Изобретение относится к области измерительной техники и приборостроения, а именно к приборам для определения навигационных параметров управляемых подвижных объектов.
Известен аналог «Блок измерения угловой скорости БИУС-040» разработки ОАО НПП «Антарес», Россия [1, 2], который представляет собой четырехосную (с неортогональным расположением осей чувствительности) отказоустойчивую систему измерения проекций абсолютной угловой скорости и линейного ускорения объекта на оси приборной системы координат.
В качестве измерителей линейного ускорения используются чувствительные элементы на основе сухих маятниковых акселерометров, с подвесом на основе кварцевого стекла и датчиком угла емкостного типа.
Система работоспособна при возникновении одного отказа в любой из одноименных подсистем (измерения угловой скорости, линейного ускорения, сервисной электроники) и содержит дублированную сервисную электронику.
Наиболее близким техническим решением к заявленному является «Бесплатформенный измерительный блок КИНД34-059» разработки филиала ФГУП «ЦЭНКИ» «НИИ Прикладной Механики им. академика В.И. Кузнецова» Россия [3], выбранный за прототип.
В состав прототипа входят не имеющие внутреннего резервирования и не связанные между собой восемь измерительных каналов: четыре гироскопических канала (ГК), в которых применен датчик угловой скорости (ДУС) на основе волоконно-оптического гироскопа (ВОГ), и четыре акселерометрических канала (АК); два модуля обмена и управления (МОУ1 и МОУ2) с входящим в каждый из них специальным вычислителем; четыре опорных генератора; четыре вторичных источника питания. В качестве измерителей линейного ускорения используются чувствительные элементы акселерометров маятникового типа, с подвесом на основе кварцевого стекла и емкостным датчиком угла. Все восемь чувствительных элементов (ЧЭ) установлены на общем основании и образуют блок ЧЭ. В состав прибора введены: резервированная система термостатирования и система виброударной защиты (амортизации) блока ЧЭ.
Недостатками прототипа являются совмещение электроники каждой пары чувствительных элементов (ДУСа и акселерометра) и наличие общего источника вторичного питания, что существенно снижает надежность прибора в целом, а также применение системы термостатирования, что ведет к значительному повышению энергопотребления.
Существенным недостатком аналога и прототипа является применение в них элементной базы импортного производства.
Задачей предлагаемого технического решения является повышение надежности и снижение энергопотребления. Кроме того, устройство должно быть выполнено на современной отечественной элементной базе и материалах.
Заявленный технический результат достигается тем, что в бесплатформенный измеритель линейных и угловых скоростей (БИЛУС), содержащий: четыре вторичных источника питания (ВИП), соединенные выходами, соответственно, с входами питания четырех измерителей угловых скоростей (ИУС), четыре измерителя линейных ускорений (ИЛУ) и два электронных вычислителя (ЭВ), согласно изобретению введены два ВИП для ЭВ, при этом выход первого ВИП соединен с входом первого ЭВ, выход второго ВИП соединен с входом второго ЭВ, резервированный силовой коммутатор (СК), выходами соединенный с входами всех ВИП и входами всех ИЛУ, выходы всех ИУС и ИЛУ связаны с соответствующими входами первого и второго ЭВ посредством независимых линий связи.
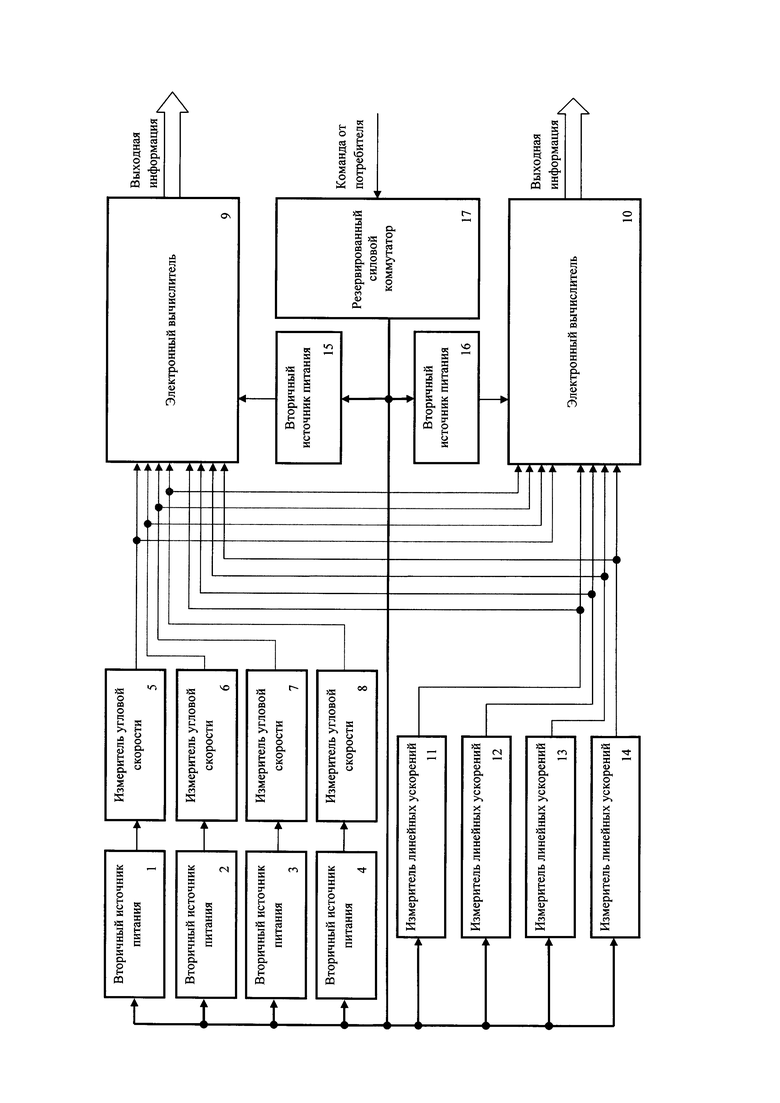
На чертеже приведена структурная схема бесплатформенного измерителя линейных и угловых скоростей.
БИЛУС предназначен для определения навигационных параметров управляемых подвижных объектов, содержит:
1, 2, 3, 4 - вторичные источники питания ИУС;
5, 6, 7, 8 - измерители угловых скоростей;
9, 10 - электронные вычислители;
11, 12, 13, 14 - измерители линейных ускорений;
15, 16 - вторичные источники питания ЭВ;
17 - резервированный силовой коммутатор.
Выходы четырех ИУС соединены с входами первого и второго ЭВ. Выходы четырех ИЛУ соединены, соответственно, с входами первого и второго ЭВ. Выходы резервированного СК соединены, соответственно, с входами ИЛУ и с входами всех ВИП. Выходы четырех ВИП соединены, соответственно, с входами четырех ИУС. Выходы первого и второго ВИП для ЭВ соединены с входом первого ЭВ и входом второго ЭВ соответственно.
Инициализация работы БИЛУС осуществляется подачей на него питания и выдачей в резервированный СК внешней команды от потребителя, которая задает требуемую конфигурацию ИУС и ИЛУ. Резервированный СК подает питание на соответствующие конфигурации ИЛУ и ИУС через ВИП. ИУС и ИЛУ измеряют, соответственно, угловые скорости, линейные ускорения и передают результаты измерений одновременно в первый и второй ЭВ.
В ЭВ осуществляется накапливание и обработка полученной информации. При поступлении в ЭВ команды опроса производится расчет следующей информации:
- о проекциях вектора абсолютной угловой скорости изделия на оси чувствительности ИУС и оси приборной системы координат;
- о приращениях интегралов проекций вектора абсолютной угловой скорости изделия на оси чувствительности ВОГ и оси приборной системы координат;
- о проекциях вектора линейного ускорения в месте установки на оси чувствительности акселерометров и оси приборной системы координат;
- о приращениях интегралов проекций вектора линейного ускорения в месте установки на оси чувствительности акселерометров и оси приборной системы координат;
- о составляющих кватерниона приращения углового положения с момента включения;
- о моментах времени, на которые сформирована информация.
При этом каждый измеритель осуществляет передачу значений величины собственной частоты параллельно в каждый ЭВ, которые обрабатывают полученную информацию и выдают конечный результат потребителю.
В БИЛУС используется ИЛУ, состоящий из ЧЭ акселерометра и его электронного преобразователя акселерометра.
Таким образом, заявлен бесплатформенный измеритель линейных и угловых скоростей, содержащий: четыре ВИП, соединенные выходами, соответственно, с входами питания четырех ИУС, четыре ИЛУ и два ЭВ. Отличительная особенность устройства заключается в том, что введены два ВИП для ЭВ, при этом выход первого ВИП соединен с входом первого ЭВ, выход второго ВИП соединен с входом второго ЭВ, резервированный СК, выходами соединенный с входами всех ВИП и входами всех ИЛУ, выходы всех ИУС и ИЛУ связаны с соответствующими входами первого и второго ЭВ посредством независимых линий связи.
Техническим результатом является повышение надежности и уменьшение энергопотребления.
Источники информации
1. www.npp-antares.ru/equipment.html.
2. Волоконно-оптический гироскоп космического применения. Опыт разработки, производства и эксплуатации // Доклады XX Санкт-Петербургской международной конференции по интегрированным навигационным системам, Санкт-Петербург, Россия, 27-29 мая, 2013.
3. В.М. Кутовой, О.И. Маслова, С.Ю. Перепелкина, М.А. Чапцова, М.В. Антонова, А.А. Игнатьев, Е.Ю. Ковалева, A.M. Курбатов, Л.З. Новиков. Исследование характеристик бесплатформенного инерциального блока на базе волоконно-оптических гироскопов в процессе наземной отработки. // Сборник материалов ХVIII Санкт-Петербургской международной конференции по интегрированным навигационным системам, СПб, ОАО «Концерн «ЦНИИ «Электроприбор», 2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| РЕЗЕРВИРОВАННЫЙ АМОРТИЗИРОВАННЫЙ БЛОК ДАТЧИКОВ МАЛОГАБАРИТНОЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2021 |
|
RU2778428C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ ОТБОРА ДОСТОВЕРНОЙ ИНФОРМАЦИИ И ИДЕНТИФИКАЦИИ ОТКАЗОВ АКСЕЛЕРОМЕТРОВ И ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ ПРИ ШЕСТИ ИЗМЕРИТЕЛЯХ В КАЖДОМ ТРАКТЕ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2573442C1 |
| ПОДВИЖНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2572094C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе | 2022 |
|
RU2794283C1 |
| СПОСОБ ОТБОРА ДОСТОВЕРНОЙ ИНФОРМАЦИИ И ИДЕНТИФИКАЦИИ ОТКАЗОВ АКСЕЛЕРОМЕТРОВ И ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ ПРИ ПЯТИ ИЗМЕРИТЕЛЯХ В КАЖДОМ ТРАКТЕ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2568191C1 |
Изобретение относится к области измерительной техники и приборостроения, а именно к приборам для определения навигационных параметров управляемых подвижных объектов. Технический результат – повышение надежности. Для этого бесплатформенный измеритель линейных и угловых скоростей содержит: четыре вторичных источника питания (ВИЛ), соединенные выходами, соответственно, с входами питания четырех измерителей угловых скоростей (ИУС), четыре измерителя линейных ускорений (ИЛУ) и два электронных вычислителя (ЭВ), согласно изобретению введены два ВИЛ для ЭВ, при этом выход первого ВИЛ соединен с входом первого ЭВ, выход второго ВИЛ соединен с входом второго ЭВ, резервированный силовой коммутатор, выходами соединенный с входами всех ВИЛ и входами всех ИЛУ, выходы всех ИУС и ИЛУ связаны с соответствующими входами первого и второго ЭВ посредством независимых линий связи. 1 ил.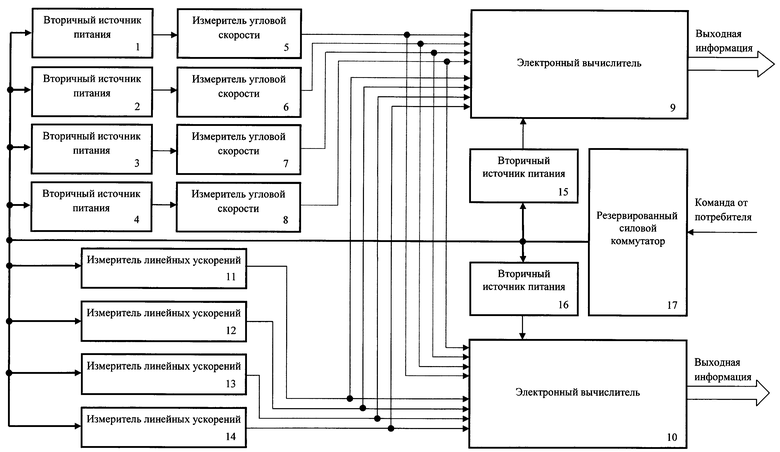
Бесплатформенный измеритель линейных и угловых скоростей, содержащий: четыре вторичных источника питания (ВИП), соединенные выходами, соответственно, с входами питания четырех измерителей угловых скоростей (ИУС), четыре измерителя линейных ускорений (ИЛУ) и два электронных вычислителя (ЭВ), отличающийся тем, что введены два ВИП для ЭВ, при этом выход первого ВИП соединен с входом первого ЭВ, выход второго ВИП соединен с входом второго ЭВ, резервированный силовой коммутатор, выходами соединенный с входами всех ВИП и входами всех ИЛУ, выходы всех ИУС и ИЛУ связаны с соответствующими входами первого и второго ЭВ посредством независимых линий связи.
| Кутовой В.М | |||
| и др | |||
| Исследование характеристик бесплатформенного инерциального блока на базе волоконно-оптических гироскопов в процессе наземной отработки | |||
| // Сборник материалов ХVIII Санкт-Петербургской международной конференции по интегрированным навигационным системам, СПб, ОАО "Концерн "ЦНИИ "Электроприбор", 2011 | |||
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2215668C1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ АППАРАТУРЫ ПОДВИЖНОГО КОМПЛЕКСА ТОПОПРИВЯЗКИ | 2010 |
|
RU2435280C1 |
| СПОСОБ УСТАНОВКИ ПЛАСТЫРЯ В ОБСАДНОЙ КОЛОННЕ ТРУБ | 2007 |
|
RU2342515C1 |

