Изобретение относится к машиностроению, в частности к робототехнике, а именно к манипуляционным механизмам роботов с тремя степенями свободы.
Технический результат - повышение технической и эксплуатационной эффективности устройств манипулирования по трем координатам на базе возможности изменения структуры, с тем чтобы один и тот же механизм выполнял поступательные трехкоординатные движения в пространстве, а также сферические ориентирующие движения - вращения вокруг одной точки.
Известно устройство (монография Xianwen Kong and Clement Gosselin, Type Synthesis of Parallel Mechanisms, Springer-Verlag Berlin Heidelberg 2007 (Fig.f page 7), включающее основание, выходное звено, три кинематические цепи, содержащие каждая входную вращательную кинематическую пару, причем оси всех входных вращательных кинематических пар расположены с пересечением в одной точке, начальную вращательную кинематическую пару и конечную вращательную кинематическую пару, причем оси всех конечных вращательных кинематических пар расположены с пересечением в одной точке, совпадающей с точкой пересечения всех входных вращательных кинематических пар. Недостатком данного устройства является необходимость расположения звеньев на близких сферических поверхностях.
Известно устройство (монография J.-P. Meriet, Parallel Robots (Second Edition), Springer 2006, (Fig.2,10 page 35), включающее основание, выходное звено, три кинематические цепи, содержащие каждая входную вращательную кинематическую пару, начальную вращательную кинематическую пару, ось которой расположена перпендикулярно оси входной кинематической пары и конечную вращательную кинематическую пару. Недостатком данного устройства является то, что механизм выполняет только поступательные движения.
Известен механизм с тремя степенями свободы, включающий основание, выходное звено, три кинематические цепи, каждая из которых содержит входную вращательную кинематическую пару, начальную вращательную кинематическую пару, поступательную кинематическую пару, промежуточную вращательную кинематическую пару, конечную вращательную кинематическую пару, причем оси начальной и промежуточной вращательных кинематических пар расположены параллельно друг к другу, ось начальной вращательной кинематической пары расположена с пересечением оси входной вращательной кинематической пары, перпендикулярно ей, а ось промежуточной вращательной кинематической пары расположена с пересечением оси конечной вращательной кинематической пары, перпендикулярно ей (монография J.-P. Merlet, Parallel Robots (Second Edition), Springer 2006, (Fig.2.14, page 38, левый рисунок).
Недостатком данного устройства является то, что механизм выполняет только сферические ориентирующие движения - вращения только вокруг одной точки.
Техническим результатом является повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по трем координатам на базе возможности изменения структуры, с тем чтобы один и тот же механизм выполнял поступательные трехкоординатные движения в пространстве, а также сферические ориентирующие движения - вращения вокруг одной точки.
Указанный технический результат достигается тем, что в механизме с тремя степенями свободы, включающем основание, выходное звено, три кинематические цепи, каждая из которых содержит входную вращательную кинематическую пару, начальную вращательную кинематическую пару, поступательную кинематическую пару, промежуточную вращательную кинематическую пару, конечную вращательную кинематическую пару, причем оси начальной и промежуточной вращательных кинематических пар расположены параллельно друг другу, ось начальной вращательной кинематической пары расположена с пересечением оси входной вращательной кинематической пары, перпендикулярно ей, а ось промежуточной вращательной кинематической пары расположена с пересечением оси конечной вращательной кинематической пары, перпендикулярно ей. Каждая кинематическая цепь снабжена приводом, ось которого расположена с пересечением оси входной вращательной кинематической пары, и перпендикулярно ей, при этом приводы выполнены с возможностью обеспечения вращательных движений и поступательных перемещений выходного звена, а оси всех конечных вращательных кинематических пар расположены с пересечением в одной точке.
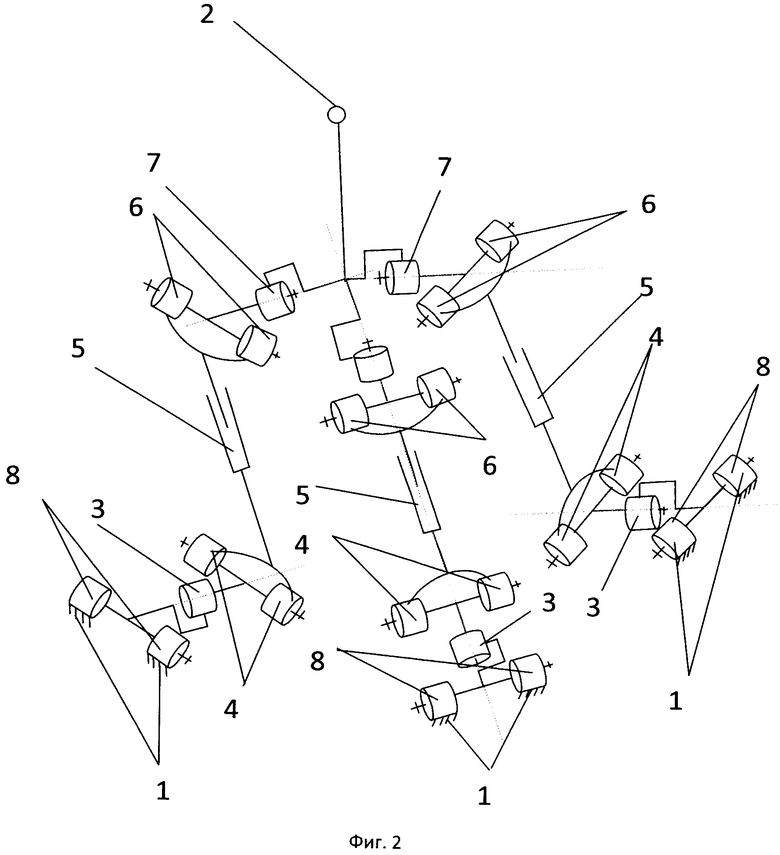
Описание устройства - сферического механизма представлено на фиг.1 и 2.
Механизм с тремя степенями свободы включает основание 1, выходное звено 2, три кинематические цепи, каждая из которых содержит входную вращательную кинематическую пару 3, начальную вращательную кинематическую пару 4, поступательную кинематическую пару 5, промежуточную вращательную кинематическую пару 6, конечную вращательную кинематическую пару 7, причем оси начальной 4 и промежуточной 6 вращательных кинематических пар расположены параллельно друг другу, ось начальной вращательной кинематической пары 4 расположена с пересечением оси входной вращательной кинематической пары 3, перпендикулярно ей, а ось промежуточной вращательной кинематической пары 6 расположена с пересечением оси конечной вращательной кинематической пары 7, перпендикулярно ей, при этом каждая кинематическая цепь снабжена приводом 8, ось которого расположена с пересечением оси входной вращательной кинематической пары 3, и перпендикулярно ей, при этом приводы выполнены с возможностью обеспечения вращательных движений и поступательных перемещений выходного звена 2, а оси всех конечных вращательных кинематических пар 7 расположены с пересечением в одной точке.
Устройство - механизм с тремя степенями свободы работает следующим образом: относительно основания 1 выходное звено 2 перемещается по трем координатам посредством трех соединительных кинематических цепей, при этом с каждой входной вращательной кинематической пары 3, оси которых распложены с пересечением в одной точке, движение передается на начальную вращательную кинематическую пару 4, ось которой расположена перпендикулярно оси входной кинематической пары 3, далее движение передается на поступательную кинематическую пару 5, ось которой расположена перпендикулярно оси начальной вращательной кинематической пары 4, затем движение передается на промежуточную вращательную кинематическую пару 6, ось которой расположена параллельно оси начальной вращательной кинематической пары 4, и затем на конечную вращательную кинематическую пару 7, причем оси всех конечных вращательных кинематических пар 7 расположены с пересечением в одной точке. Для осуществления вращательных движений приводы 8 устанавливается в такое положение, чтобы оси входных 3 и конечных 7 вращательных кинематических пар пересекались бы в одной точке (Фиг.1), после этого приводы фиксируются и у выходного звена 2 остаются только вращательные степени свободы. Для осуществления поступательных перемещений выходного звена 2 приводы 8 разблокируются, затем с их помощью кинематические цепи выстраивают таким образом, чтобы оси соответствующих входных 3 и конечных 7 вращательных кинематических пар были бы параллельны друг другу, после чего приводы 8 снова фиксируются, оставляя выходному звену 2 лишь поступательные перемещения (Фиг.2), тем самым достигается расширение функциональных возможностей механизма, который может выполнять как поступательные (Фиг. 1) так и вращательные движения (Фиг.2).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534675C1 |
| ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2465124C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403141C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403140C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ТРЕМЯ ПОСТУПАТЕЛЬНЫМИ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2466013C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2536735C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2525466C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
Изобретение относится к машиностроению, в частности к робототехнике. Механизм включает основание, выходное звено, три кинематические цепи, каждая из которых содержит входную вращательную кинематическую пару, начальную вращательную кинематическую пару, поступательную кинематическую пару, промежуточную вращательную кинематическую пару, конечную вращательную кинематическую пару. Оси начальной и промежуточной вращательных кинематических пар расположены параллельно друг другу, ось начальной вращательной кинематической пары расположена с пересечением оси входной вращательной кинематической пары, перпендикулярно ей, а ось промежуточной вращательной кинематической пары расположена с пересечением оси конечной вращательной кинематической пары, перпендикулярно ей. Причем каждая кинематическая цепь снабжена приводом, ось которого расположена с пересечением оси входной вращательной кинематической пары, и перпендикулярно ей, приводы выполнены с возможностью обеспечения вращательных движений и поступательных перемещений выходного звена, а оси всех конечных вращательных кинематических пар расположены с пересечением в одной точке. Изобретение обеспечивает выполнение поступательных трехкоординатных движений в пространстве и сферических ориентирующих движений - вращений вокруг одной точки. 2 ил.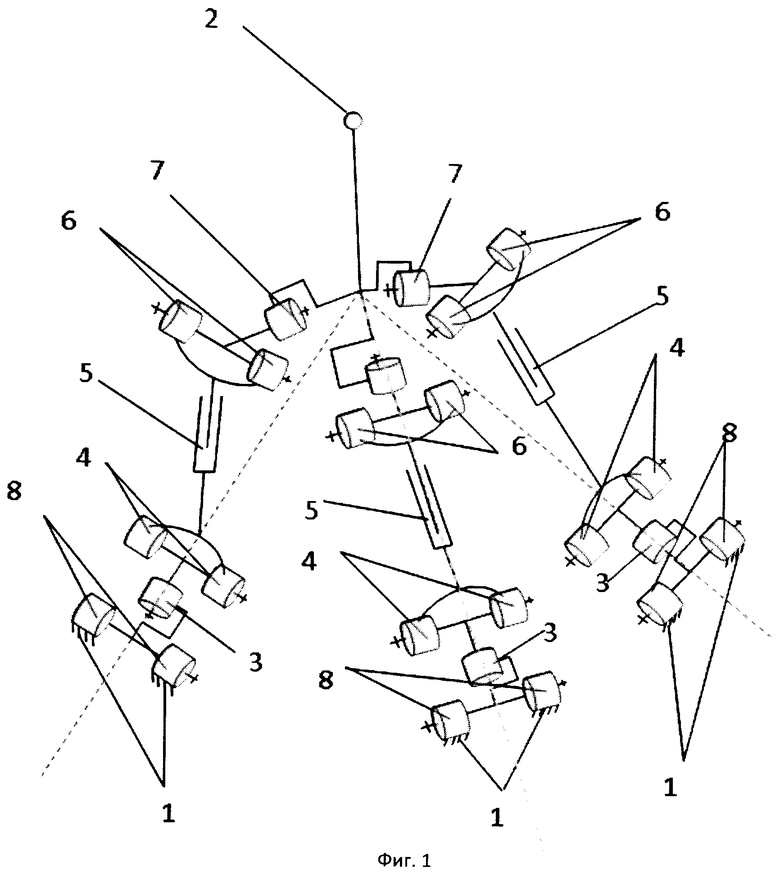
Механизм с тремя степенями свободы, включающий основание, выходное звено, три кинематические цепи, каждая из которых содержит входную вращательную кинематическую пару, начальную вращательную кинематическую пару, поступательную кинематическую пару, промежуточную вращательную кинематическую пару, конечную вращательную кинематическую пару, причем оси начальной и промежуточной вращательных кинематических пар расположены параллельно друг к другу, ось начальной вращательной кинематической пары расположена с пересечением оси входной вращательной кинематической пары, перпендикулярно ей, а ось промежуточной вращательной кинематической пары расположена с пересечением оси конечной вращательной кинематической пары, перпендикулярно ей, отличающийся тем, что каждая кинематическая цепь снабжена приводом, ось которого расположена с пересечением оси входной вращательной кинематической пары, и перпендикулярно ей, при этом приводы выполнены с возможностью обеспечения вращательных движений и поступательных перемещений выходного звена, а оси всех конечных вращательных кинематических пар расположены с пересечением в одной точке.
| J.-P | |||
| MERLET, Parallel Robots | |||
| Second Edition., Springer 2006, Fig.2.14, page 38 | |||
| Обмазка для покрытия электродов | 1955 |
|
SU110326A1 |
| Способ изготовления инструментального материала | 1955 |
|
SU111896A1 |
| Kong X., Gosselin C, "Type Synthesis of Parallel Mechanisms", Springer Tracts in Advanced Robotics Volume 33, 2007, Fig.7.10 | |||
| Устройство для жеребьевки | 1990 |
|
SU1755838A1 |

