Группа изобретений относится к беспилотным летательным аппаратам, их полезной нагрузке и оборудованию для их запуска, а именно к аэродинамической компоновке беспилотного летательного аппарата, устанавливаемому на его борту блоку видеоаппаратуры и взлетным устройствам в виде катапульты для запуска беспилотного летательного аппарата.
Из уровня техники известны беспилотные летательные аппараты (далее - БЛА), устанавливаемая на его борту видеоаппаратура и взлетные устройства в виде катапульты для запуска БЛА.
Так, в патенте РФ № RU 74891 на полезную модель «Беспилотный летательный аппарат «Обзор», МПК B64C 39/02, B64C 29/00, дата публикации 20.07.2008 г., [1], представлен БЛА, выполненный по схеме летающее крыло, содержащий крыло, вертикальное оперение и силовую установку с воздушным винтом, при этом вертикальное оперение установлено на концах консолей крыла, а задняя кромка крыла оснащена элевонами. Наличие носового обтекателя, формирующего обводы фюзеляжа, приводит к интерференции между обводами носового обтекателя и его продолжения - фюзеляжа с крылом, и к малой величине подъемной силы на носовом обтекателе. В результате уменьшается аэродинамическое качество БЛА в целом, что является недостатком БЛА [1]. Беспилотный летательный аппарат [1] принят в качестве наиболее близкого аналога заявленного БЛА.
Из сборника UAS Unmanned Aircraft Systems, The Global Perspective 2008/2009, page 101, 205, C-Astral, Slovenia - Photo: N.Trost, [2], известен блок видеоаппаратуры, содержащий видеокамеру, оснащенную средствами ее поворота в продольной и боковой плоскостях. Недостатком данного изобретения является необходимость дополнительной перенастройки видеоаппаратуры для увеличения изображения наблюдаемого объекта, что требует затрат времени, а при большой скорости БЛА - и повторных проходов над исследуемым объектом. Представленное в сборнике [2] техническое решение принято за наиболее близкий аналог заявленного блока видеоаппаратуры.
В Международной заявке №WO 96/08410 на изобретение «Launching Prujectiles» МПК B64F 1/06, дата публикации 21.03.1996 г. [3], представлена катапульта для запуска БЛА, содержащая полый цилиндр, каретку для установки БЛА, гибкую связь, соединяющую каретку с источником энергии через соединенный с полым цилиндром ролик. В качестве источника энергии в катапульте находится рабочее тело (сжатый воздух), что требует бережного обращения с катапультой, особенно в полевых условиях эксплуатации, что является недостатком известной из [3] катапульты. Также для эксплуатации катапульты [3] необходима система ее подзарядки рабочим телом. Катапульта, представленная в изобретении [3], принята за наиболее близкий аналог заявленных вариантов катапульты для запуска БЛА.
Решаемой технической задачей является повышение эффективности эксплуатации БЛА, его полезной нагрузки в виде видеоаппаратуры и взлетных устройств для запуска БЛА.
Технический результат БЛА состоит в повышении его аэродинамического качества.
Технический результат блока видеоаппаратуры заключается в сокращении времени на увеличение размера видеоизображения наблюдаемого объекта.
Технический результат вариантов катапульты заключается в упрощении конструкции и повышении надежности при эксплуатации в полевых условиях.
Сущность группы изобретений состоит в следующем.
Беспилотный летательный аппарат, как и в наиболее близком аналоге [1], выполнен по схеме летающее крыло, содержит крыло, вертикальное оперение и силовую установку с воздушным винтом, при этом вертикальное оперение установлено на концах консолей крыла, задняя кромка крыла оснащена элевонами, но, в отличие от наиболее близкого аналога [1], носовая часть БЛА сформирована путем увеличения хорды крыла за счет большей стреловидности передней кромки по сравнению с остальной частью крыла, передний контур носовой и консольной частей крыла выполнены с однотипным аэродинамическим профилем, на нижней поверхности крыла установлен блок с полезной нагрузкой, а вертикальное оперение образовано поворотом концевых частей консоли, при этом аэродинамический профиль на крыле выполнен с S-образной средней линией, который в месте перехода крыла в вертикальное оперение выполнен с меньшей второй кривизной S-образной средней линии.
БЛА характеризуется тем, что задняя кромка крыла в консольной части выполнена с прямой стреловидностью, а в центральной части - без стреловидности.
БЛА характеризуется тем, что воздушный винт выполнен толкающим и со складывающимися лопастями.
БЛА характеризуется тем, что полезная нагрузка выполнена в виде видеоаппаратуры, и БЛА оснащена средствами для установки видеоаппаратуры на нижней поверхности крыла.
БЛА характеризуется тем, что он оснащен средствами для установки на каретку катапульты.
БЛА характеризуется тем, что он оснащен посадочным парашютом, соединенным с планером БЛА сзади его центра масс.
БЛА характеризуется тем, что элевоны соединены с основной частью крыла посредством гибкого материала, не выходящего за теоретический контур аэродинамического профиля.
Блок видеоаппаратуры, как и в наиболее близком аналоге [2], содержит видеоаппаратуру, оснащенную средствами ее поворота в продольной и боковой плоскостях, но, в отличие от наиболее близкого аналога [2], блок видеоаппаратуры содержит не менее двух видеокамер, имеющих объективы с разными увеличениями, оснащен внешней и внутренней рамками, причем внутренняя рамка соединена с возможностью поворота относительно внешней рамки, а объективы всех видеокамер соединены между собой тягой и шарнирно соединены с внутренней рамкой, при этом оси шарниров поворота камер относительно внутренней рамки и соединение объективов с тягой выполнены в виде параллелограмного механизма.
Блок видеоаппаратуры характеризуется тем, что тяга кинематически связана с дистанционно управляемым приводом.
Блок видеоаппаратуры характеризуется тем, что внешняя и внутренняя рамка соединены посредством шарнира, ось которого кинематически связана с дистанционно управляемым приводом.
Блок видеоаппаратуры характеризуется тем, что внешняя рамка соединена с обтекателем, оснащенным прорезью в месте расположения объективов.
При этом прорезь закрыта прозрачным материалом.
Блок видеоаппаратуры характеризуется тем, что внешняя рамка оснащена средствами соединения с БЛА.
Катапульта для запуска БЛА по 1-му варианту выполнения, как и в наиболее близком аналоге [3], содержит короб, каретку для установки БЛА, гибкую связь, соединяющую каретку с источником энергии через соединенный с коробом ролик, но, в отличие от наиболее близкого аналога [3], гибкая связь выполнена в виде, по меньшей мере, одной гибкой упругой тяги, соединенной с торцом короба, короб выполнен составным, содержащим незамкнутый короб и крышку, верхняя поверхность ролика расположена над крышкой, при этом короб оснащен направляющими, а каретка оснащена тремя парами колес, взаимодействующих с направляющими.
Катапульта для запуска БПЛА по 1-му варианту выполнения характеризуется тем, что ролик выполнен в виде установленных на одной оси подшипников, количество которых равно количеству гибких упругих тяг.
Катапульта для запуска БПЛА по 1-му варианту выполнения характеризуется тем, что колеса каретки выполнены с ребордами, охватывающими направляющие с двух сторон, а их оси вращения перпендикулярны крышке короба.
Катапульта для запуска БПЛА по 1-му варианту выполнения характеризуется тем, что каретка и направляющие выполнены с соосными отверстиями с вертикальной осью для установки фиксатора-предохранителя в предстартовом положении каретки.
Катапульта для запуска БПЛА по 1-му варианту выполнения характеризуется тем, что на коробе закреплены упоры, на которых выполнены отверстия, соосные отверстию в каретке в ее предстартовом положении для установки в указанные соосные отверстия фиксатора, оснащенного гибким шнуром.
Катапульта для запуска БПЛА по 2-му варианту выполнения, как и в наиболее близком аналоге [4], содержит короб, каретку для установки БПЛА, гибкую связь, соединяющую каретку с источником энергии через соединенный с коробом ролик, но, в отличие от наиболее близкого аналога [4], гибкая связь выполнена в виде, по меньшей мере, одной гибкой упругой тяги, соединенной с торцом короба, который выполнен составным, содержащим незамкнутый короб и крышку, поверхность ролика расположена над крышкой, при этом короб оснащен направляющими, выходящими за ролик на расстояние, превышающее длину каретки.
Катапульта для запуска БПЛА по 2-му варианту выполнения характеризуется тем, что ролик выполнен в виде установленных на одной оси подшипников, количество которых равно количеству упругих связей.
Катапульта для запуска БПЛА по 2-му варианту выполнения характеризуется тем, что каретка оснащена двумя парами колес, которые выполнены с ребордами, охватывающими направляющие с двух сторон, а оси вращения колес перпендикулярны крышке полого цилиндра.
Катапульта для запуска БПЛА по 2-му варианту выполнения характеризуется тем, что каретка и короб выполнены с соосными отверстиями в вертикальной плоскости для установки фиксатора-предохранителя в предстартовом положении каретки.
Катапульта для запуска БПЛА по 2-му варианту выполнения характеризуется тем, что на коробе закреплен упор, в котором выполнены отверстия, соосные отверстию в каретке в ее предстартовом положении, для установки в указанные соосные отверстия фиксатора, оснащенного гибким шнуром.
Группа изобретений поясняется чертежами.
На фиг.1 представлен БПЛА при виде в плане.
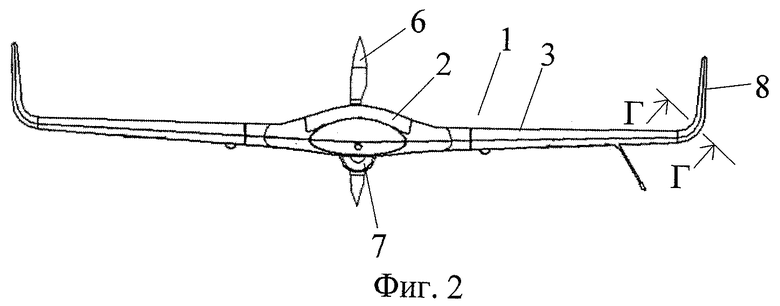
На фиг.2 представлен БПЛА при виде спереди.
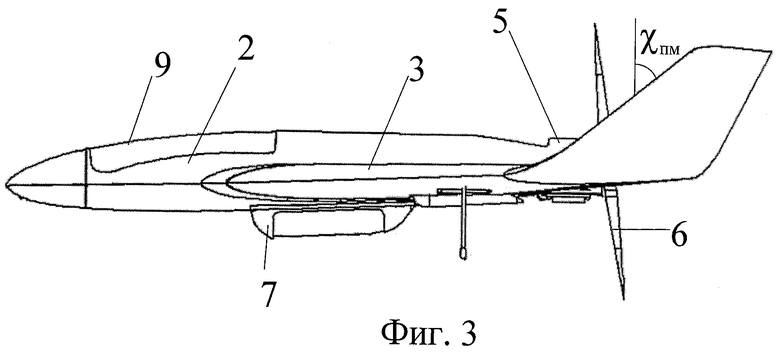
На фиг.3 представлен БПЛА при виде сбоку.
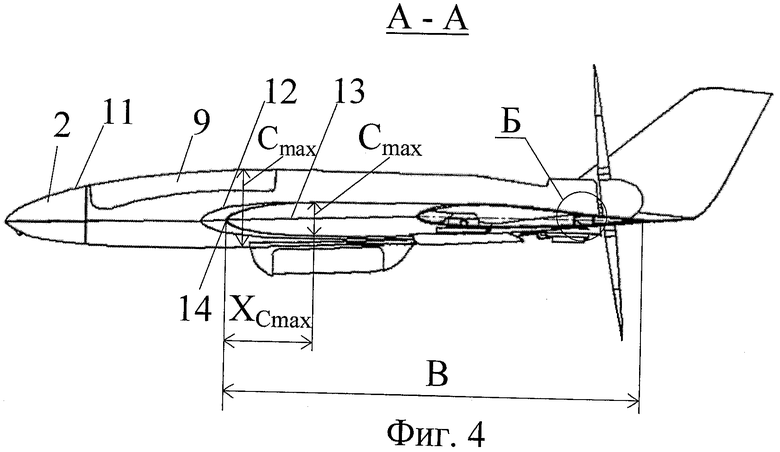
На фиг.4 показан разрез А-А на фиг.1.
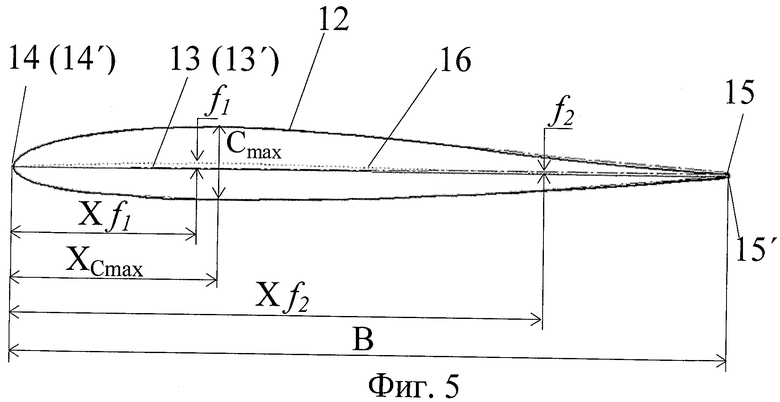
На фиг.5 показаны теоретические контуры профиля на основной части крыла и в месте перехода крыла в вертикальное оперение.
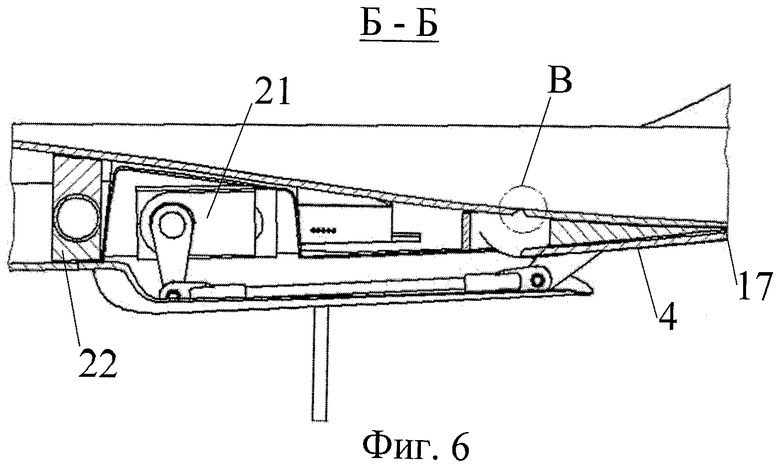
На фиг.6 показан выносной элемент Б на фиг.4.
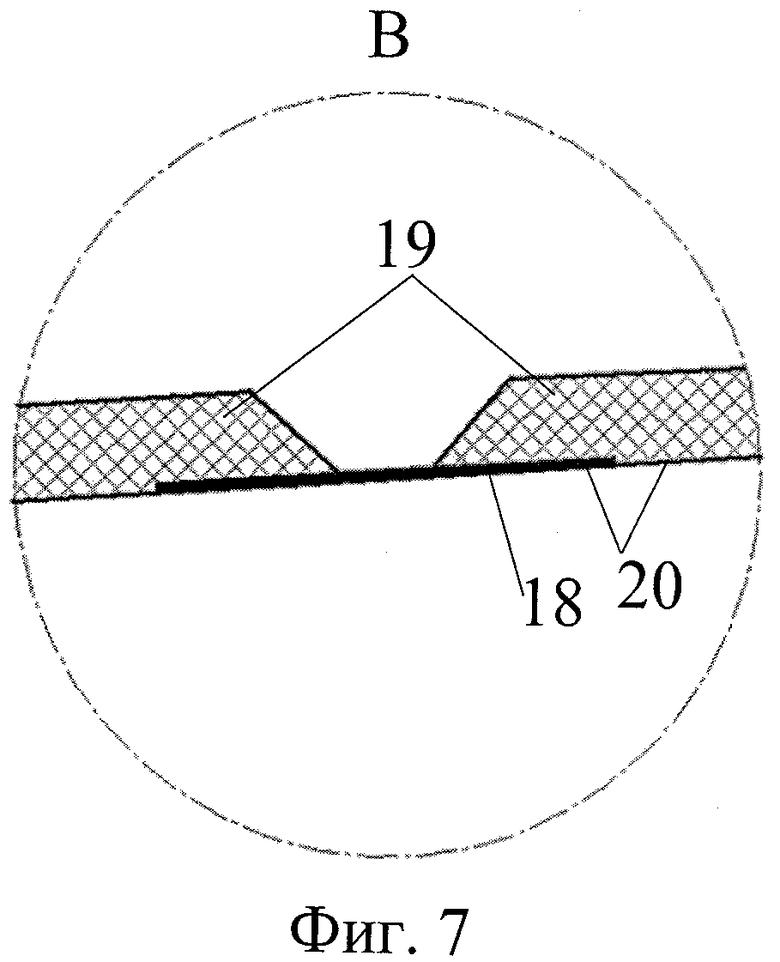
На фиг.7 показан разрез В-В на фиг.2.
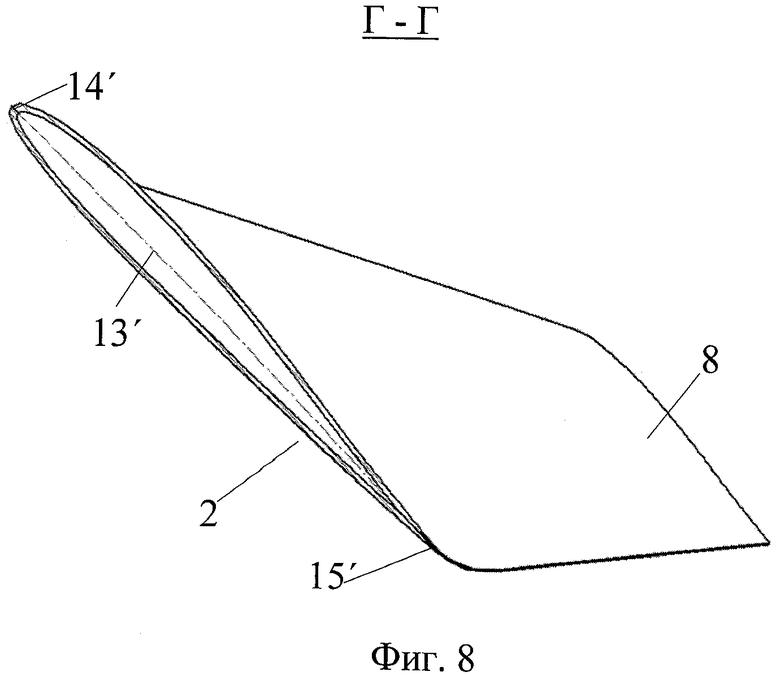
На фиг.8 показан разрез Г-Г на фиг.1.
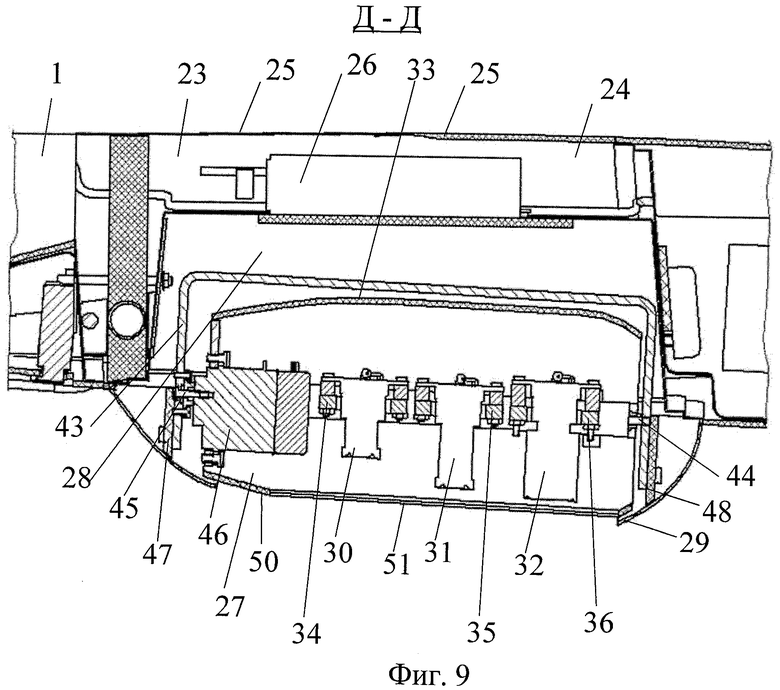
На фиг.9 показан разрез Д-Д на фиг.1.
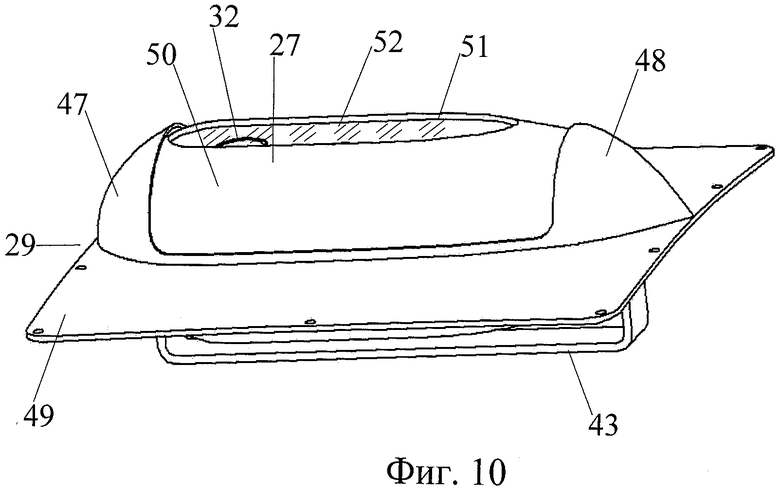
На фиг.10 показан блок видеоаппаратуры с обтекателем при виде сбоку.
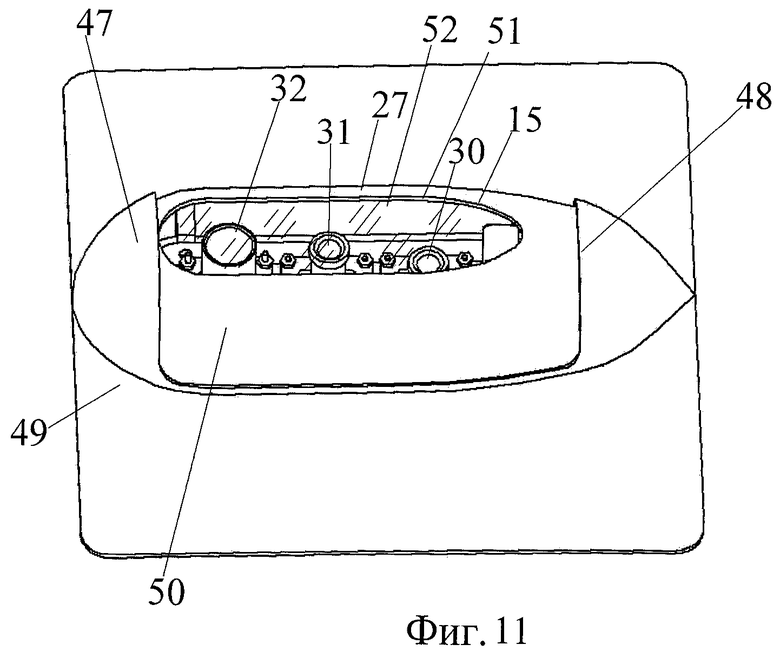
На фиг.11 показан блок видеоаппаратуры с обтекателем при виде в плане.
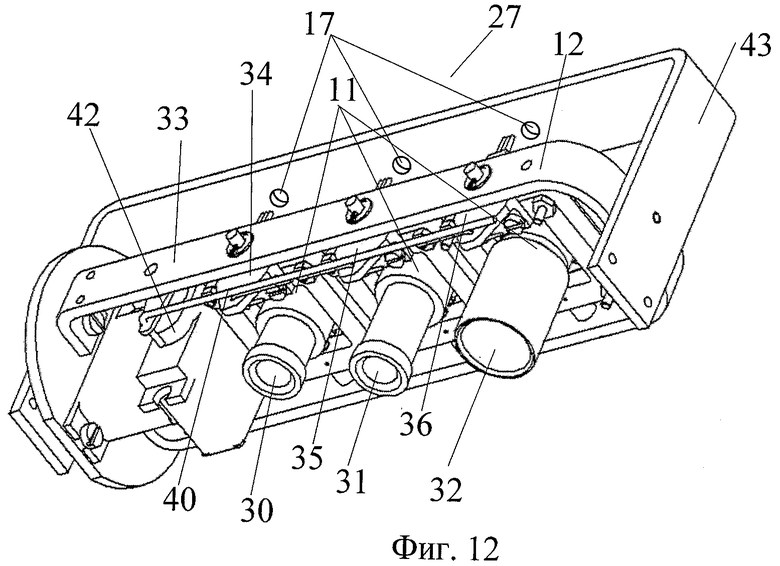
На фиг.12 показан общий вид блока видеоаппаратуры со снятым обтекателем.
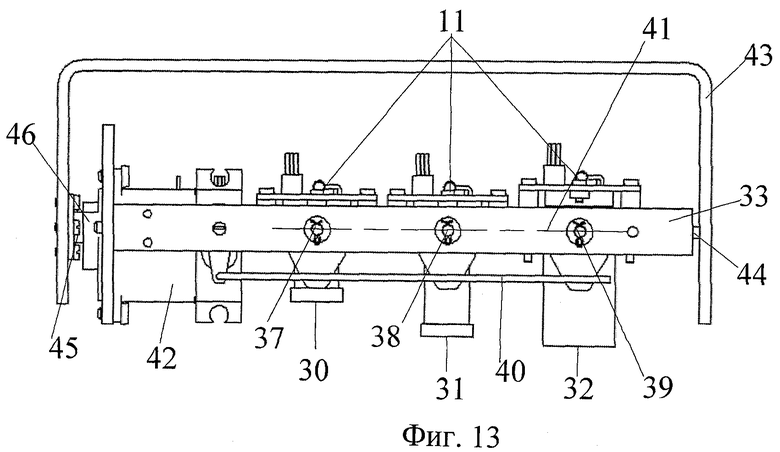
На фиг.13 показан блок видеоаппаратуры со снятым обтекателем при виде сбоку.
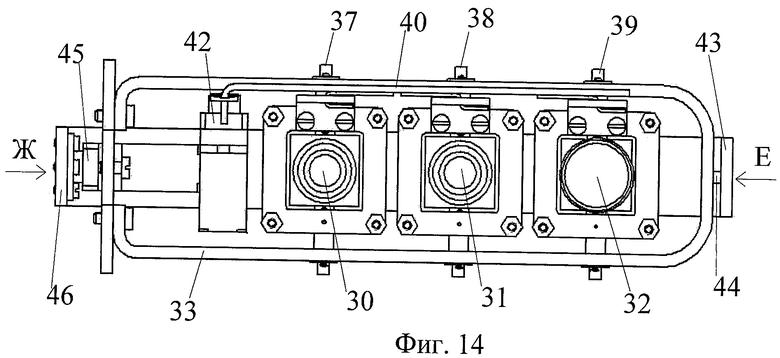
На фиг.14 показан блок видеоаппаратуры со снятым обтекателем при виде сверху.
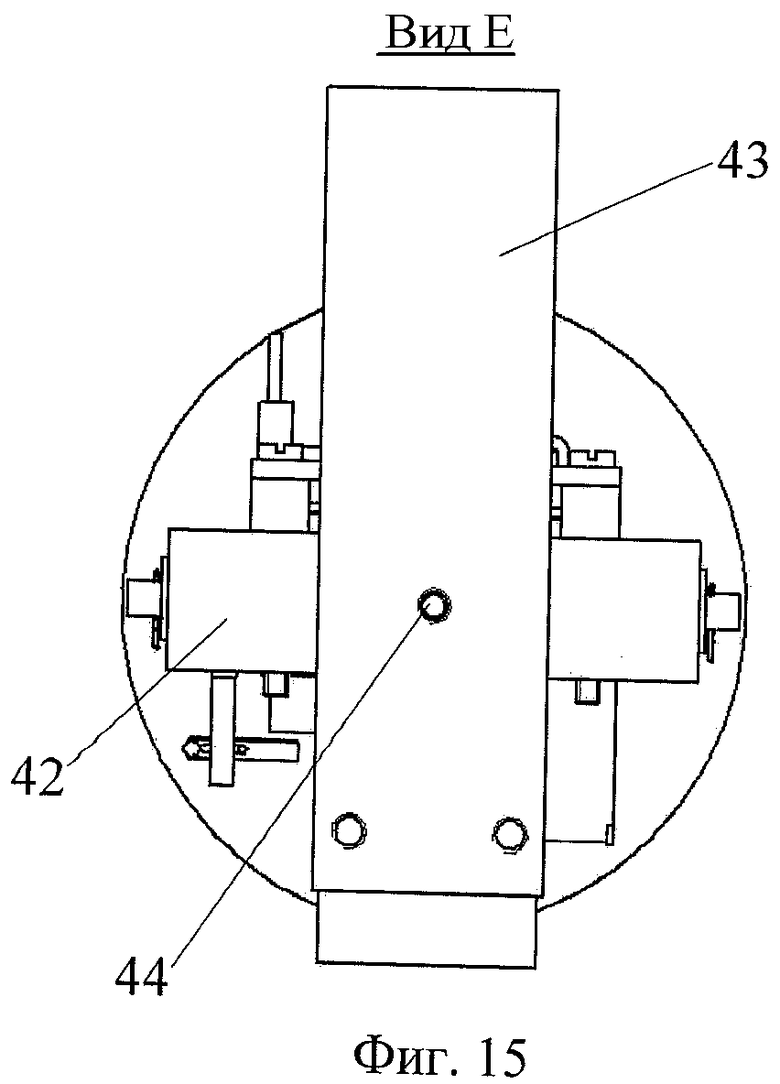
На фиг.15 показан вид Е на фиг.14.
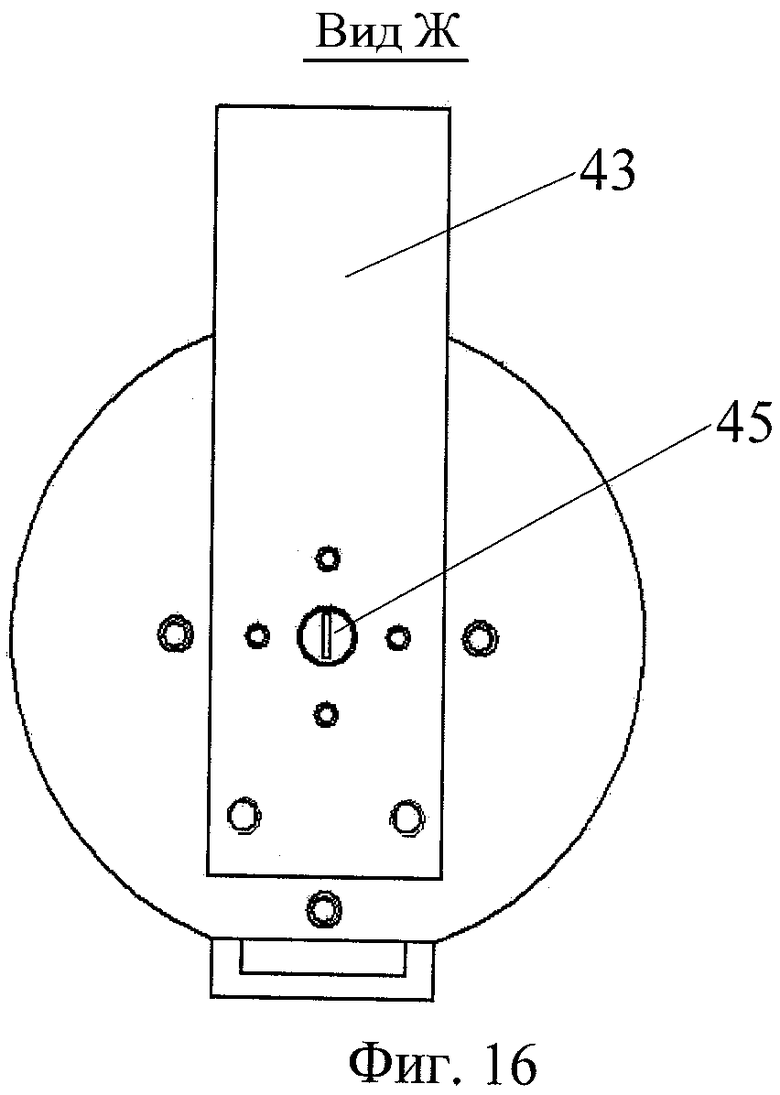
На фиг.16 показан вид Ж на фиг.14.
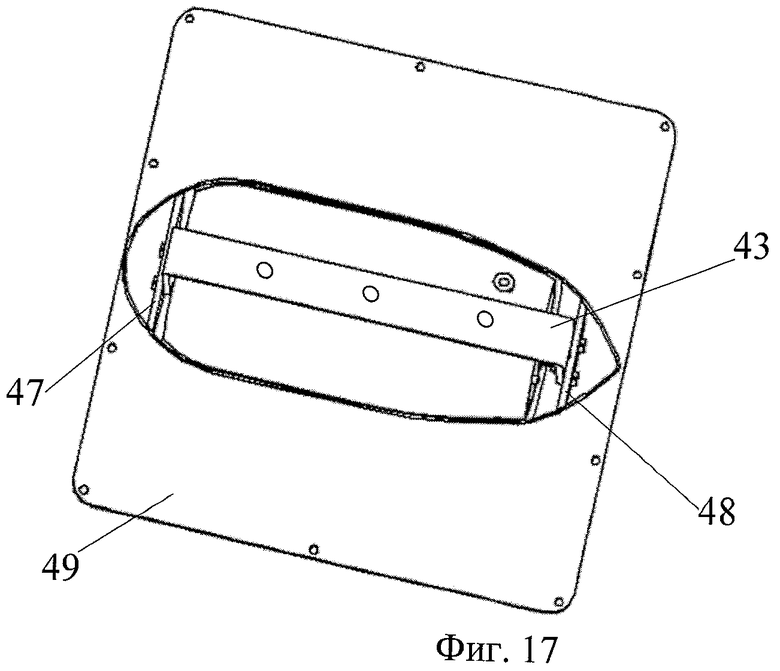
На фиг.17 показан блок видеоаппаратуры при виде сзади.
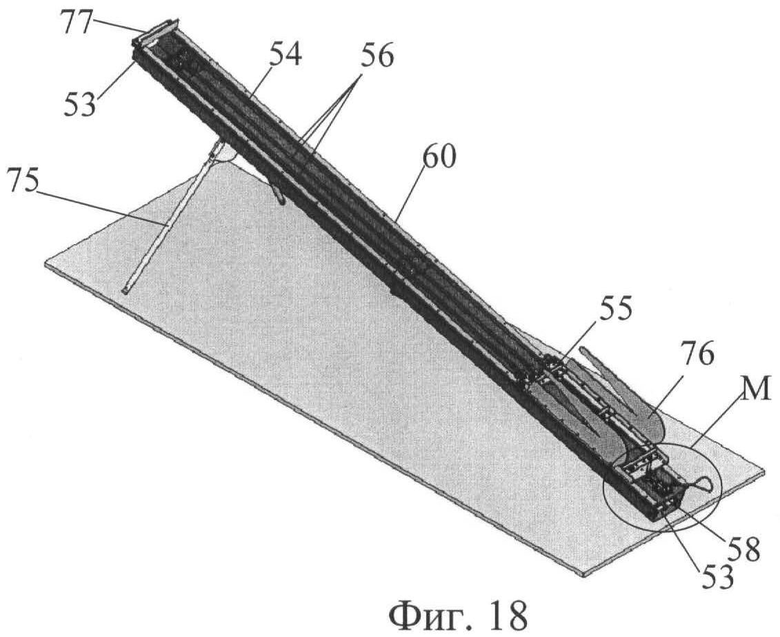
На фиг.18 показана катапульта по 1-му варианту выполнения в изометрической проекции.
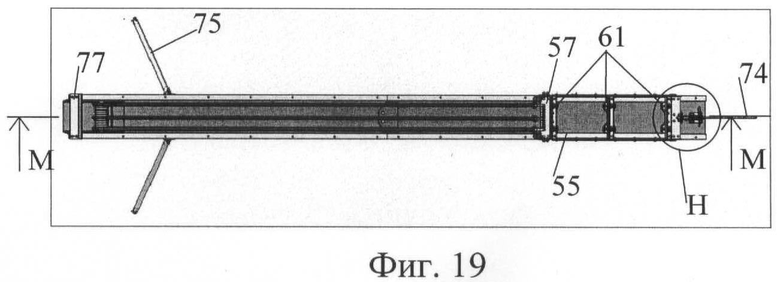
На фиг.19 показана катапульта по 1-му варианту выполнения при виде сверху.
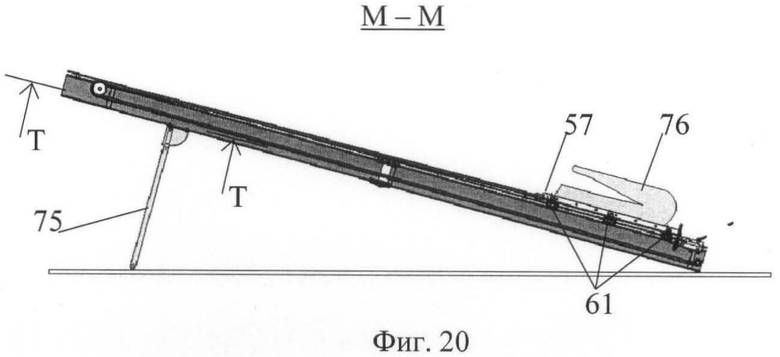
На фиг.20 показан разрез М-М на фиг.19.
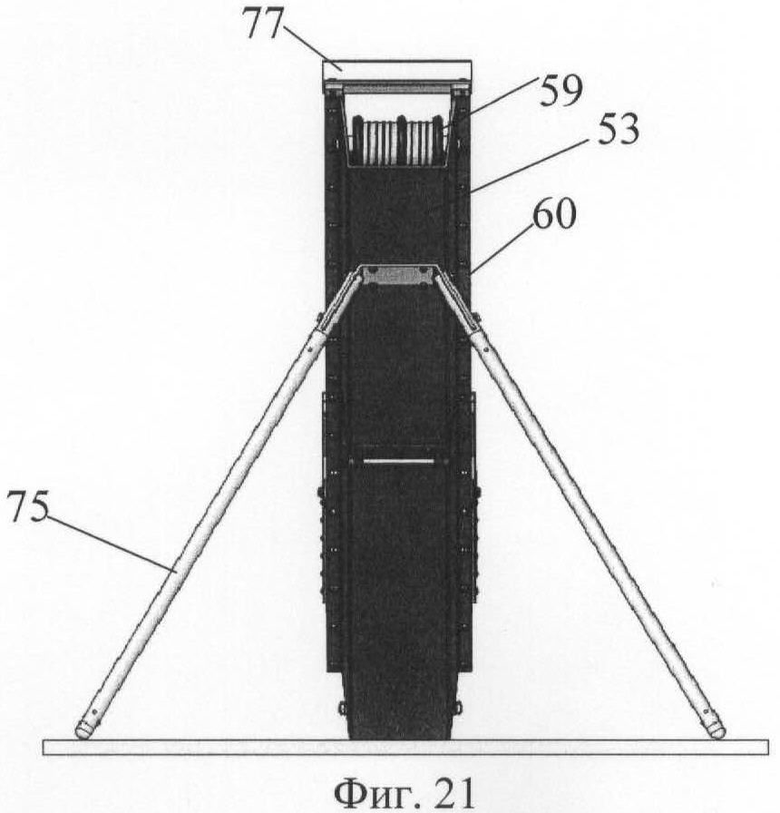
На фиг.21 показана катапульта по 1-му варианту выполнения при виде спереди.
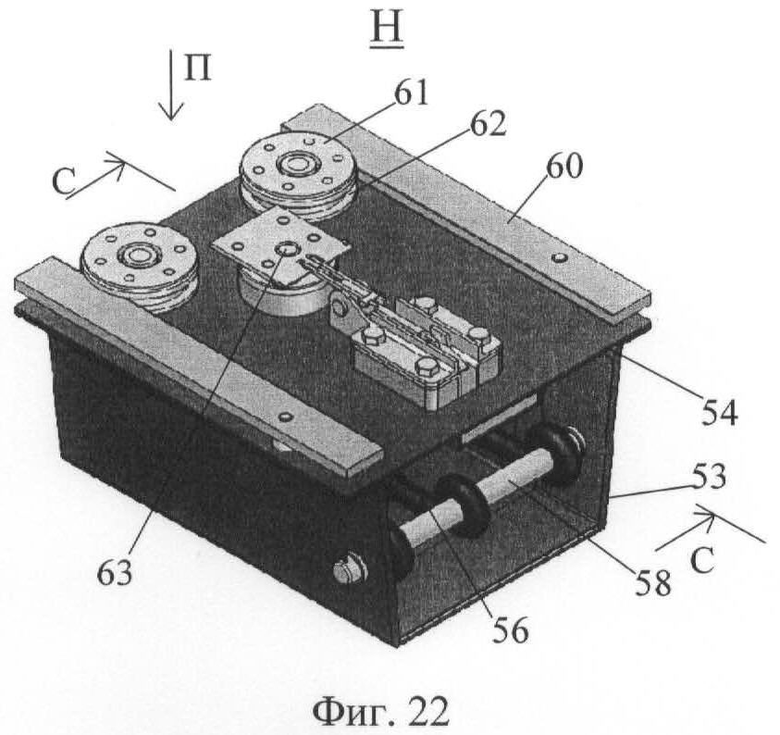
На фиг.22 показан выносной элемент Н на фиг.19.
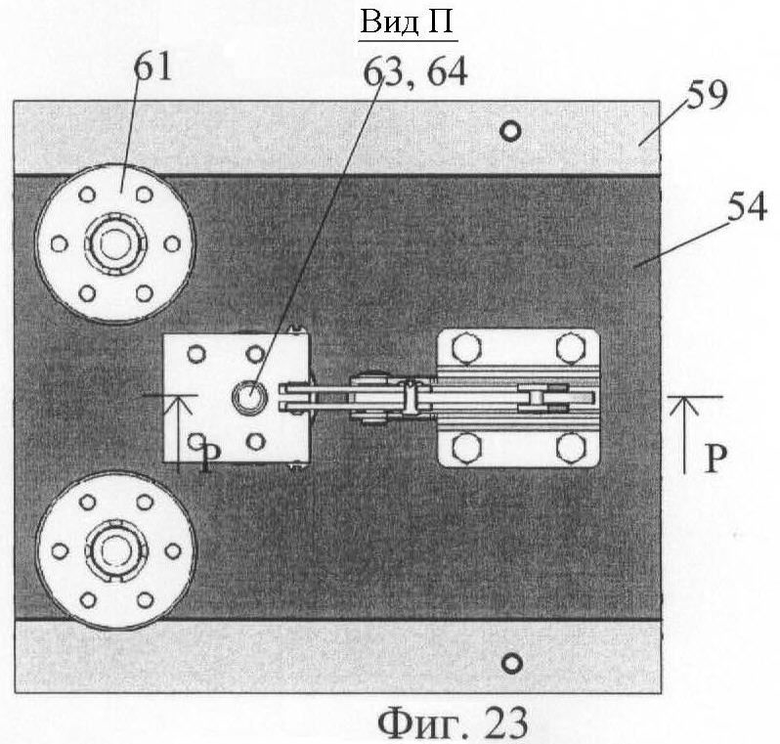
На фиг.23 показан вид П на фиг.22.
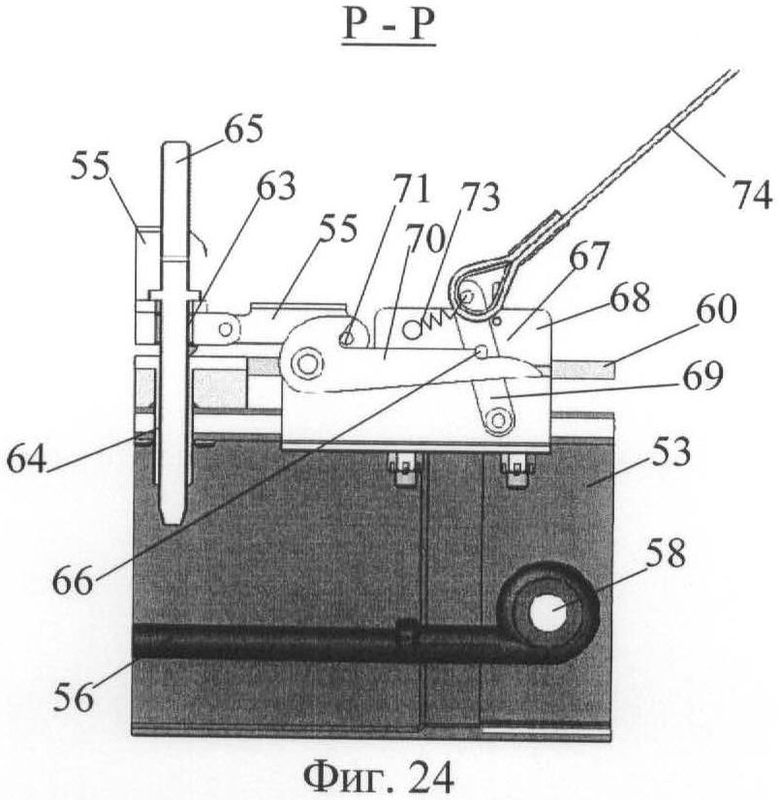
На фиг.24 показан разрез на фиг.23.
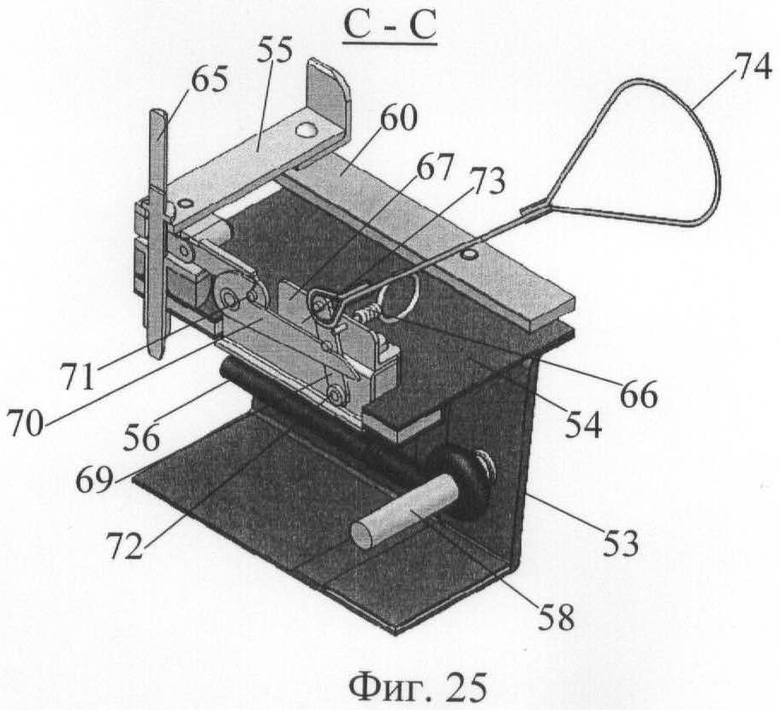
На фиг.25 показан разрез С-С на фиг.22.
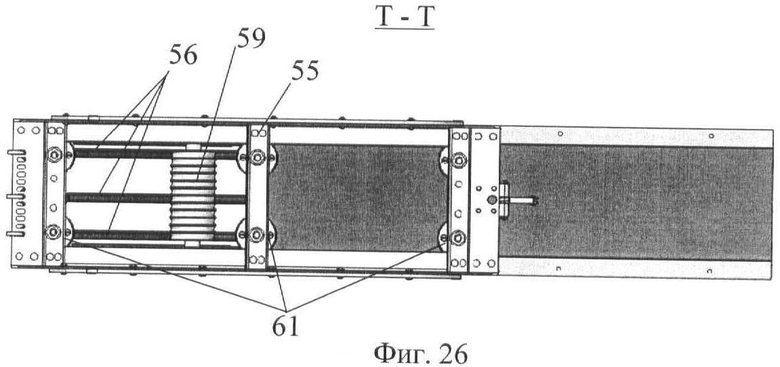
На фиг.26 показан разрез Т-Т на фиг.20 при положении каретки после запуска БПЛА.
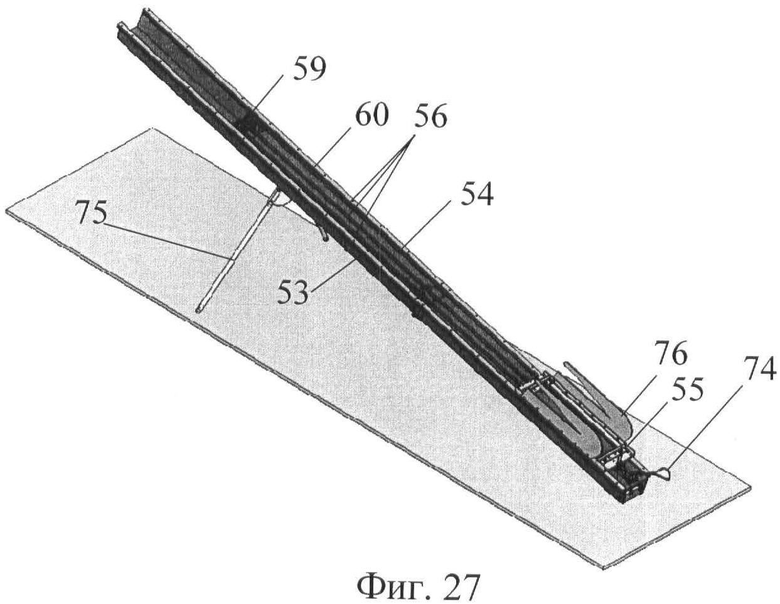
На фиг.27 показана катапульта по 2-му варианту выполнения в изометрической проекции.
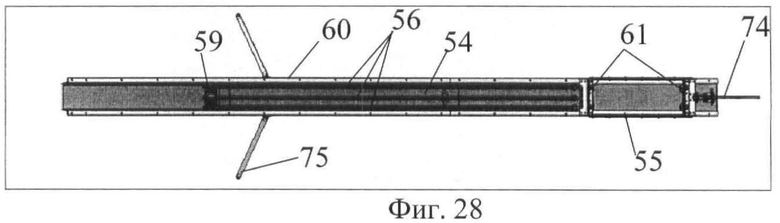
На фиг.28 показана катапульта по 2-му варианту выполнения при виде сверху.
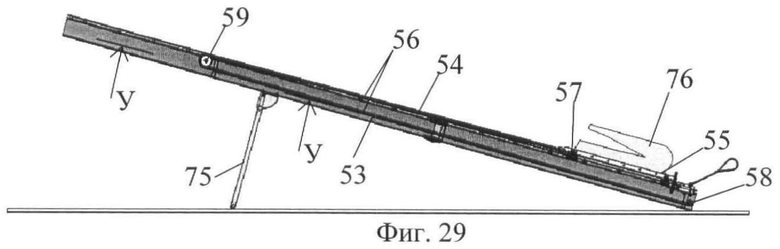
На фиг.29 показан продольный разрез катапульты по 2-му варианту выполнения.
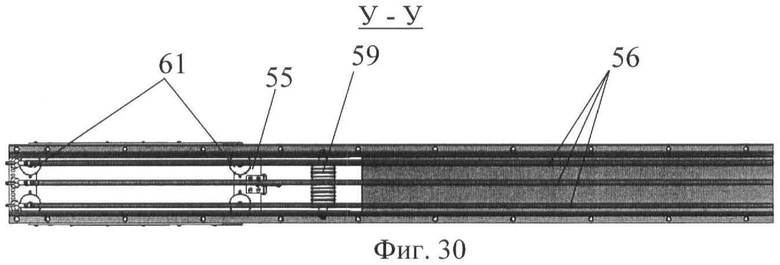
На фиг.30 показан разрез У-У на фиг.29 при положении каретки после запуска БПЛА.
Представленные в описании группы изобретений БЛА, блок видеоаппаратуры и варианты катапульты устроены следующим образом.
БЛА, как показано на фиг.1, 2, 3, выполнен по схеме летающее крыло и содержит крыло 1 с центральной 2 и консольными 3 частями, элевоны 4, вертикальное оперение, двигатель 5, кинематически связанный с воздушным винтом 6, полезную нагрузку 7 (фиг.1). Вертикальное оперение сформировано путем поворота концевых частей крыла 1 в сторону верхней поверхности крыла 1, образуя аэродинамические концевые шайбы 8. Для запуска и посадки БЛА может оснащаться блоком управления 9, взлетной и посадочной системами.
Центральная часть 2 крыла 1 образована путем увеличения прямой стреловидности χпц по передней кромке 10 по сравнению с прямой стреловидностью χпк передней кромки 10 консольной части 3 крыла 1: χпц>χпк (фиг.1). При этом, как показано на фиг.4, контуры 11 и 12 соответственно центральной 2 и консольной 3 частей крыла 1 в продольном сечении до максимальной толщины профиля cmax=Cmax/B (где Cmax - максимальная толщина, а B - длина хорды 13 крыла 1, а хорда 13 - прямая линия, соединяющая носок 14 и законцовку 15 профиля) соответствует однотипному теоретическому профилю с одинаковой относительной толщиной с и одинаковым относительным расстоянием xcmax=Xcmax/B (где Xcmax - расстояние от носка профиля до максимальной толщины профиля Сmax). Профиль также характеризуется средней линией 16, расположенной посередине между верхним и нижним контурами профиля. При симметричном профиле средняя линия 16 совпадает с хордой 13. Обозначение геометрических параметров профиля приведено на фиг.5.
Среднюю линию 16 профиля крыла 1 БЛА, выполненного по схеме летающее крыло, целесообразно выполнять с S-образной формой, с первой f1=Fi/B и второй f2=F2/B вогнутостями, расположенными на расстоянии соответственно xf1=Xf1/B, xf2=Xf2/B от носка 14 профиля. При выполнении S-образной средней линии 16 профиля крыла 1 уменьшается продольный момент аэродинамических сил Mz относительно центра масс БЛА, в связи с чем для балансировки БЛА элевоны 4 отклоняются на меньший угол. Это уменьшает их аэродинамическое сопротивление X и способствует повышению аэродинамического качества KБАЛ=YБАЛ/XБАЛ сбалансированного БЛА, выполненного по схеме летающего крыла. Аэродинамическое качество К равно отношению аэродинамической подъемной силы Y к аэродинамической силе сопротивления X:K=Y/X.
Элевоны 4 установлены вдоль задней кромки 17 крыла 1 (фиг.6) и соединены с ним посредством полоски 18 эластичного материала, при этом данный материал не выходит за контуры 12 теоретического профиля крыла 1 (фиг.7). Это достигается за счет конструктивного выполнения обшивки верхней и нижней поверхностей крыла 1. Так, при выполнении обшивки из эластичного материала, например стеклоткани, углепластика и т.п., обшивка выклеивается из нескольких слоев материала (фиг.7), а в месте соединения крыла 1 с элевоном 4 один из слоев, например нижний слой 19, выполняют с разрывом, в который вклеивают полоску 18 эластичного материала, соединяющую элевон 4 с крылом 1. Верхний слой 20 обшивки делают сплошным от передней 10 до задней 17 кромок крыла 1.
Возможно и традиционное выполнение соединения элевонов 4 с крылом 1 посредством шарнира (не показано). Но это приводит к появлению зазоров между крылом 1 и элевонами 4, что увеличивает аэродинамическое сопротивление X крыла 1 и, следовательно, уменьшает аэродинамическое качество К БЛА.
Элевон 4, как показано на фиг.6, отклоняется посредством рулевой машинки 21, закрепленной на силовом элементе конструкции крыла, например на задней стенке 22 в месте ее соединения с нервюрой (не обозначена) крыла 1. Управление рулевой машинкой 21 может выполняться по команде с блока управления 9 или по заложенной в него программе.
Аэродинамические концевые шайбы 8, имеющие в плоскости хорд такой же угол стреловидности χпш по передней кромке 10, как и χпк на консолях 3 крыла 1 (фиг.1, 3): χпш=χпк, - могут выполняться с таким же аэродинамическим профилем, как и на крыле 1 (фиг.5). При этом, как показано на фиг.8, в месте перехода крыла 1 в аэродинамические боковые шайбы 8 их аэродинамический профиль целесообразно выполнять с меньшей величиной 2-й вогнутости f2ш, чем f2 на крыле 1 (|f2ш|<|f2ш|) - Такое выполнение предотвращает отрыв пограничного слоя, который может произойти вследствие образования расширяющейся конической поверхности в месте сочленения крыла 1 и аэродинамических боковых шайб 8 при сохранении на них такого же аэродинамического профиля, как и на крыле 1. Сравнение теоретических контуров крыла 1 и аэродинамических концевых шайб 8 в вышеуказанном месте перехода представлено на фиг.5.
Взлетная система включает в себя средства для установки и фиксации БЛА на каретке катапульты. Такими средствами могут быть убираемый штырь с дистанционным управлением, паз для фиксатора, установленного на каретке, ложемент для установки БЛА на каретке (не показано) и т.п. устройства. Паз для фиксатора может располагаться как в продольной плоскости БЛА, так и симметрично относительно продольной плоскости БЛА. Взлетная система может также включать усиление задней кромки 17 крыла 1 в месте размещения в ложементах каретки, фиксатор предохранительный и/или фиксатор пусковой на планере БЛА и каретке для фиксации положения БЛА на каретке перед запуском БЛА в полет и другие средства.
Посадочная система (фиг.9) содержит парашют 23, размещенный в нише 24, закрытой лючком 25, с дистанционно управляемым сервоприводом 26 его открытия. При этом стропы парашюта 23 соединены с планером БЛА сзади его центра масс.
Полезная нагрузка 9 может выполняться в виде газоанализаторов, тепловизоров и т.п. оборудования. При выполнении визуального наблюдения полезная нагрузка выполняется в виде блока видеоаппаратуры 27 (фиг.9). При этом блок видеоаппаратуры 27, как показано на фиг.9, 10, 11, может располагаться в нише 28 крыла 1 и закрываться обтекателем 29, соединенным с нижней поверхностью крыла 1.
В предпочтительном варианте выполнения БЛА задняя кромка 17 крыла выполнена с прямой стреловидностью χзк на консольной части 3 и без стреловидности (т.е. с прямой задней кромкой 17, χцк=0 град.) в центральной части 2 крыла 1, при этом размах участка с задней кромкой 17 без стреловидности превосходит диаметр воздушного винта 6, лопасти которого выполнены складывающимися, БЛА оснащен блоком управления 9, обеспечивающим прием сигналов с пульта оператора, отклонение элевонов 4, изменение скорости вращения воздушного винта 6, выпуск посадочного парашюта 23, а также управление аппаратурой полезной нагрузки 7. При использовании в качестве полезной нагрузки 7 блока видеоаппаратуры 27 блок управления 9 обеспечивает управление по команде оператора отклонением объективов видеоаппаратуры в продольной и боковой плоскостях, регулированием требуемого увеличения изображения, передачи сведений оператору и/или записи для последующего анализа после завершения полета. Выполнение БЛА по схеме летающего крыла с использованием в передней части центральной 2 и консольных 3 частях крыла 1 одинакового теоретического профиля способствует уменьшению аэродинамического сопротивления X при повышении аэродинамической подъемной силы Y, и тем самым повышению аэродинамического качества K=Y/X БЛА. Использование теоретического профиля с S-образной средней линией 16 снижает потери подъемной силы при балансировке БЛА, повышая балансировочное аэродинамическое качество KБАЛ БЛА. Выполнение вертикального оперения в виде аэродинамических боковых шайб 8 вследствие стреловидности крыла по передней кромке 10 увеличивает плечо (расстояние от центра давления до центра масс) вертикального оперения, а также увеличивает эффективное удлинение крыла 1, снижающее индуктивное аэродинамическое сопротивление, что приводит к увеличению аэродинамического качества K БЛА.
БЛА функционирует следующим образом.
После взлета (с земли или с катапульты) БЛА в полете управляется с пульта оператора или по заданной в блоке управления 9 программе. После достижения объекта исследования включается аппаратура полезной нагрузки 7, например блок видеоаппаратуры 27, производится исследование объекта, передача сведений на пульт оператора и/или запись для последующего анализа. Затем БЛА возвращается к месту посадки, выпускается парашют 23 и, поскольку стропы парашюта 23 соединены с БЛА сзади его центра масс, производится посадка на носовую часть БЛА.
Блок видеоаппаратуры 27, как показано на фиг.9…13, содержит несколько видеоаппаратов, например телевизионных камер 30, 31, 32 с цветным изображением и разным увеличением. При этом телевизионные камеры 30, 31, 32 могут выполняться однотипными, но их объективы заранее настроены на разное увеличение за счет изменения их фокусного расстояния (фиг.9, 12). Возможна установка 2-х, 4-х и т.д. телевизионных камер, но практика показала, что для анализа внешнего вида наблюдаемого объекта достаточно 3-х камер с увеличениями, отличающимися в 2 и 4 раза.
Для регулирования угла продольного обзора наблюдаемого объекта телевизионные камеры 30, 31, 32 устанавливаются с возможностью их поворота относительно внутренней рамки 33, например, за счет соединения их держателей соответственно 34, 35, 36 посредством шарниров 37, 38, 39, обеспечивающих поворот относительно внутренней рамки 33. Для обеспечения равных углов поворота держатели 34, 35, 36 соединены между собой тягой 40, расположенной параллельно линии 41, соединяющей оси шарниров 37, 38, 39 и кинематически связанной с аналоговым сервоприводом 42 с дистанционным управлением (фиг.12, 13). В результате образуется параллелограммный механизм, обеспечивающий поворот объективов телевизионных камер 30, 31, 32 на одинаковый угол, что за счет разного фокусного расстояния их объективов позволяет практически мгновенно получать изображение с разным увеличением, без потерь времени на настройку фокусного расстояния.
Для обеспечения бокового обзора внутренняя рамка 33 соединена с внешней рамкой 43, выполненной, например, в виде скобы, с возможностью поворота за счет соединения посредством соосно установленных шарниров 44, 45 (фиг.9, 12, 14, 15, 16, 17). На внутренней рамке 33 установлен сервопривод 46, кинематически связанный с шарнирами 44, 45, например с шарниром 45 (фиг.13, 17). Сервопривод 46 выполнен с дистанционным управлением. Внешняя рамка 43 оснащена средствами для соединения с БЛА, например, за счет разъемного соединения внешней рамки 43 со стенками ниши 28 в БЛА (не показано). Однако целесообразнее обеспечить соединение внешней рамки 43 с силовыми элементами, например шпангоутами 47 и 48, обтекателя 29, который, в свою очередь, соединен с нижней поверхностью центральной части 2 крыла 1, например, посредством разъемного соединения 49 (фиг.9 10, 11).
Таким образом, благодаря сервоприводу 46 обеспечивается поворот внутренней рамки 33 относительно внешней рамки 43, обеспечивающий боковой обзор, а посредством сервопривода 42 обеспечивается поворот держателей 34, 35, 36 объективов однотипных телевизионных камер 30, 31, 32 с разными фокусными расстояниями в продольном направлении. В результате обеспечивается круговой обзор и возможность мгновенного изменения размера изображения наблюдаемого объекта.
Внутренняя рамка 33 может оснащаться обтекателем 50, в котором выполнена прорезь 51 напротив объективов телевизионных камер 30, 31, 32, которая закрыта прозрачным материалом, например оргстеклом 51 (фиг.10, 11).
В предпочтительном выполнении блока видеоаппаратуры 27 имеется 3 телевизионные камеры 30, 31, 32 с цветным изображением и увеличением в 5, 10 и 20 раз, внешняя рамка 43 соединена со шпангоутами 47, 48 обтекателя 29, который соединен с нижней поверхностью центральной части 2 крыла 1 посредством разъемного соединения 49, внутренняя рамка 33 оснащена обтекателем 50, в котором выполнена прорезь 51, закрытая прозрачным материалом, например оргстеклом 52.
Блок видеоаппаратуры 27 функционирует следующим образом. Блок видеоаппаратуры 27 устанавливается на летательный аппарат, например, БЛА, подсоединяется к блоку управления 9 БЛА и после взлета БЛА и достижения объекта исследования (например, трубопровода, линии электропередач и т.п.) по сигналу с пульта оператора или по заданной в блоке управления 9 программе начинает видеонаблюдение объекта. При этом посредством управления сервоприводами 42, 46 блоком управления 9 с пульта оператора (или по заданной программе) производится отклонении объективов телевизионных камер 30, 31, 32 по направлению полета и в боковой плоскости. Переключая объективы с разными фокусными расстояниями обеспечивается видеонаблюдение объекта с разным увеличением, без потерь времени на перенастройку фокусного расстояния. Наличие обтекателя 50 с прорезью 51 напротив объективов, закрытой оргстеклом 52, предохраняет блок видеоаппаратуры 27 от атмосферных осадков и загрязнения.
Система взлета содержит катапульту, варианты которой устроены следующим образом.
Катапульта, как показано на фиг.18…22, содержит короб 53, образованный незамкнутым коробом (не обозначен) с верхней крышкой 54, каретку 55 и пусковой механизм, включающий, по меньшей мере одну гибкую упругую тягу 56, одним концом соединенную с кареткой 55 (например, с закрепленном на каретке 55 упором 57), проходящую над верхней крышкой 54 и охватывающую установленный на противоположном конце короба 53 ролик, и соединенную на противоположном конце с упором 58, соединенном с коробом 53. Ролик целесообразно выполнять в виде установленных на оси подшипников 59, количество которых соответствует количеству гибких упругих тяг 56. Короб 53 может выполняться с закрытым одним или обоими торцами (не показаны).
На коробе 53 установлены направляющие 60 (фиг.18, 19, 21), взаимодействующие с колесами 61 (фиг.19, 20), оси которых закреплены на каретке 55. Направляющие 60 выполнены в виде пластины, а колеса 61 каретки 55 - с двумя ребордами 62, охватывающими направляющие 60, при этом оси колес 61 расположены перпендикулярно верхней крышке 54 (фиг.22).
Каретка 55 и короб 53, как показано на фиг.22, 23, 24, 25, оснащены отверстиями 63 и 64, выполненными соосными в предстартовом положении каретки 55, для установки фиксатора-предохранителя, выполненного, например, в виде штыря 65.
Пусковой механизм также содержит пусковой фиксатор, выполненный, например, в виде штыря 66, соединяющего каретку 55 с упорами 67, соединенными с коробом 53, устанавливаемого в отверстие 68 на упорах 67, соединенных с верхней крышкой 54 незамкнутого короба 53. При этом штырь 66 фиксирует рычаг 69 спускового механизма каретки 55, который кинематически связан со спусковым крюком 70, охватывающим ось 71, установленную на каретке 55. Рычаг 69 соединен с упором 67 посредством шарнира 72 и упругой связи 73 и шарнирно соединен с гибким шнуром 74 для дистанционного запуска БЛА (фиг.24, 25).
Катапульта может оснащаться поворотными опорами 75 для наземного запуска БЛА (фиг.18, 20, 21). Каретка 55 оснащена ложементом 76 для установки БЛА, выполненным, например, в виде ложа для нижней поверхности крыла 1 и пазом для хвостовых частей крыла 1 БЛА (фиг.18, 20). Для фиксации гибких упругих тяг 56 в нерабочем положении катапульты на коробе 53 установлено устройство для крепления на ней гибких упругих тяг 56, выполненное, например, в виде оси или планки 77 с отверстиями (фиг.18…21), аналогичной упору 57, установленной на каретке 55.
В 1-м варианте выполнения катапульты каретка 55 выполнена с тремя парами колес 61, и направляющие 60 могут заканчиваться на уровне ролика (фиг.18, 19, 20). Во 2-м варианте выполнения катапульты (фиг.27, 28, 29) выполнена с двумя парами колес 61, а направляющие 60 выходят за пределы ролика на расстояние, не меньшее длины каретки 55 (фиг.30).
Варианты катапульты функционируют следующим образом.
Каретка 55 устанавливается в исходное положение на направляющих 60 и фиксируется предохранительным штырем 65, вставленным в соосные отверстия 63, 64, и пусковым штырем 66 (фиг.22, 23, 24, 25). Затем поочередно снимается с планки 77, натягивается и фиксируется на каретке 55 каждая упругая гибкая тяга 56. Выполнение ролика в виде установленных на ось подшипников 59 обеспечивает легкое натяжение гибких упругих тяг 56. Количество упругих гибких тяг 56 выбирается в зависимости от массы БЛА с кареткой 55 и скорости взлета БЛА. На каретку 55 в ложемент 76 устанавливается БЛА.
Перед запуском вынимается штырь 65 фиксатора-предохранителя каретки 55, а затем гибким шнуром 74 вытягивается пусковой штырь 66. Каретка 55 с БЛА под действием силы упругости тяг 56 разгоняется вдоль направляющих 60 и после прохождения оси ролика этими же гибкими упругими тягами 55 тормозится. При этом БЛА, имеющий большую скорость, выходит из каретки 55 и взлетает.
В 1-м выполнении катапульты каретка 55 с тремя парами колес 61 остается в направляющих 60 в связи с выходом за пределы направляющих 55 только одной пары колес 61 и сохранением на направляющих двух пар колес 77. Во 2-м варианте выполнения катапульты каретка 55 остается на направляющих 60 благодаря выполнению их выходящими за ролик в виде подшипников 59 на расстояние не меньшее длины каретки 55.
Выполнение колес 61 с ребордами 62, охватывающими направляющие 60, компенсирует момент силы относительно точки соприкосновения упругих гибких тяг 56 с поверхностью подшипников 59 ролика. Наличие опор 75 позволяет устанавливать катапульту под требуемым углом к горизонтальной поверхности.
Выполнение катапульты с коробом 53 с верхней крышкой 54 обеспечивает защиту гибких упругих тяг 56, находящихся между крышкой 54 и дном короба 53, от атмосферных осадков и загрязнения, а выполнение ролика состоящим из подшипников 59, количество которых соответствует количеству гибких упругих тяг 56, облегчает подготовку катапульты к запуску БЛА. В результате повышается безопасность катапульты, упрощается конструкция и повышается надежность при эксплуатации в полевых условиях.
Представленные в описании изобретения могут использоваться каждое в отдельности независимо друг от друга. В то же время, все изобретения объединены единым изобретательским замыслом и могут использоваться в комплексе.
Так, при выполнении полезной нагрузки 7 в виде блока видеоаппаратуры 27 данный блок 27, оснащенный обтекателем 29, устанавливается в нишу 28 центральной части 2 крыла 1. В результате уменьшается площадь миделя БЛА, а удлиненная форма обтекателя 29, обусловленная наличием не менее чем двух телевизионных камер, уменьшает профильное сопротивление обтекателя в связи с увеличением его удлинения. В результате повышается аэродинамическое качество БЛА в целом. Наличие средства соединения с катапультой в виде ложементов 76 на каретке 55 обеспечивает фиксацию БЛА в катапульте.
Варианты катапульты также обеспечивают одинаковый технический результат, имеют одинаковый принцип работы и отличаются между собой средствами, обеспечивающими сохранение положения каретки 55 на направляющих 60 после взлета БЛА путем оснащения каретки 55 дополнительной парой колес 61, обеспечивающих взаимодействие 2-х пар колес 61 с направляющими 60, или увеличением длины направляющих 60.
Таким образом, соблюдены условия обеспечения единства изобретения.
Уровень раскрытия конструкции БЛА, блока видеоаппаратуры и вариантов выполнения катапульты достаточен для их разработки и изготовления на специализированном предприятии, следовательно, группа изобретений соответствует условию патентоспособности «промышленная применимость».
Перечень позиций и обозначений, использованных в описании группы изобретений
1 - крыло БЛА;
2 - центральная часть крыла;
3 - консольная часть крыла;
4 - элевоны крыла 1;
5 - двигатель;
6 - воздушный винт;
7 - полезная нагрузка БЛА;
8 - аэродинамическая концевая шайба;
9 - блок управления;
10 - передняя кромка крыла 1;
11 - контур центральной части 2 крыла 1;
12 - контур консольной части 3 крыла 1;
13 - хорда профиля;
14 - носок профиля;
15 - законцовка профиля;
16 - средняя линия профиля;
17 - задняя кромка крыла 1;
18 - полоска эластичного материала;
19 - нижний слой обшивки;
20 - верхний слой обшивки;
21 - рулевая машинка отклонения элевонов 4;
22 - задняя стенка конструкции крыла 1;
23 - парашют;
24 - ниша;
25 - лючок, перекрывающий нишу 24;
26 - сервопривод открывания лючка 25;
27 - блок видеоаппаратуры;
28 - ниша для размещения блока видеоаппаратуры;
29 - обтекатель блока видеоаппаратуры;
30 - телевизионная камера;
31 - телевизионная камера;
32 - телевизионная камера;
33 - внутренняя рамка;
34 - держатель телевизионной камеры 30;
35 - держатель телевизионной камеры 31;
36 - держатель телевизионной камеры 32;
37 - шарнир, соединяющий держатель 34 с внутренней рамкой 33;
38- шарнир, соединяющий держатель 35 с внутренней рамкой 33;
39 - шарнир, соединяющий держатель 36 с внутренней рамкой 33;
40 - тяга, соединяющая держатели 33, 34, 35 между собой с возможностью их поворота;
41 - проекция линии, соединяющей оси шарниров 37, 38, 39 на продольную плоскость;
42 - сервопривод, кинематически связанный с тягой 40;
43 - внешняя рамка;
44 - шарнир, соединящий внутреннюю 33 и внешнюю 43 рамки между собой;
45 - шарнир, соединящий внутреннюю 33 и внешнюю 43 рамки между собой;
46 - сервопривод, кинематически связанный шарниром 45;
47 - шпангоут обтекателя 29;
48 - шпангоут обтекателя 29;
49 - разъемное соединение обтекателя 29 с центральной частью 2 крыла 1;
50 - обтекатель внешней рамки 33;
51 - прорезь в обтекателе 50 напротив объективов телевизионных камер 30, 31, 32;
52 - оргстекло, закрывающее прорезь 51;
53 - незамкнутый короб;
54 - верхняя крышка незамкнутого короба 53;
55 - каретка;
56 - гибкая упругая тяга;
57 - упор для гибких упругих тяг 56 на тележке 55;
58 - упор для гибких упругих тяг 56 на незамкнутом коробе 53;
59 - подшипник;
60 - направляющие;
61 - колесо каретки;
62 - реборды на колесе 61 каретки 55;
63 - отверстие в каретке 55;
64 - отверстие в незамкнутом коробе 53, соосное отверстию 63 в предстартовом положении каретки 55;
65 - штырь, вставляемый в отверстия 63 и 64 для предохранительной фиксации каретки 55;
66 - штырь дистанционного пуска;
67 - упор, соединенный с незамкнутым коробом 71;
68 - отверстие на упоре 67;
69 - рычаг спускового механизма;
70 - спусковой крюк;
71 - ось на каретке 55, охватываемая спусковым крюком 70;
72 - шарнир, соединяющий рычаг 69 с упором 67;
73 - упругая связь, соединяющая рычаг 69 с упором 67;
74 - гибкий шнур, соединенный с рычагом 69;
75 - поворотная опора катапульты;
76 - ложемент на каретке 55 для установки БЛА.
77 - планка для крепления на ней гибких упругих тяг 56 в нерабочем состоянии.
c=Cmax/B - относительная толщина профиля;
Cmax - максимальная толщина профиля;
B - хорда профиля;
xcmax=Xcmax/B - положение максимальной толщины профиля;
Xcmax - расстояние от носка профиля до максимальной толщины профиля;
F1 - первая вогнутость профиля, равная максимальному удалению от хорды 13 средней линии 16 профиля 1-ой вогнутости;
F2 - вторая вогнутость профиля, равная максимальному удалению от хорды 13 средней линии 16 профиля 2-ой вогнутости;
Xf1 - расстояние от носка 14 хорды 13 профиля до положения 1-й вогнутости;
Xf2 - расстояние от носка 14 хорды 13 профиля до положения 2-й вогнутости;
f1=F1/B - первая относительная вогнутость профиля;
f2=F2/B - вторая относительная вогнутость профиля;
xf1=Xf1/B - относительное положение от носка 14 профиля 1-й вогнутости;
xf2=Xf2/B - относительное положение от носка 14 профиля 2-й вогнутости;
K=Y/X - аэродинамическое качество;
Y - аэродинамическая подъемная сила;
X - аэродинамическая сила сопротивления;
Mz - продольный момент аэродинамических сил.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| Малоразмерный беспилотный летательный аппарат | 2023 |
|
RU2812634C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| БПЛА из унифицированных деталей и узлов и способ его изготовления | 2023 |
|
RU2812011C1 |
| БПЛА из унифицированных деталей и узлов, изготовленных методом литья под давлением, и способ его изготовления | 2023 |
|
RU2814641C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЯДЕРНОЙ БОЕГОЛОВКОЙ | 2009 |
|
RU2397114C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2461494C2 |
Изобретение относится к беспилотному летательному аппарату (БПЛА), устанавливаемому на его борту блоку видеоаппаратуры и катапультам для запуска БПЛА. БПЛА выполнен по схеме летающее крыло. Носовая часть БПЛА сформирована путем увеличения хорды крыла за счет большей стреловидности передней кромки по сравнению с остальной частью крыла. Передний контур носовой и консольной частей крыла выполнены с однотипным аэродинамическим профилем. Аэродинамический профиль на крыле выполнен с S-образной средней линией, который в месте перехода крыла в вертикальное оперение выполнен с меньшей второй кривизной S-образной средней линии. Вертикальное оперение образовано поворотом концевых частей консоли (концевые шайбы). На крыле установлен блок видеоаппаратуры, содержащий видеоаппаратуру, оснащенную средствами ее поворота в продольной и боковой плоскостях. Блок видеоаппаратуры содержит не менее двух видеокамер, имеющих объективы с разными увеличениями. Блок оснащен внешней и внутренней рамками. Внутренняя рамка соединена с возможностью поворота относительно внешней рамки. Объективы всех видеокамер соединены между собой тягой и шарнирно соединены с внутренней рамкой. Оси шарниров поворота камер относительно внутренней рамки и соединение объективов с тягой выполнены в виде параллелограмного механизма. Катапульта для запуска БПЛА содержит короб, каретку для установки, гибкую связь, соединяющую каретку с источником энергии. Короб выполнен составным и содержит незамкнутый короб и крышку. Короб оснащен направляющими, а каретка оснащена колесами, взаимодействующими с направляющими. Достигается повышение эффективности эксплуатации БПЛА, его полезной нагрузки и взлетных устройств БПЛА, в частности повышение аэродинамического качества БПЛА, сокращение времени на увеличение размера видеоизображения, упрощение конструкции и повышение надежности при эксплуатации катапульт в полевых условиях. 4 н. и 19 з.п. ф-лы, 30 ил.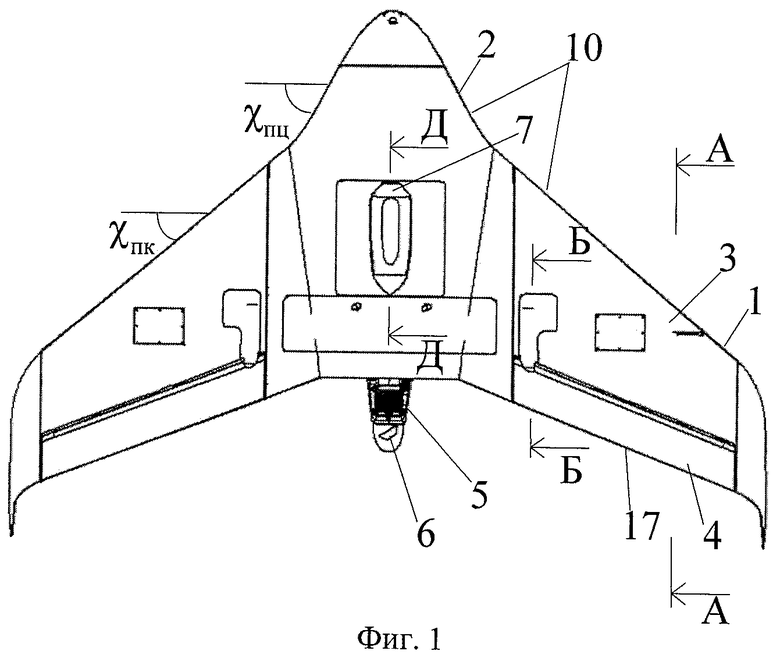
1. Беспилотный летательный аппарат, выполненный по схеме летающее крыло, содержит крыло, вертикальное оперение и силовую установку с воздушным винтом, при этом вертикальное оперение установлено на концах консолей крыла, задняя кромка крыла оснащена элевонами, отличающийся тем, что носовая часть БЛА сформирована путем увеличения хорды крыла за счет большей стреловидности передней кромки по сравнению с остальной частью крыла, передний контур носовой и консольной частей крыла выполнен с однотипным аэродинамическим профилем, на крыле установлен блок с полезной нагрузкой, а вертикальное оперение образовано поворотом концевых частей консоли, при этом аэродинамический профиль на крыле выполнен с S-образной средней линией, который в месте перехода крыла в вертикальное оперение выполнен с меньшей второй кривизной S-образной средней линии.
2. Беспилотный летательный аппарат по п.1, отличающийся тем, что задняя кромка консольной части крыла выполнена с прямой стреловидностью, а в центральной части - без стреловидности.
3. Беспилотный летательный аппарат по п.1, отличающийся тем, что воздушный винт выполнен толкающим и со складывающимися лопастями.
4. Беспилотный летательный аппарат по п.1, отличающийся тем, что полезная нагрузка выполнена в виде видеоаппаратуры, а беспилотный летательный аппарат оснащен средствами для установки видеоаппаратуры на нижней поверхности крыла.
5. Беспилотный летательный аппарат по п.1, отличающийся тем, что он оснащен средствами для установки на каретку катапульты.
6. Беспилотный летательный аппарат по п.1, отличающийся тем, что он оснащен посадочным парашютом, соединенным с планером беспилотного летательного аппарата сзади его центра масс.
7. Беспилотный летательный аппарат по п.1, отличающийся тем, что элевоны соединены с основной частью крыла посредством гибкого материала, не выходящего за теоретический контур аэродинамического профиля.
8. Блок видеоаппаратуры, содержащий видеоаппаратуру, оснащенную средствами ее поворота в продольной и боковой плоскостях, отличающийся тем, что блок видеоаппаратуры содержит не менее двух видеокамер, имеющих объективы с разными увеличениями, оснащен внешней и внутренней рамками, причем внутренняя рамка соединена с возможностью поворота относительно внешней рамки, а объективы всех видеокамер соединены между собой тягой и шарнирно соединены с внутренней рамкой, при этом оси шарниров поворота камер относительно внутренней рамки и соединение объективов с тягой выполнены в виде параллелограмного механизма.
9. Блок видеоаппаратуры по п.8, отличающийся тем, что тяга кинематически связана с дистанционно управляемым приводом.
10. Блок видеоаппаратуры по п.8, отличающийся тем, что внешняя и внутренняя рамки соединены посредством шарнира, ось которого кинематически связана с дистанционно управляемым приводом.
11. Блок видеоаппаратуры по п.8, отличающийся тем, что внешняя рамка соединена с обтекателем, который оснащен прорезью для объективов.
12. Блок видеоаппаратуры по п.11, отличающийся тем, что прорезь закрыта прозрачным материалом.
13. Блок видеоаппаратуры по п.8, отличающийся тем, что внешняя рамка оснащена средствами соединения с беспилотным летательным аппаратом.
14. Катапульта для запуска беспилотного летательного аппарата, содержащая короб, каретку для установки беспилотного летательного аппарата, гибкую связь, соединяющую каретку с источником энергии через соединенный с коробом ролик, отличающаяся тем, что гибкая связь выполнена в виде, по меньшей мере, одной гибкой упругой тяги, соединенной с торцом короба, короб выполнен составным, содержащим незамкнутый короб и крышку, верхняя поверхность ролика расположена над крышкой, при этом короб оснащен направляющими, а каретка оснащена тремя парами колес, взаимодействующими с направляющими.
15. Катапульта для запуска беспилотного летательного аппарата по п.14, отличающаяся тем, что ролик выполнен в виде установленных на одной оси подшипников, количество которых равно количеству гибких упругих тяг.
16. Катапульта для запуска беспилотного летательного аппарата по п.14, отличающаяся тем, что колеса каретки выполнены с ребордами, охватывающими направляющие с двух сторон, а их оси вращения перпендикулярны крышке короба.
17. Катапульта для запуска беспилотного летательного аппарата по п. 14, отличающаяся тем, что каретка и направляющие выполнены с соосными отверстиями с вертикальной осью для установки фиксатора-предохранителя в предстартовом положении каретки.
18. Катапульта для запуска беспилотного летательного аппарата по п.14, отличающаяся тем, что короб оснащен упором, на котором выполнены отверстия, соосные с отверстием в каретке в ее предстартовом положении для установки в указанные соосные отверстия фиксатора, оснащенного гибким шнуром.
19. Катапульта для запуска беспилотного летательного аппарата, содержащая короб, каретку для установки беспилотного летательного аппарата, гибкую связь, соединяющую каретку с источником энергии через соединенный с коробом ролик, отличающаяся тем, что гибкая связь выполнена в виде, по меньшей мере, одной гибкой упругой тяги, соединенной с торцом короба, который выполнен составным, содержащим незамкнутый короб и крышку, поверхность ролика расположена над крышкой, при этом короб оснащен направляющими, выходящими за ролик на расстояние, превышающее длину каретки.
20. Катапульта для запуска беспилотного летательного аппарата по п.19, отличающаяся тем, что ролик выполнен в виде установленных на одной оси подшипников, количество которых равно количеству упругих связей.
21. Катапульта для запуска беспилотного летательного аппарата по п.19, отличающаяся тем, что каретка оснащена двумя парами колес, которые выполнены с ребордами, охватывающими направляющие с двух сторон, а оси вращения колес перпендикулярны крышке полого цилиндра.
22. Катапульта для запуска беспилотного летательного аппарата по п.19, отличающаяся тем, что каретка и короб выполнены с соосными отверстиями в вертикальной плоскости для установки фиксатора-предохранителя в предстартовом положении каретки.
23. Катапульта для запуска беспилотного летательного аппарата по п.19, отличающаяся тем, что на коробе закреплен упор, в котором выполнены отверстия, соосные с отверстием в каретке в ее предстартовом положении, для установки в указанные соосные отверстия фиксатора, оснащенного гибким шнуром.
| US 7014141 B2, 21.03.2006 | |||
| RU 2060211 C1, 20.05.1996 | |||
| ЗАКОНЦОВКА КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2264328C1 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА С СЕЛЕКТИВНЫМ МАСШТАБИРОВАНИЕМ | 2000 |
|
RU2174745C1 |
| JP 2006264566 A, 05.10.2006 | |||
| СПОСОБ ВЗЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА С КАТАПУЛЬТЫ И КАТАПУЛЬТА ДЛЯ ВЗЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2344971C1 |

