Настоящее техническое решение относится к области измерения расстояния радиотехническими средствами и, более конкретно, к измерению дальности космического аппарата (КА), расположенного на геостационарной орбите.
Измерение дальности КА производится в Наземном Комплексе Управления (НКУ). Персонал НКУ осуществляет операции по дистанционному управлению подсистемами и узлами КА, контролирует работоспособность, параметры и функции КА, также в дистанционном режиме.
Известен «Бортовой ретранслятор системы связи (варианты) и способ ретрансляции широкополосных сигналов», патент РФ №2292117, опубл. 20.01.2007. Аналог содержит блок выделения ошибки синхронизации, цифровой блок управления передатчиком информации, генератор опорных ШПС, блок формирования РД, последовательно соединенные приемное АФУ, блок обработки ШПС, блок выделения сигнала, блок временного уплотнения, модулятор, передатчик группового сигнала и передающее АФУ, а также последовательно соединенные блок выделения командной информации, блок формирования командного сигнала, передатчик командной информации и передающее АФУ с ФАР, причем блок выделения ошибки синхронизации по первому входу соединен со вторым выходом блока обработки ШПС, второй вход блока выделения ошибки синхронизации соединен с первым выходом генератора опорных ШПС, выход блока выделения ошибки синхронизации соединен со вторым входом блока временного уплотнения, генератор опорных ШПС по второму выходу соединен со вторым входом модулятора, вход цифрового блока управления передатчиком информации соединен со вторым выходом блока выделения командной информации, первый выход цифрового блока управления параллельно соединен со вторыми входами передатчика командной информации и передающим АФУ с ФАР, первый вход блока формирования радиоданных соединен со вторым выходом цифрового блока управления передатчиком информации, третий выход генератора опорных ШПС соединен со вторым входом блока формирования РД, а выход блока формирования радиоданных соединен со вторым входом блока формирования командного сигнала. Устройство предназначено для ретрансляции сигналов связи и управления, под которым подразумеваются командные и дальномерные сигналы в виде широкополосных сигналов. Расширение количества и номенклатуры широкополосных сигналов требует соответствующего расширения ширины полосы занимаемых частот. Это приводит к известным сложностям, в первую очередь, к уменьшению отношения сигнал/шум, оказывающего определяющее влияние на погрешность измерения дальности. Это является наиболее существенным недостатком аналога.
Наиболее близкой является система, описанная в US Patent 6864838, March, 8, 2005 «Ranging system and method for satellites (Система и способ измерения дальности спутников)» авторов Harles и др. Известная система в составе КА и НКУ, содержащего время-измерительный узел, опорный генератор и последовательно соединенные мультиплексор/кодер цифровых сигналов S1, S2 и т.д., модулятор QPSK, повышающий преобразователь частоты, антенный пост, понижающий преобразователь частоты, первый приемник, первый демодулятор, первый декодер, первый процессорный блок, выходом подключенный к первому входу время-измерительного блока, а также последовательно соединенные второй приемник, по входу соединенный с выходом модулятора QPSK, второй демодулятор, второй декодер и второй процессорный блок, выходом подключенный ко второму входу время-измерительного блока, причем выход опорного генератора подключен к третьему входу время-измерительного узла.
Далее будем считать, что в ограничительную часть формулы изобретения входит персональный компьютер оператора, который в прототипе не описан, но подразумевается. Объединим модулятор QPSK и повышающий преобразователь частоты под общим названием «передатчик» и под этим названием включим эти блоки в ограничительную часть формулы. Также объединим понижающий преобразователь частоты, первый приемник, первый демодулятор, первый декодер под общим названием приемник и под этим названием включим эти блоки в ограничительную часть формулы.
Недостаток известной системы состоит в низкой точности измерения дальности КА за счет прерывания измерения дальности, вызванного передачей команд, поскольку для передачи команд и одной из дальномерных последовательностей (которых может быть несколько) используется один и тот же радиоканал «вверх». Команды и дальномерные последовательности передаются поочередно с приоритетом в пользу команд. Поэтому измерение дальности в известной системе может производиться с перерывами, вызванными передачей команд, что снижает точность измерения дальности, поскольку затруднено усреднение результатов частных измерений, широко применяемое на практике. Передача в известной системе одной из дальномерных последовательностей производится с НКУ автоматически во время отсутствия команды. Дальномерный сигнал, излученный с антенного поста и принимаемый приемником КА, переизлучается передатчиком КА в сторону НКУ. Дальность определяется по задержке дальномерного сигнала на время прохождения трассы НКУ - КА - НКУ. Если команда передается, то передача дальномерного сигнала прерывается и измерение дальности КА не производится.
Задача предлагаемого технического решения состоит в повышении точности измерения дальности КА путем увеличения точности измерения интервала времени между излучением сигнала и приемом переизлученного КА либо дальномерного, либо командного сигналов, что обеспечивает измерение дальности без перерывов, вызванных необходимостью передачи команд. Измерение времени задержки, вызванного распространением дальномерного или командного сигналов по отмеченной выше трассе, позволяет обеспечить эффективное усреднение результатов частных измерений, что является предпосылкой повышения точности измерения дальности КА.
В известной системе измерения дальности Наземный Комплекс Управления содержит персональный компьютер оператора, мультиплексор/кодер, передатчик, антенный пост, приемник, а также время-измерительный узел и опорный генератор, причем выход мультиплексора/кодера соединен с входом передатчика, выход которого соединен с входом антенного поста, выход которого соединен с приемником, приемопередатчик космического аппарата соединен двумя радиолиниями с антенным постом, опорный генератор соединен с первым входом время-измерительного узла. Поставленная задача решается тем, что в известную систему измерения дальности космического аппарата дополнительно введены узел постоянной памяти команд и узел постоянной памяти дальномерных последовательностей, элемент ИЛИ, коррелятор со схемой поиска и узел усреднения, выход которого является выходом системы. Первый выход персонального компьютера оператора соединен с узлом постоянной памяти команд и первым входом элемента ИЛИ, второй выход персонального компьютера оператора соединен с узлом постоянной памяти дальномерных последовательностей и вторым входом элемента ИЛИ. Первый вход коррелятора со схемой поиска соединен с выходом мультиплексора/кодера, второй вход коррелятора со схемой поиска соединен с выходом приемника, выход коррелятора со схемой поиска соединен со вторым входом время-измерительного узла, третий вход время-измерительного узла соединен с выходом элемента ИЛИ, выход измерительного узла соединен с входом узла усреднения.
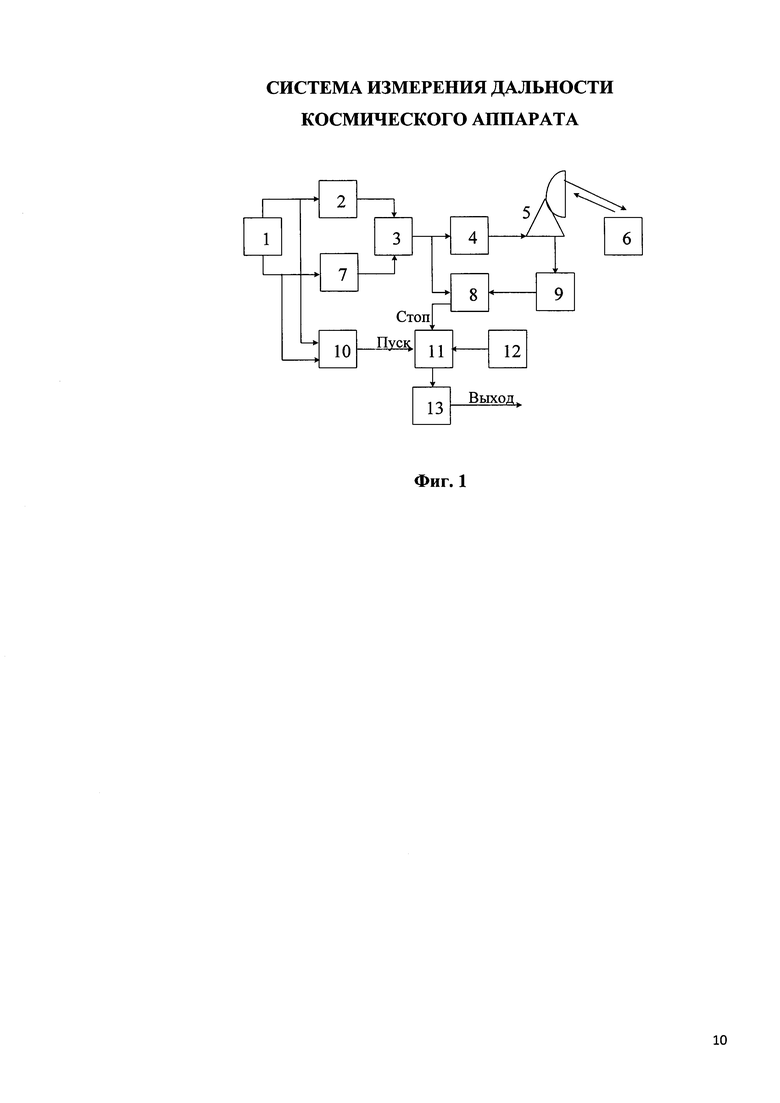
На фиг. 1 приведена структурная схема предлагаемого технического решения. Сущность предложения состоит в том, что измерение дальности не прерывается на время передачи команды.
Система содержит персональный компьютер оператора 1, узел постоянной памяти команд 2, мультиплексор/кодер 3, передатчик 4, антенный пост 5, приемопередатчик КА 6, узел постоянной памяти дальномерных последовательностей 7, коррелятор со схемой поиска 8, приемник 9, элемент ИЛИ 10, время-измерительный узел 11, опорный генератор 12 и узел усреднения 13.
Работает система следующим образом.
С персонального компьютера оператора 1 эпизодически в автоматическом или ручном режиме подается импульс на чтение команд из узла постоянной памяти команд 2. Командная последовательность из узла постоянной памяти команд 2 в форме битового сигнала поступает на передатчик 4 через мультиплексор/кодер 3 и в виде последовательности радиоимпульсов на несущей частоте радиолинии «вверх» через антенный пост 5 поступает на приемопередатчик КА 6. На время отсутствия команд с персонального компьютера оператора 1 автоматически регулярно поступает импульс на чтение дальномерной последовательности из узла постоянной памяти дальномерных последовательностей 7. Дальномерная последовательность также в форме битового сигнала поступает на передатчик 4 через мультиплексор 3 и излучается в сторону приемопередатчика КА 6 через антенный пост 5.
Поэтому на приемопередатчик КА 6 излучается без перерывов либо команда, либо дальномерная последовательность.
Принятая и идентифицированная командная последовательность на борту КА направляется на исполнение узлами и подсистемами КА (здесь не рассматривается). Кроме того, по линии «вниз» с КА принятая команда ретранслируется полностью в сторону НКУ. Принятая на борту КА дальномерная последовательность также ретранслируется по радиолинии «вниз».
Коррелятор со схемой поиска 8 сопоставляет принятую и местную последовательность, поступающую с выхода мультиплексора 3. Схема поиска коррелятора 8 обеспечивает поиск максимума корреляционной функции, который достигается в момент совпадения излучаемой и принятой последовательностей. Импульсом «Пуск» с выхода элемента ИЛИ 10 запускается время-измерительный узел 11 каждый раз при запуске команды или дальномерной последовательности. Импульсом «Стоп» с выхода коррелятора со схемой поиска 8 работа время-измерительного узла 11 прекращается. Длительность интервала времени между импульсами «Пуск» и «Стоп» пропорциональна дальности КА. Измерение длительности этого интервала времени производится путем подсчета количества импульсов опорного генератора 12 за интервал времени между импульсами «Пуск» и «Стоп».
Поэтому на выходе время-измерительного узла 11 регулярно имеют место цифровые эквиваленты длительности измеряемого интервала времени без прерываний, свойственных прототипу. Результаты частных измерений усредняются в узле усреднения 13.
Эффективность предложенного технического решения можно показать следующим путем. Обозначим результат измерения длительности интервала времени
 .
.
Здесь индекс «и» обозначает истинное значение xи длительности интервала времени, Δi погрешность измерения истинного значения в i-ом такте. При этом понимается, что xи, как и дальность КА, за время измерения изменяются в пределах меньше погрешности измерений. Наиболее существенно искажение, вызванное шумом в тракте принимаемого сигнала.
Если команды отправляются достаточно часто, что характерно для неориентированного полета КА, то измерение дальности по прототипу становится невозможным. В этом случае возможны только разовые измерения, при которых погрешность измерения равна Δi. Поскольку в предложенной системе измерения дальности производятся непрерывно как по командным, так и по дальномерным сигналам, то возможно эффективное усреднение результатов k измерений, i∈(1…k), производимое в узле усреднения 13. Считая отдельные Δi некоррелированными, получим:
 .
.
Здесь  - среднее значение погрешности при k измерениях и
- среднее значение погрешности при k измерениях и  .
.
Это выражение опирается на известное положение теории вероятностей:  М - символ математического ожидания.
М - символ математического ожидания.
Широко известно из теории измерений (Е.С. Вентцель. Теория вероятностей. М.: - Высшая школа, 1999), что
Здесь Dp - дисперсия усредненного результата измерений, a Dвх - дисперсия Δi. При k>>1 дисперсия результирующей погрешности Dp стремится к нулю. Это позволяет существенно уменьшить случайную составляющую погрешности измерения дальности КА, вызванную шумом. Иначе дело обстоит, когда необходима неоднократная передача команд. При этом по прототипу эффективность усреднения уменьшается вплоть до потери информации о дальности КА. В соответствии с предложенным техническим решением дальность КА измеряется не только по дальномерной последовательности, но и по командной последовательности, т.е. без перерывов, вызванных посылкой команды. Дальномерная последовательность является псевдослучайной (ПСП, Pseudo-Noise (PN) Ranging Systems. Issue 2. Recommendation for Space Data Standards (Blue Book), CCSDS 414.1-B-2. Washington, D.C.: CCSDS, January, 2014). Наибольшая эффективность предложенной системы измерения дальности КА достигается при кодировании команд псевдослучайной последовательностью с разрядностью, равной разрядности дальномерной ПСП.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2692418C2 |
| КОМАНДНО-ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2620591C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| Контрольно-проверочная аппаратура космического аппарата | 2018 |
|
RU2717293C1 |
| КОНТРОЛЬНО-ПРОВЕРОЧНАЯ АППАРАТУРА КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2563925C1 |
| СПОСОБ ЗАЩИТЫ КОМАНДНО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2554090C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| Гидроакустическая дальномерная система навигации | 2016 |
|
RU2624980C1 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2660676C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
Изобретение относится к измерению дальности космического аппарата (КА), расположенного на геостационарной орбите. Достигаемый технический результат – повышение точности измерения дальности КА. Указанный результат достигается за счет того, что система измерения дальности КА состоит из приемопередатчика космического аппарата и наземного комплекса управления (НКУ), содержащего персональный компьютер оператора, мультиплексор/кодер, передатчик, антенный пост, приемник, время-измерительный узел, опорный генератор, узел постоянной памяти команд и узел постоянной памяти дальномерных последовательностей, элемент ИЛИ, коррелятор со схемой поиска и узел усреднения, выход которого является выходом системы, причем первый выход персонального компьютера оператора соединен с узлом постоянной памяти команд и первым входом элемента ИЛИ, второй выход персонального компьютера оператора соединен с узлом постоянной памяти дальномерных последовательностей и вторым входом элемента ИЛИ, первый вход коррелятора со схемой поиска соединен с выходом мультиплексора/кодера, второй вход коррелятора со схемой поиска соединен с выходом приемника, выход коррелятора со схемой поиска соединен со вторым входом время-измерительного узла, третий вход время-измерительного узла соединен с выходом элемента ИЛИ, выход измерительного узла соединен с входом узла усреднения, выход мультиплексора/кодера соединен с входом передатчика, выход которого соединен с входом антенного поста, выход которого соединен с приемником, приемопередатчик КА соединен двумя радиолиниями с антенным постом, опорный генератор соединен с первым входом время-измерительного узла. 1 ил.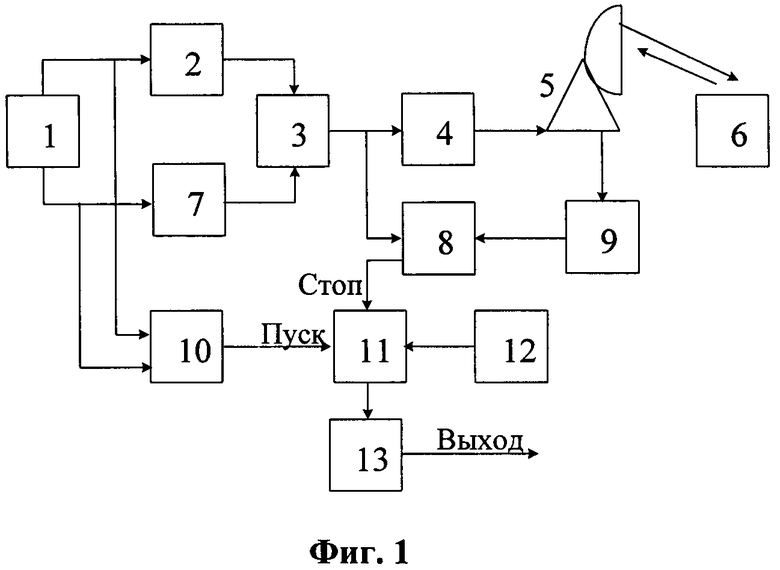
Система измерения дальности космического аппарата, состоящая из приемопередатчика космического аппарата и наземного комплекса управления, содержащего персональный компьютер оператора, мультиплексор/кодер, передатчик, антенный пост, приемник, а также время-измерительный узел и опорный генератор, причем выход мультиплексора/кодера соединен с входом передатчика, выход которого соединен с входом антенного поста, выход которого соединен с приемником, приемопередатчик космического аппарата соединен двумя радиолиниями с антенным постом, опорный генератор соединен с первым входом время-измерительного узла, отличающаяся тем, что в нее дополнительно введены узел постоянной памяти команд и узел постоянной памяти дальномерных последовательностей, элемент ИЛИ, коррелятор со схемой поиска и узел усреднения, выход которого является выходом системы, причем первый выход персонального компьютера оператора соединен с узлом постоянной памяти команд и первым входом элемента ИЛИ, второй выход персонального компьютера оператора соединен с узлом постоянной памяти дальномерных последовательностей и вторым входом элемента ИЛИ, первый вход коррелятора со схемой поиска соединен с выходом мультиплексора/кодера, второй вход коррелятора со схемой поиска соединен с выходом приемника, выход коррелятора со схемой поиска соединен со вторым входом время-измерительного узла, третий вход время-измерительного узла соединен с выходом элемента ИЛИ, выход измерительного узла соединен с входом узла усреднения.
| US 6864838 B2, 08.03.2005 | |||
| СПОСОБ ПРЕЦИЗИОННОГО ИЗМЕРЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ИЗЛУЧАЮЩИХ И ОТРАЖАЮЩИХ ОБЪЕКТОВ | 2003 |
|
RU2254588C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ В ДОПЛЕРОВСКИХ ИЗМЕРИТЕЛЯХ ВЕКТОРА СКОРОСТИ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2018864C1 |
| RU 2013133214 A, 27.01.2015 | |||
| US 2002135509 A1, 26.09.2002 | |||
| KR 20090000760 A, 08.01.2009 | |||
| US 6718174 B2, 06.04.2004. | |||

