Изобретение относится к навигационному приборостроению и предназначено для оценки основных характеристик блока инерциальных измерителей бесплатформенной инерциальной навигационной системы, содержащего по меньшей мере три однотипных одноосных акселерометрических измерителя с некомпланарными измерительными осями и три однотипных одноосных гироскопических измерителя с некомпланарными измерительными осями.
Оценивание основных характеристик блока инерциальных измерителей осуществляется путем обработки информации акселерометрических измерителей, полученной в стационарных положениях, и информации гироскопических измерителей, полученной в стационарных положениях и в процессе поворотов посадочной поверхности двухосного поворотного стола с жестко закрепленным на ней блоком инерциальных измерителей.
Известен способ калибровки бесплатформенных инерциальных навигационных систем (далее - БИНС) из патента РФ №2406973 с датой приоритета 05.02.2009, заключающийся в определении коэффициентов модели ошибок БИНС, основанном на осуществлении с помощью калибровочного стола последовательности поворотов системы в требуемые фиксированные положения и вычислении калибровочных коэффициентов. При этом калибровочные коэффициенты инерциальных измерителей навигационной системы определяются в два этапа: на первом этапе по составляющим вектора ошибок системы, полученным по показаниям системы, показаниям калибровочного стола и значениям широты места установки калибровочного стола, определяются входные сигналы модели ошибок навигационной системы, являющиеся функциями калибровочных коэффициентов, на втором этапе по входным сигналам модели ошибок системы вычисляются калибровочные коэффициенты инерциальных измерителей.
Недостатком известного способа калибровки БИНС с помощью калибровочного наклонно-поворотного стола является задействование показаний калибровочного стола для расчета входных сигналов модели ошибок навигационной системы.
В технической литературе известен [1] алгоритм калибровки БИНС на двухосном поворотном столе, заключающийся в расчете калибровочных коэффициентов для датчиков поступательного и углового движения, входящих в состав системы, используя для этого данные об ошибках определения навигационных параметров и параметров ориентации и задавшись моделями ошибок БИНС и датчиков.
Недостатком указанного алгоритма калибровки БИНС является необходимость использования прецизионного поворотного стола и предварительных операций по горизонтированию и ориентированию в азимуте места установки БИНС. Кроме того, после каждой переориентации системы проводится ее начальная выставка.
В качестве прототипа принят способ определения погрешностей основных характеристик блока инерциальных измерителей (патент РФ №2626288 с датой приоритета 21.03.2016) путем обработки измерительной информации, полученной в фиксированных положениях блока, посредством минимизации функции рассогласования, которая определяет суммарное отклонение величины физической характеристики, полученной с использованием выходного кода измерителей, от соответствующего эталонного значения.
Недостатком рассматриваемого в качестве прототипа способа определения погрешностей основных характеристик блока инерциальных измерителей является обработка измерительной информации, относящейся только к фиксированным (стационарным) положениям, без задействования информации на участках поворотов. Данное обстоятельство не позволяет осуществить взаимную привязку по угловому положению осей чувствительности акселерометрических и гироскопических измерителей между собой в рамках блока инерциальных измерителей. Кроме того, в указанном прототипе не рассмотрен вопрос о количестве выставляемых положений, достаточном для определения погрешностей основных характеристик блока инерциальных измерителей.
Технической задачей изобретения является повышение точности определения погрешностей основных характеристик блока инерциальных измерителей путем организации многопозиционной схемы поворотов посадочной поверхности двухосного поворотного стола с установленным на ней блоком инерциальных измерителей в определенные стационарные положения и последующей обработки зарегистрированной измерительной информации. При этом количество выставляемых положений и переходов между ними должно быть минимальным. Специальные требования к начальному положению и начальной ориентации блока инерциальных измерителей при его установке на посадочной поверхности двухосного поворотного стола не предъявляются. Выставку в определенные стационарные положения и измерение текущего углового положения посадочной поверхности двухосного поворотного стола допускается осуществлять с относительно невысокой точностью (до 1°), при этом должна быть обеспечена высокая стабильность ориентации (до 1 угл. мин) осей вращения двухосного поворотного стола.
Технические результаты заявляемого способа оценивания погрешностей основных характеристик блока инерциальных измерителей на двухосном поворотном столе заключаются:
- в формировании многопозиционной схемы поворотов, состоящей из девяти стационарных положений, выставляемых путем заданной последовательности из восьми одиночных поворотов вокруг одной из двух (внешней и внутренней) осей вращения поворотного стола при зафиксированной другой оси вращения, и обеспечивающей оценку типовых погрешностей основных характеристик акселерометрических и гироскопических измерителей (погрешность масштабного коэффициента, смещение нулевого сигнала), а также оценку погрешностей углового положения осей чувствительности акселерометрических и гироскопических измерителей;
- в повышении точности оценки основных характеристик блока инерциальных измерителей за счет привязки углового положения осей чувствительности акселерометрических и гироскопических измерителей к единой расчетной ортогональной системе координат, связанной с блоком инерциальных измерителей (далее - связанная система координат).
Указанные технические результаты заявляемого способа оценивания погрешностей основных характеристик блока инерциальных измерителей достигаются за счет того, что на первом этапе реализуют многопозиционную схему поворотов посадочной поверхности двухосного поворотного стола с жестко установленным на ней блоком инерциальных измерителей. Схема поворотов включает в себя девять стационарных положений, выставляемых путем заданной последовательности из восьми одиночных поворотов вокруг одной из двух (внешней и внутренней) осей вращения поворотного стола при зафиксированной другой оси вращения. При этом гироскопическую измерительную информацию регистрируют как в стационарных положениях, так и в процессе поворотов, акселерометрическую измерительную информацию достаточно регистрировать только в стационарных положениях.
Указанные девять стационарных положений в совокупности характеризуются следующим. Шесть из девяти стационарных положений обеспечивают выставку вверх и вниз относительно плоскости местного горизонта каждой из трех осей связанной системы координат. В трех оставшихся стационарных положениях каждая из трех осей связанной системы координат лежит в плоскости местного горизонта, а две другие находятся под углом 45° к плоскости местного горизонта.
Восемь одиночных поворотов двухосного поворотного стола включают в себя три группы последовательных поворотов (далее - группы парных поворотов) относительно некоторой оси вращения, зафиксированной для каждой такой группы. При этом три группы парных поворотов выбраны так, чтобы номинальные направления соответствующих осей вращения в связанной системе координат являлись бы взаимно ортогональными (с допустимым уровнем отклонения от расчетного до 1°). В свою очередь, повороты в каждой группе парных поворотов характеризуются тем, что среди них имеются два поворота с углами, каждый из которых по отдельности и в сумме друг с другом не кратен 360°.
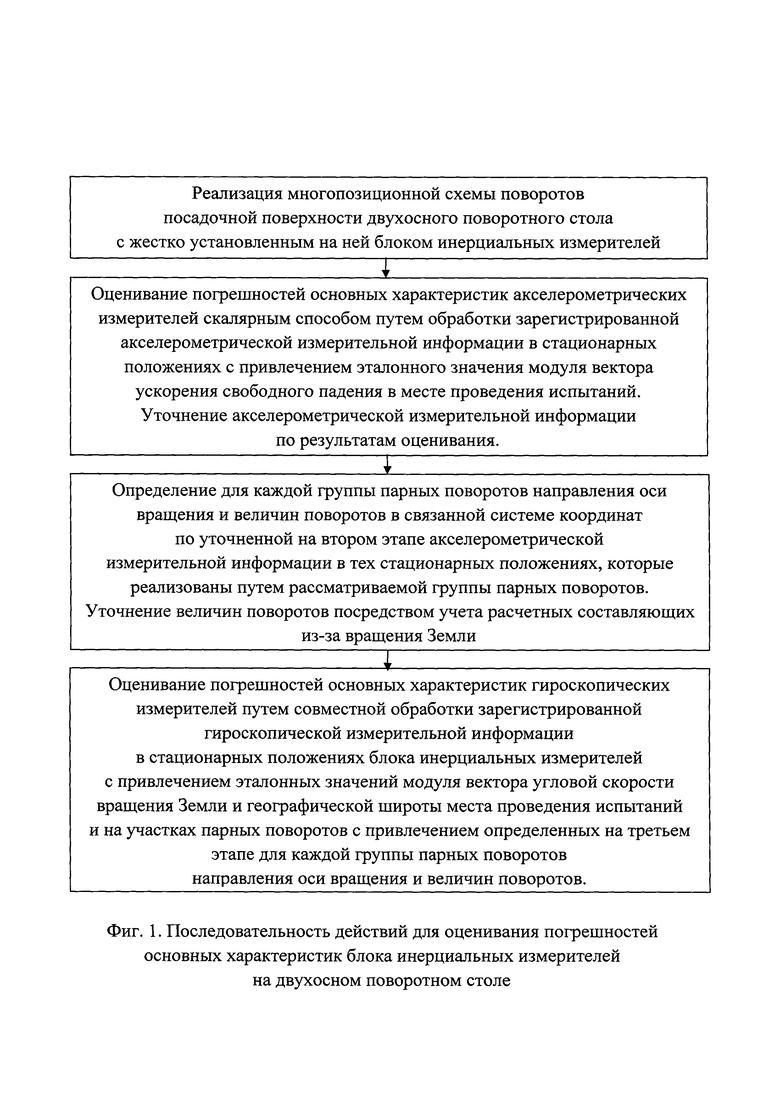
На втором этапе известным в технической литературе скалярным способом оценивают погрешности основных характеристик акселерометрических измерителей путем обработки зарегистрированной акселерометрической измерительной информации в стационарных положениях с привлечением эталонного значения модуля вектора ускорения свободного падения в месте проведения испытаний. По результатам оценивания проводят уточнение акселерометрической измерительной информации.
На третьем этапе для каждой группы парных поворотов определяют направление оси вращения и величины поворотов в связанной системе координат по уточненной на втором этапе акселерометрической измерительной информации в тех стационарных положениях, которые реализованы путем рассматриваемой группы парных поворотов, включая стационарные положения в начале и конце данной группы. Далее полученные для каждой группы парных поворотов оценки величин поворотов дополняют расчетными составляющими из-за вращения Земли.
На четвертом этапе оценивают погрешности основных характеристик гироскопических измерителей путем совместной обработки зарегистрированной гироскопической измерительной информации в стационарных положениях блока инерциальных измерителей с привлечением эталонных значений модуля вектора угловой скорости вращения Земли и географической широты места проведения испытаний и на участках парных поворотов с привлечением определенных на третьем этапе для каждой группы парных поворотов направления оси вращения и величин поворотов.
На фиг. 1 представлена последовательность действий для оценки погрешностей основных характеристик блока инерциальных измерителей.
Рассмотрим реализацию предлагаемого способа на примере оценки погрешностей блока инерциальных измерителей, состоящего из трех однотипных акселерометрических измерителей с взаимно некомпланарными измерительными осями и трех однотипных гироскопических измерителей с взаимно некомпланарными измерительными осями.
Решение данной задачи осуществляется в четыре этапа.
На первом этапе реализуют многопозиционную схему поворотов блока инерциальных измерителей на двухосном поворотном столе, удовлетворяющую указанным выше условиям.
Один из возможных вариантов последовательности из восьми одиночных поворотов в девять стационарных положений представлен в таблице 1.
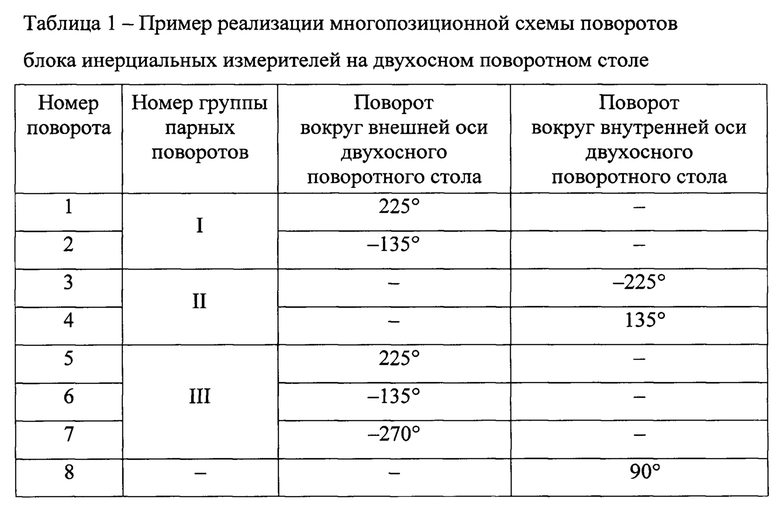
При этом внешняя ось вращения поворотного стола располагается в плоскости местного горизонта с погрешностью до 1°, а внутренняя ось вращения в исходном положении (в первом из девяти стационарных положений) перпендикулярна внешней оси с погрешностью до 1°.
Информацию акселерометрических измерителей регистрируют в стационарных положениях, информацию гироскопических измерителей - как в стационарных положениях, так и на участках поворотов.
На втором этапе выполняют оценку параметров математической модели акселерометрических измерителей в части типовых погрешностей (погрешность масштабного коэффициента, смещение нулевого сигнала), а также оценку погрешностей углового положения осей чувствительности в связанной системе координат посредством скалярного способа, описанного, например, в [2, 3] и нечувствительного к погрешностям выставки в заданные стационарные положения. Порядок действий заключается в следующем. Сначала для каждого из девяти стационарных положений формируют соотношения, позволяющие рассчитать по акселерометрической измерительной информации соответствующие отклонения модуля измеряемой величины вектора ускорения свободного падения от его эталонного значения в месте проведения испытаний. Затем путем минимизации функционала, включающего в себя указанные отклонения, получают оценку параметров математической модели акселерометрических измерителей. В завершение с учетом полученных оценок проводят уточнение акселерометрической измерительной информации.
На третьем этапе для каждой из трех групп парных поворотов, указанных в таблице 1, осуществляют следующую последовательность действий. Из набора стационарных положений выделяют те, которые реализованы в процессе выполнения рассматриваемой группы парных поворотов, включая стационарные положения в начале и конце данной группы. Для каждого выделенного стационарного положения по уточненной на предыдущем этапе акселерометрической измерительной информации определяют вектор кажущегося ускорения (за счет действия силы тяжести Земли) в связанной системе координат. По набору векторов кажущегося ускорения, определенных для одной и той же группы парных поворотов определяют направление оси вращения и величины поворотов блока инерциальных измерителей в связанной системе координат. Далее полученные оценки величин поворотов дополняют составляющими из-за вращения Земли.
На четвертом этапе выполняют оценку параметров математической модели гироскопических измерителей в части типовых погрешностей (погрешность масштабного коэффициента, смещение нулевого сигнала), а также оценку погрешностей углового положения осей чувствительности в связанной системе координат путем обработки гироскопической измерительной информации с привлечением эталонной информации. Для стационарных положений в качестве эталона выступают модуль вектора угловой скорости вращения Земли и значение географической широты места проведения испытаний, на участках парных поворотов - направление оси вращения и величины поворотов, определенные на третьем этапе для каждой группы парных поворотов. В целом, четвертый этап представляет собой комбинацию скалярного и векторного способов оценки.
Порядок действий заключается в следующем. Сначала для каждого из девяти стационарных положений формируют два вида соотношений. Один вид соотношений позволяет рассчитать по гироскопической измерительной информации соответствующие отклонения модуля измеряемой величины вектора скорости вращения Земли от его эталонного значения. Другой вид соотношений позволяет рассчитать отклонения соответствующих оценок угла между вектором ускорения свободного падения по данным акселерометрических измерителей и вектором скорости вращения Земли по данным гироскопических измерителей от эталонного значения географической широты в месте проведения испытаний. Далее для каждой группы парных поворотов формируют соотношения, которые позволяют рассчитать отклонение оценки вектора поворота по гироскопической измерительной информации от оценки вектора поворота по акселерометрической измерительной информации, полученной на третьем этапе в виде направления оси вращения и величин поворотов. Затем путем минимизации функционала, включающего в себя указанные группы отклонений, получают оценку параметров математической модели гироскопических измерителей.
Таким образом, формирование многопозиционной схемы поворотов, состоящей из девяти стационарных положений, выставляемых путем заданной последовательности из восьми одиночных поворотов вокруг одной из двух (внешней и внутренней) осей вращения поворотного стола при зафиксированной другой оси вращения, обеспечивающей оценку типовых погрешностей основных характеристик акселерометрических и гироскопических измерителей (погрешность масштабного коэффициента, смещение нулевого сигнала) и оценку погрешностей углового положения осей чувствительности акселерометрических и гироскопических измерителей, а также повышение точности оценки основных характеристик блока инерциальных измерителей за счет привязки углового положения осей чувствительности акселерометрических и гироскопических измерителей к единой расчетной ортогональной системе координат, связанной с блоком инерциальных измерителей, достигается за счет того, что на первом этапе реализуют многопозиционную схему поворотов посадочной поверхности двухосного поворотного стола с жестко установленным на ней блоком инерциальных измерителей. Схема поворотов включает в себя девять стационарных положений, выставляемых путем заданной последовательности из восьми одиночных поворотов вокруг одной из двух (внешней и внутренней) осей вращения поворотного стола при зафиксированной другой оси вращения. При этом гироскопическую измерительную информацию регистрируют как в стационарных положениях, так и в процессе поворотов, акселерометрическую измерительную информацию достаточно регистрировать только в стационарных положениях. Указанные девять стационарных положений в совокупности характеризуются следующим. Шесть из девяти стационарных положений обеспечивают выставку вверх и вниз относительно плоскости местного горизонта каждой из трех осей связанной системы координат. В трех оставшихся стационарных положениях каждая из трех осей связанной системы координат лежит в плоскости местного горизонта, а две другие находятся под углом 45° к плоскости местного горизонта. Восемь одиночных поворотов двухосного поворотного стола включают в себя три группы парных поворотов относительно некоторой оси вращения, зафиксированной для каждой такой группы. При этом три группы парных поворотов выбраны так, чтобы номинальные направления соответствующих осей вращения в связанной системе координат являлись бы взаимно ортогональными (с допустимым уровнем отклонения от расчетного до 1°). В свою очередь, повороты в каждой группе парных поворотов характеризуются тем, что среди них имеются два поворота с углами, каждый из которых по отдельности и в сумме друг с другом не кратен 360°.
На втором этапе известным в технической литературе скалярным способом оценивают погрешности основных характеристик акселерометрических измерителей путем обработки зарегистрированной акселерометрической измерительной информации в стационарных положениях с привлечением эталонного значения модуля вектора ускорения свободного падения в месте проведения испытаний. По результатам оценивания проводят уточнение акселерометрической измерительной информации.
На третьем этапе для каждой группы парных поворотов определяют направление оси вращения и величины поворотов в связанной системе координат по уточненной на втором этапе акселерометрической измерительной информации в тех стационарных положениях, которые реализованы путем рассматриваемой группы парных поворотов, включая стационарные положения в начале и конце данной группы. Далее полученные для каждой группы парных поворотов оценки величин поворотов дополняют расчетными составляющими из-за вращения Земли.
На четвертом этапе оценивают погрешности основных характеристик гироскопических измерителей путем совместной обработки зарегистрированной гироскопической измерительной информации в стационарных положениях блока инерциальных измерителей с привлечением эталонных значений модуля вектора угловой скорости вращения Земли и географической широты места проведения испытаний и на участках парных поворотов с привлечением определенных на третьем этапе для каждой группы парных поворотов направления оси вращения и величин поворотов.
Литература:
1 Веремеенко К.К., Галай И.А. Разработка алгоритма калибровки инерциальной навигационной системы на двухосном испытательном стенде [Электронный ресурс] // Электронный журнал "Труды МАИ". - 2013. - №63. URL: https://elibrary.ru (дата обращения 18.12.2018).
2 Измайлов А.Е. Исследование точности прецизионных акселерометров и повышение их качества: диссертация кандидата технических наук. Москва, 2003. 164 с.
3 Аврутов В.В. О скалярной калибровке блока гироскопов и акселерометров [Текст] // Вiсник НТУУ "КПI, Серiя ПРИЛАДОБУДУВАННЯ. - 2010. - Вип.40. - С. 10-17.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ОСНОВНЫХ ХАРАКТЕРИСТИК БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ | 2016 |
|
RU2626288C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ИНЕРЦИАЛЬНОГО ПЕЛЕНГОВАНИЯ ЗАДАННОГО ОБЪЕКТА ВИЗИРОВАНИЯ И ИНЕРЦИАЛЬНЫЙ ДИСКРИМИНАТОР СИГНАЛОВ ПЕЛЕНГОВАНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442185C2 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| Способ калибровки погрешностей инерциального измерительного блока на базе лазерных гироскопов с использованием динамического стенда | 2021 |
|
RU2803878C2 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
Изобретение относится к навигационному приборостроению и предназначено для оценки основных характеристик блока инерциальных измерителей бесплатформенной инерциальной навигационной системы, содержащего по меньшей мере три однотипных одноосных акселерометрических измерителя с некомпланарными измерительными осями и три однотипных одноосных гироскопических измерителя с некомпланарными измерительными осями. Способ оценивания погрешностей основных характеристик блока инерциальных измерителей на двухосном поворотном столе заключается в том, что на первом этапе реализуют многопозиционную схему поворотов посадочной поверхности двухосного поворотного стола с жестко установленным на ней блоком инерциальных измерителей. Схема поворотов включает в себя девять стационарных положений, выставляемых путем заданной последовательности из восьми одиночных поворотов вокруг одной из двух (внешней и внутренней) осей вращения поворотного стола при зафиксированной другой оси вращения. На втором этапе скалярным способом оценивают погрешности основных характеристик акселерометрических измерителей путем обработки зарегистрированной акселерометрической измерительной информации в стационарных положениях с привлечением эталонного значения модуля вектора ускорения свободного падения в месте проведения испытаний. По результатам оценивания проводят уточнение акселерометрической измерительной информации. На третьем этапе для каждой группы парных поворотов определяют направление оси вращения и величины поворотов в связанной системе координат с использованием уточненной на втором этапе акселерометрической измерительной информации в тех стационарных положениях, которые реализованы путем рассматриваемой группы парных поворотов, включая стационарные положения в начале и конце данной группы. Далее определенные для каждой группы парных поворотов величины поворотов уточняют посредством учета расчетных составляющих из-за вращения Земли. На четвертом этапе оценивают погрешности основных характеристик гироскопических измерителей путем совместной обработки зарегистрированной гироскопической измерительной информации в стационарных положениях блока инерциальных измерителей с привлечением эталонных значений модуля вектора угловой скорости вращения Земли и географической широты места проведения испытаний и на участках парных поворотов с привлечением определенных на третьем этапе для каждой группы парных поворотов направления оси вращения и величин поворотов. Технический результат – повышение точности оценки основных характеристик блока инерциальных измерителей за счет привязки углового положения осей чувствительности акселерометрических и гироскопических измерителей к единой расчетной ортогональной системе координат, связанной с блоком инерциальных измерителей. 1 ил., 1 табл.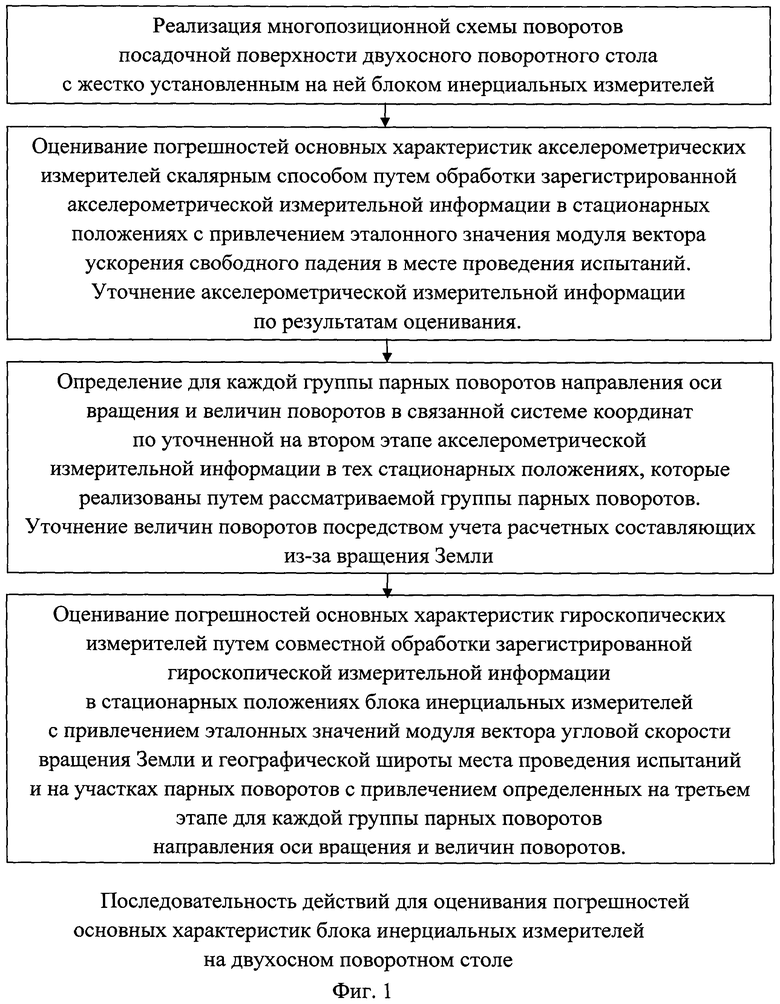
Способ оценивания погрешностей основных характеристик блока инерциальных измерителей на двухосном поворотном столе, заключающийся в выставке блока инерциальных измерителей, содержащего не менее трех однотипных одноосных акселерометрических измерителей с некомпланарными измерительными осями и не менее трех однотипных одноосных гироскопических измерителей с некомпланарными измерительными осями, в определенные девять стационарных положений, включая одно произвольное исходное положение, путем восьми одиночных поворотов вокруг одной из двух осей вращения двухосного поворотного стола при зафиксированной другой оси вращения и регистрации акселерометрической измерительной информации в стационарных положениях и непрерывной регистрации гироскопической измерительной информации как в стационарных положениях, так и на участках поворотов с последующей обработкой, отличающийся тем, что на первом этапе шесть из девяти стационарных положений обеспечивают выставку вверх и вниз относительно плоскости местного горизонта каждой из трех осей расчетной ортогональной системы координат, связанной с блоком инерциальных измерителей, в трех оставшихся стационарных положениях каждая из трех осей указанной связанной системы координат лежит в плоскости местного горизонта, а две другие находятся под углом 45° к плоскости местного горизонта, восемь одиночных поворотов включают в себя три группы последовательных парных поворотов, для которых номинальные направления соответствующих осей вращения в указанной связанной системе координат являются взаимно ортогональными, при этом в каждой группе парных поворотов присутствуют два поворота с углами, каждый из которых по отдельности и в сумме друг с другом не кратен 360°, на втором этапе оценивают известным скалярным способом погрешности основных характеристик акселерометрических измерителей путем обработки зарегистрированной акселерометрической измерительной информации в стационарных положениях блока инерциальных измерителей с привлечением эталонного значения модуля вектора ускорения свободного падения в месте проведения испытаний, по результатам чего проводят соответствующее уточнение акселерометрической измерительной информации, на третьем этапе для каждой группы парных поворотов определяют направление оси вращения и величины поворотов в связанной системе координат по уточненной на втором этапе акселерометрической измерительной информации в тех стационарных положениях, которые реализованы путем рассматриваемой группы парных поворотов, включая стационарные положения в начале и конце данной группы, с последующим дополнением полученных для каждой группы парных поворотов оценок величин поворотов расчетными составляющими из-за вращения Земли, на четвертом этапе оценивают погрешности основных характеристик гироскопических измерителей путем совместной обработки зарегистрированной гироскопической измерительной информации в стационарных положениях блока инерциальных измерителей с привлечением эталонных значений модуля вектора угловой скорости вращения Земли и географической широты места проведения испытаний и на участках парных поворотов с привлечением определенных на третьем этапе для каждой группы парных поворотов направления оси вращения и величин поворотов.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ОСНОВНЫХ ХАРАКТЕРИСТИК БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ | 2016 |
|
RU2626288C1 |
| СПОСОБ КАЛИБРОВКИ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2009 |
|
RU2406973C2 |
| СПОСОБ КАЛИБРОВКИ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ ПО КАНАЛУ АКСЕЛЕРОМЕТРОВ | 2011 |
|
RU2477864C1 |
| CN 104121927 B, 28.09.2016. | |||

