных судов (находящихся в районе летного поля), появление которых обусловлено ненаправленным характером излучения антенн ответчиков.
Наиболее близким к предлагаемому изобретению (прототипом) является многопозиционная система посадки воздушных судов (патент РФ №2489325 B64D 45/04, G01S 1/16), содержащая наземный запросчик, соединенный через радиолинию с бортовой аппаратурой управления воздушным судном, и не менее трех наземных приемников ответных сигналов, соединенных с наземной ЭВМ управления через оптоволоконную и/или радиолинию WiMax. ЭВМ управления через радиолинию управления посадкой соединена с бортовой аппаратурой управления воздушным судном. Бортовая аппаратура управления соединена с бортовым измерителем высоты и с радиолинией «запрос» и «ответ». ЭВМ управления снабжена модулем расчета координат воздушного судна и отклонения его от траектории посадки на основе измерения высоты полета воздушного судна и разности дальностей до воздушного судна от относительно местоположения запросчика и приемников ответных сигналов.
Недостатком прототипа является:
низкая достоверность отождествления нескольких воздушных судов, находящихся в районе посадки вследствие слабой направленности антенн ответчика и приемников ответных сигналов, а также отсутствия в приемниках режима идентификации воздушных судов по их бортовым номерам и, как следствие, возможность перепутывания сигналов «ответа», поступающих от различных судов;
незначительная точность определения местоположения воздушных судов при расположении приемников ответных сигналов в районе аэропорта, поскольку при малых значениях баз (расстояний между приемниками) точность определения гиперболической линии положения невелика [Сайбель А.Г. Основы теории точности радиотехнических методов местоопределения. - М.: Из-во Оборонпром, 1958, стр 20-21.];
незначительная величина базы, ограниченная дальностью передачи информации по широкополосной волоконной и/или радиолинии WiMax.
Целью изобретения является повышение дальности действия, достоверности отождествления и точности определения линии положения воздушных судов.
Указанная цель достигается тем, что многопозиционная система определения местоположения воздушных судов, содержащая наземный радиозапросчик и самолетный ответчик, соединенные линией запроса, не менее трех приемников ответных сигналов, соединенных с самолетным ответчиком по линиям ответа, ЭВМ с модулем расчета координат воздушного судна, выполненным с учетом измерения высоты полета и разности дальностей до воздушного судна относительно местоположения запросчика, дополнительно содержит последовательно соединенные модем сотовой связи GSM и индикатор отображения воздушной обстановки, не менее трех комплектов последовательно соединенных приемника спутниковой навигационной системы ГЛОНАСС, кодирующего устройства и модема сотовой связи GSM, причем ко вторым входам кодирующих устройств подключены выходы приемников ответных сигналов, при этом совокупность последовательно включенных приемника спутниковой навигационной системы ГЛОНАСС, кодирующего устройства, модема сотовой связи GSM, и подключенного ко второму входу кодирующего устройства приемника ответных сигналов, представляет собой приемный модуль (ПМ), не менее трех базовых станций сети сотовой связи GSM, на которых размещаются приемные модули, многоканальный модем сотовой связи GSM, подключенный ко входу ЭВМ, причем выходы модемов сети связи GSM приемных модулей, а также вход модема сотовой связи GSM индикатора соединены линиями сотовой связи с одноименными входами и выходом многоканального модема сети связи GSM, подключенного ко входу ЭВМ, посредством протоколов цифровой связи стандарта GSM, причем самолетный ответчик является типовым и содержит шифратор, на который поступает информация бортового номера, барометрической высоты, топливомера т.д. [Довлатов П.С. Сосновский А.А., Хаймович И.А. Авиационная радиолокация. - М.: Транспорт, 1984], при этом предпочтительно, что индикатор воздушной обстановки и ЭВМ располагаются в центре управления воздушным движением.
Приведенная совокупность признаков отсутствует в исследованной патентной и научно-технической литературе по данному вопросу, следовательно, предложенные технические решения соответствуют критерию «новизна».
Сущность изобретения поясняется фиг. 1-3.
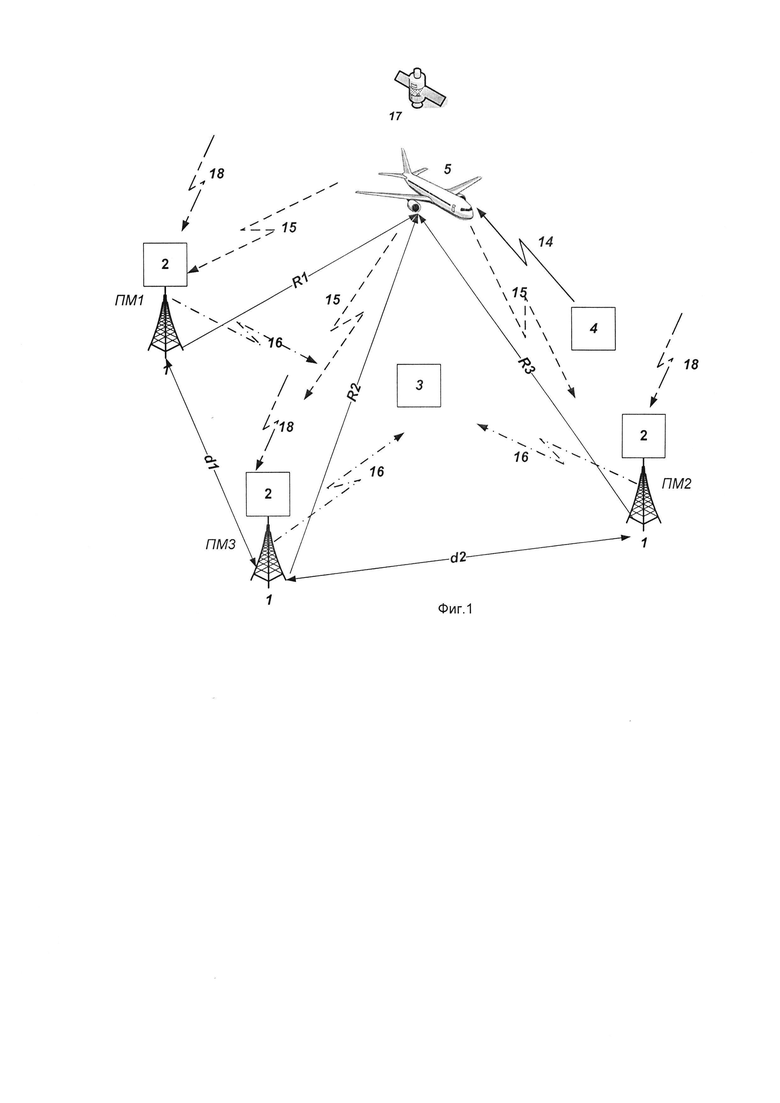
Фиг. 1 - пространственное расположение элементов многопозиционной системы определения местоположения воздушных судов;
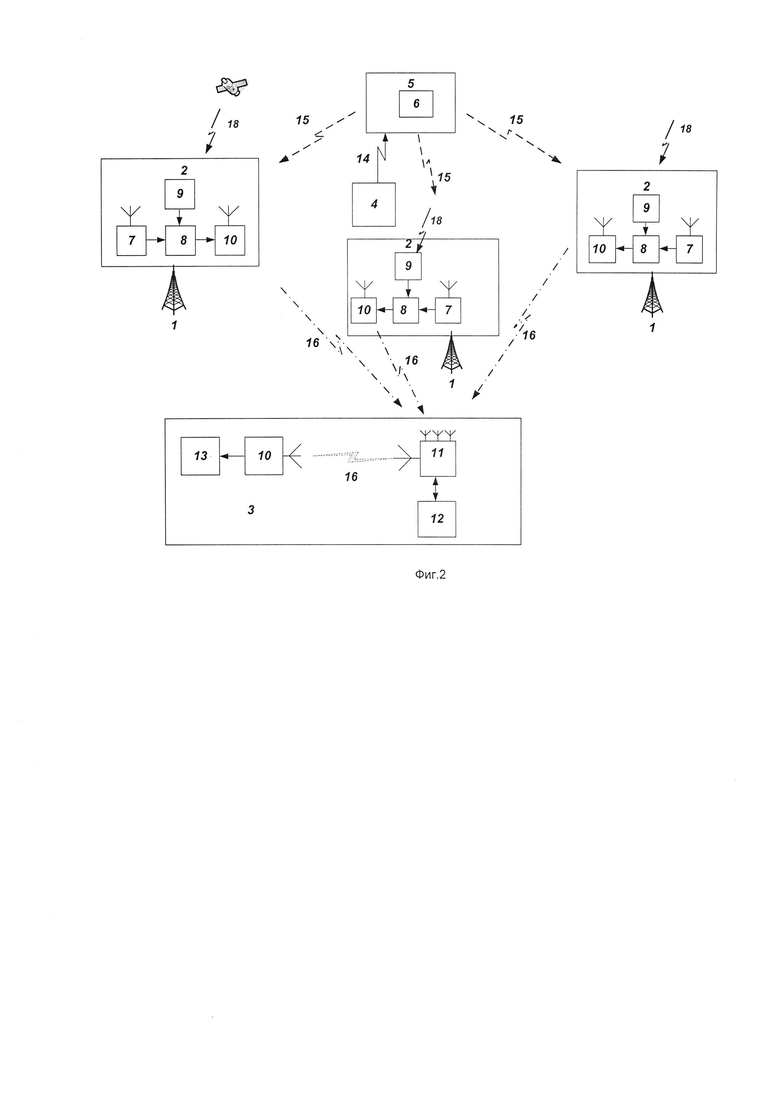
Фиг. 2 - функциональная схема многопозиционной системы определения местоположения воздушных судов.
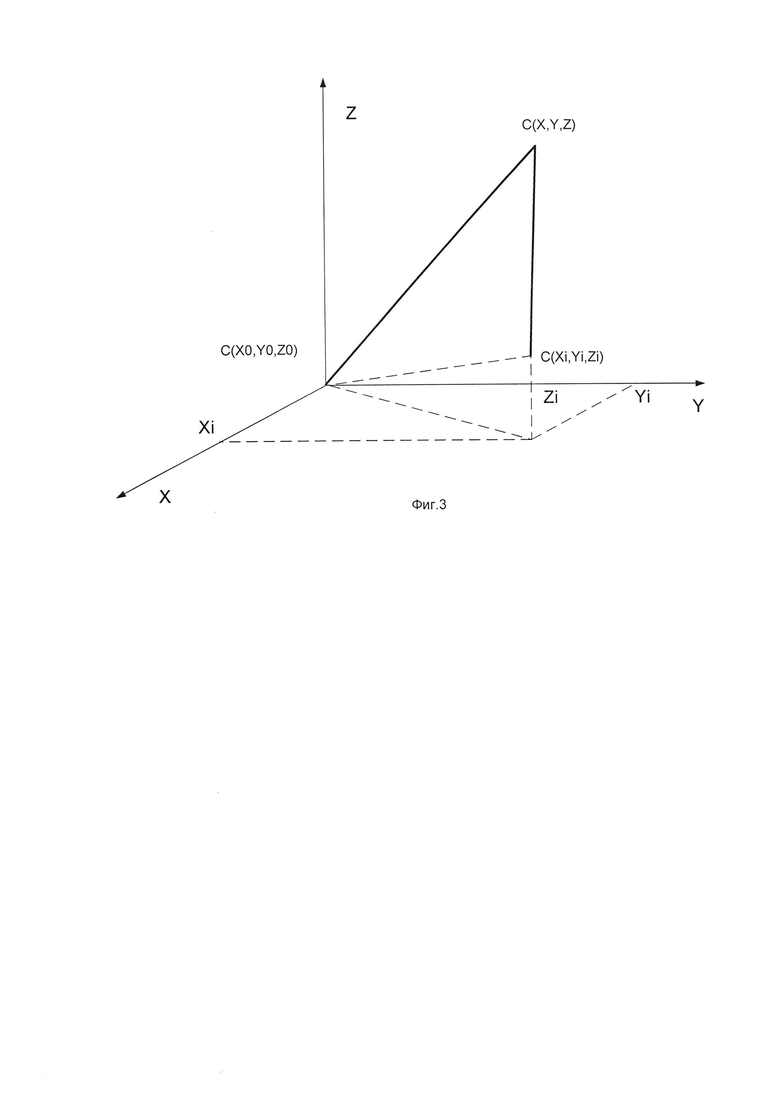
Фиг. 3 - гиперболическая система координат, используемая при оценке местоположения воздушного судна.
Аппаратура многопозиционной системы определения местоположения воздушных судов состоит из расположенных на не менее чем трех базовых станциях (БС) сотовой связи 1 приемных модулей 2, центра управления воздушным движением 3, наземного запросчика 4, расположенного на воздушном судне 5 самолетного ответчика 6, причем каждый приемный модуль состоит из последовательно соединенных приемника ответных сигналов 7 кодирующего устройства 8 и модема 10 сотовой связи GSM, причем ко второму входу кодирующего устройства 8 подключен навигационный приемник 9 спутниковой навигационной системы ГЛОНАСС 17, центр управления воздушным движением 3 состоит из последовательно соединенных многоканального модема 11 сети связи GSM и ЭВМ 12, а также последовательно соединенных модема 10 сотовой связи GSM и индикатора отображения воздушной обстановки 13, причем наземный запросчик 4 и самолетный ответчик 6 соединены линий запроса 14, самолетный ответчик 6 и приемники ответных сигналов 7 приемных модулей 2 соединены линией ответа 15, модемы 10 сотовой связи GSM и многоканальный модем 11 сотовой связи GSM соединены линией сотовой связи 16 GSM на уровне протоколов поколения от 2.5 G, навигационные приемники 9 соединены со спутниковой навигационной системой ГЛОНАСС 17 посредством линий передачи навигационных сигналов 18.
Заявляемая многопозиционная система определения местоположения воздушных судов работает следующим образом. Наземный запросчик 4 (фиг. 1, 2) посылает запросный сигнал 14 в направлении на воздушное судно 5. После приема запросного сигнала самолетный ответчик 6 ненаправленно и безадресно излучает кодированный ответный сигнал по линии ответа 15, содержащий в общем виде информацию о бортовом номере, высоте, запасе топлива, номере рейса и т.д. [Довлатов П.С., Сосновский А.А., Хаймович И.А. Авиационная радиолокация. - М.: Транспорт, 1984]. Излученные кодированные ответные сигналы принимаются приемниками 7, а после преобразования и дешифрирования поступают на первые входы кодирующих устройств 8. Навигационный приемник 9 принимает сигналы спутниковой навигационной системы ГЛОНАСС 17 и извлекает информацию о текущем времени. В кодирующих устройствах 8 осуществляется формирование кодированного сообщения о текущем времени (из информации, поступающей с выхода навигационного приемника 9) и о номере и высоте воздушного судна (из информации, поступающей с приемника ответных сигналов 7). Данное сообщение поступает на вход модема 10 сети связи GSM (фиг. 2). С выхода модема 10 сигналы по линии сотовой связи 16 GSM поступают на один из входов многоканального модема 11 сотовой связи GSM. С выхода многоканального модема 11 сигналы поступают на вход ЭВМ 12. В ЭВМ осуществляется измерение координат воздушного судна 5 на основании уравнений разностно-дальномерного метода (Черняк В.С Многопозиционная радиолокация. - М.: Радио и Связь, 1993. - 416 с.). По линии сотовой связи GSM 16 с выхода многоканального модема 11 рассчитанные ЭВМ 12 координаты воздушного судна 5 передаются на вход модема 10, соединенного с индикатором отображения воздушной обстановки 13, где отображаются на экране монитора.
Рассмотрим произвольную трехкоординатную гиперболическую схему (фиг. 3). [Справочник по радиолокации. Под ред. М. Сколника. Том 4. Радиолокационные станции и системы. Пер. с англ. - М.: Советское радио, 1978. - 376 с.].
Здесь (фиг. 3):
(x0, y0, z0) - положение центра управления воздушным движением 3,
(xi, yi, zi) - положение i-го приемного модуля 2,
(x, y, z) - координаты воздушного судна 5.
Для определенности будем полагать, что начало координат лежит в точке (x0, y0, z0), (то есть x0=0, y0=0, z0=0), а все прочие позиции приемных модулей расположены в плоскости ΧΟΥ (zi=0,  ).
).
Вводя обозначения:

где
ri - расстояние от цели до i-приемной позиции,
ρ=r0,


имеем следующие оценки Декартовых координат цели, выполненные по наблюдениям разностей Δ1, Δ2, Δ3:
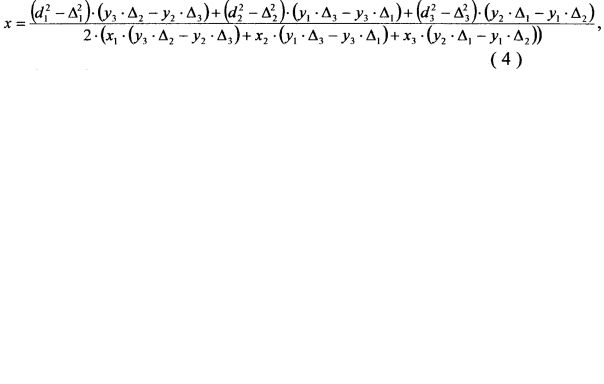



Из физических соображений понятно, что для наземной локации следует иметь в виду возможность отрицательных Z, выбирать или отбрасывать которые необходимо из дополнительных соображений. Точность измерения разности расстояний определяется точностью измерения времен прихода сигналов с приемных позиций 2 на многоканальный модем GSM 11. Последняя, в свою очередь, определяется точностью синхронизации приемных модулей по сигналам СНС ГЛОНАСС. Уменьшение флуктуационных ошибок осуществляется применением Калмановской фильтрации [Балакришнан А.В. Теория фильтрации Калмана. - М.: Мир, 1988]. Отождествление воздушных судов осуществляется по кодированному ответному сигналу по линии ответа 15, содержащему в общем виде информацию о бортовом номере, высоте, запасе топлива. Точность определения координат разностно-дальномерным методом будет прямо пропорциональна величине базы между базовыми станциями. Поэтому при больших базах между БС ошибка будет незначительной.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| КОМПЛЕКС ИЗМЕРЕНИЯ МОЩНОСТИ ИЗЛУЧЕНИЯ БАЗОВЫХ СТАНЦИЙ СОТОВОЙ СВЯЗИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2015 |
|
RU2606344C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2558412C1 |
| СИСТЕМА КОНТРОЛЯ ЖИЗНЕННО ВАЖНЫХ ПОКАЗАТЕЛЕЙ ЗДОРОВЬЯ ПАЦИЕНТА | 2010 |
|
RU2454924C2 |
| Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки | 2018 |
|
RU2692702C1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |
| ШАХТНАЯ СИСТЕМА МОНИТОРИНГА, ОПОВЕЩЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ГОРНОРАБОЧИХ | 2009 |
|
RU2401947C2 |
| Способ отождествления позиционных измерений и определения местоположения воздушных объектов в многопозиционной радионавигационной системе с использованием многолучевых радиопередатчиков | 2018 |
|
RU2703987C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
Многопозиционная система определения местоположения воздушных судов предназначена для обнаружения и измерения координат местоположения воздушных судов гиперболическим методом по сигналам ответчика воздушного судна. Достигаемый технический результат - повышение дальности действия и достоверности отождествления. Указанный результат достигается за счет того, что в ответ на пространственно-ориентированный запрос ответчик воздушного судна излучает ненаправленный ответный сигнал, содержащий информацию бортового номера, высоты, об остатке топлива. Ответный сигнал принимается не менее тремя удаленными друг от друга приемными модулями, расположенными на базовых станциях сотовой связи. В каждом приемном модуле сигнал расшифровывается и снова кодируется с использованием информации о текущем времени от приемника GPS, о номере и высоте воздушного судна, и по сети GSM отправляется на ЭВМ обработки. Для получения координатной информации о точке положения воздушного судна необходимо, чтобы информация в ЭВМ поступала не менее чем от трех приемных модулей. 1 з.п. ф-лы, 3 ил.
1. Многопозиционная система определения местоположения воздушных судов, содержащая наземный радиозапросчик и самолетный ответчик, соединенные линией запроса, не менее трех приемников ответных сигналов, соединенные с самолетным ответчиком по линиям ответа, ЭВМ с модулем расчета координат воздушного судна, выполненным с учетом измерения высоты полета и разности дальностей до воздушного судна относительно местоположения запросчика, отличающаяся тем, что дополнительно содержит последовательно соединенные модем сотовой связи GSM и индикатор отображения воздушной обстановки, не менее трех комплектов последовательно соединенных приемника спутниковой навигационной системы ГЛОНАСС, кодирующего устройства и модема сотовой связи GSM, причем ко вторым входам кодирующих устройств подключены выходы приемников ответных сигналов, при этом совокупность последовательно соединенных приемника спутниковой навигационной системы ГЛОНАСС, кодирующего устройства, модема сотовой связи GSM и подключенного ко второму входу кодирующего устройства приемника ответных сигналов представляет собой приемный модуль, не менее трех базовых станций сети сотовой связи GSM, на которых размещаются приемные модули, многоканальный модем сотовой связи GSM, подключенный ко входу ЭВМ, причем выходы модемов сотовой связи GSM приемных модулей, а также вход модема сотовой связи GSM индикатора отображения воздушной обстановки соединены линиями сотовой связи соответственно с входами и выходом многоканального модема сети связи GSM, подключенного ко входу ЭВМ, причем самолетный ответчик является типовым и содержит шифратор, на который поступает информация о бортовом номере, барометрической высоте, запасе топлива, номере рейса.
2. Многопозиционная система определения местоположения воздушных судов по п. 1, отличающаяся тем, что последовательно соединенные многоканальный модем сети связи GSM и ЭВМ с модулем расчета координат воздушного судна, а также последовательно соединенные модем сотовой связи GSM и индикатор отображения воздушной обстановки расположены в центре управления воздушным движением.
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| Способ нанесения лакокрасочных покрытий и краскораспылитель, и устройство для осуществления этого способа | 1957 |
|
SU113242A1 |
| WO 2003005058 A3, 16.01.2003 | |||
| WO 1994010582 A1, 11.05.1994 | |||
| JP 8201510 A, 09.08.1996 | |||
| US 5017930 A1, 21.05.1991. | |||

