Изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения, классификации и определения координат морских объектов.
Известны гидроакустические рубежные системы, предназначенные для обнаружения морских объектов-нарушителей, входящих в охраняемый район [1-3]. В качестве таких систем, как правило, применяются шумопеленгаторные станции (ШПС) с установленными на дне низкочастотными линейными протяжёнными антеннами, состоящими из гидроакустических приёмников, расположенных друг от друга на расстоянии в единицы - десятки метров [1].
Основной задачей таких ШПС является выделение объектов-нарушителей из потока объектов, пересекающих рубеж. Как правило, нарушителями назначаются подводные объекты (подводные лодки, обитаемые и необитаемые подводные аппараты).
Обнаружение объектов, пересекающих рубеж, трудностей, как правило, не вызывает. Сложнее обстоит с их классификацией. Для классификации объектов на классы "подводный" - "надводный" используются классификационные признаки, основанные на отличиях подводных и надводных объектов в их шумности и форме спектров несущей и амплитудной огибающей [4-12]. Однако проблема состоит в том, что подводный объект - нарушитель может эффективно подстраивать свой шумовой портрет под шумовой портрет надводного корабля. Данная технология хорошо отработана. В частности, подводные лодки ВМС США оборудованы системой GNATS, позволяющей маскировать свой шум под шум надводного корабля.
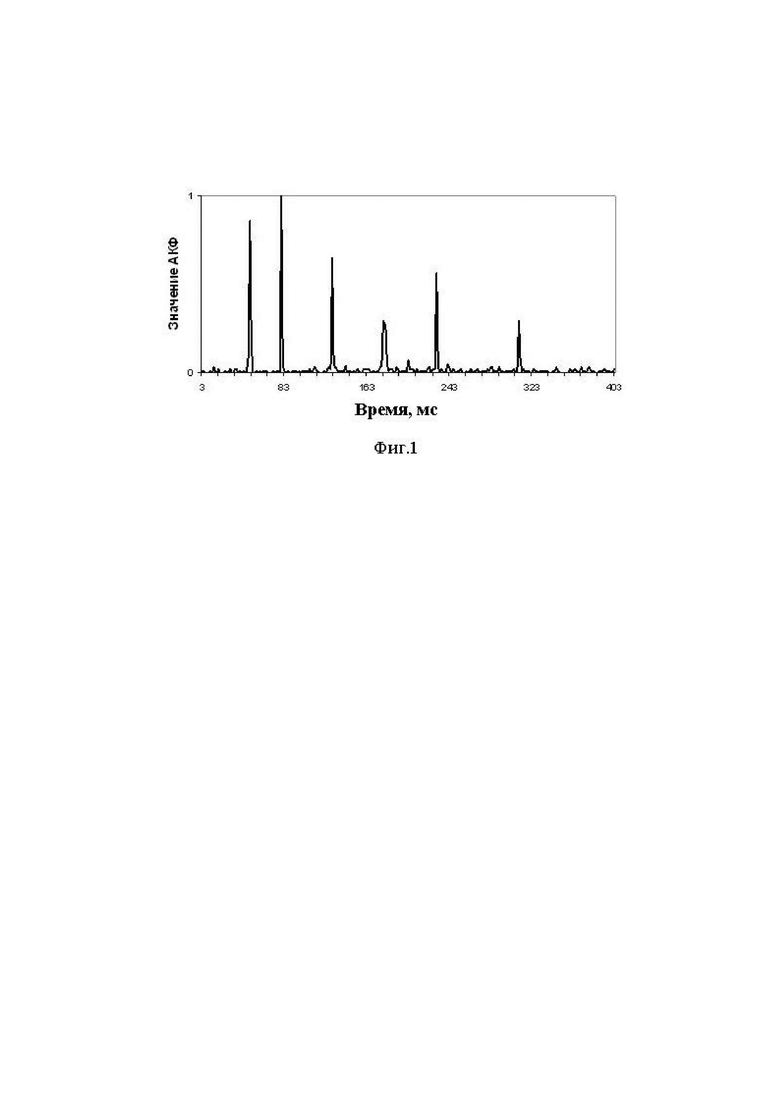
Ввиду этого практический интерес представляет разработка альтернативных способов классификации подводных нарушителей. Наиболее эффективно осуществлять классификацию на классы "подводный объект"-"надводный объект" путём определения глубины обнаруженного объекта. Для этого можно использовать известные способы определения координат источника звука, основанные на многолучевом распространении сигнала источника в океаническом волноводе. Эти способы состоят в обнаружении узкополосных интерференционных максимумов (ИМ) в автокорреляционной функции (АКФ) широкополосного шума источника (фиг. 1), обусловленных интерференцией сигнала источника, пришедших на приёмную антенну по разным акустическим лучам, и измерении абсцисс этих ИМ, равных относительному запаздыванию прихода сигнала по интерферирующим лучам, и решении системы уравнений, связывающих координаты источника с величиной относительного запаздывания акустических лучей, образующих каждый ИМ [13-23].
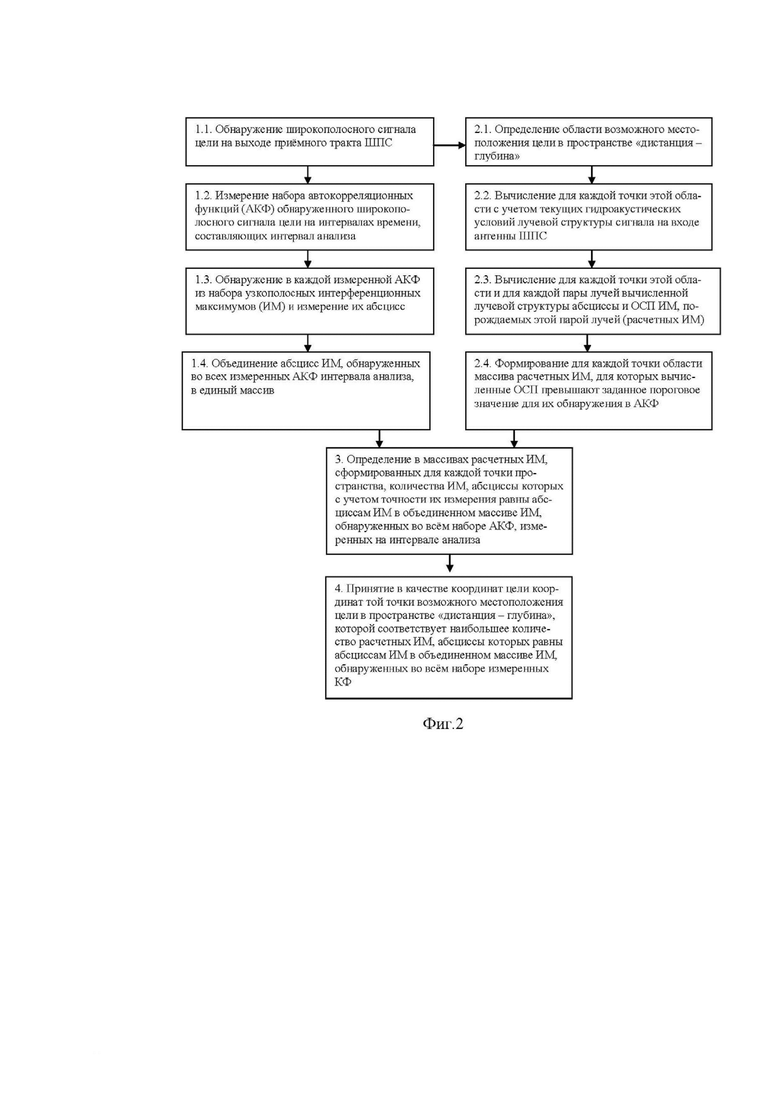
В качестве способа-прототипа выберем изобретение [20]. На фиг. 2 приведена его блок-схема. Обработка информации, поступающей от приёмного тракта ШПС, ведется по двум параллельным ветвям. Первая (левая) ветвь включает в себя последовательно выполняемые операции обнаружения широкополосного сигнала цели на выходе антенны (блок 1.1); измерения набора АКФ обнаруженного широкополосного сигнала цели на интервалах времени, составляющих интервал анализа (блок 1.2); обнаружения в каждой измеренной АКФ узкополосных ИМ и измерения их абсцисс (блок 1.3); объединения абсцисс ИМ, обнаруженных во всех измеренных АКФ интервала анализа, в единый массив (блок 1.4). Выполнение перечисленных операций обеспечивает формирование массива всех ИМ, измеренных на интервале анализа и готовых к сопоставлению с расчетными данными, формируемыми блоками второй ветви.
Вторая ветвь (правая) включает в себя операции определения области возможного местоположения цели в пространстве «дистанция - глубина» (блок 2.1); вычисления для каждой точки этой области с учетом текущих гидроакустических условий лучевой структуры сигнала на входе антенны ШПС, (блок 2.2); вычисления для каждой точки этой области и для каждой пары лучей вычисленной лучевой структуры значений абсциссы и отношения сигнал/помеха (ОСП) ИМ, порождаемых этой парой лучей (расчетных ИМ) (блок 2.3) и операцию формирования для каждой точки области массива расчетных ИМ, для которых вычисленные ОСП превышают заданное пороговое значение для их обнаружения в АКФ (блок 2.4). Операции второй ветви могут быть выполнены однократно для текущего состояния гидрологических условий, определяющего лучевую структуру сигналов на входе антенны. Выполнение операций второй ветви обеспечивает формирование массива расчетных данных, готовых к сопоставлению с результатами измерений, сформированными первой ветвью.
Сопоставление выполняется последовательно расположенными блоками 3 и 4, выполняющими операции определения в массивах расчетных ИМ, сформированных для каждой точки пространства, количества ИМ, абсциссы которых с учетом точности их измерения равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всём наборе АКФ, измеренных на интервале анализа (блок 3) и, наконец, операцию определения координат цели путем выбора координат той точки возможного местоположения цели в пространстве «дистанция - глубина», которой соответствует наибольшее количество расчетных ИМ, абсциссы которых равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всём наборе измеренных АКФ (блок 4).
Недостатком способа-прототипа, с одной стороны, является возможность появления аномально больших ошибок определения координат цели вследствие произвольного выбора области в пространстве «дистанция - глубина», в котором определяются координаты цели, а с другой стороны, - многозначностью результата определения координат источника.
Однако применительно к рассматриваемой задаче ввиду ограниченной дистанции до объекта и распространения сигнала от объекта к ШПС практически по вертикальной траектории, при которой вертикальное распределение скорости звука в районе не влияет на траектории лучей, данные недостатки не будут иметь решающего значения.
Решаемая техническая проблема - повышение эффективности обнаружения объекта-нарушителя.
Достигаемый технический результат - классификация подводного объекта-нарушителя в условиях искусственного искажения им характеристик своего шумоизлучения путём определения его глубины.
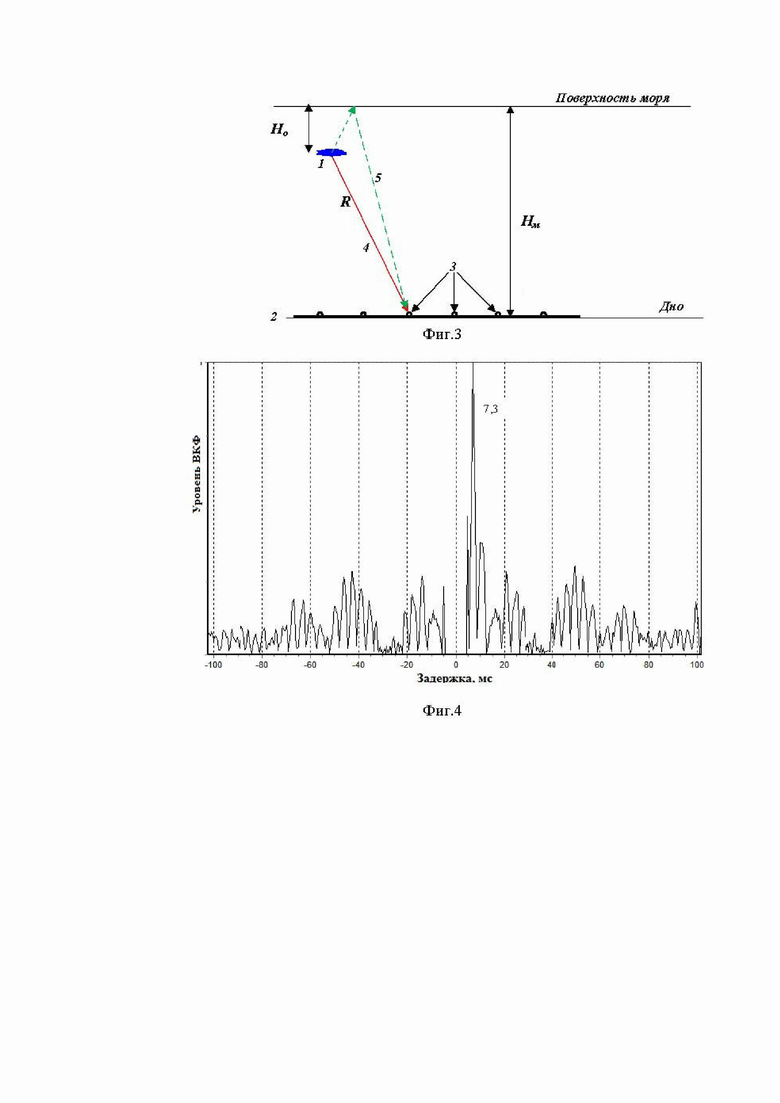
Обоснуем заявляемый способ с использованием иллюстрации на фиг. 3, на которой обозначены:
1 - объект-нарушитель;
2 - линейная антенна ШПС (далее-антенна ШПС);
3 - гидроакустические приёмники (ГАП) антенны ШПС, расположенные на одинаковом расстоянии друг от друга;
4 - прямой акустический луч, по которому шум объекта-нарушителя распространяется до антенны ШПС;
5 - акустический луч, однократно отразившийся от поверхности моря;
 - глубина моря;
- глубина моря;
 - глубина объекта-нарушителя (далее - объект);
- глубина объекта-нарушителя (далее - объект);
 - наклонное (кратчайшее) расстояние между объектом и ГАП с номером
- наклонное (кратчайшее) расстояние между объектом и ГАП с номером  , на котором шум объекта имеет максимальный уровень.
, на котором шум объекта имеет максимальный уровень.
На вход каждого ГАП антенны ШПС приходит несколько акустических лучей, по которым распространяется шум объекта. Из них выделяются 2 луча:
- прямой луч (линия красного цвета);
- луч, однократно отразившийся от поверхности моря (линия зелёного цвета).
От остальных лучей их отличает то, что ввиду минимального количества отражений от границ волновода они имеют наибольшую интенсивность, а следовательно соответствующий им ИМ в АКФ имеет наибольший уровень.
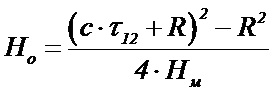
Относительное запаздывание прихода на ГАП этих лучей равно:

где  - скорость звука в воде.
- скорость звука в воде.
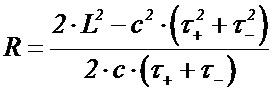
Поскольку глубина моря в районе установки ШПС известна, а относительное запаздывание  между лучами равно абсциссе наибольшего по уровню максимума в АКФ, для определения глубины объекта необходимо найти наклонное расстояние . Для этого воспользуемся разностно-дальномерным методом [24], основанным на измерении задержек прихода сигнала на 3 приёмника.
между лучами равно абсциссе наибольшего по уровню максимума в АКФ, для определения глубины объекта необходимо найти наклонное расстояние . Для этого воспользуемся разностно-дальномерным методом [24], основанным на измерении задержек прихода сигнала на 3 приёмника.
В качестве трёх приёмников выберем ГАП с номером , на котором шум объекта (уровень сигнала обнаруженного морского объекта) имеет максимальный уровень, и 2 соседних ГАП -1 и +1 (на фиг. 3 не обозначены). Измерив путём вычисления взаимно-корреляционной функции (ВКФ) шумов на выходе -го и -1-го ГАП, а также ВКФ шумов на выходе -го и +1-го ГАП, и найдя в этих ВКФ наибольшие по амплитуде максимумы, вычислим наклонное расстояние R между объектом и ГАП с номером :

где
 - задержка между сигналами цели на выходе ГАП с номерами
- задержка между сигналами цели на выходе ГАП с номерами  и
и  , равная абсциссе наибольшего по амплитуде максимумы в ВКФ шумов на выходе -го и -1-го ГАП;
, равная абсциссе наибольшего по амплитуде максимумы в ВКФ шумов на выходе -го и -1-го ГАП;
 - задержка между сигналами цели на выходе ГАП с номерами и
- задержка между сигналами цели на выходе ГАП с номерами и  , равная абсциссе наибольшего по амплитуде максимумы в ВКФ шумов на выходе -го и +1-го ГАП;
, равная абсциссе наибольшего по амплитуде максимумы в ВКФ шумов на выходе -го и +1-го ГАП;
 - расстояние между соседними ГАП в антенне.
- расстояние между соседними ГАП в антенне.
Вычислив по формуле (2) наклонное расстояние между источником и ГАП с номером , из формулы (1) получим:

Реализация заявляемого способа состоит в следующем:
1) Одним из известных способов осуществляется обнаружение объекта на выходе антенны ШПС и определяется номер ГАП , на котором уровень сигнала объекта имеет максимальный уровень.
2) Выполняется вычисление ВКФ шумов на выходе ГАП с номерами и -1, а также ВКФ шумов на выходе ГАП с номерами и +1. В вычисленных ВКФ осуществляется обнаружение наибольших по амплитуде максимумов и измерение их абсцисс и соответственно.
3) По формуле (2) вычисляется наклонная дистанция до объекта.
4) Вычисляется АКФ шума на выходе ГАП с номером . Выполняется обнаружение в вычисленной АКФ наибольшего по амплитуде максимума с абсциссой  .
.
5) По формуле (3) вычисляется глубина обнаруженного объекта  .
.
6) Если вычисленная глубина превышает максимальную глубину погружения надводного объекта  (=7…10 м), обнаруженный объект считается подводным, в противном случае - надводным.
(=7…10 м), обнаруженный объект считается подводным, в противном случае - надводным.
Предложенный способ работоспособен, если возможно выделение ИМ в АКФ и ВКФ и возможно измерение их абсцисс с приемлемой точностью. Эти условия выполняются, если выполняется условие [25]:

где
 - ширина полосы частот, в которой вычисляются ВКФ и АКФ;
- ширина полосы частот, в которой вычисляются ВКФ и АКФ;
 - отношение сигнал/помеха (по мощности) в этой полосе частот.
- отношение сигнал/помеха (по мощности) в этой полосе частот.
Для оценки точности определения координат и параметров движения цели было проведено математическое моделирование для следующих условий:
- глубина моря 300 м;
- скорость звука 1500 м/с;
- глубина объекта 200 м;
- наклонное расстояние между объектом и ближайшим ГАП 150 м;
- объект пересекает антенну под углом 30° (т.е. угол с вершиной в месте ГАП с номером между линией антенны и направлением на объект 30°);
- расстояние между ГАП в антенне 20 м;
- ширина полосы частот, в которой вычисляются ВКФ и АКФ 1000 Гц;
- отношение сигнал/помеха (по мощности) в этой полосе частот 10.
В соответствии с этими данными:
- задержка прихода сигнала объекта на ГАП с номерами и -1;
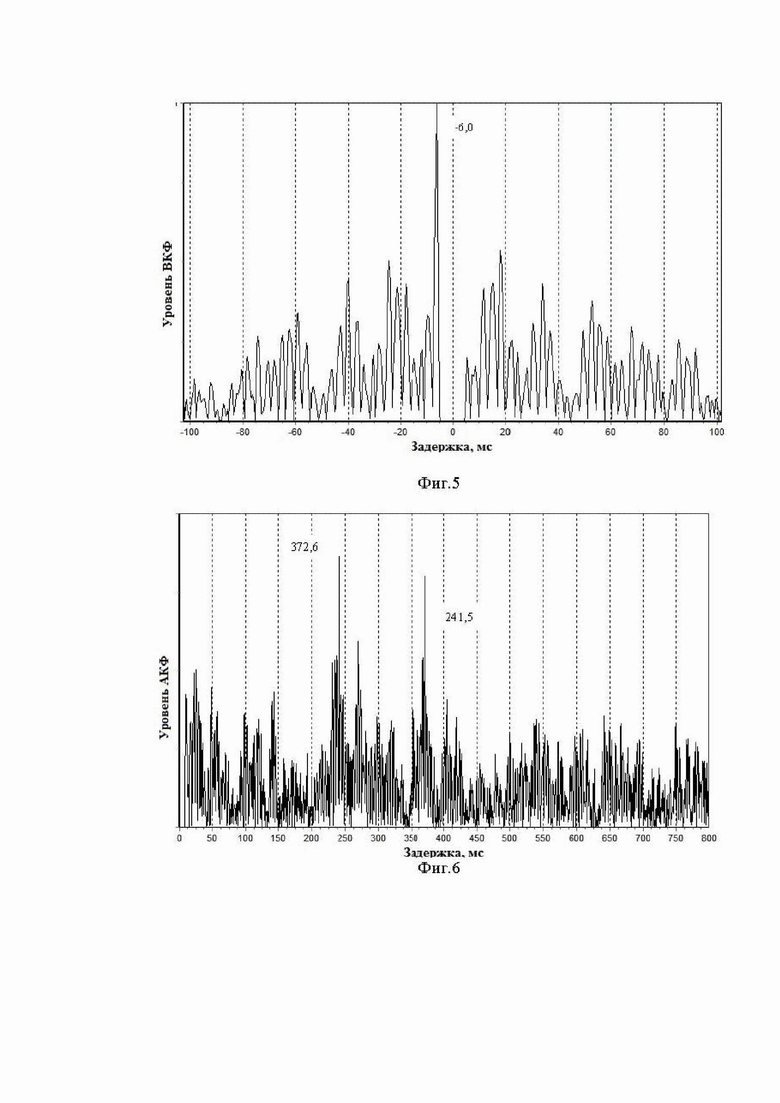
- =7,3 мс. Соответствующая ВКФ приведена на фиг. 4;
- задержка прихода сигнала объекта на ГАП с номерами и +1;
-  =-6,0 мс. Соответствующая ВКФ приведена на фиг. 5. По оси абсцисс на фиг. 4 и 5 отложена задержка между сигналами, по оси ординат - уровень ВКФ.
=-6,0 мс. Соответствующая ВКФ приведена на фиг. 5. По оси абсцисс на фиг. 4 и 5 отложена задержка между сигналами, по оси ординат - уровень ВКФ.
Подставляя эти задержки в формулу (2) (при  =20 м и
=20 м и  =1500 м/с), получим
=1500 м/с), получим  =150,3 м.
=150,3 м.
На ГАП приходит три сигнальных луча:
- прямой луч со временем распространения сигнала по нему от объекта до ГАП 100,0 мс;
- луч, однократно отразившийся от поверхности со временем распространения сигнала по нему 341,5 мс;
- луч, однократно отразившийся от дна и поверхности со временем распространения сигнала по нему 472,6 мс.
В результате в АКФ шума на выходе ГАП могут наблюдаться 3 ИМ с задержками 341,5-100,0=241,5 мс, 472,6-100,0=372,6 мс, 472,6-341,5=131,1 мс.
Смоделированная для рассматриваемых условий АКФ шума на выходе ГАП приведена на фиг. 6, в которой обнаруживаются два ИМ - с задержками 241,5 мс и 372,6 мс. Третий максимум с задержкой в 131,1 мс ввиду малой энергии 2-го и 3-го интерферирующих лучей не превысил уровня фона АКФ. По оси абсцисс на фиг. 6 отложена задержка между сигналами, по оси ординат - уровень АКФ.
С использованием задержки наибольшего максимума, образованного интерференцией прямого луча и луча, однократно отразившегося от поверхности, по формуле (3) получим  =200,2 м, что соответствует исходным данным.
=200,2 м, что соответствует исходным данным.
Заметим, что в ВКФ и АКФ на фиг. 4-6 для наглядности искусственно исключены не несущие информации максимумы с нулевой задержкой и большой амплитудой.
Поскольку глубина объекта-нарушителя является классификационным признаком, не поддающимся искажению, приведённое обоснование и результаты моделирования заявляемого способа позволяют утверждать, что технический результат - классификация подводного объекта-нарушителя в условиях искусственного искажения им характеристик своего шумоизлучения путём определения его глубины - можно считать достигнутым.
Источники информации:
1. ГАК МГК-608Э. Официальный сайт АО "НИИ "Атолл".
2. SOSUS (Sound surveillance system). Википедия.
3. IUSS (Integrated undersea surveillance system). Википедия.
4. Телятников В.И. Методы и устройства классификации гидроакустических сигналов // Зарубежная радиоэлектроника, 1979, №9, с. 19-38.
5. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы// СПб.: Наука, 2004.
6. Справочник по гидроакустике. Л., Судостроение, 1988.
7. Lourence J.G. Classification of ships using underwater radiated noise // Undewater Acoustic Data Processing (edited by Y.T. Chan)// Proceedings of NATO advanced study institute, 1989.
8. Машошин А.И. Особенности синтеза алгоритмов классификации морских объектов по их гидроакустическому полю// Морская радиоэлектроника, 2009, №2 (28), с. 8-12.
9. Патент РФ № 2681526.
10. Патент РФ № 2746581.
11. Патент РФ № 2681432.
12. Патент РФ № 2685419.
13. Hassab I.C. Contact Localization and Motion Analysis in the Ocean Environment: a Perspective// IEEE Journal of Oceanic Engineering, 1983, vol. OE-8, №3, pp.136-147.
14. Quazi A.H., Lerro D.T. Passive localization using time-delay estimates with sensor positional errors// JASA, 1985, vol. 78, № 5, pp.1664-1670.
15. Worthmann B.M., Song H.C., Dowling D.R. High frequency source localization in a shallow ocean sound channel using frequency difference matched field processing// Journal Acoust. Soc. Am., 2015, vol. 138, p.3549.
16. Орлов Е.Ф., Фокин В.Н., Шаронов Г.А. Исследование параметров интерференционной модуляции широкополосного звука в глубоком океане// Акустический журнал, 1988, том 34, вып.5, с. 902-907.
17. Лазарев В.А., Орлов Е.Ф., Фокин В.Н., Шаронов Г.А. Частотная зависимость параметров интерференционной модуляции широкополосного звука в мелком море // Акустический журнал, 1989, том 35, вып.4, с. 685-688.
18. Машошин А.И. Помехоустойчивость выделения максимумов в корреляционной функции широкополосного шумового сигнала морского объекта, обусловленных многолучевым распространением сигнала в водной среде// Акустический журнал, 2001, том 47, № 6, с. 823-829.
19. Машошин А.И. Исследование условий применимости корреляционной функции широкополосного многолучевого сигнала для оценки координат источника// Акустический журнал, 2017, том 63, № 3, с. 307-313.
20. Патент РФ № 2690223.
21. Патент РФ № 2724962.
22. Патент РФ № 2797161.
23. Патент РФ № 2812119.
24. Телятников В.И. Методы и устройства для определения местоположения источника звука // Зарубежная радиоэлектроника, 1978, №4. С. 66-86.
25. Kozick R.J., Sadler B.M. Communication channel estimation and waveform design: time delay estimation on parallel, flat fading channel. US Army research laboratory. 2010. 42 p.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способы определения координат морской шумящей цели | 2023 |
|
RU2812119C1 |
| Способы определения координат морской шумящей цели | 2022 |
|
RU2797161C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| Способ определения координат морской шумящей цели | 2018 |
|
RU2690223C1 |
| Способ определения координат морской шумящей цели | 2020 |
|
RU2740169C1 |
| Способ определения координат морской шумящей цели | 2021 |
|
RU2782843C1 |
| Способ определения дистанции до надводного корабля в условиях дальних зон акустической освещённости | 2022 |
|
RU2782619C1 |
Изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения, классификации и определения координат морских объектов. Технический результат заключается в повышении вероятности классификации подводного нарушителя путём определения его глубины. В заявленном способе шумопеленгаторной станцией (ШПС) с донной линейной многоэлементной антенной проводят выделение подводных объектов из потока объектов, пересекающих охраняемый рубеж. При этом осуществляют классификацию на классы "подводный объект" - "надводный объект" путём определения глубины погружения обнаруженного объекта, для чего используют многолучевое распространение сигнала в океаническом волноводе путём измерения в автокорреляционной функции широкополосного шума объекта максимумов, обусловленных интерференцией сигнала объекта, пришедшего на антенну по прямому лучу и лучу, отразившемуся от поверхности моря. 6 ил.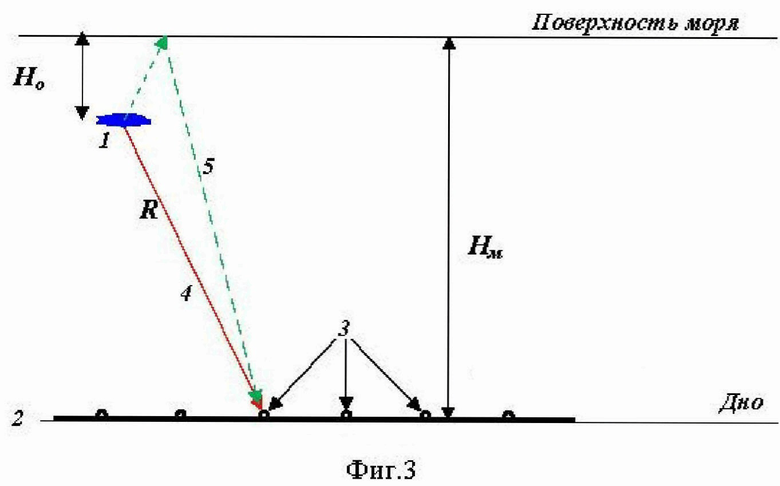
Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной, включающий определение номера гидроакустического приёмника (ГАП) антенны 




 ,
,
где 

затем вычисляют глубину морского объекта по формуле
где 
| Способ определения координат морской шумящей цели | 2018 |
|
RU2690223C1 |
| Способы определения координат морской шумящей цели | 2022 |
|
RU2797161C1 |
| Способ определения координат морской шумящей цели | 2022 |
|
RU2798416C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2559310C2 |
| МАШОШИН А.И | |||
| Исследование условий применимости корреляционной функции широкополосного многолучевого сигнала для оценки координат источника // Акустический журнал | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Приспособление для выпечки формового хлеба в механических печах с выдвижным подом без смазки форм жировым веществом | 1921 |
|
SU307A1 |
| WO 2011036013 A1, | |||

