Изобретение относится к радиотехнике, а именно к способам определения местоположения источника радиоизлучения (ИРИ), и предназначено для использования в навигационных, пеленгационных, локационных средствах для определения местоположения ИРИ.
Известен способ определения координат источника радиоизлучения с борта летательного аппарата с использованием триортогональной рамочной антенной системы по патенту RUS №2709607 [1], согласно которому выполняют следующую последовательность действий:
принимают триортогональной рамочной антенной системой (ТОРАС) радиосигналы от ИРИ;
измеряют координаты центров и углы ориентации ТОРАС в различные моменты времени в процессе полета летательного аппарата;
определяют положения в пространстве векторов напряженности магнитного поля в различные моменты времени;
формируют вспомогательные плоскости положения ИРИ;
определяют линии положения ИРИ как линии пересечения каждой из вспомогательных плоскостей положения ИРИ с поверхностью Земли;
вычисляют координаты ИРИ в точке пересечения линий положения ИРИ.
Недостатком аналога является относительно низкая точность определения координат ИРИ в условиях многолучевого распространения радиоволн, обусловленная невозможностью исключения измерений, полученных по отраженной от различных препятствий волне.
Известен способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов по патенту RUS №2605457 [2], согласно которому выполняют следующую последовательность действий:
определяют расстояние  между первым спутником-ретранслятором (CP) CP1 и пользовательским терминалом (ПТ);
между первым спутником-ретранслятором (CP) CP1 и пользовательским терминалом (ПТ);
определяют расстояние  между вторым СР2 и ПТ;
между вторым СР2 и ПТ;
измеряют модуль  азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
вычисляют в УМС доплеровские сдвиги частот  первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат CP1, СР2 и определенных параметров
первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат CP1, СР2 и определенных параметров 
определяют, по меньшей мере, один из параметров: радиальную скорость  перемещения первого CP1 относительно ПТ, и/или радиальную скорость
перемещения первого CP1 относительно ПТ, и/или радиальную скорость  перемещения второго СР2 относительно ПТ, с учетом доплеров-ских сдвигов частот
перемещения второго СР2 относительно ПТ, с учетом доплеров-ских сдвигов частот 
вычисляют широту ϕПТ и долготу λПТ ПТ.
Недостатком аналога является относительно низкая точностью определения координат ИРИ в условиях многолучевого распространения радиоволн, связанная с низкой точностью первичных измерений при наличии переотражений радиоволн от различных предметов.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по своей технической сущности является разностно-дальномерный способ определения местоположения источника радиоизлучения в условиях многолучевого распространения радиоволн (МРРВ) RUS №2714303 [3] заключающимся в том, что:
на каждом из приемных пунктов (ПП) с известными координатами принимают сигнал ИРИ и по нему измеряют время прихода сигнала,
для всех возможных пар ПП вычисляют разности времен прихода сигналов от ИРИ до ПП этой пары и по ним вычисляют соответствующие разности дальностей,
формируют набор промежуточных оценок координат (ПОК) ИРИ путем определения разностно-дальномерным способом промежуточной оценки координат для каждой возможной комбинации из трех ПП,
из сформированных оценок составляют группы, каждая из которых содержит, по меньшей мере, четыре ПОК ИРИ,
для каждой сформированной группы вычисляют внутригрупповую дисперсию ПОК ИРИ,
выявляют ПП, находящиеся в условиях МРРВ по признаку превышения внутригрупповыми дисперсиями ПОК ИРИ предварительно заданного порога,
в наборе ПОК ИРИ оставляют только те ПОК ИРИ, которые получены без использования выявленных ПП, находящихся в условиях МРРВ,
для получения итоговой оценки координат ИРИ вычисляют среднее арифметическое оставшихся в наборе ПОК.
Недостатком способа прототипа [3] является относительно-невысокая точность определения координат ИРИ, обусловленная отсутствием учета высоты ИРИ, а также высот ПП при измерениях и расчетах.
Техническим результатом изобретения является повышение точности определения координат ИРИ в 3-мерном пространстве в условиях МРРВ.
Указанный технический результат достигается тем, что в известном разностно-дальномерном способе определения местоположения ИРИ в условиях МРРВ, заключающимся в том, что на каждом из ПП с известными координатами принимают радиосигнал ИРИ и относительно времени прихода радиосигнала от ИРИ, для всех возможных пар ПП измеряют разности времен прихода радиосигнала от ИРИ до ПП этой пары и по ним вычисляют соответствующие разности дальностей, формируют набор ПОК ИРИ путем определения разностно-дальномерным способом ПОК для различных комбинаций ПП, из этих оценок составляют группы, каждая из которых содержит, по меньшей мере, четыре ПОК ИРИ, для каждой сформированной группы вычисляют внутригрупповую дисперсию ПОК ИРИ, выявление ПП, находящихся в условиях МРРВ, осуществляют по признаку превышения внутригрупповыми дисперсиями ПОК ИРИ предварительно заданного порога, после чего в наборе ПОК ИРИ оставляют только те ПОК ИРИ, которые получены без использования выявленных ПП, находящихся в условиях МРРВ, для получения итоговой оценки координат ИРИ вычисляют среднее арифметическое оставшихся в наборе ПОК, ПП размещают в 3-мерном пространстве. Набор ПОК ИРИ формируют путем определения разностно-дальномерным способом ПОК в 3-мерном пространстве для каждой возможной комбинации из четырех ПП, не находящихся в одной плоскости. После формирования набора ПОК ИРИ из этих оценок составляют группы, каждая из которых содержит, по меньшей мере, четыре ПОК ИРИ. Для каждой сформированной группы вычисляют внутригрупповую дисперсию ПОК ИРИ. Выявление ПП, находящихся в условиях МРРВ, осуществляют по признаку превышения внутригрупповыми дисперсиями ПОК ИРИ предварительно заданного порога. В наборе ПОК ИРИ оставляют только те ПОК ИРИ, которые получены без использования выявленных ПП, находящихся в условиях МРРВ. Для получения итоговой оценки координат ИРИ вычисляют среднее арифметическое оставшихся в наборе ПОК.
ПП размещают в 3-мерном пространстве так, чтобы объем многогранника, образованного вершинами с точками, совпадающими с ПП был максимальным.
Измерения и расчеты выполняют в декартовой системе координат OXYZ.
Благодаря указанной новой совокупности существенных признаков, в том числе за счет размещения ПП в 3-мерном пространстве и формирования набора ПОК ИРИ путем определения разностно-дальномерным способом ПОК в 3-мерном пространстве для каждой возможной комбинации из четырех ПП, достигается технический результат изобретения: повышение точности определения координат ИРИ в 3-мерном пространстве в условиях МРРВ. Заявленный способ поясняется чертежами, где:
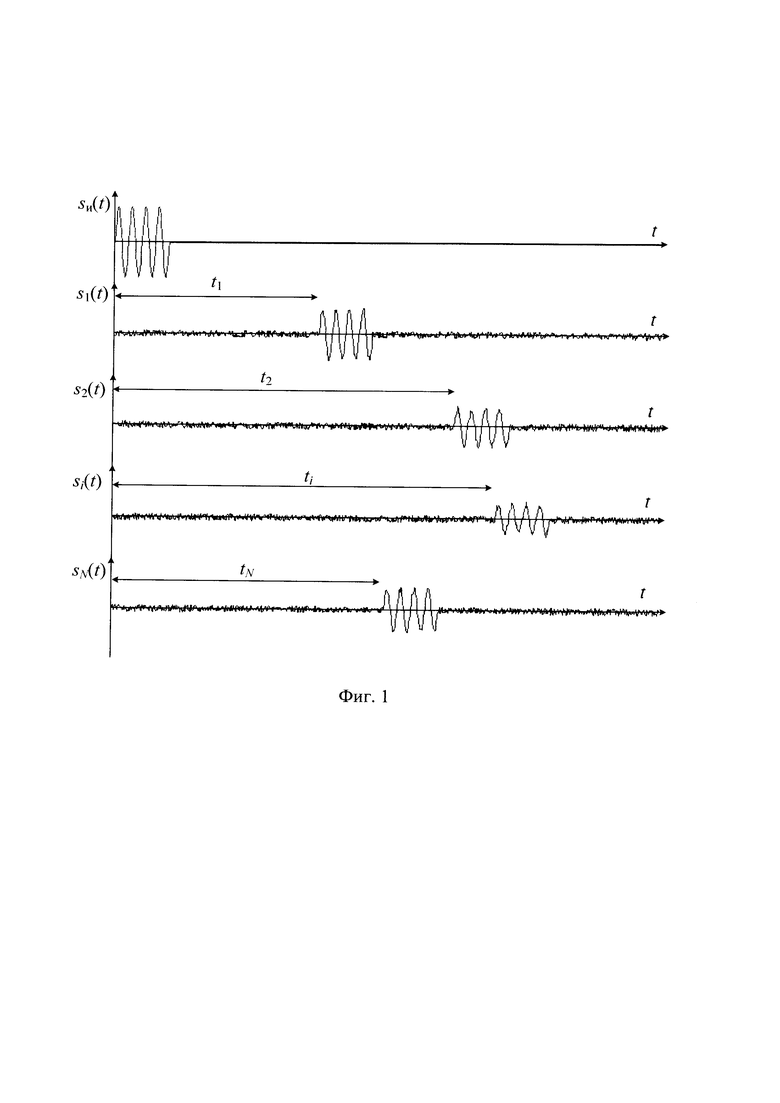
на фиг. 1 показаны сигнал ИРИ sи(t) и сигналы si(t), i=1, 2, …, N, принятые в i-х ПП;
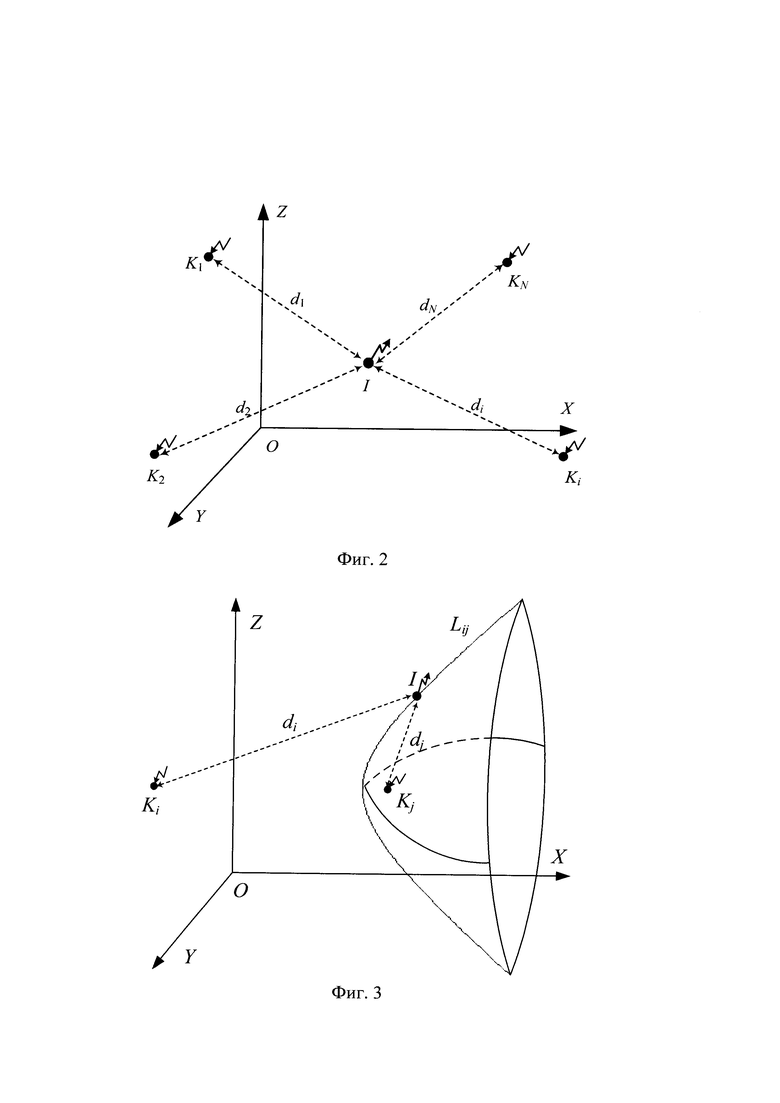
на фиг. 2 показаны ИРИ, территориально распределенные ПП и расстояния di между ИРИ и i-ми ПП в выбранной ДСК OXYZ;
на фиг. 3 показаны ИРИ, два территориально распределенных ПП, геометрическое место точек на плоскости в виде части двуполостного гиперболоида вращения Lij, образованного разностью расстояний di и dj в выбранной ДСК OXYZ;
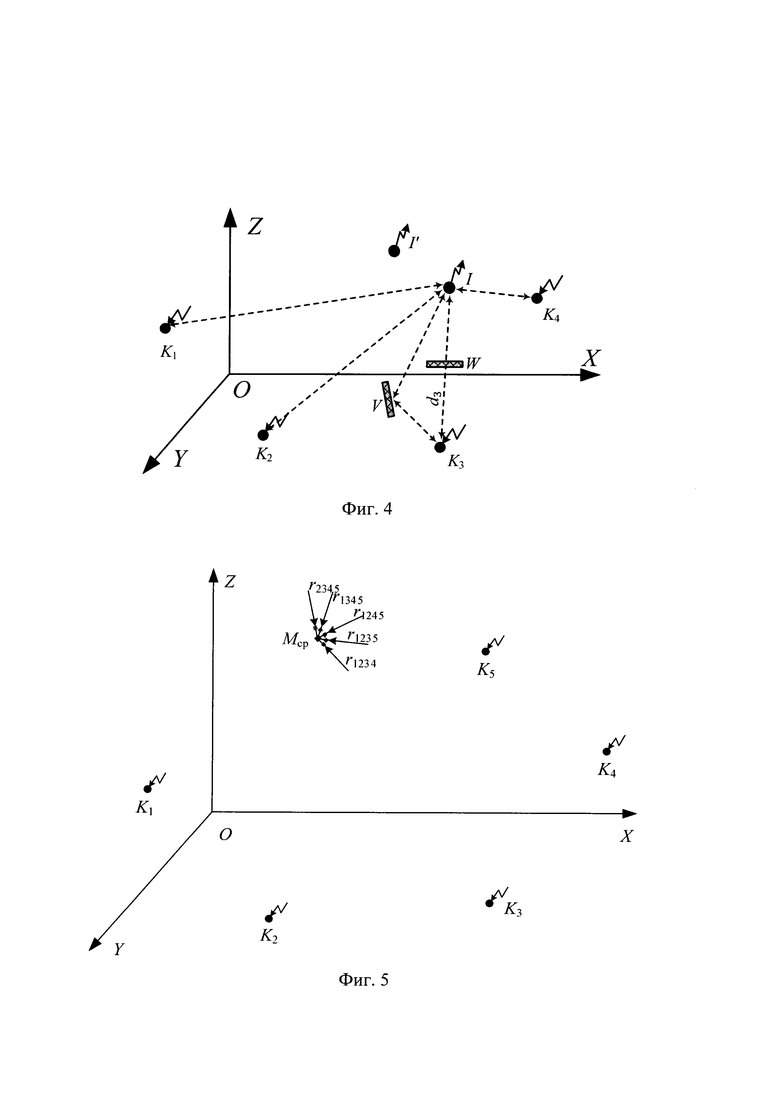
на фиг. 4 показано геометрическое влияние эффекта отсутствия прямой видимости на ошибку определения местоположения разностно-дальномерным способом в выбранной ДСК OXYZ;
на фиг. 5 показан пример промежуточных оценок координат определения местоположения ИРИ разностно-дальномерным способом при использовании пяти ПП в условиях прямой видимости (LOS, Line Of Sight);
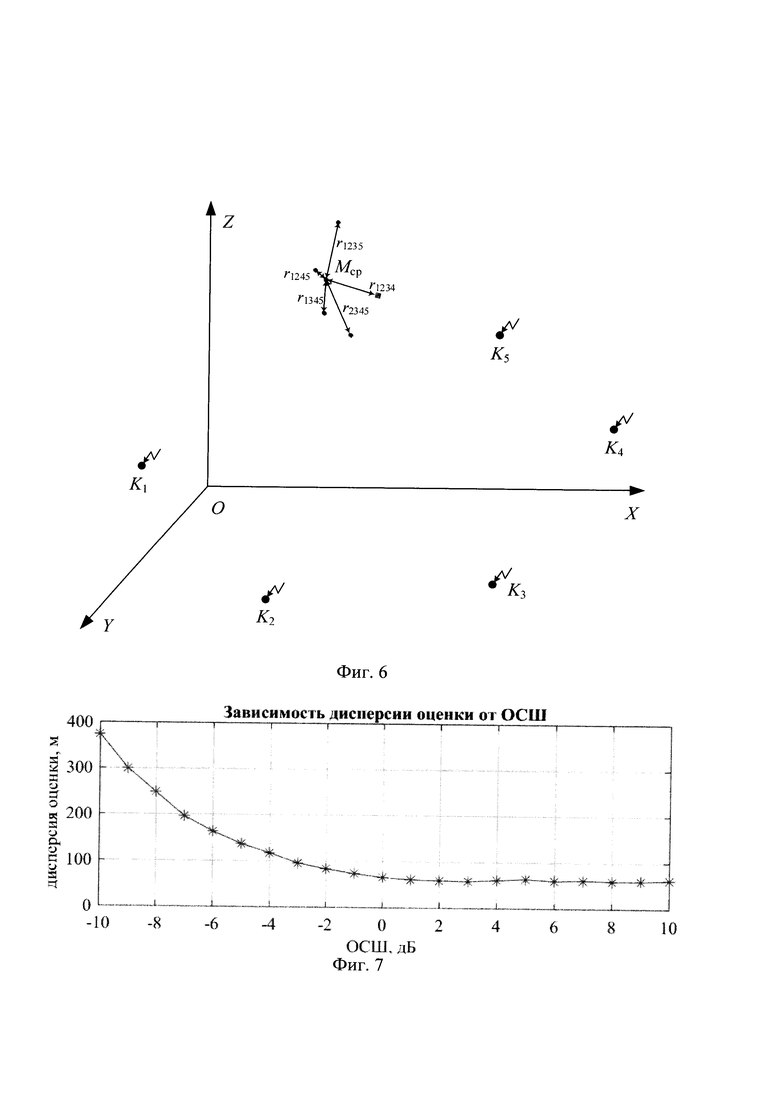
на фиг. 6 показан пример промежуточных оценок координат определения местоположения ИРИ разностно-дальномерным способом при использовании пяти ПП в условиях отсутствия прямой видимости (NLOS, Non Line Of Sight);
на фиг. 7 показан пример эмпирической зависимости дисперсии оценки координат от отношения сигнал/шум (ОСШ);
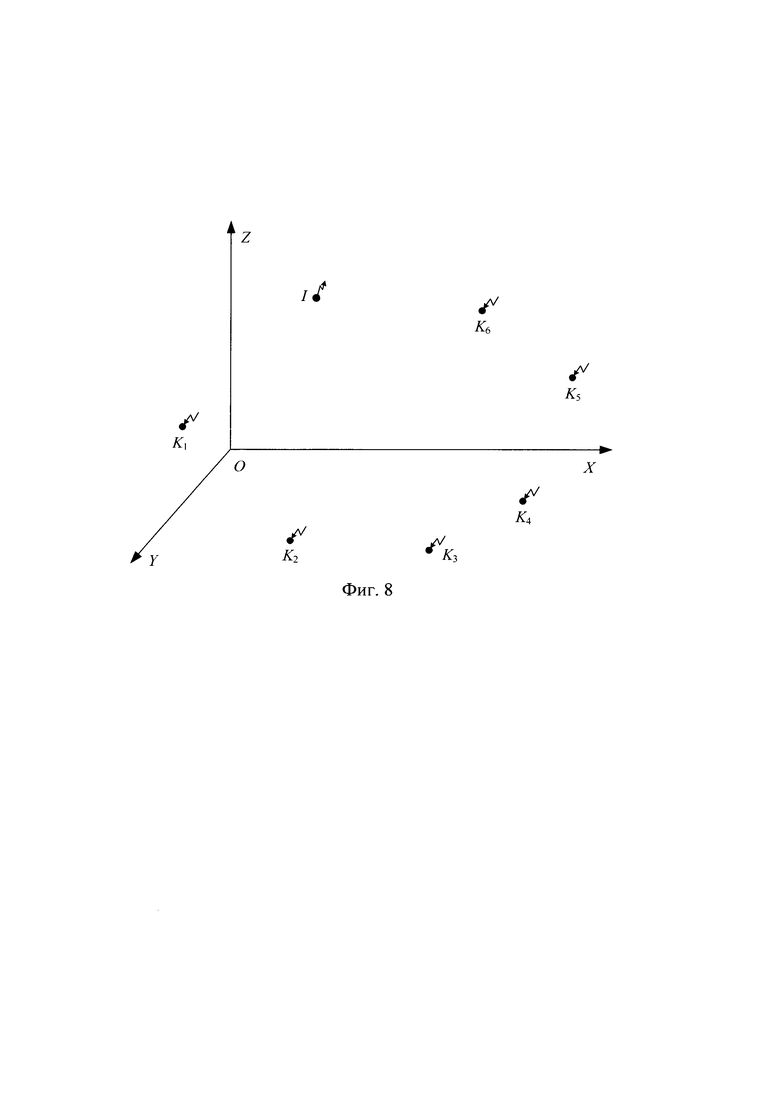
на фиг. 8 показан пример ИРИ и шести территориально распределенных ПП в выбранной ДСК OXYZ;
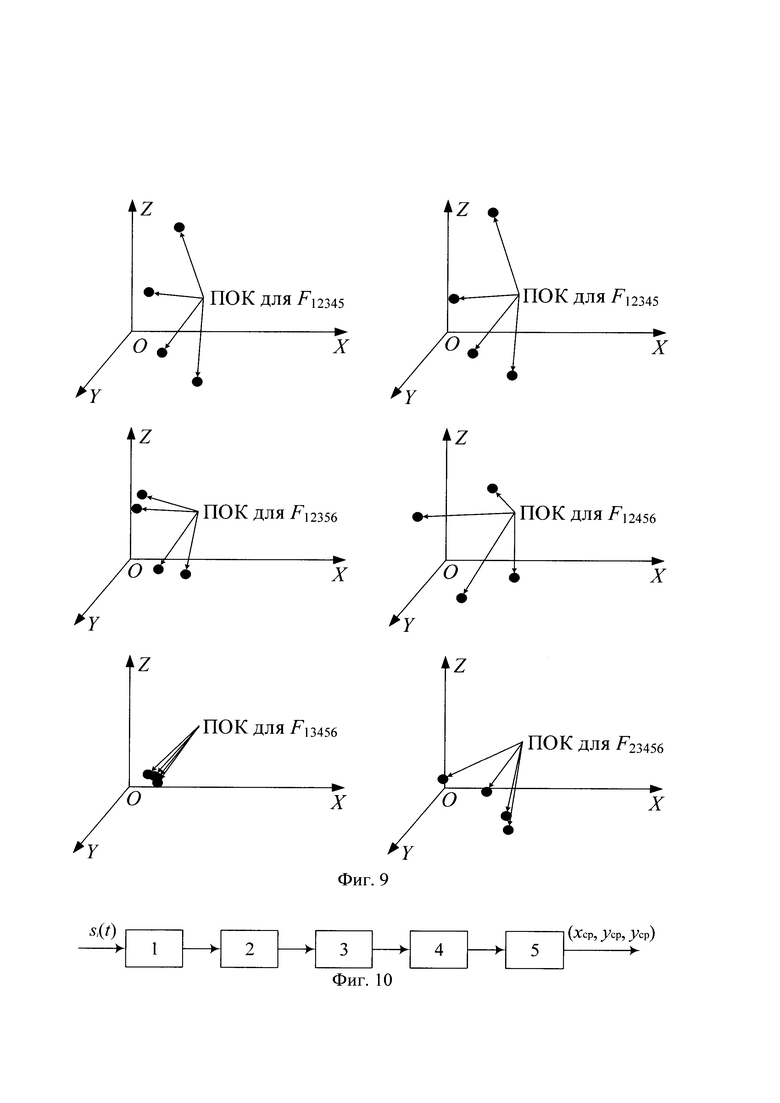
на фиг. 9 показан пример разброса ПОК ИРИ для различных групп ПП в выбранной ДСК OXYZ;
на фиг. 10 показан пример функциональной схемы для реализации предлагаемого способа;
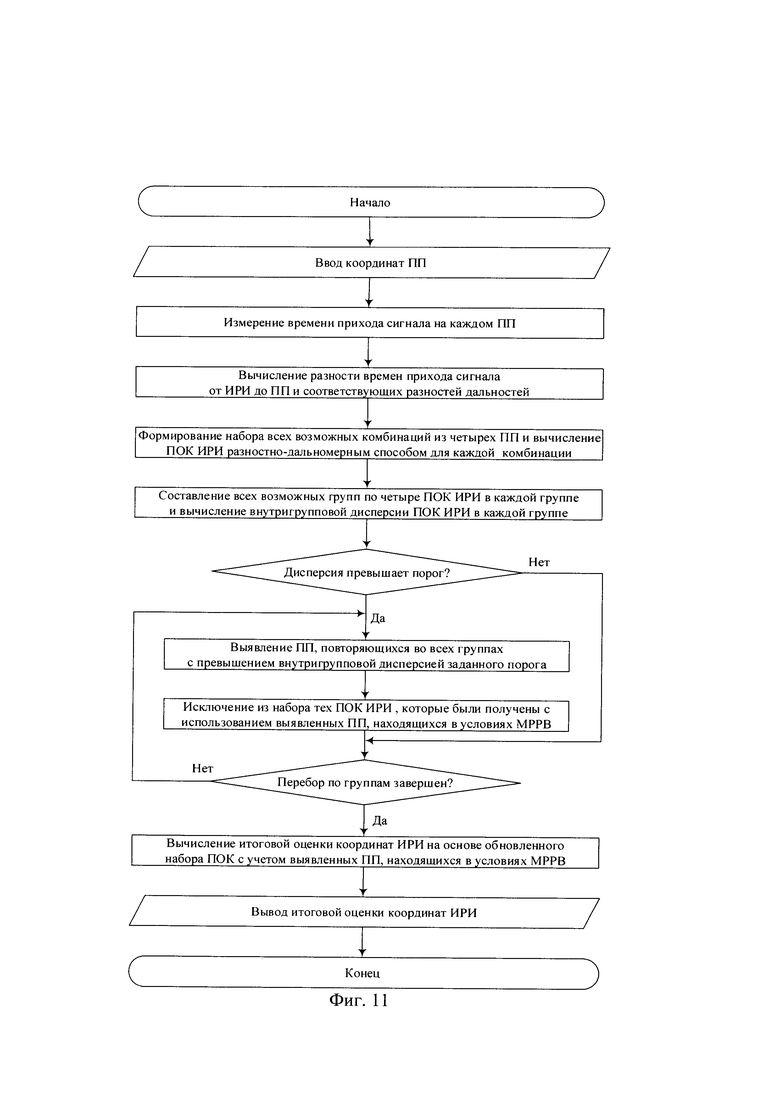
на фиг. 11 показана блок-схема алгоритма реализации предлагаемого способа.
Согласно фиг. 10 в функциональную схему для реализации предлагаемого способа входят следующие последовательно соединенные блоки:
- блок измерения времени прихода сигнала на каждом пункте приема и определения собственных координат ПП посредством модулей Глобальных навигационных спутниковых систем (ГНСС);
- блок вычисления разности времен прихода сигнала от ИРИ до ПП этой пары и вычисления соответствующих разностей дальностей;
- блок формирования набора всевозможных комбинаций из четырех пунктов приема и вычисления набора промежуточных оценок координат (ПОК) ИРИ разностно-дальномерным способом для каждой из сформированных комбинаций;
- блок групповой обработки ПОК, оценки внутригрупповой дисперсии ПОК и выявления ПП, находящихся в условиях МРРВ;
- блок вычисления итоговой оценки координат ИРИ на основе среднего арифметического из набора промежуточных оценок координат ИРИ с учетом выявленных ПП, находящихся в условиях МРРВ.
Реализация предлагаемого способа в устройстве, приведенном на фиг. 10 с учетом блок-схемы алгоритма, приведенной на фиг. 11, а также фиг. 1-9 осуществляется следующим образом.
Определение местоположения разностно-дальномерным способом производят на основе обработки измеренных разностей времен прихода сигналов (см. фиг. 1), принятых от источника радиоизлучения I синхронизированными территориально распределенными N приемными пунктами K1, K2, …, Ki, …, KN (см. фиг. 2).
Сигнал, принятый i-м приемным пунктом, можно представить выражением si(t)=αisи(t-ti)+ni(t), i=1, 2, …, N, где принятый сигнал αis(t-ti) является задержанной на ti=di/c копией переданного ИРИ сигнала sи(t), ослабленного в αi раз при распространении на расстояние di между ИРИ и i-м приемны пунктом; ni{t) - шум в точке расположения i-го приемного пункта; с - скорость света.
Исходными данными для предлагаемого разностно-дальномерного способа являются известные координаты ПП, получаемые посредством модулей ГНСС, а также измеренные на каждом ПП времена прихода сигнала от ИРИ. Зная времена прихода, можно вычислить разности времен прихода сигналов Δtij=ti-tj, i,j=1, 2, …, N, i≠j, по которым вычисляются разности дальностей Δdij=di-dj=с⋅Δtij, где di - расстояние между ИРИ и i-м ПП (см. фиг. 2); dj - расстояние между ИРИ и j-м ПП.
Пусть (хi, уi, zi) - координаты i-го ПП Ki, (xj,yj,zj) - координаты j-го ПП Kj, (x0, y0, z0) - неизвестные координаты ИРИ, тогда di и dj определяются по известным формулам [4] 
Разность дальностей Δdij=di-dj позволяет построить часть двуполостного гиперболоида вращения Lij в выбранной ДСК OXYZ - геометрическое место точек плоскости, для которых абсолютное значение разности расстояний от ИРИ I до пары точек Ki и Kj постоянно (см. фиг. 3).
При определении местоположения ИРИ в 3-мерном пространстве необходимо найти пересечение как минимум трех двуполостных гиперболоидов вращения, например, L12, L13 и L14, для чего требуются минимум четыре ПП K1, K2, K3, K4.
Рассмотрим качественный пример влияния эффекта отсутствия прямой видимости NLOS (Non-Line-Of-Sight) в условиях многолучевого распространения радиоволн на одном из ПП на точность определения местоположения разностно-дальномерным способом (см. фиг. 4).
При наличии прямой видимости LOS (Line-Of-Sight) каждое измерение разности дальностей Δdij определяет двуполостный гиперболоид вращения, а пересечение не менее трех двуполостных гиперболоидов вращения определяет местоположение ИРИ. На фиг. 4 представлена ситуация, когда в определении местоположения участвуют 4 ПП: 3 приемных пункта K1, K2, K4 имеют измерения по прямой видимости LOS; один приемный пункт K3 закрыт препятствием W от ИРИ и имеет измерения NLOS, полученные в результате переотражения от отражателя V, что приводит к увеличению дальномерного измерения с d3 до  Указанная ошибка приведет к тому, что при определении координат ИРИ разностно-дальномерным способом вместо координат точки I будут определены координаты точки I'.
Указанная ошибка приведет к тому, что при определении координат ИРИ разностно-дальномерным способом вместо координат точки I будут определены координаты точки I'.
В заявляемом изобретении ПП с отсутствием прямой видимости выявляются и затем исключаются из процесса определения местоположения ИРИ.
В общем случае количество пар ПП определяется биномиальным коэффициентом из n по k, или числом сочетаний из n по k.
В каждой паре ПП можно измерить разность времен прихода сигналов Δtij,
по которой можно вычислить разность дальностей Δdij и построить соответствующий двуполостный гиперболоид вращения Lij. Если все ПП находятся в условиях прямой видимости LOS, тогда гиперболоиды вращения пересекаются в одной точке - истинном местоположении ИРИ.
На практике из-за влияния шумов возникают ошибки оценивания Δdij, и двуполостные гиперболоиды вращения Lij отклоняются от точки расположения ИРИ. Однако для большинства реальных ситуаций эти отклонения будут небольшими.
В качестве признака, по которому возможно выявлять ПП, находящийся в условиях NLOS, предлагается использовать внутригрупповую дисперсию промежуточных оценок координат ИРИ, суть которой удобно пояснить на примере. Рассмотрим группу из пяти ПП в условиях прямой видимости (LOS, Line Of Sight) (см. фиг. 5) и ту же группу в условиях отсутствия прямой видимости (NLOS, Non Line Of Sight) (см. фиг. 6).
Количественно разброс группы ПОК ИРИ можно оценить с помощью внутригрупповой дисперсии D=((r1234)2+(r1235)2+(r1245)2+(r1345)2+(r2345)2)/5, где r1234, r1235, r1245, r1345, r2345 - удаления соответственно ПОК М1234, М1235, M1245, M1345, M2345 от средних координат Мср=(xcp, ycp, zcp) группы из пяти ПП.
Если все ПП находятся в условиях прямой видимости LOS, то разброс ПОК ИРИ будет небольшим, обусловленным лишь влиянием шумов (см. фиг. 5). Если же некоторые ПП находятся в условиях отсутствия прямой видимости NLOS, то разброс ПОК ИРИ будет большим, обусловленным и влиянием шумов и отклонением двуполостных гиперболоидов вращения от ИРИ (см. фиг. 6).
Для выявления приемных пунктов, находящихся в условиях отсутствия прямой видимости (многолучевого распространения радиоволн), предлагается сравнивать внутригрупповую дисперсию D с некоторым эмпирическим порогом Dпор.
Если дисперсия D превышает порог D>Dпop, значит в группе из четырех ПП один или более приемных пунктов находятся в условиях NLOS.
Если дисперсия не превышает порог D≤Dпop, значит все ПП группы находятся в условиях LOS. Для получения эмпирического порога Dпop возможно использовать предварительно полученную эмпирическую зависимость дисперсии оценки координат от отношения сигнал/шум ОСШ (см. фиг. 7).
Имея только пять ПП, предложенным способом возможно лишь установить факт отсутствия прямой видимости на одном или нескольких ПП.
Для выявления того, какие именно ПП находятся в условиях NLOS необходимо более пяти ПП. Поясним это на примере. Пусть имеется шесть ПП (N=6) (см. фиг. 8). Из шести ПП можно составить шесть групп по пять ПП S5/6={F12345, F12346, F12356, F12456, F13456, F23456}, Fijkmg={Ki, Kj, Kk, Km, Kg}, i≠j≠k≠m≠g, где Fijkmg - группа из пяти ПП Ki., Kj, Kk, Km и Kg.
Для каждой группы можно получить четыре ПОК ИРИ и найти их внутригрупповую дисперсию. Пусть опять в условиях NLOS K2, тогда группы F12345, F12346, F12356, F12456, F23456 будут иметь большую внутригрупповую дисперсию, так как они включают K2, а группа F13456 будет иметь малую внутригрупповую дисперсию, так как она не включает K2 (см. фиг. 9).
Следовательно, для выявления ПП находящихся в условиях NLOS (многолучевого распространения радиоволн) следует определить какие приемные пункты повторяются во всех группах с превышением внутригрупповой дисперсией заданного порога. После этого следует во всех группах удалить из обработки все ПОК ИРИ, которые получены с использованием выявленных ПП. Итоговую оценку координат ИРИ можно найти, усреднив оставшиеся ПОК ИРИ, например, вычислив их среднее арифметическое.
С учетом указанных особенностей для реализации заявленного изобретения последовательно выполняют следующую последовательность действий:
- размещают множество приемных пунктов сигнала в 3-мерном пространстве; в этих ПП осуществляют прием сигнала от ИРИ и измерение времени прихода измеренного сигнала, а также определение собственных координат, например, посредством модулей ГНСС, которые также решают задачу локальной синхронизации территориально-распределенных ПП;
- из всего множества ПП составляют все возможные пары ПП; для каждой пары ПП измеряют разность времени прихода сигнала от ИРИ до ПП этой пары; по измеренной разности времени прихода сигнала от ИРИ в каждой паре вычисляют разность дальностей от ИРИ до приемных пунктов этой пары;
- из всего множества ПП формируют все возможные комбинации по четыре приемных пункта; для каждой комбинации из четырех приемных пунктов разностно-дальномерным способом находят координаты ИРИ в 3-мерном пространстве, которые принимают за промежуточную оценку координат ИРИ; таким образом формируют набор ПОК ИРИ.
- из набора ПОК составляют все возможные группы по четыре ПОК;
- для каждой группы вычисляют внутригрупповую дисперсию ПОК ИРИ;
- вычисленную внутригрупповую дисперсию ПОК ИРИ каждой группы сравнивают с заданным эмпирическим порогом; считают, что превышение внутригрупповой дисперсией заданного порога означает наличие в этой группе ПП, находящихся в условиях МРРВ;
- для каждой группы, у которой внутригрупповая дисперсия превысила порог, запоминают входящие в ее состав ПП; к выявленным ПП, находящимся в условиях МРРВ, относят те ПП, которые повторяются во всех группах с превышением внутригрупповой дисперсией заданного порога;
- из набора ПОК ИРИ исключают ПОК, которые были получены с использованием выявленных ПП, находящихся в условиях МРРВ;
- вычисляют итоговую оценку координат ИРИ в 3-мерном пространстве на основе обновленного набора ПОК ИРИ с учетом исключенных ПОК, полученных с использованием выявленных ПП, находящихся в условиях МРРВ.
Имитационное моделирование заявленного способа определения местоположения ИРИ в специальном программном обеспечении Matlab [5] показало повышение точности измерения координат источника радиоизлучений по сравнению со способом прототипом на 10…20% (в зависимости от взаимного расположения ИРИ и ПП), при решении задачи оценивания местоположения ИРИ по единственному измеренному сигналу в условиях многолучевого распространения радиоволн, что указывает на возможность достижения указанного технического результата.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Богдановский С. В., Дедовская Э.Г., Севидов В.В., Симонов А.Н., Фокин Г.А. Способ определения координат источника радиоизлучения с борта летательного аппарата с использованием триортогональной рамочной антенной системы. Патент №2709607. МПК G01S 5/04 (2006.01). Бюл. №35 от 19.12.19. Заявка №2019100254 от 09.01.2019.
2. Волков Р.В., Саяпин В.Н., Севидов В.В. Способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов. Патент №2605457. МПК G01S 5/00 (2006.01). Бюл. №35 от 20.12.16. Заявка №2015139916 от 18.09.15 г.
3. Борисов Е.Г., Фокин Г.А., Симонов А.Н., Севидов В.В. Разностно-дальномерный способ определения местоположения источника радиоизлучения в условиях многолучевого распространения радиоволн. Патент №2714303. МПК G01S 5/06 (2006.01). Бюл. №5 от 14.02.20. Заявка №2019115359 от 20.05.2019.
4. Ануфриев А.А., Богдановский С. В., Севидов В.В., Чиркин П.М., Шипунов В.А. Итерационный алгоритм Ньютона-Рафсона в разностно-дальномерной системе координатометрии. Журнал «Научная мысль». Т. 8. №2(32). - Череповец.: ЧВВИУРЭ, 2019. С. 72-78.
5. Севидов В.В. Программа оценки точности разностно-дальномерной системы координатометрии, реализующей итерационный способ Ньютона-Рафсона. Программа для ЭВМ. Свидетельство о регистрации программы для ЭВМ 2022669149, 17.10.2022. Заявка №2022668341 от 10.10.2022.
Изобретение относится к радиотехнике, а именно к способам определения местоположения источника радиоизлучения (ИРИ), и предназначено для использования в навигационных, пеленгационных, локационных средствах для определения местоположения ИРИ. Техническим результатом изобретения является повышение точности определения координат ИРИ в трехмерном пространстве в условиях многолучевого распространения радиоволн (МРРВ). Заявленный способ основан на приеме радиосигналов ИРИ каждым из приемных пунктов (ПП) с известными координатами и измерении времени прихода радиосигнала. Для всех возможных пар ПП вычисляют разности времен прихода радиосигнала от ИРИ до ПП этой пары и по ним вычисляют соответствующие разности дальностей. Формируют набор промежуточных оценок координат (ПОК) ИРИ путем определения разностно-дальномерным способом ПОК для различных комбинаций из четырех ПП. Выявляют ПП, находящиеся в условиях МРРВ. Итоговую оценку координат ИРИ получают путем вычисления среднего арифметического ПОК с учетом выявленных ПП, находящихся в условиях МРРВ. 2 з.п. ф-лы, 11 ил.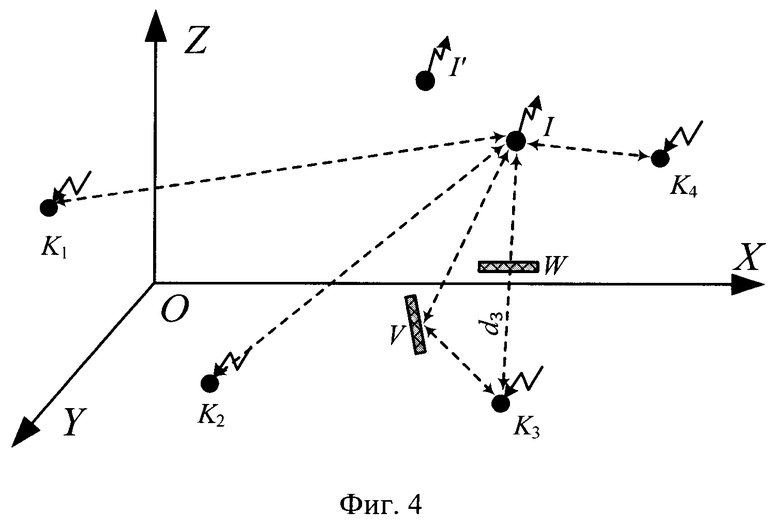
1. Разностно-дальномерный способ определения местоположения источника радиоизлучения (ИРИ) в условиях многолучевого распространения радиоволн (МРРВ), заключающийся в том, что на каждом из приемных пунктов (ПП) с известными координатами принимают радиосигнал ИРИ и относительно времени прихода радиосигнала от ИРИ для всех возможных пар ПП измеряют разности времен прихода радиосигнала от ИРИ до ПП этой пары и по ним вычисляют соответствующие разности дальностей, формируют набор промежуточных оценок координат (ПОК) ИРИ путем определения разностно-дальномерным способом ПОК для различных комбинаций ПП, из этих оценок составляют группы, каждая из которых содержит по меньшей мере четыре ПОК ИРИ, для каждой сформированной группы вычисляют внутригрупповую дисперсию ПОК ИРИ, выявление ПП, находящихся в условиях МРРВ, осуществляют по признаку превышения внутригрупповыми дисперсиями ПОК ИРИ предварительно заданного порога, после чего в наборе ПОК ИРИ оставляют только те ПОК ИРИ, которые получены без использования выявленных ПП, находящихся в условиях МРРВ, для получения итоговой оценки координат ИРИ вычисляют среднее арифметическое оставшихся в наборе ПОК, отличающийся тем, что ПП размещают в 3-мерном пространстве, а набор ПОК ИРИ формируют путем определения разностно-дальномерным способом ПОК в 3-мерном пространстве для каждой возможной комбинации из четырех ПП, не находящихся в одной плоскости, после формирования набора ПОК ИРИ из этих оценок составляют группы, каждая из которых содержит по меньшей мере четыре ПОК ИРИ, для каждой сформированной группы вычисляют внутригрупповую дисперсию ПОК ИРИ, выявление ПП, находящихся в условиях МРРВ, осуществляют по признаку превышения внутригрупповыми дисперсиями ПОК ИРИ предварительно заданного порога, после чего в наборе ПОК ИРИ оставляют только те ПОК ИРИ, которые получены без использования выявленных ПП, находящихся в условиях МРРВ, а для получения итоговой оценки координат ИРИ вычисляют среднее арифметическое оставшихся в наборе ПОК.
2. Способ по п. 1, отличающийся тем, что ПП размещают в 3-мерном пространстве так, чтобы объем многогранника, образованного вершинами с точками, совпадающими с ПП, был максимальным.
3. Способ по п. 1, отличающийся тем, что измерения и расчеты выполняют в декартовой системе координат OXYZ.
