Изобретение относится к гидроакустике, технической акустике и может быть использовано при определении влияния помехи на характеристики обнаружения гидроакустических систем.
Отношение сигнал/помеха является одним из основных параметров, определяющих помехоустойчивость систем обнаружения и их основные характеристик, таких как вероятность правильного обнаружения и вероятность ложной тревоги. Поэтому возникает необходимость в определении этой величины при работе в реальных условиях при конкретной помехосигнальной ситуации (А.М.Тюрин. Введение в теорию статистических методов в гидроакустике. Л., 1963 г., изд. ВМОЛА, стр.116).
Известен метод измерения отношения сигнал/помеха, который используется в системах проверки для определения работоспособности систем обнаружения сигналов шумоизлучения в лабораторных условиях.
Способ содержит измерение энергии подаваемого на вход системы сигнала, отключение сигнала и измерение энергии подаваемой помехи на вход системы без сигнала, одновременную подачу на вход системы известного сигнала и известной помехи и определение интересующего параметра на выходе системы после обработки суммарного процесса. Недостатком этого способа является необходимость последовательного измерения энергии сигнала и энергии помехи, что в реальных условиях практически невозможно.
Известен способ измерения отношения сигнал/помеха, который содержит прием смеси сигнала шумоизлучения и помехи двумя идентичными приемниками, расстояние между которыми превышает интервал корреляции помехи, определение суммы сигналов, принятых двумя приемниками, определение разности сигналов, принятых двумя приемниками (А.М.Тюрин. Введение в теорию статистических методов в гидроакустике. Л., 1963 г., изд. ВМОЛА, стр.172).
Предполагается, что помехи, действующие на приемники, статистически независимы, тогда разность сигналов, принятых двумя приемниками, будет определять помеху. Сумма сигналов, принятых двумя приемниками, будет определять сумму сигнал + помеха. Разность суммы сигналов + помехи и разности сигналов будет определять сигнал, а отношения сигнал/помеха будет определяться как частное от деления разности суммы сигналов + помехи и разности сигналов, принятых двумя приемниками, на разность этих сигналов.
Недостатком этого способа является необходимость наличия двух идентичных каналов обработки сигналов, принятых в канале суммы и в канале разности, что в реальных условиях вызывает значительные трудности, поскольку со временем за счет старения характеристики элементов изменяются и каналы становятся неидентичными. Кроме того, необходимо иметь два канала обработки, приемники которых разнесены на интервал, превышающий интервал корреляции помехи, что не всегда возможно.
Задачей изобретения является устранение указанных недостатков, а техническим результатом способа является упрощение аппаратуры, реализующей способ и обеспечение универсальности способа.
Указанный недостаток устраняется тем, что в известный способ измерения, содержащий прием сигнала шумоизлучения и помехи, введены новые признаки, а именно: дополнительно определяют спектр принятой смеси сигнала шумоизлучения и помехи, определяют вторичный спектр смеси сигнала шумоизлучения и помехи или автокорреляционную функцию (АКФ), определяют точку перегиба АКФ, определяют S1 как сумму отсчетов АКФ от нулевого отсчета до отсчета в точке перегиба, определяют S3 как сумму отсчетов АКФ от отсчета точки перегиба до отсчета окончания АКФ, определяют S2 как произведение значения АКФ в точке перегиба на число отсчетов от нулевого отсчета до точки перегиба, а отношение сигнал/помеха определяют по формуле 
где S1 - площадь автокорреляционной функции помехи и сигнала до точки перегиба;
S2 - площадь автокорреляционной функции сигнала до точки перегиба;
S3 - площадь автокорреляционной функции сигнала после точки перегиба.
Известно, что спектр нормального стационарного процесса определяется следующим образом (A.M.Заездный. Основы расчетов по статистической радиотехнике. Связь, М., 1969 г., стр 88, стр.91).
где Х(ω) - спектр временной реализации x(t).
Если на момент приема эхо-сигнала на входе приемного устройства будет действовать помеха X(t) и сигнал У(Т), то может считать, что на входе антенны действует суммарный сигнал Z(t)=X(t)+Y(t), где X(t) и Y(t) - два независимых друг от друга процесса, поскольку они принимаются от разных источников и имеют различные частотные полосы.
Пусть вычисляется спектр суммы процессов с помощью преобразования Фурье:

Можно определить АКФ поступающего сигнала как обратное преобразование Фурье от энергетического спектра
С учетом полосы сигнала шумоизлучения АКФ можно записать следующим образом.

где ωн - нижняя граница полосы сигнала,
ωв - верхняя граница полосы сигнала.
Полагая, что спектр сигнала равномерно распределен в рабочей полосе частот, нули АКФ определяются по формулам:


где n=0, 1, 2, 3.
Получим точки пересечения огибающей АКФ с нулем:
 ,
,
 ,
,
Из приведенных формул видно, что АКФ содержит несущую частоту, равную полусумме верхней и нижней частот, и огибающую АКФ, равную их полуразности. Ширина основного максимума функции автокорреляции зависит от ширины полосы сигнала, принимаемого антенной. В случае сигнала она будет определяться шириной полосы сигнала, а в случае помехи будет определяться шириной полосы помехи, действующей на входе, которая существенно шире, чем полоса принимаемого сигнала. В этом случае АКФ суммарного процесса будет равна сумме АКФ составляющих (A.M.Заездный. Основы расчетов по статистической радиотехнике. Связь, М, 1969 г., стр 88, стр.91) и иметь вид:

где Вх(τ) и Вy(τ) - АКФ процессов X(t) и У(t),
Вху(τ) и Вух(τ) - ВКФ (взаимно-корреляционная функция) тех же процессов. Так как X(t) и Y(t) процессы независимые, то ВКФ равны нулю и АКФ суммы независимых случайных процессов равна сумме автокорреляционных функций слагаемых.
ВZ(τ)=Вх(τ)+Вy(τ).
Поскольку ширина спектров помехи и спектра сигнала шумоизлучения различна, то и нули АКФ будут различными для Вх(τ) и Ву(τ).
Соответственно, Вх(τ) будет иметь первый ноль (точка касания), определяемый полосой помехи Δωx, Ву(τ) будет иметь точку касания, определяемую полосой сигнала шумоизлучения Δωу.
При суммировании двух и более АКФ произойдет искажение исходной огибающей АКФ. Сначала наблюдается убывание огибающей АКФ, имеющей широкий спектр, до точки перегиба, соответствующей первому нулю огибающей функции для полосы ΔωX, после которой кривая перейдет к другой огибающей функции для полосы ΔωY, принадлежащей цели с более узким спектром, таким образом, монотонность огибающей корреляционной функции исказится. Поэтому необходимо найти точку перегиба суммарной автокорреляционной функции (Патент на изобретение №2110810 от 26.07.1995 на «Способ обнаружения шумящих объектов»). Сигналы от различных источников, в частности сигнал входной помехи, который имеет полосу, равную полосе приемного тракта, и сигнал от источника шумоизлучения, полоса которого зависит от дальности до объекта шумоизлучения или от других факторов, будут иметь различные автокорреляционные функции, которые будут фиксироваться одновременно на выходе системы обработки.
Известно, что автокорреляционная функция стационарного случайного процесса является четной функцией времени и имеет максимум равной дисперсии процесса или мощности и, как правило, убывает со временем до нуля (В.И.Тихонов. Статистическая радиотехника. Сов. радио, М., 1966 г., стр 77). Автокорреляционная функция может определяться как аналоговыми методами (там же, стр 84), так и с использованием цифровых методов обработки с помощью спецпроцессоров на основе быстрого преобразования Фурье БПФ.
На фиг.1 представлена АКФ сигнала и АКФ входного шума, на фоне которого производится обработка входного сигнала. В соответствии с патентом на изобретение №2110810 от 26.07.1995 г. можно определить точку перегиба автокорреляционной функции и определить АКФ входной помехи и АКФ входного сигнала шумоизлучения. Относительно точки перегиба АКФ определяется площадь S1 как сумма отсчетов АКФ от нулевого отсчета до отсчета точки перегиба, которая принадлежит помехе и сигналу, и площадь S3, которая принадлежит части входного сигнала, как сумму отсчетов АКФ после отсчета точки перегиба до отсчета окончания АКФ. Определяют площадь S2, которая принадлежит и помехе, и сигналу, как произведение значения АКФ в отсчете точки перегиба на число отсчетов от нулевого отсчета до отсчета точки перегиба.
Отношение сигнал помехи определяется выражением
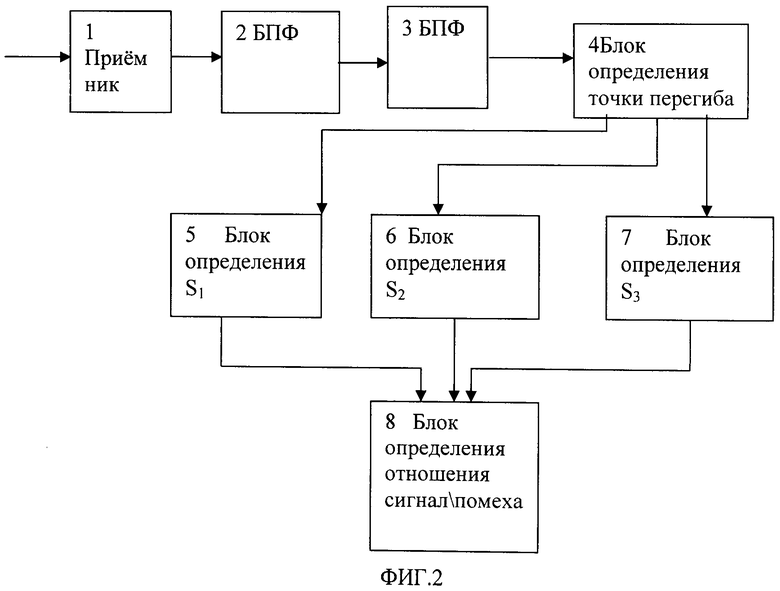
Сущность изобретения поясняется фиг.1 и фиг.2, где на фиг.1 представлена АКФ смеси сигнала и помехи, на фиг.2 - блок-схема устройства, реализующего указанный способ.
Устройство содержит приемное устройство 1, выход которого соединен через блок 2 спектроанализатора БПФ и блок 3 спектроанализатора БПФ со входом блока 4 определения точки перегиба, и далее через блок 5 измерения первой площади АКФ S1 поступает на первый вход блока 8 определения отношения сигнал/помеха. Второй выход блока 4 соединен через блок 6 измерения второй площади АКФ S2 со вторым входом блока 8. Третий выход блока 4 соединен через блок 7 измерения третьей площади АКФ S3 с третьим входом блока 8.
Способ измерения отношения сигнал/помеха целесообразно рассмотреть совместно с работой реализующего его устройства. На вход приемного устройства 1 поступает временная реализация, содержащая помеху, действующую на входе, и сигнал шумоизлучения цели. В приемном устройстве происходит прием, усиление и преобразование принятой реализации в цифровую форму и передача на вход спектранализатора БПФ 2, на выходе которого формируется комплексный спектр суммарного процесса. Этот спектр поступает на вход второго спектранализатора БПФ 3, на выходе которого формируется вторичный спектр или автокорреляционная функция входного процесса. Суммарная автокорреляционная функция поступает на вход блока определения точки перегиба 4. Этот блок является известным устройством и может быть выполнен в соответствии с патентом на изобретение №2110810 от 26.07.1995 «Способ обнаружения шумящих объектов». Выделенная автокорреляционная функция и координаты точки перегиба в цифровом виде поступают в блок 5 измерения площади S1, в блок 6 измерения площади S2, в блок 7 измерения площади S3. Блоки измерения площадей являются известными устройствами и могут быть реализованы как сумматоры отсчетов, определенных в указанных пределах по типу цифрового регистратор 7502 (Справочник по гидроакустике. Л., Судостроение, 1988 г., стр.408) или реализованы на любом компьютере с использованием стандартных программ. Измеренные значения площадей поступают в блок определения отношения сигнал/помеха, в котором производятся элементарные арифметические операции.
Таким образом, используя корреляционные свойства помехи и сигнала, определяя количественные значения мощности помехи и мощности сигнала по разделенной суммарной автокорреляционной функции, решается поставленная задача определения отношения сигнал/помеха на входе приемного устройства и тем самым достигается поставленный технический результат. Универсальность способа заключается в том, что и сигнал, и помеха проходят через один и тот же канал обработки и нет необходимости двух каналов, и нет необходимости обеспечения идентичности каналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКОГО СИГНАЛА ШУМОИЗЛУЧЕНИЯ ОБЪЕКТА | 2014 |
|
RU2555194C1 |
| СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2559310C2 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2014 |
|
RU2570430C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА ПО ЕГО ШУМОИЗЛУЧЕНИЮ | 2015 |
|
RU2593622C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА | 2001 |
|
RU2191405C1 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
Изобретение относится к области гидроакустики и производит определение отношения сигнал/помеха при одновременном присутствии и сигнала, и помехи на входе приемного устройства. Для этого осуществляют прием сигнала шумоизлучения и помехи, определяют спектр принятой смеси сигнала шумоизлучения и помехи, определяют вторичный спектр смеси сигнала шумоизлучения и помехи или автокорреляционную функцию (АКФ), определяют точку перегиба АКФ, определяют S1 как сумму отсчетов АКФ от нулевого отсчета до отсчета в точке перегиба, определяют S3 как сумму отсчетов АКФ от отсчета точки перегиба до отсчета окончания АКФ, определяют S2 как произведение значения АКФ в точке перегиба на число отсчетов от нулевого отсчета до точки перегиба, а отношение сигнал/помеха определяют по формуле  . Техническим результатом изобретения является обеспечение универсальности способа и упрощение аппаратуры, позволяющей определять отношение сигнал/шум. 2 ил.
. Техническим результатом изобретения является обеспечение универсальности способа и упрощение аппаратуры, позволяющей определять отношение сигнал/шум. 2 ил.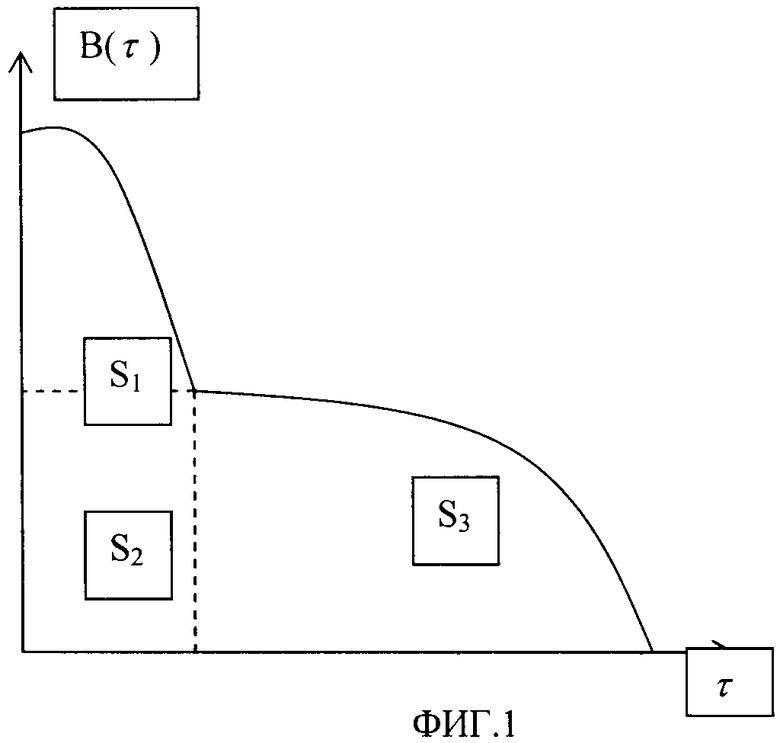
Способ измерения отношения сигнал-помеха, содержащий прием сигнала шумоизлучения и помехи, отличающийся тем, что дополнительно определяют спектр принятой смеси сигнала шумоизлучения и помехи, определяют вторичный спектр смеси сигнала шумоизлучения и помехи или автокорреляционную функцию (АКФ), определяют точку перегиба АКФ, определяют площадь автокорреляционной функции помехи и сигнала до точки перегиба S1 как сумму отсчетов АКФ от нулевого отсчета до отсчета в точке перегиба, определяют площадь автокорреляционной функции сигнала после точки перегиба S3 как сумму отсчетов АКФ от отсчета точки перегиба до отсчета окончания АКФ, определяют площадь автокорреляционной функции сигнала до точки перегиба S2 как произведение значения АКФ в точке перегиба на число отсчетов от нулевого отсчета до точки перегиба, а отношение сигнал-помеха определяют по формуле .
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКОГО СПЕКТРА ШУМОВОГО ЭЛЕКТРИЧЕСКОГО СИГНАЛА | 2005 |
|
RU2292558C1 |
| СПОСОБ ПОИСКА СЛОЖНЫХ СИГНАЛОВ | 2009 |
|
RU2413236C1 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| Устройство для измерения отношения"СигНАл-шуМ | 1979 |
|
SU808996A1 |
| JP 4015575 A, 20.01.1992 | |||
| US 6487174 B1, 26.11.2002 | |||
| CN 101499860 A, 05.08.2009. | |||

